
双参数优化的混合动力汽车能量管理策略研究
2023-08-18 06:38严陈希黄明宇史定洪
机械设计与制造 2023年8期
严陈希,黄明宇,史定洪,邹 晔
(1.无锡职业技术学院汽车与交通学院,江苏无锡 214121;2.南通大学机械工程学院,江苏南通 226019)
1 引言
能量管理系统是一个典型的非线性多目标动态优化系统,其合理控制是提高混合动力汽车(Hybrid Electric Vehicle,HEV)经济性、动力性等性能的关键。目前,能量管理系统中基于优化的策略研究较为广泛,可分为全局优化和瞬时优化。
全局优化理论上能实现车辆性能最佳,但须满足工况预知的前提,难以实时应用,因此近年来其与工况预测等技术相结合成为研究的热点。文献[1]利用两个神经网络模块建立了一款在线能源管理控制器,并根据动态规划算法对动力电池电流的优化结果,实现了控制器实时控制。文献[2]以能量价格比为优化目标,提出了一种根据约束条件及部件物理特性确定未来可达状态序列的改进型动态规划算法,从而实现能量管理。文献[3]以电池和燃料能量损失为导向,运用动态规划算法实现能量管理策略开发,并结合驾驶模式识别提出了基于规则的多模式切换策略。由以上研究可见,全局优化已不单只能用作评价指标,在实时应用上也大有成就。但相比而言,以等效油耗最低策略(Equivalent Con⁃sumption Minimization Strategy,ECMS)为代表的瞬时优化能在更好的实现实时优化基础上得到近似全局最优解。目前,ECMS策略的研究主要以等效因子和工况为主。文献[4]首先设计了一种等效因子快速计算法,通过在线更新等效因子,提出一种基于电池荷电状态(State of Charge,SOC)线性下降的自适应等效燃油消耗最低策略;文献[5]采用遗传算法进行隶属函数参数和规则的调整,对不同道路工况下实车控制策略进行实时切换,以实现等效油耗最低优化目标。
文献[6]针对不同工作模式采用基于规则的控制进行划分,并控制等效因子随功率需求和电池充电状态的变化来实现ECMS策略的能源管理优化。
这些研究中仅考虑了不同等效因子下的动力源功率分配与SOC平衡控制,而发动机起停规则对于策略的节能潜力也具有重要影响。
面对以上问题,这里以挖掘策略的节能潜力为目标,以发动机起停规则、等效因子、工况类型三个参数作为策略优化对象,设计了一种基于改进型粒子群算法的双参数优化等效燃油消耗最低策略(AD−ECMS),从而实现最优等效因子和发动机起停规则随工况类型实时更新,进一步提升整车经济性。
最后,经仿真对比分析和实验验证,证明策略在经济性和SOC平衡性上的优势。
2 ECMS策略及节能潜力
2.1 混合动力系统方案
为了研究ECMS策略的节能潜力,选择混合动力汽车中新型功率分流式混合动力系统[7]作为研究对象,其系统结构,如图1所示。整车及动力系统主要参数,如表1所示。

表1 整车及动力系统主要参数Tab.1 Vehicle and Powertrain Main Parameters
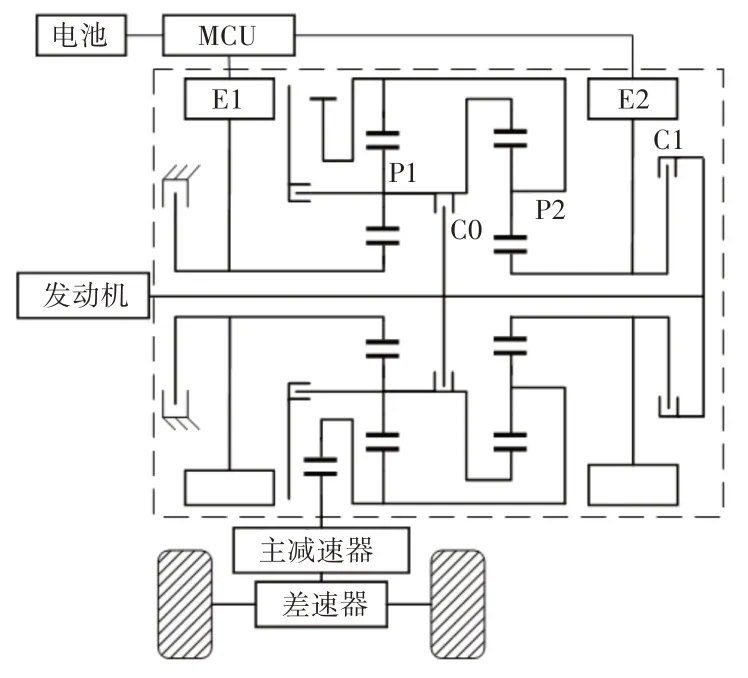
图1 HEV动力系统Fig.1 Powertrain of HEV
2.2 ECMS策略
这里采用MATLAB/Simulink与AMESim联合仿真平台搭建整车模型,并建立ECMS策略将其应用到控制模型中,进行车辆动力部件的能量管理,为这里后续研究提供基础。
ECMS策略的原理旨在利用等效因子将油、电消耗等效为综合油耗[8],以当量比油耗Esys最低为优化目标,从而确定动力部件功率分配。Esys可以理解为将变速箱与发动机ENG整体当作虚拟发动机,输入燃油,输出有效功率,具体表达如下式:
当电池充电时:
当电池放电时:
式中:Pe—发动机功率;PHo—整车需求功率;PB_out、PB_ist—充、放电下的电池功率;BSFC—ENG比油耗;S—等效因子。
2.3 ECMS策略节能潜力的探究
因ECMS节能效果有限,大量研究者对ECMS策略进行了优化改进,目前的优化研究主要集中在工况和等效因子[9]两方面。然而,就经济性提升而言,是否存在除这两者之外的其他参数能够实现优化效果,还有待探究。
从控制原理分析,整车控制是根据实车反馈的瞬时需求功率来实现对动力部件功率分配的在线插值。当等效因子确定,车辆各需求功率下动力源功率分配规则随之确定;当工况确定,车辆实时行驶需求功率确定。可见,等效因子和工况决定了车辆每瞬时时刻的油电分配,理论上可得到最终油电消耗比例。然而,从控制策略优化的角度讨论,发动机的起停会导致动力部件工作在不同状态,也易对整车油电消耗产生影响。
为探究发动机起停规则对整车经济性的影响,对不同起停规则下策略的油电消耗进行了分析。
选取NEDC工况,取等效因子值为280g/kWh,改变发动机起停时机,得到仿真结果,如图2所示。
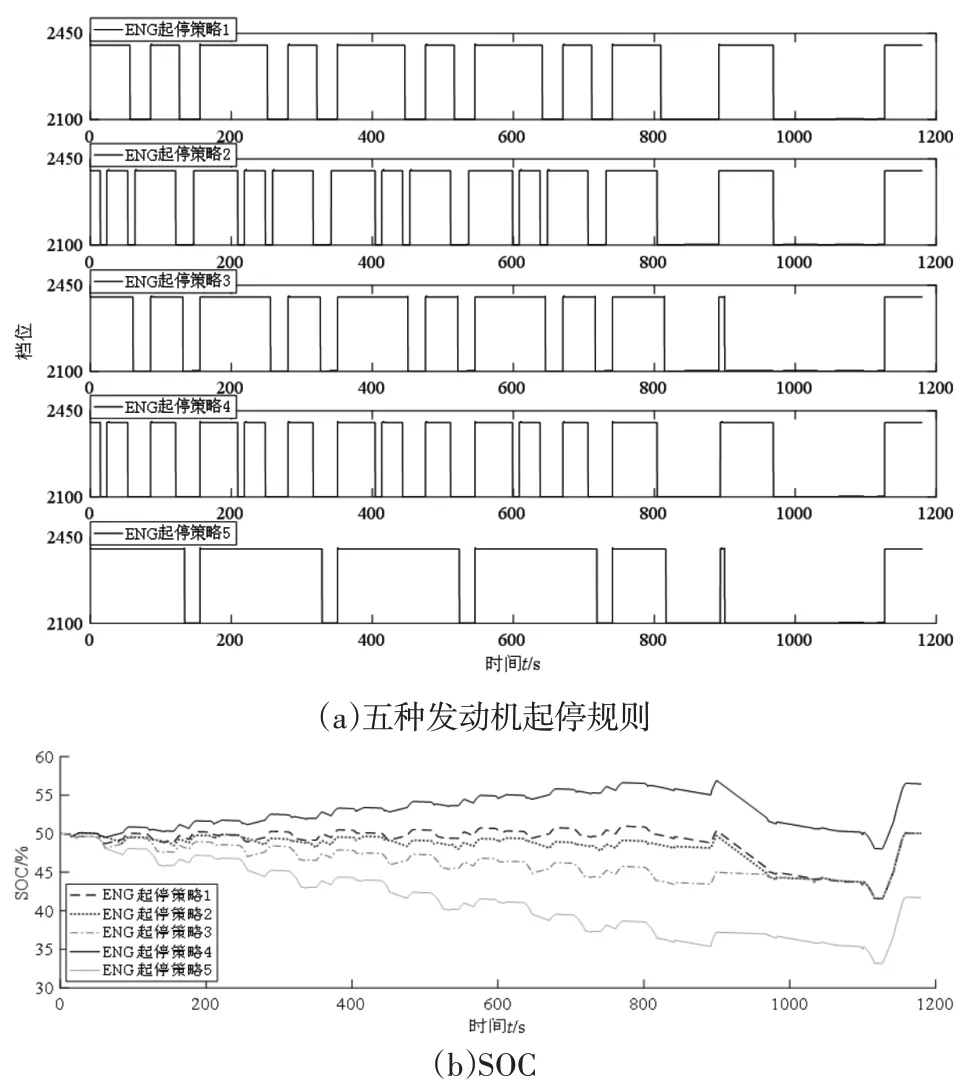
图2 不同发动机起停规则下的油电消耗仿真结果Fig.2 Simulation Results of SOC and Fuel Consumption Under Different Engine Start−Stop Rules
如图ENG起停策略1、2、5,当发动机起停规则发生变化时,车辆运行在每一瞬时的动力系统状态改变,导致瞬时时刻动力部件的能量分配不同,因此,油电消耗比例也会不同。ENG起停策略2、3、4,最终能保持电量SOC平衡,但随着ENG起停规则的变化,车辆在每一瞬时的油电分配发生改变,电量变动存在差异,消耗的燃油也各不相同。
可见,基于同工况类型和同等效因子下的ECMS策略,即使策略控制电量SOC平衡,不同的起停条件也会导致电量变动及油耗的差异,最终对整车经济性造成影响。
3 基于IS−PSO算法的参数优化
基于上述探究结果,为实现策略更好的节油效果,提出一种针对不同工况类型对最优等效因子参数及发动机起停规则参数同时进行优化的改进型粒子群算法IS−PSO。
3.1 IS-PSO算法
粒子群算法(Particle Swarm Optimization,PSO)[10−11]属于进化算法的一种,其将每个优化问题的潜在解均视为一个粒子,每个粒子追随目标函数按下式不断搜索并更新在解空间中飞行的速度和位置,此过程称为迭代,最终找到最优解。
式中:vid、xid—第i个粒子更新的速度和位置;c1、c2—学习因子,一般取值范围在[1,2.5],c1=c2=2;r1、r2—0~1之间均匀分布的随机数;ω—惯性权重,ωmax=0.9,ωmin=0.4;M—当前迭代步数;Mmax—最大迭代次数。
IS−PSO算法流程,如图3所示。算法由内外层嵌套而成,内层以等效燃油消耗最低为优化目标,用于计算当前等效因子下,各档位随整车需求功率变化时对应的发动机工作点的优化,以及最优发动机起停规则;外层加载内层计算得到的规则表,并运行当前工况,反馈SOC,通过迭代优化,控制SOC平衡。

图3 IS−PSO算法流程Fig.3 Flow of IS−PSO
3.2 参数优化实现步骤
IS−PSO算法的基本步骤如下:
(1)初始化种群及算法参数,包括迭代次数M、粒子数NL,粒子初始随机位置与速度,速度更新的限制等。
(2)依次选择第M代的粒子群,M=M+1,若M≤Mmax,则调用每个粒子向量为Xi=(xi1,xi2,…,xiNL)进入算法计算最优功率分配的内层;否则,跳转至步骤(8)。
(3)内层利用等效燃油消耗最低策略的原理进行寻优,计算当前粒子i跟踪总油耗最低的目标得到的各档位下发动机与电机的最优功率分配规则,并输出到外层算法进行收敛。
(4)控制策略内部油电分配比例同时受控于动力部件功率分配和发动机起停规则,步骤(3)内层的当前粒子i下的各档位总油耗输入至发动机起停on/off(内层)进行跟踪随需求功率变化时的油耗最小档位状态,控制发动机起停。输出档位状态到外层算法与步骤(3)的功率分配规则同时进行收敛。
(5)加载各档位功率分配规则表、发动机起停规则表以及已知的模型中各需求量数据,加载Simulink/AMESim 联合仿真模型,运行当前行驶工况。
(6)运行结束提取末端SOC反馈至.m文件,建立适应度函数△SOC=|SOCend−SOC0|。
(7)以SOC平衡为最终收敛目标,判断是否收敛,若收敛,更新个体最优与全局最优值。
(8)取收敛终值为0.1,当△SOC>0.1且M 利用IS−PSO 算法对几种涵盖不同交通状况的典型工况进行等效因子和发动机起停规则优化。首先选取的六种工况类型:城市工况、郊区工况、高速工况,和中国乘用车行驶工况CLTC_P的低、中、高速段三部分,如图4所示。 图4 六种典型工况Fig.4 Six Typical Driving Cycles 经IS−PSO算法的求解,得到的等效因子优化结果,如表2所示。发动机起停优化结果为以功率分配为横纵坐标的表格,篇幅过大,这里不作具体展示。 表2 六种典型工况在IS-PSO算法下求解结果Tab.2 The Solution Results of Typical Driving Cycles Under the IS-PSO 基于IS−PSO算法优化结果,在识别工况后调用最优等效因子,并不断更新最优发动机起停参数,以使得能量管理的实际控制效果达到预期。 采用模糊控制器工况识别研究,建立在线识别模型,如图5所示。取识别周期tp为200s,目的在于既能满足该周期内车辆的实时识别具备一定可信度,又不会因路段过长而产生干扰。 图5 工况识别控制示意图Fig.5 Diagram of Working Condition Recognition 在在线识别模型中,模块Discrete Mean Value中基频设置为1/200,采样时间设置为0.01s。 将工况识别器与IS−PSO 算法优化得到的各典型工况下等效因子相结合,应用到ECMS策略中,提出一种单参数优化的A−ECMS策略。 为进一步提高策略节油潜能,并实现在随机工况下调整档位调度控制SOC 平衡,提出一种基于工况自适应的双参数优化AD−ECMS 策略。该策略同时调用当前识别工况的最优等效因子和发动机起停规则,以实现动力源间的最优分配。AD−ECMS策略流程图,如图6所示。 图6 AD−ECMS能量管理策略流程Fig.6 Flow of AD−ECMS Energy Management Strategy AD−ECMS策略根据当前识别工况类型,由实车反馈的需求转速与扭矩查表插值输出对应的档位状态;随后,在控制模型中控制发动机起停;根据ECMS 策略进行发动机及电机的功率分配,实时控制车辆行驶。 为评价所提策略的经济性和电量平衡性,主要从油电消耗、发动机及电机工作点三方面分别对基于规则的实车控制策略、ECMS策略、A−ECMS 策略和AD−ECMS 策略进行对比分析。随机组合6 种典型工况形成综合测试工况,初始电池电量设置为50%,得到四种策略下的油电消耗变化曲线,如图7所示。 图7 四种策略下的油耗与SOCFig.7 Simulation Results Under Four Strategies 由图7(a)可知,AD−ECMS策略下的车辆行驶完每段工况后电量与初始值的差值分别为1.866%、3.586%、4.392%、4.927%、4.713%,能大致恢复至SOC 初始值附近。对比其他三种策略,AD−ECMS策略更能自行调整SOC平衡。 因不同控制策略下的末态SOC不一样,无法直接对车辆的油耗进行客观合理的评价。为公平地评价几种策略燃油经济性的优劣,根据式5将电量等效为发动机油耗得到总油耗。并计算得到四种策略下车辆行驶完全程的总油耗,如表3所示。 表3 四种策略下的仿真结果Tab.3 Simulation Results Under Four Strategies 式中:S—等效因子(无量纲参数),单位换算公式为S=S(g/kWh)·Q1hv/3600/1000;PB—电池功率,单位是ω·h;C—电池包额定容量,C=6A·h;U—额定电压,U=316V;发动机油耗—单位为L/100km;L—车辆总行程;ρ汽油—汽油密度,ρ汽油=0.725g/mL。 可以看出,AD−ECMS策略下的总油耗相比于基于规则的实车控制策略和标准ECMS策略分别降低了24.265%和14.684%,经济性有较大提升。对于已进行等效因子优化的A−ECMS策略而言,AD−ECMS策略进一步将发动机起停规则调用至整车控制策略中,总等效油耗相对降低2.157%,SOC 平衡能力上升24.158%。这里AD−ECMS策略的总等效油耗相比A−ECMS策略仅有较小降低,原因在于:AD−ECMS策略通过调用的发动机起停规则表在控制档位调用时,需同时衡量最低等效油耗与电量平衡,而为了配合电量平衡,调用档位时会牺牲经济性,因此相比A−ECMS策略,AD−ECMS策略燃油经济性有小幅度上升,但却能兼顾电量平衡。 ECMS、A−ECMS和AD−ECMS 策略下的发动机工作点对比图,如图8所示。 图8 发动机工作点Fig.8 Working Points of Engine 统计得这三种策略下的燃油消耗量在255g/(kWh)以内的占比分别达到39.63%、49.88%和56.19%,可见AD−ECMS策略的发动机工作点更有效的集中在高效区域,对油耗和排放均有所改善。 三种策略下的电机工作点分布,如图9所示。电机工作点在四个象限均有分布,存在电动和发电工况。除去为保持杠杆平衡电机锁止或空转的工作分布点以外,统计得ECMS、A−ECMS 和AD−ECMS策略下电机E1效率达到百分之八十以上的工作点分别占24.98%、35.24%和37.57%;电机E2效率达到百分之八十以上的工作点分别占69.21%、71.69%和72.19%。可见,AD−ECMS策略下的电机能工作在更高的效率区间。 图9 电机工作点Fig.9 Working Points of Motor 为进一步验证AD−ECMS策略的有效性,进行了整车转毂油耗实验,如图10所示。因试验条件限制,选取天津城郊路谱进行三种策略下的实验验证。实验条件为,初始SOC=0.5,大气温度T=24.6℃,大气压力P=102.8kPa,相对湿度%RH=30.7%,汽油密度ρ=0.7591g/ml,测功机当量惯量为1470kg。实验数据通过ETAS公司的软件INCA和硬件ES 592进行采集。 图10 整车转毂油耗试验Fig.10 Fuel Consumption Test for Vehicle Hub 实验结果,实验车速总体跟随良好,如图11所示。实验所得改进型策略下的SOC轨迹及油耗与基于本研究仿真趋势基本一致,验证了模型的可行性。同时,实验测得的ECMS策略的发动机油耗为4.664L/100km,电量减少10.2%;A−ECMS 策略油耗为4.423L/100km,电量上升5.57%;AD−ECMS 策略油耗为4.133L/100km,电量减少2%。可见,AD−ECMS 策略试验下的经济性相比另两种策略均有所提升,并有更好的电量平衡性。 图11 实验结果Fig.11 Experimental Results 三种策略试验下的发动机转速扭矩变化图,如图12所示。 图12 发动机转速扭矩变化曲线Fig.12 Engine Speed and Torque 相比ECMS和A−ECMS策略,AD−ECMS策略减少了发动机在低速低扭矩的工作点,使其工作在更优区间,对发动机排放也有一定改善。 同时减少了发动机起停次数,避免其工作在整车需求功率较小的阶段。因此,进一步证明了AD−ECMS能更有效的提高整车经济性,以及控制电池电量平衡能力。 (1)这里针对一款双行星排式的新型功率分流系统,进行ECMS策略节能潜力的探究,得到策略在等效因子、工况类型和发动机起停规则均可进一步研究以实现更高整车经济性。 (2)提出一种改进型粒子群算法IS−PSO,算法以功率分配、发动机起停和SOC收敛为内外三层嵌套而成。最终实现在不同工况下对最优等效因子及发动机起停规则进行内外层求取的优化目标。 (3)根据在线工况识别类型,提取IS−PSO 算法求解到的最优等效因子和发动机起停规则,与ECMS结合,提出一种双参数优化的AD−ECMS能量管理策略。 并对策略进行仿真分析和试验验证,仿真结果表明了模型和策略的有效性,及不论在整车经济性还是电量平衡性方面,所提策略均备更好的效果。3.3 参数优化结果


4 基于工况识别的双参数优化AD−ECMS策略
4.1 A-ECMS策略

4.2 AD-ECMS策略

4.3 仿真对比分析
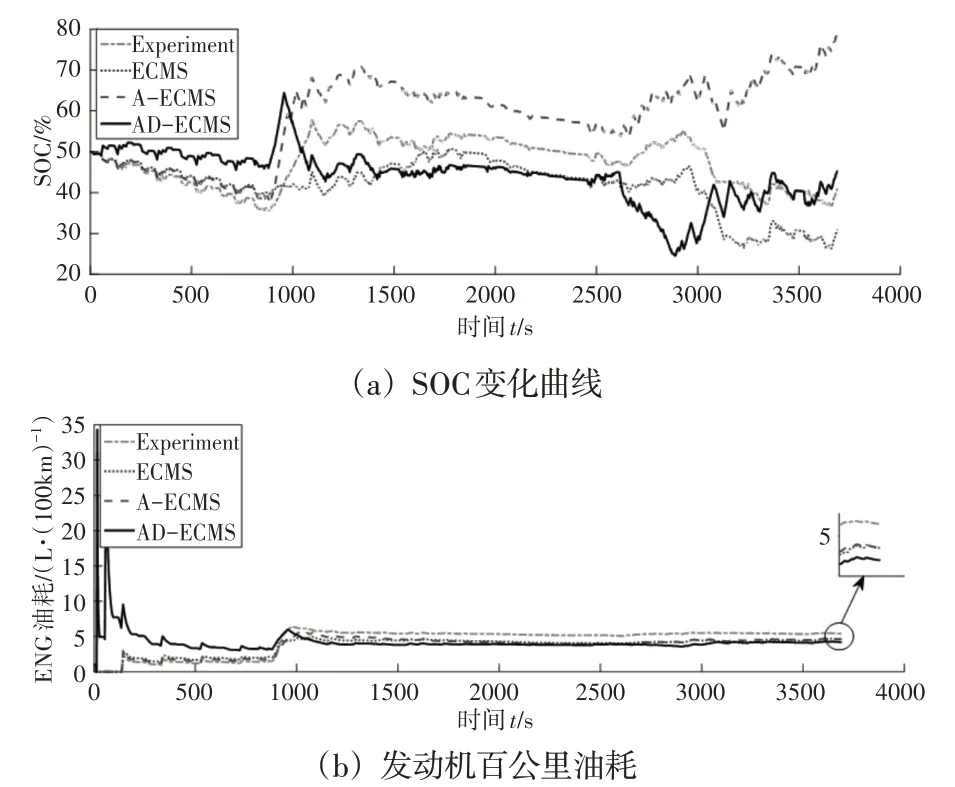



5 整车转毂实验



6 结束语
猜你喜欢
车主之友(2022年5期)2022-11-23
学苑创造·B版(2022年9期)2022-05-30
小猕猴智力画刊(2022年3期)2022-03-29
数学小灵通(1-2年级)(2021年4期)2021-06-09
四川水力发电(2018年4期)2018-03-25
上海铁道增刊(2017年3期)2018-01-22
车迷(2017年12期)2018-01-18
Coco薇(2017年11期)2018-01-03
暨南学报(哲学社会科学版)(2016年9期)2017-01-15
铁道通信信号(2016年8期)2016-06-01
