
一种基于CNN算法的步态识别模型研究
2023-08-21 09:57张亦鸣王秋轶吴梓睿李文琳朱鹏宇丁浩
无线互联科技 2023年12期
关键词:深度学习
张亦鸣 王秋轶 吴梓睿 李文琳 朱鹏宇 丁浩
摘要:为解决传统步态识别模型训练时间长、识别准确率低等问题,文章构建了能够进行深度学习的行走时步态特征数据库,通过对所选取特征的特定性、关联性和稳定性的研究,建立步态特征矩阵,利用Tensorflow设计CNN算法进行深度学习,使其能够自动实现基于行走时步态特征的个人识别。在27名实验者情况下,该模型的识别准确率可达99%以上,且训练时间较短,优于目前已发表的其他模型,对构建更大数据库的识别系统具有啟发意义。
关键词:步态识别;CNN算法;深度学习
中图分类号:TP183 文献标志码:A
0 引言
随着时代和科学技术的发展,出现越来越多的身份识别技术,如肖军[1]、张震[2]、姚越武[3]等在人脸识别、虹膜识别和指纹等的研究成果获得广泛应用。步态识别技术作为生物识别的新兴技术[4-6],虽然近年来获得关注和发展,但由于特征稳定性不及前文所述的特征,神经网络的计算较为复杂等原因,尚未得到普及。
笔者通过查阅文献等方式,发现当前步态识别技术主要存在如下局限性:(1)尚无法实现个体的识别,只能实现对某些特定特征的种类识别。(2)直接利用原始坐标数据进行训练,计算量较大,且容易受到人所在的绝对位置的影响。
为减小计算量的同时保证识别的准确性,本实验构建了能够进行深度学习的行走步态特征数据库,在训练前提取步态特征矩阵,并对其特定性、稳定性和相互关联程度进行了论证,在减小后续训练计算量的同时实现了信息的挖掘,避免了人每次所在绝对位置的不同带来的误差。利用CNN算法进行深度学习训练,以期得到较优的训练结果,为构建更大规模个体身份识别数据库和计算方法提供相关技术支持。
1 数据采集
本实验采集了27名实验者,均健康状况良好,无明显不良行走习惯。本实验使用英国 Vicon三维运动捕捉系统。系统以主动红外捕捉的方式获取Marker点坐标。精确度和分辨率可以满足实验要求[7]。采集过程如下:
(1)定义原点并校准XYZ轴。其中,X轴方向为空间前后方向,Y轴方向为空间左右方向,Z轴为空间上下方向[8]。
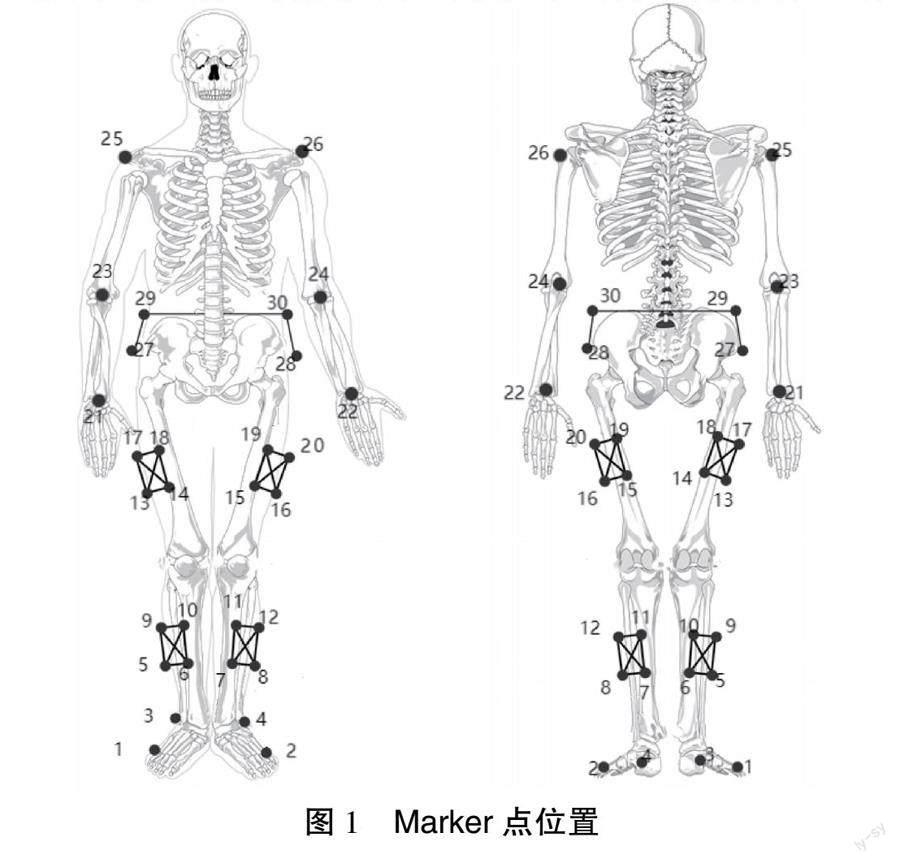
(2)实验者佩戴Marker点设备,佩戴部位如图1所示。右足:第五趾前端(Marker 1)和足跟外侧最突处(Marker 2);左足:两个第五趾前端(Marker 3)和足跟外侧最突处(Marker 4)。下肢共16个Marker点,分别为:左小腿佩戴仪(Marker 5,6,9,10),右小腿佩戴仪(Marker 7,8,11,12),左大腿佩戴仪(Marker13,14,17,18),右大腿佩戴仪(Marker 15,16,19,20)。左右手臂共6个Marker点,分别为左右手臂肱骨大结节处,左右手臂肘关节鹰嘴处,左右手臂桡骨远端
骨骺(左臂Marker点依次为Marker 25,23,21,右臂Marker点依次为Marker 26,24,22)。腰部佩戴仪4个Marker点(Marker 27,28,29,30)。
(1) 实验者沿X轴正方向自然行走,系统以100 Hz/s的频率采集各个Marker点的三维坐标。
(2) 多次采集,每名实验者采集20次。
2 步态特征模型建立
2.1 周期截取
数据采集时以一个复步为周期。考虑到人的单次普通步行过程可以分为起足、碾足、落足3个阶段,故每个周期步的计时从左脚起足即足根部离开地面开始,到左脚第二次完成落足即足尖落至地面结束。绘制左足第五趾骨高度和左足足跟高度随时间变化的图像。通过最小峰值间隔MRD、峰值两侧最小相对高度MRH识别出所有峰,定义识别出的第一个峰时间为T1,最后一个峰对应的为T2,从而定义一个模型周期T。计算方式如下:
offset=[200-T1+T2]/2(1)
T=(T2+offset)-(T1-offset)(2)
式(2)中,(T1-offset)为周期起始帧,(T2+offset)为周期结束帧。本实验中MRD=35,MRH=8。
2.2 特征选取
为了表述方便,本文以Ni表示编号为i的Marker点,以Xi、Yi、Zi分别表示编号为i的Marker点的X、Y、Z轴坐标。利用空间几何的方法对如下特征进行计算:
t时刻左右肘关节角度为αt1和αt2,使用大臂和小臂的夹角来表示,以右臂为例其计算方法为:
αt1=arccosN23N21·N23N25N23N21×N23N25(3)
αt2的计算与之类似。
t时刻左右大臂相对于在XZ平面上相对于Z轴的摆动角度为βt1和βt2,以右臂为例其计算方法为:
βt1=arctanY23-Y25X23-X25(4)
βt2的计算与之类似。
t时刻左右膝关节在XZ平面投影的角度为γt1和γt2,反映了膝关节在前后方向上的角度变化;在YZ平面投影的角度δt1和δt2反映了是否存在X形腿、O形腿。设Marker 17,18、Marker 13,14、Marker 9,10、Marker 5,6的中点依次为点A、B、C、D,则其计算方法为:
γt1=arccos(XA-XB)×(XD-XC)+(ZA-ZB)×(ZD-ZC)((XA-XB)2+((ZA-ZB)2×((XD-XC)2+((ZD-ZC)2(5)
δt1=arccos(YA-YB)×(YD-YC)+(ZA-ZB)×(ZD-ZC)((YA-YB)2+((ZA-ZB)2×((YD-YC)2+((ZD-ZC)2(6)
γt2、δt2的计算方式与之类似。
t時刻左右踝关节角度为εt1和εt2,其计算方法为:
εt1=arccosN3N1·DCN3N1×DC(7)
εt2的计算方式与之类似。
t时刻肩部两端的连线摆动与Y轴形成的角度为θt,计算方法为:
θt=arctanY26-Y25X26-X25(8)
t时刻腰部摆动与Y轴形成的角度为t,设Marker 27,29、Marker 28,30的中点分别为I、J,其计算方法为:
t=arctanYJ-YIXJ-XI(9)
t时刻双足夹角为μt,反映了人行走时双脚外展、直行或内收的情况,其计算方法为:
μt=arccosN23N21·N23N25N23N21×N23N25(10)
t时刻左右手腕部与腰部中点Y坐标的差值为dt1和dt2,反映了手臂内摆程度的变化。设Marker27,28的中点为K,则其计算方法为:
dt1=Y21-YK(11)
dt2的计算方式与之类似。
t时刻左右足跟与腰部中点Y坐标的差值为dt3和dt4,反映了行走时步宽的情况。其计算方法为:
dt3=Y3-YK(12)
dt4的计算方式与之类似。
每次采集的数据经过如上模型计算后得到步态特征矩阵Aji(i表示实验对象编号,j表示该实验对象的测量次数)。
2.3 对所选特征的考察与论证
特定性:将2.2节得到的步态特征矩阵以实验者为单位进行合并,分别检验每个特征在不同实验者之间是否具有显著差异性。以特征为单位分别进行方差齐性检验后,用不假定等方差中的塔姆黑尼检验。显著性结果为0.05时,各个特征在不同个体之间具有显著性差异的组数占总组数的比例均在90%左右,表明可以以此为依据区别个体。
关联性:利用偏相关分析研究特征之间相互影响的程度,并将相关性系数作为考察指标。检验结果表明,相关系数普遍分布在[-0.2,+0.2]之间,说明特征之间相互关联的程度较低,各个特征之间具有较强的独立性,它们的相互组合是有意义的。
稳定性:利用成对样本T检验考察特征在同一个体的稳定性,并以显著性水平0.05作为评判依据。结果表明,各个特征稳定性在55%~70%左右。考虑到实验者在各次采集中所穿着的衣物、鞋子以及身体状态不同,符合现实中步态识别的客观要求,故可以认为特征具有相对稳定性。
3 CNN训练模型
对每个特征矩阵,以列为单位线性归一化(Min-Max Scaling)。为减少数据量偏少的影响,对每个个体的特征矩阵进行复制3倍扩充数据。
本模型结构由3个“卷积层—池化层”相连,最终由全连接层输出。
本模型其他主要超参数介绍如下:学习速率为0.01,迭代次数(Epoch)为50,卷积层使用Relu函数作为激活函数,池化层进行2×2大小的Maxpooling计算。全连接层使用Softmax作为激活函数。为提高模型的泛化能力,设置神经元的随机失活率为0.5。损失函数使用交叉熵函数,与Softmax联合使用,用它来衡量网络的输出与标签的差异,利用这种差异经过反向传播去更新网络参数。
4 实验结果与分析
在训练50轮后,loss为0.022 8 ,accuracy为0.993 8 ,val_loss为0.0174 ,val_accuracy为0.993 8,并已经收敛。
Macro-F1是一种衡量多标签分类精确度的一种指标,是查准率和精确率的调和平均数。经过50轮训练后F1_score可以达到0.991 849,表明模型具有较高的识别准确率和可信度。
5 结语
在27人的样本下,与现有模型相比,该模型的训练耗时更短、准确率更高。由于硬件设备等原因,目前难以构建规模更大的数据库,尚无法验证提出的步态识别模型是否可以实现大规模应用的要求。但对于小范围内的不同人,已经拥有了很高的精度。因此,在将来采集设备进一步发展,采集数据更加方便的情形下,本文可以为构建更加高效的模型提供理论依据。
参考文献
[1]肖军.人脸识别技术在追逃工作中的应用现状与展望[J].刑事技术,2016(2):137-141.
[2]张震,刘博,李龙.一种多特征提取及融的虹膜识别方法[J].郑州大学学报(工学版),2017(1):63-67.
[3]姚越武,丁宏,马继雄,等.指纹自动识别系统多种算法互补能力研究[J].刑事技术,2017(5):385-388.
[4]LEES A,VANRENTERGHEM J. The energetics and benefit of an arm swing in submaximal and maximal vertical jump performance[J].Journal of Sports Sciences,2006(1):51-57.
[5]王亮,胡卫明,谭铁牛.基于步态特征的身份识别[J].计算机学报,2003(3):353-360.
[6]赵黎丽,侯正信.步态识别问题的特点及研究现状[J].中国图像图形报,2006(2):151-161.
[7]马越,丁浩.人行走过程中膝关节角度特征研究[J].刑事技术,2019(4):322-326.
[8]王闪闪.GPS单基线姿态测量系统研究[D].长春:长春理工大学,2010.
(编辑 王永超)
Research on a gait recognition model based on CNN algorithm
Zhang Yiming, Wang Qiuyi, Wu Zirui, Li Wenlin, Zhu Pengyu, Ding Hao*
(Jiangsu Police Institute, Nanjing 210000, China)
Abstract: In order to solve the problems of long training time and low recognition accuracy of traditional gait recognition models, a walking gait feature database capable of deep learning is built. Through the study of the specificity, relevance and stability of the selected features, a gait feature matrix is established. The CNN algorithm designed by Tensorflow is used for deep learning, so that it can automatically realize personal recognition based on walking gait features. In the case of 27 experimenters, the recognition accuracy of the model can reach more than 99%, and the training time is shorter, which is superior to other published models. It is instructive for building a recognition system with a larger database.
Key words: gait recognition; CNN algorithm; deep learning
猜你喜欢
中国教育技术装备(2016年19期)2016-12-27
江苏教育·中学教学版(2016年11期)2016-12-21
江苏教育·中学教学版(2016年11期)2016-12-21
考试周刊(2016年94期)2016-12-12
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
考试周刊(2016年64期)2016-09-22
