
一种消防侦查机器人的研究设计
2023-08-18 06:38郑美英宁旺云
机械设计与制造 2023年8期
郑美英,王 斌,宁旺云
(1.辽宁工程职业学院,辽宁铁岭 112008;2.宁波环球广电科技有限公司,浙江宁波 315000;3.云南农业大学机电工程学院,云南昆明 650201)
1 引言
消防人员在面对高温、浓烟等火灾现场时,存在难以用现有设备对现场进行详细侦察[1],导致无法及时地向后方决策人员报告受灾情况,同时消防人员穿戴的笨重防火隔热服,携带的各种专业工具也使其行动不便。
并且火灾现场存在着各种具有剧毒性、爆炸性的化学品,严重威胁着消防人员的自身生命安全[2]。因此,在未全面侦察获取足够的现场环境信息的情况下,贸然安排消防人员进入现场,往往会产生欲速而不达的后果[3]。
基于此,研究并设计一款能替代消防人员进入事故现场的能全面地完成侦察、环境信息获取等任务的消防机器人是迫在眉睫的[4]。根据机器人侦察获取的实时环境信息,后方决策人员可以全面地判断现场受灾情况,从而及时地指挥各项灭火救援工作,对挽回人民财产损失同时减少消防人员伤亡具有重大意义。
2 总体设计
2.1 总体方案设计
消防机器人分为上位机控制系统(简称上位机)与下位机控制系统(简称下位机)两部分,上位机由LabVIEW开发环境设计,下位机程序由Arduino IDE开发环境设计。消防机器人总体设计框图,如图1所示。
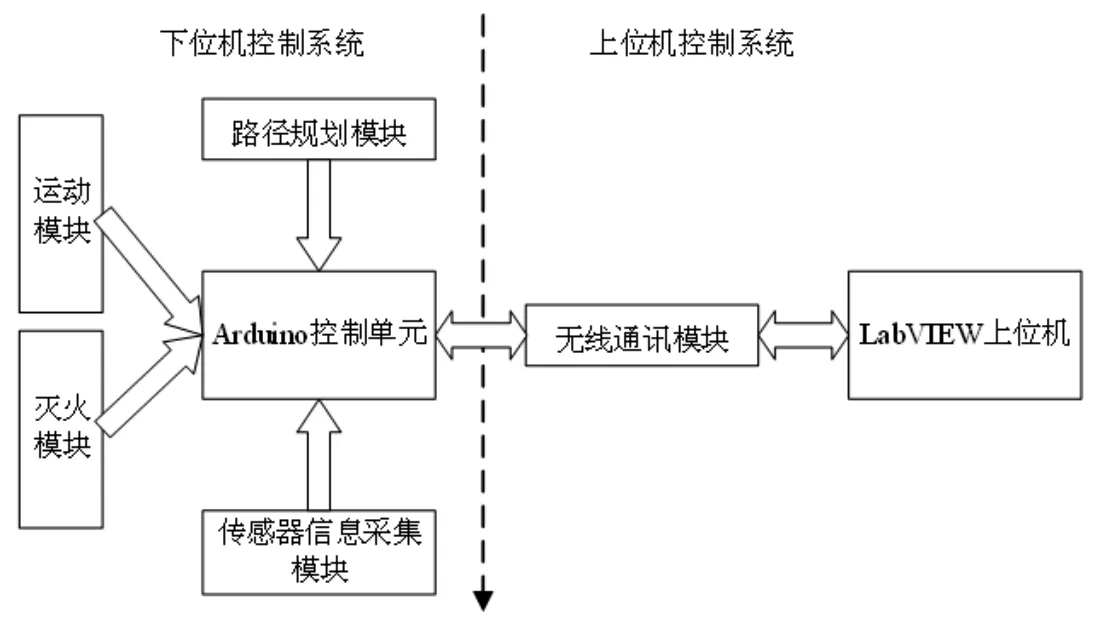
图1 消防机器人总体设计框图Fig.1 Overall Design Block Diagram of Fire Fighting Robot
2.2 功能模块设计
该机器人下位机控制系统由Arduino控制单元、运动模块、无线通讯模块、路径规划模块、传感器信息采集模块、灭火模块组成;上位机控制系统由运动控制模块、通讯模块、控制方式选择模块与环境信息显示模块组成,不同的模块实现不同的功能。消防侦查机器人功能模块,如图2所示。

图2 消防机器人功能模块图Fig.2 Function Module Diagram of Fire Fighting Robot
2.3 控制单元选型
控制单元需要协调下位机控制系统各模块正常工作,同时处理大量数据。
综合考虑,本机器人选用Arduino UNO 单片机为控制单元。Arduino UNO单片机是一基于ATmega328核心的微控制器[5],它由14个数字I/O口(其中6个为PWM 输出)、6个模拟I/O口、1个16MHz的陶瓷谐振器、1个USB接口、1个电源插孔、1个ICSP头和1 个复位按钮组成,因此能最大程度地满足系统各模块软硬件的要求。
3 下位机控制系统设计
3.1 下位机功能模块设计
下位机控制系统由Arduino控制单元、运动模块、无线通讯模块、路径规划模块、传感器信息采集模块、灭火模块组成。下位机通过接受上位机发送的指令对机器人运动状态、灭火功能进行控制,同时接受上位机发送的环境信息采集指令通过传感器信息采集模块将采集的环境参数通过无线通讯模块上传给上位机。下位机也可通过径规划模块实现路径规划功能。
3.2 硬件电路结构设计
机器人下位机控制系统各模块通过不同的引脚接口与Ar⁃duino UNO 单片机连接完成后组成了该消防机器人的硬件结构[6]。硬件结构的电路原理,如图3所示。
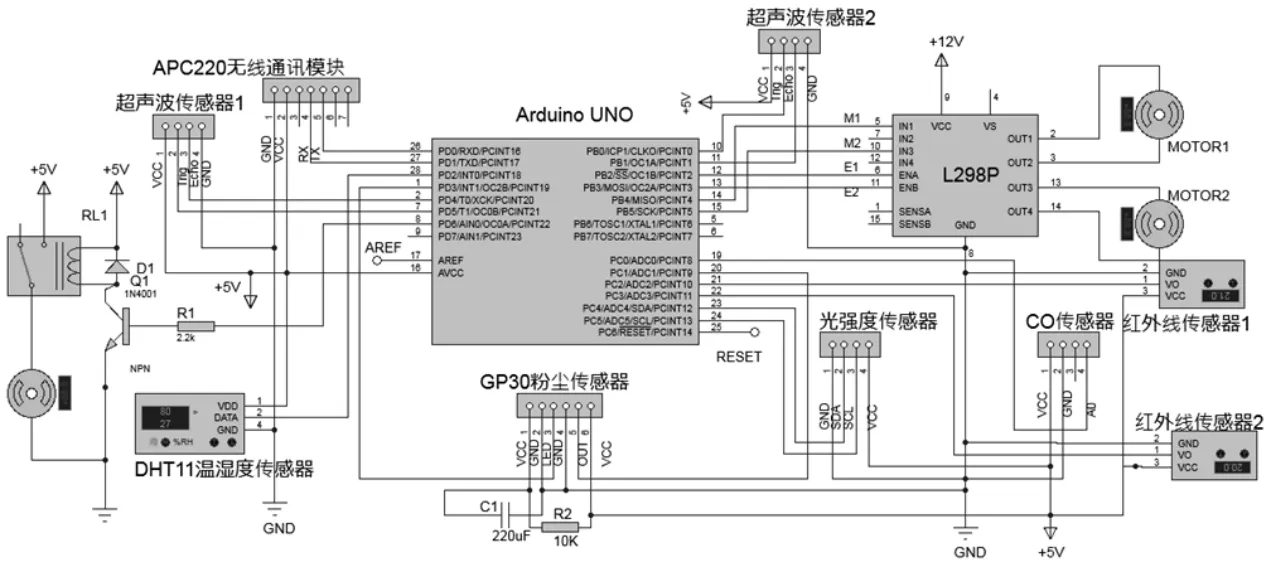
图3 消防机器人硬件结构电路原理图Fig.3 Schematic Diagram of Hardware Structure Circuit of Fire Fighting Robot
3.3 下位机程序设计
消防侦查机器人下位机控制单元选择Arduino UNO单片机,该单片机自带程序开发平台为Arduino IDE。
该机器人不仅可以实现自动控制也可以实现消防人员远程人工控制。下位机采用何种控制方式,由上位机通过串口发送不同指令决定,下位机收到串口指令,解析出其中的命令代码后执行相应的命令。为了更好地实现上下位机通信,制定指令以如下的通信协议形式发送即:
帧头+命令码+操作码
完整指令,如表1所示。
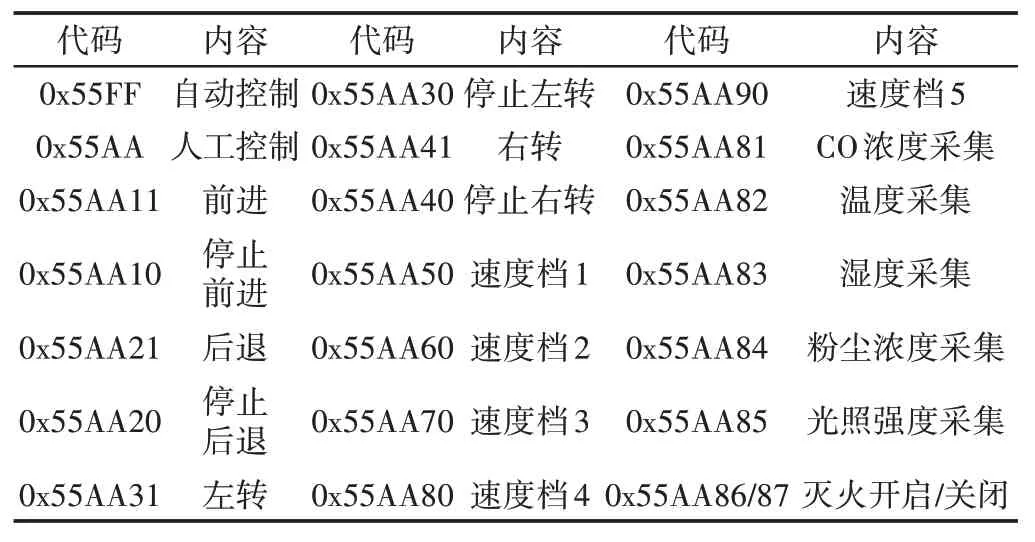
表1 指令表Tab.1 Instruction Table
当下位机控制单元收到上位机发送的“0x55AA”指令,表示人工控制模式开启;当收到“0x55FF”指令表示自动控制模式开启。
4 上位机控制系统设计
4.1 系统功能模块设计
上位机控制系统利用LabVIEW 2012 开发环境设计的消防机器人[7]。上位机控制系统前面板由运动控制模块、环境信息显示模块、通讯模块、控制方式选择模块与灭火控制模块组成,不同的模块实现不同的功能。
4.2 系统界面设计
上位机前面板即虚拟仪器界面,如图4所示。界面左侧的五个仪表盘分别用来显示事故现场温度、湿度、粉尘浓度、一氧化碳浓度和光照强度数值,一氧化碳浓度变化趋势由波形图显示。运动控制模块的四个布尔按钮分别控制机器人前进、后退、左转、右转动作。运动控制模块右侧的速度档位调节旋钮可对机器人进行5档调速。界面右下角的控制方式选项框包含人工模式与自动模式按钮,用于切换机器人控制方式。控制方式选项框下面的灭火按钮用于控制机器人开启灭火功能。另外串口号选项框用于选择上下位机通讯的串口号,状态机显示栏显示当前检测何种环境参数。

图4 上位机控制系统界面Fig.4 Upper Computer Control System Interface
4.3 上位机控制系统实现
消防侦查机器人上位机控制系统前面板对应的主程序框图,如图5所示。首先初始化串口号为COM5,波特率为9600b/s;然后,程序进入While 循环和事件结构,不断地检测是否有事件得到响应;事件结构有“模式切换”、“前进”、“后退”、“左转”、“右转”、“速度档位”、“超时”等事件。系统运行时,根据前面板不同按键的触发情况,程序通过串口向下位机Arduino 控制单元发出不同的指令,下位机解析出指令代码后执行相应的命令。上位机程序的启动和停止由最外层循环结构中写有“退出程序”的布尔开关控制。
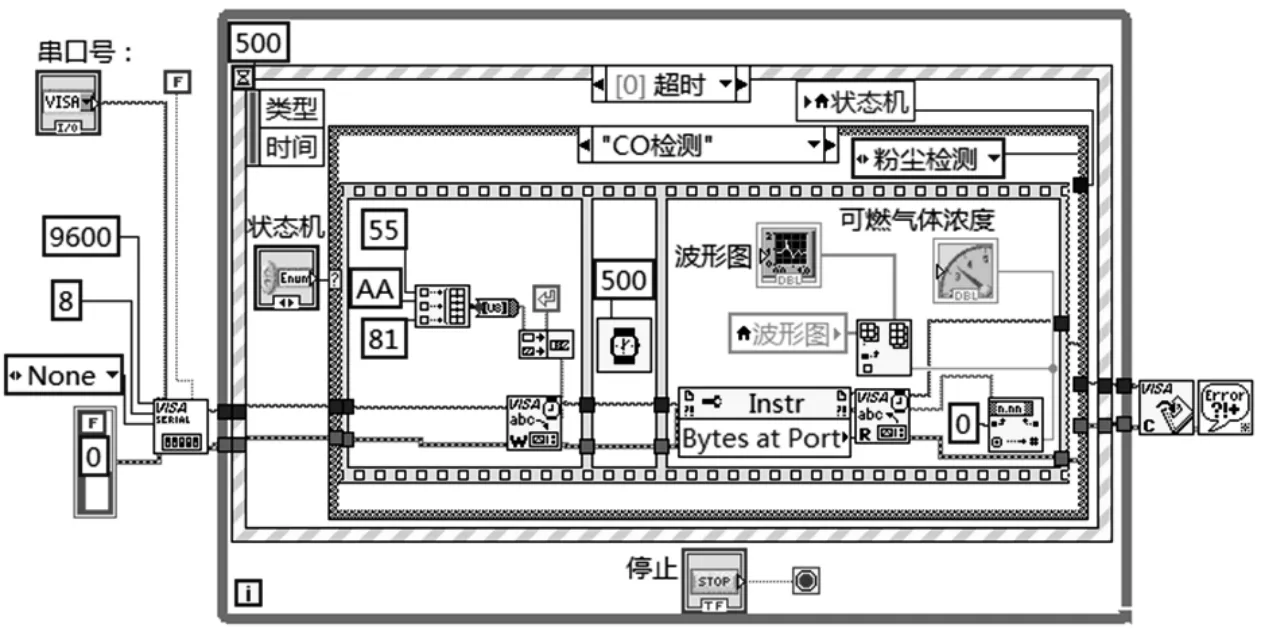
图5 消防机器人上位机控制系统主程序框图Fig.5 Main Program Block Diagram of Upper Computer Control System of Fire Fighting Robot
5 消防侦查机器人性能测试
5.1 消防侦查机器人运动性能测试
运动性能测试包括机器人直线前进、速度档位调节、爬坡、越障测试。
5.1.1 直线前进及速度档位调节测试
在平整的实验室地面上规划出区间s,控制机器人以速度档5(高速)前进,在不调整转向的情况下通过实验区间,根据公式v=s/t,经多次测试测得机器人的最高速度约为0.55m/s(设计要求不低于0.5m/s),满足性能指标要求。测试实验还表明机器人速度在(0~0.55)m/s之间可实现5档调节,且基本没有明显的“跑偏”现象出现。
5.1.2 爬坡测试
设计要求最大爬坡角度≥25°,最小速度≥0.1m/s。机器人在坡度为30°斜坡上的爬坡性能测试,通过测试可知,在坡面摩擦系数足够高的情况下,机器人可轻松爬上30°的斜坡,且前进速度最高为0.15m/s,因此爬坡能力满足性能指标要求,如图6所示。
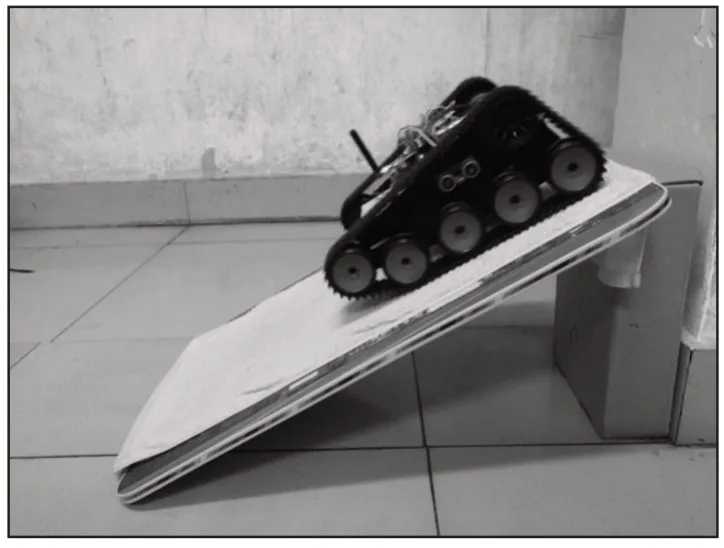
图6 消防机器人爬坡性能测试Fig.6 Climbing Performance Test of Fire Fighting Robot
5.1.3 越障测试
根据性能指标要求,机器人应具备跨越障碍物能力,且最大越障高度应≥5cm。在机器人前进方向放置高度为5.3cm的障碍物(障碍物宽度大于机器人最大宽度)。在上位机控制系统运动模块设置速度档位为5档,再点击前进按钮,消防机器人在高度5.3cm障碍物前的越障性能测试,测试结果表明该机器人可轻松越过该障碍物,因此越障能力满足性能指标要求,如图7所示。

图7 消防机器人越障性能测试Fig.7 Obstacle Crossing Performance Test of Fire Fighting Robot
5.2 消防机器人环境信息检测性能测试
打开消防机器人上位机控制系统,设置系统串口号为COM5,波特率为9600b/s后,在控制方式选择模块处点击人工模式选项,再点击系统运行按钮,系统运行500s后,得到的画面,如图8所示。由图可读出:当前环境温度为23℃,湿度为40%,粉尘浓度为0.02mg/m3,一氧化碳浓度数值为89,光照强度为41勒克斯(Lux),波形图显示了这段时间内一氧化碳浓度的变化曲线。该测试结果表明,所设计的消防机器人能检测一氧化碳浓度、粉尘浓度、光照强度、温度、湿度五种环境参数,并实现了上下位机实时数据无线传输。通过测试还发现:该机器人无线传输距离在无障碍物遮挡情况下最远可达300m,远大于所要求的130m 指标,因此完全满足设计要求。
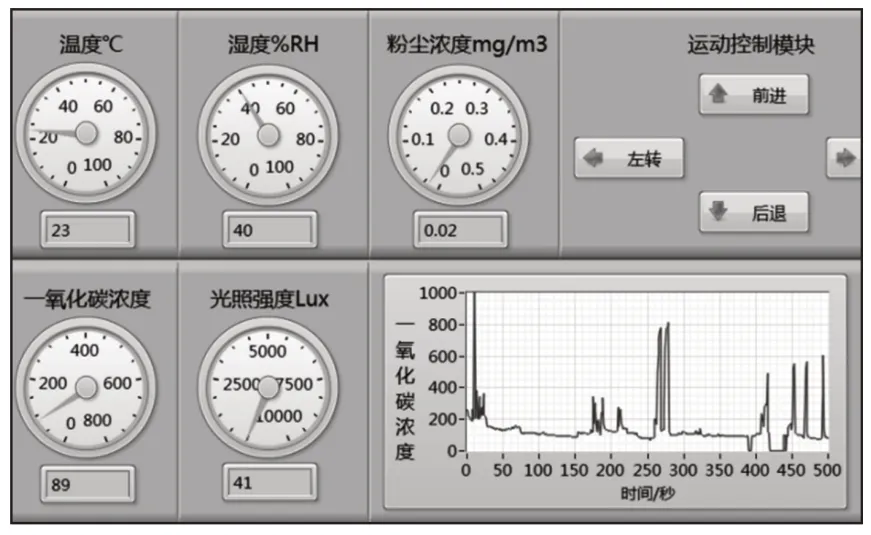
图8 消防机器人环境信息检测性能测试Fig.8 Environmental Information Detection Performance Test of Fire Fighting Robot
5.3 消防机器人路径规划性能测试
为了增加路径规划难度,将四类障碍物放置于实验室同一环境中[8],观察消防机器人能否自主得从起点出发无碰撞的避开所有类型障碍物到达终点。用纸盒等材料模拟四类障碍物垂直放置在消防机器人前进方向上,搭建好的障碍物环境,如图9所示。

图9 障碍物环境Fig.9 Obstacle Environment
将消防机器人置于起点处,在上位机控制方式选择模块处点击自动模式按钮,机器人开启路径规划功能。路径规划性能测试检测到A类型障碍物后迅速左转90°又向前运动一个安全距离再右转90°回到前进方向;消防机器人避开A类型障碍物后又检测到C 类型障碍物,迅速右转90°,向前运动一个安全距离再左转90°回到前进方向;顺利避开C类型障碍物后机器人又检测到D类型障碍物,机器人迅速后退同时检测到车体右侧距离大于安全距离,于是向后运动一个安全距离后右转90°,前进两个安全距离后再左转90°回到前进方向;避开D类型障碍物后机器人又检测到B类型障碍物,机器人迅速右转90°,向前运动一个安全距离再左转90°回到前进方向,最后到达终点。
上述路径规划性能测试过程表明消防机器人可同时检测到四种类型障碍物,并按照相应的路径规划策略成功的从起点出发无碰撞的避开所有类型障碍物到达终点。因此该机器人的路径规划性能满足设计要求。
6 结论
(1)对消防机器人进行了总体方案设计和功能模块设计,下位机控制单元选用Arduino UNO单片机。利用Arduino IDE开发平台对下位机系统的人工控制模式和自动控制模式程序进行了设计与开发。
(2)选择LabVIEW为上位机控制系统开发环境,然后对上位机控制系统进行了总体设计。最后,运用该开发环境对系统的通讯模块、控制方式选择模块、运动控制模块、环境信息显示模块和灭火控制模块进行了设计与开发。
(3)对消防机器人总体性能进行了测试。测试结果表明:机器人直线前进的最高速度约为0.55m/s,可实现五档调速;能以0.15m/s 的速度爬上30°的斜坡;可越过5.3cm 高的障碍;能检测一氧化碳浓度、粉尘浓度、光照强度、温度、湿度五种环境参数,并实现了实时无线数据传输,传输距离最远可达300m;能实现系统所设计的路径规划策略。因此所设计的消防机器人满足性能指标要求。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
学习月刊(2015年3期)2015-07-09
空间控制技术与应用(2015年2期)2015-06-05
