基于卡尔曼滤波和特征指数化的电动汽车电池故障诊断方法研究*
2023-08-24 06:51武明虎杜万银张凡黄伟
汽车技术 2023年8期
武明虎 杜万银 张凡 黄伟
(1.湖北工业大学,太阳能高效利用及储能运行控制湖北省重点实验室,武汉 430068;2.湖北工业大学,新能源及电网装备安全监测湖北省工程研究中心,武汉 430068)
主题词:锂离子电池 故障诊断 卡尔曼滤波 特征提取 余弦相似度
1 前言
锂离子电池因其使用寿命长、可重复性高等性能优势而被广泛应用在电动汽车的能源系统中[1]。但是,电动汽车的能源系统会频繁发生故障,严重时会导致汽车燃烧。因此,电池组的早期故障诊断或者故障预警对保障电动汽车的安全性具有重要意义[2]。
电动汽车的能源系统故障类型一般有电池内短路、热失控、电池外部短路、连接错误、传感器故障等[3],目前对于电池组间的故障诊断研究一般可以分为3 类,即基于电池模型的方法、基于先验知识的方法和基于数据驱动的方法[4-5]。基于模型的电池组故障诊断方法一般需要构建精度较高的电池等效模型,利用参数估计方法对等效模型的参数进行估计,例如卡尔曼滤波、最小二乘法[6-7],对电池的物理模型和电池管理系统(Battery Management System,BMS)的计算能力要求较高[8-9]。基于先验知识的电池组故障诊断方法一般是利用专家知识或者建立判定规则进行故障诊断,主要方法包括模糊控制、专家系统等[10-12],但在随机性很强的实际车辆中规则建立困难[13]。基于数据驱动的方法一般是通过智能算法、数据分析方法,例如神经网络、聚类等直接从采集的数据中挖掘故障特征,并对其进行检测和定位[14]。文献[15]、文献[16]提出一种相关系数的方法,用于计算电池之间的相关性,来判定电池组内的故障电池。但是该方法应用在实际车辆数据上时,很容易导致相关系数误报。文献[17]提出一种基于随机森林的方法建立的电池内短路(Internal Short Circuit,ISC)诊断模型。该方法通过大量的数据学习得到一个收敛的故障诊断模型,但是该方法很难实现电池的在线故障诊断和热失控预警。因此,基于数据驱动的电池故障诊断方法是一种能够用于在线的电池故障诊断方法[18]。
本文利用基于数据驱动的方法,开发一种在线的电池故障诊断及预警方法。为解决云平台中采集的充放电过程数据中存在大量随机噪声的问题,提出一种基于历史数据和卡尔曼滤波的数据降噪方法,并提出一种特征指数化的特征提取方法,有效放大微小的故障特征。为了避免不一致性电芯带来的误报,提出一种基于余弦相似度(Cosine Similarity,CS)的故障值计算方法。最后,在实车数据上验证所提出方法的有效性、鲁棒性和可靠性。
2 故障诊断方法原理及步骤
2.1 基于卡尔曼滤波的数据降噪
实际采集的电池数据存在许多噪声,需对原始电压数据进行降噪,提高故障诊断精度。分析电动汽车的历史数据发现,电池的电压数据在很小的荷电状态(State of Charge,SOC)区间内不会有较大变化。因此,不同SOC 区间中的历史电压数据可以作为数据清洗的参考量。本文采用卡尔曼滤波算法融合电池传感器测量数据和电池历史数据的信息,使得采集的数据更加接近电池的真实工作状态。
假设从电池历史数据中提取的电压序列为:
式中,(t)为t时刻电池组内第i个单体在第c个充放电循环中的电压;J为电池组中的电池数量;K为历史循环数。
对于每个循环过程,需要计算不同SOC区间中单个电池最可能的电压值,以获得Ssoc-V序列,其中Ssoc为荷电状态,s为SOC区间序号。Ssoc-V序列的计算公式为:
式中,Mmed()表示取中位数;Vi(t)为截止到该循环的第i个电池的电压值数据集。
由此获得放电过程的Ssoc-V曲线,如图1所示。
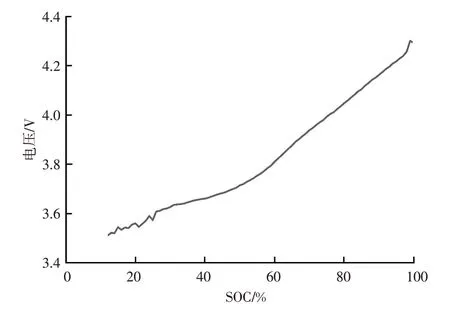
图1 放电过程的Ssoc-V曲线
获得Ssoc-V序列后,该序列被视为卡尔曼滤波器的估计值,传感器测得的电池电压值被视为观测量。可以如下获得卡尔曼公式:
式中,Hk为卡尔曼增益;Vk为最优估计;Pk-1为更新前的最优误差;Pk为更新的最优估计误差;Qk-1为初始测量误差。
由卡尔曼滤波算法计算的最优估计是最终滤波结果。估计结果会很接近正常运行期间电池的历史数据,且随机干扰信号将被去除,如图2 所示,图中采用周期为10 s。

图2 放电过程的原始电压值与估计值对比
2.2 电池故障特征分析及提取
为方便对故障特征提取的理解,以电池的Rint等效电路模型为例,分析电池组中某个电池出现内短路现象后的故障变化特征。电池单体的Rint 等效电路模型串联而成的电池包模型如图3所示,假设2号电池单体发生短路故障。
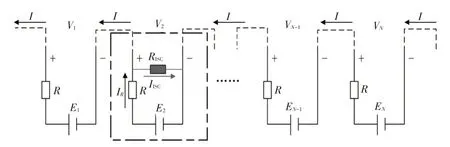
图3 电池组等效模型
电池组在正常情况下,各单体电池的电压表达式为:
式中,Vi为第i节单体的电压;E为开路电压;I为电流;Ri为第i节单体的等效内阻。
现假设2号电池发生内短路故障,则可以通过节点电压法、支路电流法列出该单体电路公式:
式中,IR为流过等效内阻支路的电流;R为电池等效内阻;IISC为短路电流;RISC为等效短路电阻。
再由节点电压法可以得出2 号电池单体的电压V2为:
结合式(9)、式(10),可以求解出2号电池单体的电压V2为:
可见,通过式(6)和式(11)的对比,由于RISC/(R+RISC)<1,发生短路故障的2 号电池单体电压V2会相比其他的电池单体电压小。通过实际工程验证发现,电池内短路故障前期的变化比较微弱,故障电压的变化是毫伏级别的[19]。因此直接利用未处理的电压数据来检测内短路故障很困难,尤其是在发生内短路的短时间内或者在故障发生前期检测故障。
为了解决该问题,引入指数函数的爆炸增长特征放大电压数据的微弱特征,便于故障检测。本文采用底数大于1的指数函数提取故障电池的电压特征。
假设有j个时刻,k个单体的电压数据:
式中,Fj,k为j时刻第k单体的指数特征值;Mmean(vj)为j时刻所有单体的平均电压;uj,k为j时刻第k个单体的电压;vjmax、vjmin分别为j时刻所有单体的最大、最小电压。
2.3 电池故障在线识别与定位及算法流程
2.3.1 故障检测与定位
业务、价值、机制都有了,难题就在于如何让参与方对设计者有信心。解决问题的本质力量来源于领导。领导的核心是唤起业务参与方对业务的信心。
虽然经过卡尔曼滤波的数据降噪和特征提取后,故障电池的故障特征被放大,易于识别,但电池组中不一致的电池也会表现出与其他电池不同的特征。因此,本文提出一种基于余弦相似度的故障值计算方法,以有效检测出故障单体并避免不一致电芯的误报。
余弦相似度也称为余弦相似性,用于描述空间中两个向量a、b的相似性。描述相似性的方法是计算2个向量夹角的余弦值:
假设2 个单体电池的数据为a=(a1,a2,…,an)、b=(b1,b2,…,bn),则
对相邻电池的指数特征序列进行遍历计算:
式中,f为故障值。
若某个电池i出现故障,则故障电池i与电池(i-1)的故障值将会很高,而其余正常电池的故障值会很低。因此可以判断i出现故障。此外需要说明的是,若电池i出现较高的故障值,而(i-1)的故障值较低时,则电池i不会被判定为故障,这一般是由于传感器采集的时间延迟导致的。然后基于3σ原则对各电池的故障值设置阈值,若有电池i出现故障,则该电池i与电池(i-1)的故障值就会触发阈值。
2.3.2 故障检测总体流程
假设当前有电压矩阵,如式(12),首先对电压矩阵进行数据滤波,再利用式(13)获得形如式(12)的特征矩阵。将特征矩阵作为余弦相似度算法的输入,经过余弦相似度算法的计算,可获得该电压组的故障值,并设置阈值,进行故障电池检测和定位。具体步骤如图4 所示:
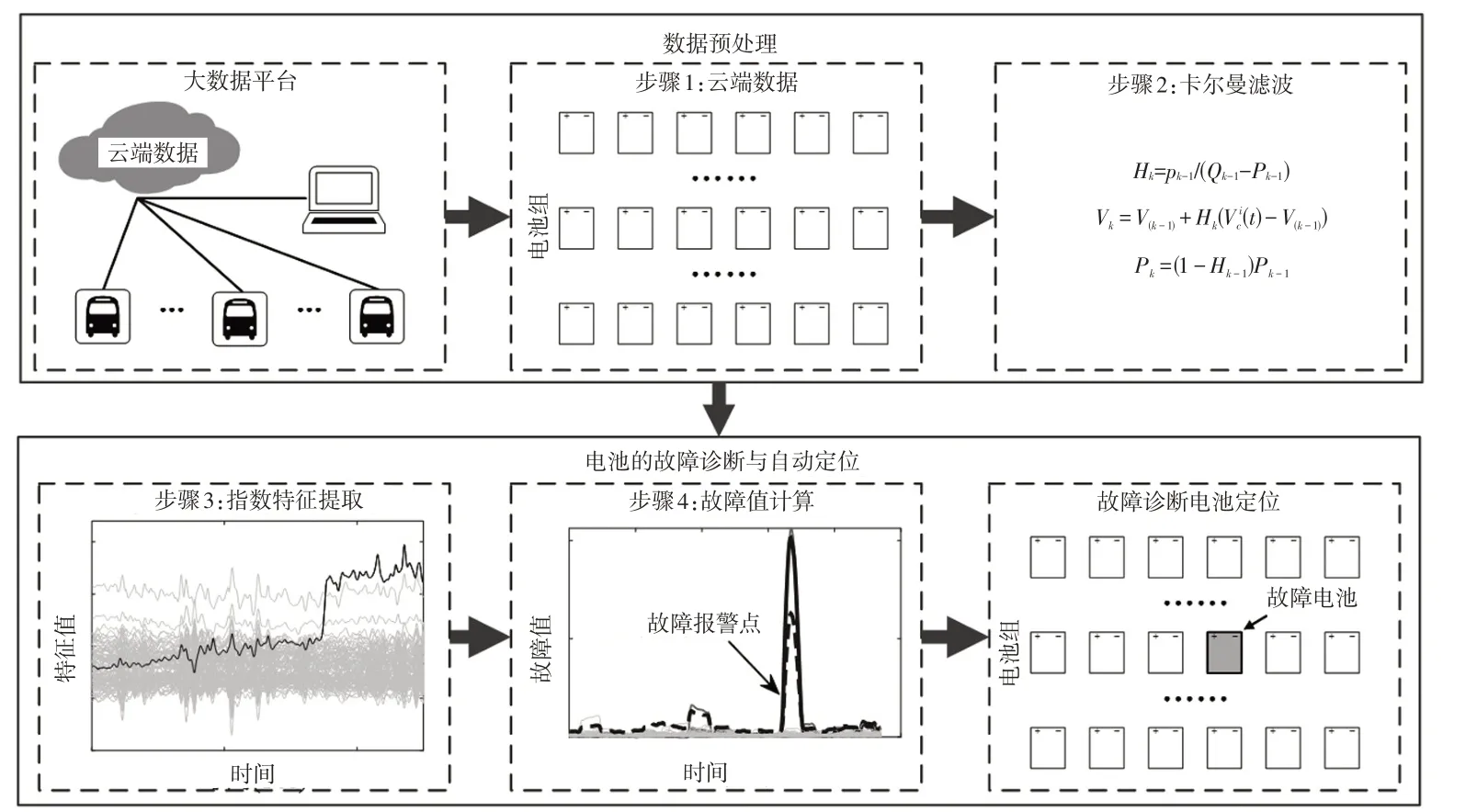
图4 故障诊断总体流程
a.获得从云平台中采集的实际运行车辆电池数据。
b.选择电压数据作为计算对象,并利用卡尔曼滤波对电压数据进行降噪。
c.对降噪后的电压数据进行特征提取,获得新的指数特征,从而放大故障电池之间的差异。
d.对故障电池识别和定位。将提取的指数特征作为余弦相似度算法的输入,计算各单体电池之间的故障值。为了完成故障在线检测,设置滑动窗口大小为30。根据3σ原则设置阈值,对故障值结果进行判定,超过阈值则认为该单体电池发生故障,并获得单体号。
3 云端数据及故障特征提取分析
3.1 大数据平台及数据采集
本文的试验数据来自某新能源大数据云平台,该平台每日采集数据量可超过百万条。本文从中选择2 台故障车辆数据作为试验对象。2台车相互独立,以车辆1、车辆2的放电过程为例进行试验验证。经确认,车辆1、车辆2都发生了内短路故障,2辆车的基本信息如表1所示。

表1 实际车辆数据信息
3.2 故障电池组数据及特征提取分析
图5a 给出了车辆1 的原始放电电压数据,77 号电芯发生内短路故障。从图5a 中可以发现,77 号电池电压下降很微弱,因此这类故障在BMS 中很容易被漏报。但是,经过卡尔曼滤波的数据降噪和指数特征提取后,如图5b 所示,77 号电池表现出很明显的故障特征。并且,77号电池随着采集时间的推移,指数特征值在第350~500 采样区间变得更大。这表示该电池的电压开始下降,与其他电池的电压差异越来越大。因此可以从指数特征值中推测该电池单体发生了内短路。此外,由于电池组内的电芯不一致性,39 号电池电压始终低于其他电池的电压,不属于故障检测范围,因此在故障检测时需要规避该类现象。
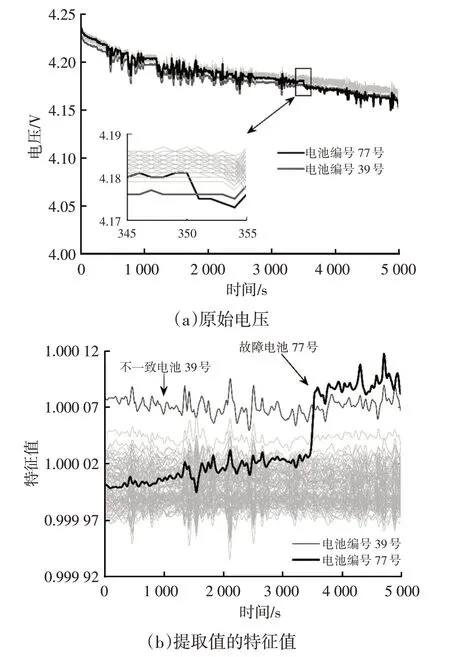
图5 车辆1的原始数据及指数特征提取结果
类似地,图6a 给出了车辆2 的原始电压。经确认,车辆2发生内短路故障,并存在传感器采集错误导致的数据异常点。从图6b 可发现,47 号电池的特征值在第450 个采样区间出现了相比于其他电池更明显的特征。而原始电压图中,虽然该电池的电压在后期出现了一定的电压差,但是与其他电池的电压相差不大,尤其是在电压下降初期。这种现象在故障前期很难被BMS检测。但是经过本文的指数特征提取后,约在第450个采样区间出现了十分明显的异常指数特征值。由特征值对应的纵坐标变化数值来看,车辆2求得的指数特征较车辆1 更加明显,这说明车辆2 电池组一致性较好。此外,在原始电压图中,第370 个采样区间出现了传感器错误导致的数据异常点,经过本文的卡尔曼滤波后,该数据点被剔除。
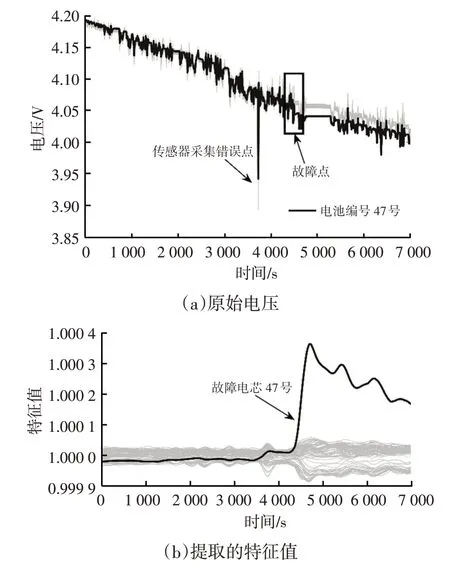
图6 车辆2的原始数据及指数特征提取结果
4 实际车辆诊断结果及分析
4.1 故障诊断结果分析
图7 给出了车辆1 的故障诊断结果。车辆1 在前320个采样区间电池组未发生故障,故障值计算结果基本都接近0。虽然约在第200个采样区间故障值出现了小幅波动,且76号电池超过阈值,但不符合故障判断规则。同样,87 号电池在第30 个采样区间也如此。而在第321 个采样区间,77 号电池和76 号电池的故障值超过了阈值T,算法报警,并且根据算法判定规则很容易定位故障电池编号为77。而车辆1 使用阈值法诊断结果如图8所示。39号电池超过报警阈值,这是电池的不一致性导致的。而本文所提出的算法计算的故障值规避了该现象,降低了故障诊断的误报率。
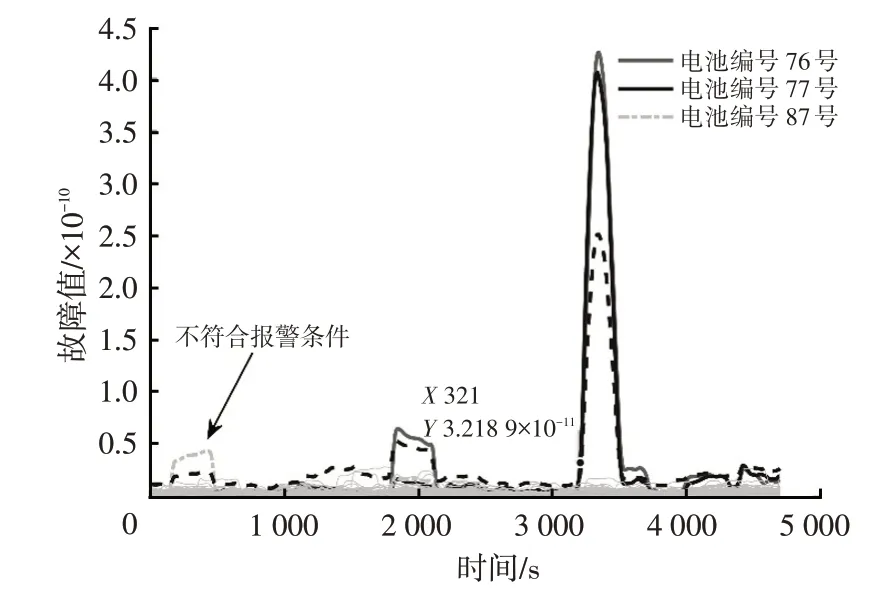
图7 车辆1的故障诊断结果
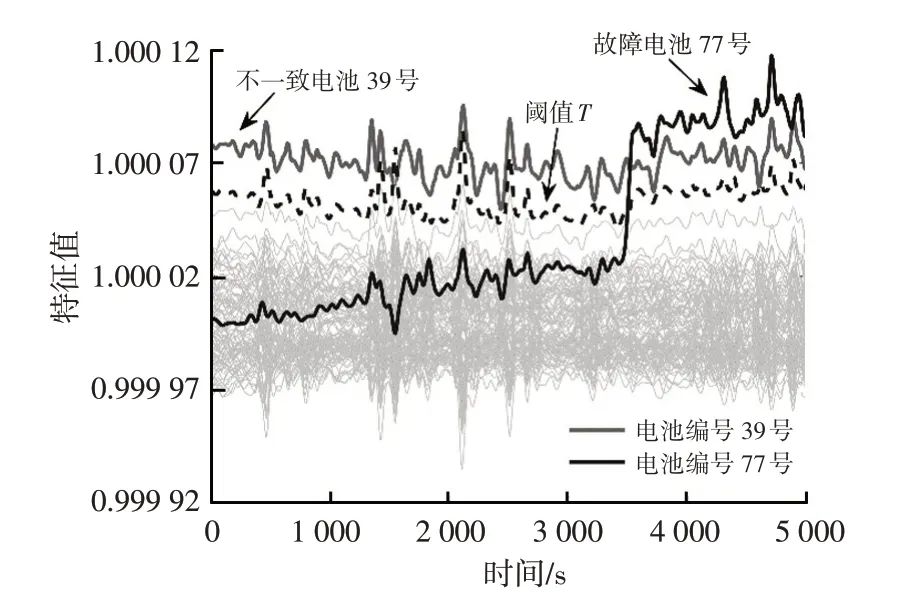
图8 车辆1的使用阈值法诊断结果
与车辆1类似,车辆2也发生内短路故障,并存在数据异常点。图9给出了经卡尔曼滤波处理的数据,在第370 个采样区间出现的传感器错误数据已经被剔除。图10所示为车辆2的故障值计算结果。相比于车辆1,车辆2 虽然存在数据采集异常,但电池组内一致性更好。因此车辆2在前期413个采样区间,各电池的故障值基本为0。而发生内短路故障的47 号电池,在第414个采样区间出现了十分明显的故障值。47号和46号电池同时超过阈值T,诊断算法报警,并根据判定规则定位到故障单体47号。而相比于原始电压,电压在第447个采样区间才出现了较为明显的压差,且BMS 对该点仍容易出现漏报。此外,车辆2在第373个采样区间出现的数据异常点,经过卡尔曼滤波降噪后,并没有对该故障点进行误报。因此,车辆2的诊断结果进一步证明了本文算法对内短路故障诊断的可行性,并能够对故障进行提前预警。
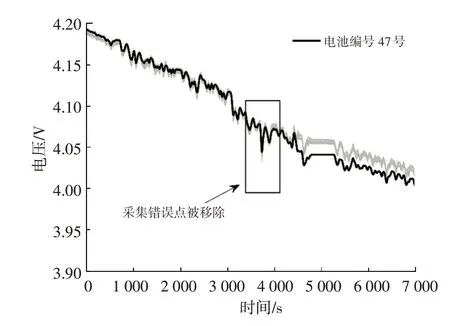
图9 车辆2的数据清洗结果
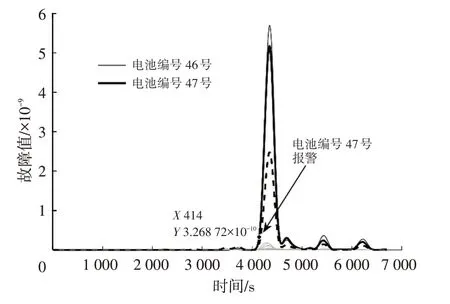
图10 车辆2的故障诊断结果
4.2 对比试验分析
为证明指数特征能够有效放大故障电池与正常电池的差异,现仅输入原始电压进行故障诊断。首先对电压进行卡尔曼滤波降噪,然后不经过故障特征提取直接输入到故障诊断算法中进行故障诊断。图11 展示了车辆2 的对比试验计算结果。从图11 中可以看出,虽然算法能够在第417 个采样区间检测出故障电池为47号电池,但图10中经过指数特征提取的计算结果显示,本文算法能够在第414 个采样区间就检测到异常电池为47 号电池,提前了30 s。此外,在图11 中第350 个采样区间,出现了对86 号电池的误报,而图10 中本文算法并未产生误报。因此,车辆2 证明了指数特征能够有效的将电压差异放大,易于后期的故障诊断算法检测,提高了准确率,并能够提前报警。
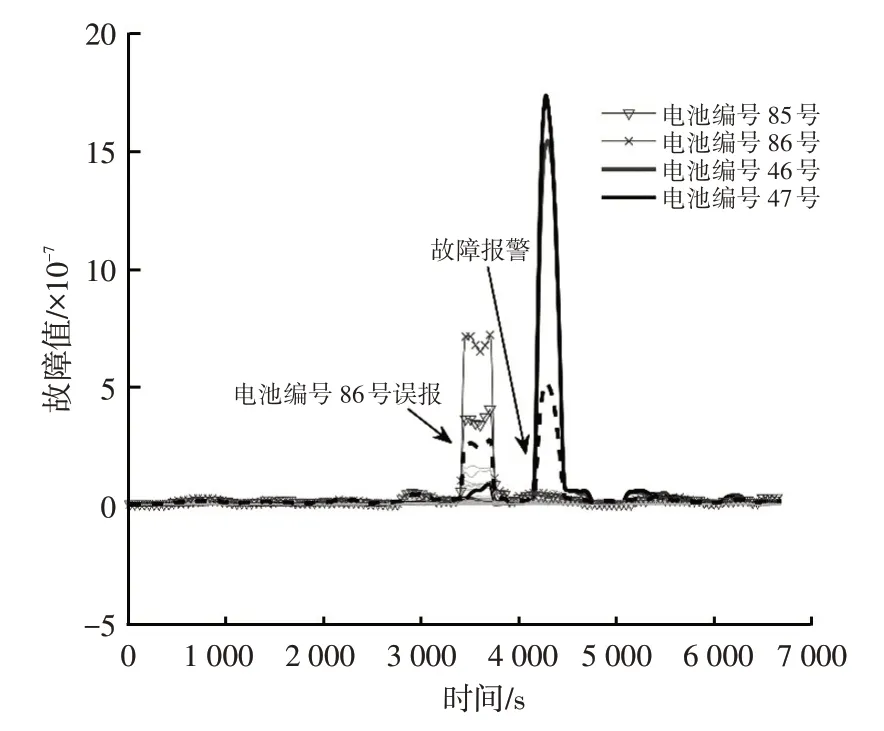
图11 使用原始数据的故障诊断结果
最后,引入相关系数法与本文所提出的方法进行对比。图12所示为车辆1的相关系数计算结果。从图12中可以看出,相关系数的结果对数据的异常值灵敏度很高,很容易产生误报,而对故障点的灵敏度却较低,很难准确检测出故障电池。
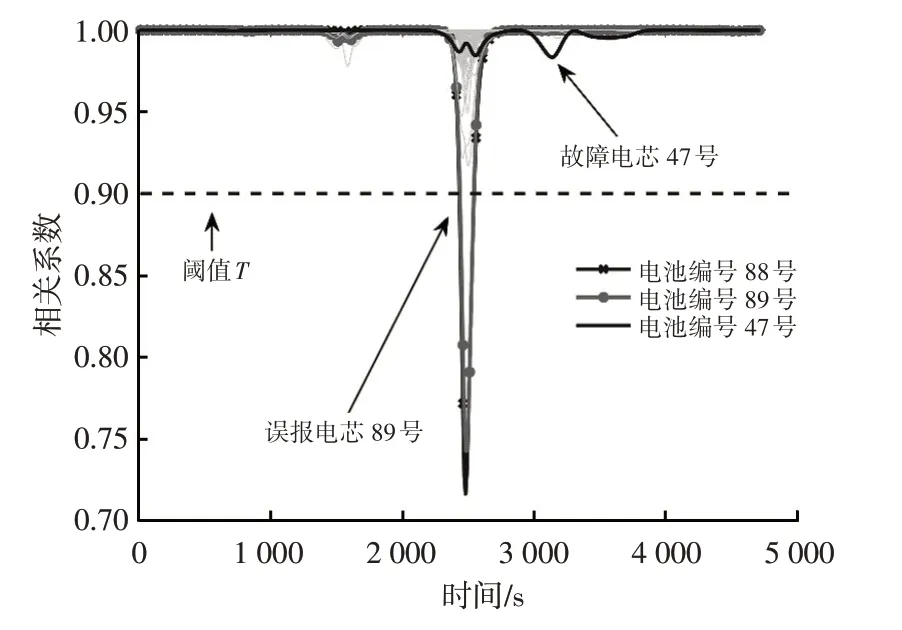
图12 相关系数计算结果
5 结束语
本文提出了一种可在云端数据中在线检测的电池故障诊断及预警方法。首先针对实际数据存在大量噪声问题,提出了一种基于历史数据和卡尔曼滤波的降噪方法;然后为解决故障特征不明显问题,提出了一种特征指数化方法;最后为了降低电池组内不一致性导致的误报,提出了基于余弦相似度的故障值计算方法,并结合自适应阈值进行故障电池检测和定位。通过2 台在实际运行中发生内短路故障的车辆和对比试验证明了本文所提出方法对电动汽车电池组故障诊断的有效性、鲁棒性和可靠性。
由于实际平台中对车辆电池的不同故障数据采集较少,未来的工作会考虑将本算法应用在更多的不同类型故障车辆上。
猜你喜欢
中国军转民(2017年7期)2017-12-19
北京航空航天大学学报(2017年9期)2017-12-18
消费导刊(2017年19期)2017-12-13
电源技术(2016年9期)2016-02-27
大连工业大学学报(2015年4期)2015-12-11
电源技术(2015年1期)2015-08-22
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
中国卫生(2014年10期)2014-11-12
中国神经精神疾病杂志(2014年1期)2014-03-01