
井下鱼顶辨识系统设计及局部清洁仿真研究
2023-08-18 06:37曹国强尚晓峰王志坚
机械设计与制造 2023年8期
曹国强,李 昊,尚晓峰,王志坚
(沈阳航空航天大学机电工程学院,辽宁沈阳 110136)
1 引言
井下电视测井技术主要包括可见光井下电视、SWIR井下电视以及Visuray井下电视。文献[1]对可视化测井技术的发展进行了全面的分析,目前可见光井下电视主要局限于井液透明要求[2−5],而工作于红外波段的井下电视[6−8]以及采用X光散射的井下电视受到技术条件限制、生产成本和产能限制等诸多限制条件,还不具备大规模应用条件[9−12]。文献[13]对井下作业铅模打印技术进行了研究与分析,该方式只能判断鱼顶情况,不能全方位了解鱼顶状况,而且现有的井下电视成像技术精度低[14−15],在井下浑浊介质内成像不清晰,所以研制开发能够适应油污井的测井技术及其系统则具有非常实用的价值。
目前鱼顶冲洗现场作业通常利用油管或者连续油管泵送清水进行循环带压冲洗,而研究局部清洁可取代传统洗井过程,有效节省经济,且具有良好的环保性。
利用三维建模软件建立简化几何模型,并使用流体仿真软件进行流体分析并设置清洁液体的动力粘度、流速等参数将模拟结果进行对比[16−18]。根据模拟仿真结果,来分析所设计的清洁系统是否可行。
通过试验,对其可行性进行验证,为油田公司内部在井下实时监测技术方面久攻不破提供一种新方法。
2 系统设计
2.1 鱼顶辨识系统的工作原理
针对以上问题,研究设计了井下鱼顶辨识系统,包括补光模块、视频的采集及成像模块、清洁环境模块和清洁液获取模块,系统结构图及装置结构示意图,如图1所示。
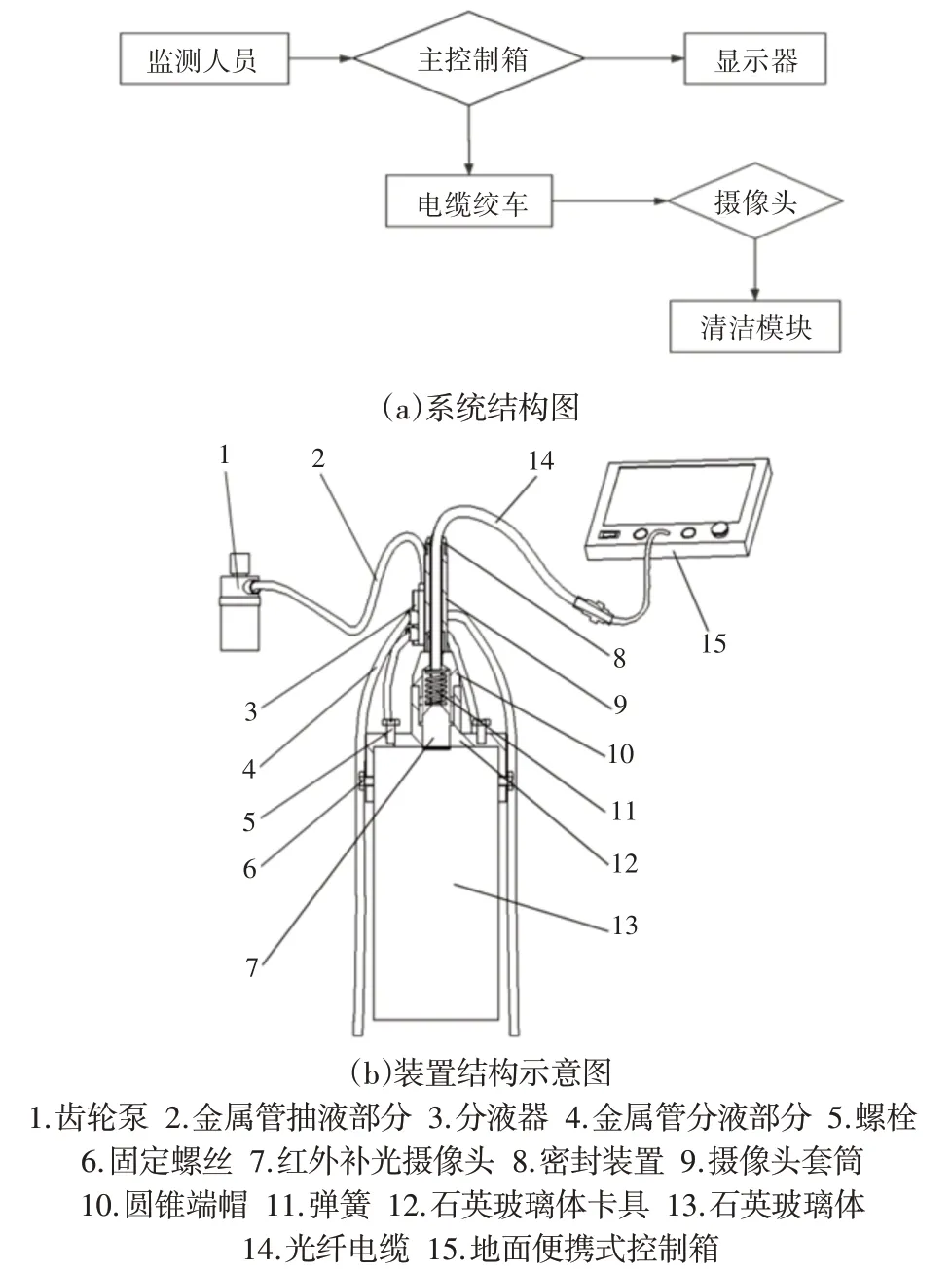
图1 井下鱼顶辨识系统Fig.1 Downhole Fish Head Identification System
设计的系统采用了可见光加近红外的方法手段来进行传感检测。红外补光摄像头与地面便携式控制箱由光纤电缆连接,通过便携式控制箱来显示井中所看到的一切景象。数据传输采用光纤电缆,控制系统采用触屏方式控制。
红外补光摄像头采用配备井下补光系统的可见光CCD作为传感器。井下鱼顶辨识使用石英玻璃体底部端面喷涂疏油层的方式,同时采用加保护膜方式进行二次保护,首先使用石英玻璃体排开井下污液环境,其次端面贴上保护膜及喷涂疏油层防止井下污液附着系统,到达鱼顶后通过电机拉动预制的细线,扯掉保护膜。鱼顶沉砂严重影响鱼顶辨识准确度,也影响打捞工具下入与连接。研究一种携带齿轮泵和液体包下入井内进行沉砂清理的方法,用泵将鱼顶沉砂抽起,循环带入沉砂暂存容器室储存(系统提到地面后排放),将泵出水进行过滤后,再注入鱼顶位置冲洗,一方面可创造局部清水化环境,另一方面可以冲起沉砂,便于清理,从而在镜头前形成可以清晰成像的环境,对整个井下情况进行探测。通过石英玻璃体端面刻度法进行鱼顶测量,如图2所示。
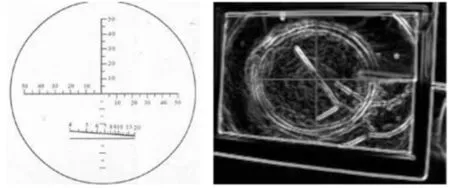
图2 石英玻璃体端面刻度法Fig.2 Quartz Vitreous End Face Calibration Method
2.2 井上及井下系统组成
设计的井上系统主要由触屏显示器、视频转换模块、USB传输接口和应急开关等部分组成,主要包括视频解码与转码、控制井下模块、实时图像显示、程序编辑和视频的输出与保存等功能。视频转换模块用于井下视频信号的解码与转码,可以硬解、软解同时实现,智能补偿图像,以保证图像色彩鲜亮,还可以实现彩色、黑白双工作模式,达到最佳的井下图像观测效果。
井上系统需要通过光纤电缆给井下系统供电并进行视频信号传输,井上系统组成,如图3(a)所示。井下系统主要由红外补光摄像头、光纤电缆、摄像头套筒、电机和齿轮泵等部分组成,主要包括利用主动红外原理进行井下勘测、对井下图像进行信号采集并编码为模拟视频(AV)格式以及局部清洁保证视野透明度的功能,井下系统组成,如图3(b)所示。其中,便携式控制箱及内部结构,如图4所示。

图3 系统的组成Fig.3 System Constitutes

图4 便携式控制箱及内部结构Fig.4 Portable Control Box and Internal Structure
3 流体仿真
针对基于可见光的油污井可视化测井技术的核心是在油污井液中创造出一个局部清洁化环境,从而实现对井局部进行相关测井作业的问题,可在鱼顶辨识系统的基础上增加一个局部清洁模块来便于观测井下落物。使用流体仿真软件进行局部清洁模块流体分析并设置清洁液体的动力粘度、流速等参数将模拟结果进行对比。根据模拟结果,分析所设计的清洁模块是否可行。
对此,在鱼顶辨识系统上方设置安装一个齿轮泵,将清洁液泵到井底处,排开观察位置的污水。局部清洁模块布管方式设有两种方法:一种是用四根直管对着玻璃体下方,排开玻璃体下方的污水使其清澈透明;另一种是用四根弯管对准玻璃体中心轴线,排挤开障碍物附近的污水,从而看清楚井底情况。石油井下局部清洁系统弯管布局结构截面图,如图5所示。
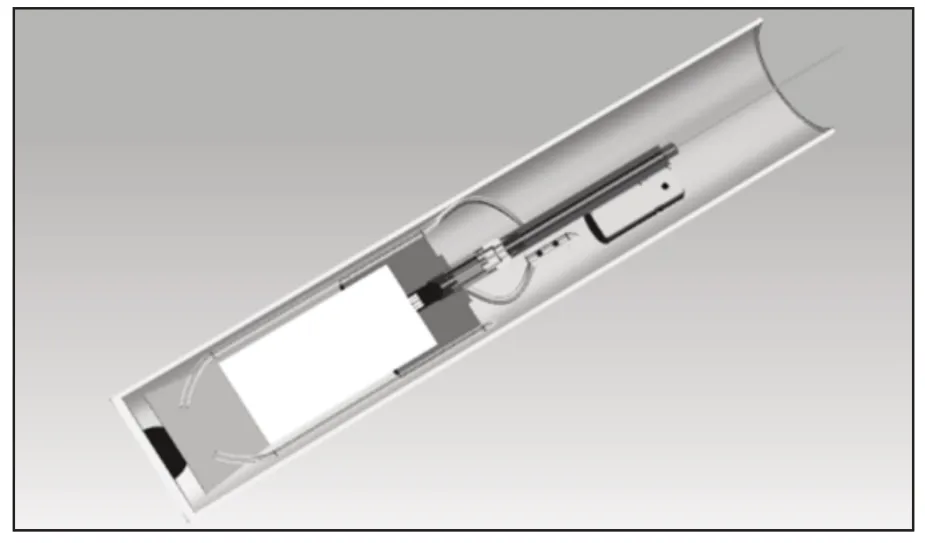
图5 石油井下局部清洁系统弯管布局结构截面图Fig.5 Sectional View of Elbow Pipe Layout of Oil Downhole Local Cleaning System
3.1 控制方程的建立
流体流动要受物理守恒定律的支配,对油污环境下鱼顶辨识系统的局部清洁模块进行流体仿真时也要满足三大守恒定律,分别为质量守恒定律、动量守恒定律和能量守恒定律,控制方程是这些守恒定律的数学描述。
由计算公式得知,该模型采用湍流模型,并选择标准k−e模型。其用到的流体流动的控制方程如下:
(1)连续性方程
式中:vx、vy、vz—x、y、z方向上的速度矢量;ρ—密度;x、y、z—总体笛卡尔坐标;t—时间。
(2)N−S动量方程
应力张量由下式给出:
式中:P—静压;τij—应力张量;gi、Fi—i方向上的重力体积力和外部体积力。
3.2 几何建模与网格划分
利用三维建模软件分别对两种方式进行建模,根据设计参数,以弯管建模为例完成建模。所需要研究的流体部分则是障碍物附近的部分,创建的三维模型,如图6所示。图中大圆部分是玻璃体以下的污水流动区域,上面四根为设置的弯管,在底部旋转出一个半球体当作障碍物(实体部分掏空),以便后期求解完成后观察障碍物附近污水被排开的情况。设置网格数量、形状、光滑程度等参数进行细致处理,划分时对弯管排污布局三维模型的进出口进行了加密处理,目的是为了提高网格的划分精度。模型中的单元总量是2009983、模型中的节点总量是565459、网格生成的质量为0.4,因此可以满足本模型的计算要求。弯管排污布局的非结构化网格,如图7所示。

图6 弯管排污布局的三维模型Fig.6 3D Model of Elbow Blowdown Layout
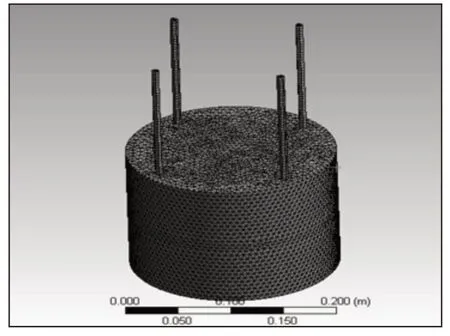
图7 弯管排污布局的非结构化网格Fig.7 Unstructured Mesh for Elbow Blowdown Layout
4 仿真分析
4.1 两种布管方式对比
对于两种布管方式,选择弯管排污方式更为适合,原因如下:
(1)排水量问题。直管方式需要将玻璃体下方的污水全部排开,而弯管方式只需要排开局部间隙处污水。
(2)实际操作时间问题。直管在实际操作时需要等待清洁液将玻璃体下方的污水排尽,而弯管只需要将障碍物间隙的污水排开即可。
4.2 改变流速模拟对比
根据对比选择第二种弯管的方式进行排污,四根弯管对准玻璃体中心轴线同时泵出清洁液体,排挤开障碍物间隙处的污水,通过改变流速对比模拟结果。现给定不同流速(1.2m/s、1.4m/s、1.6m/s、1.8m/s、2.0m/s)来模拟观察达到排污效果时间点的体积分数分布情况,如图8所示。并提取图中内容,如表1所示。

表1 不同流速污水排开时间表Tab.1 Sewage Disposal Schedule at Different Flow Rates
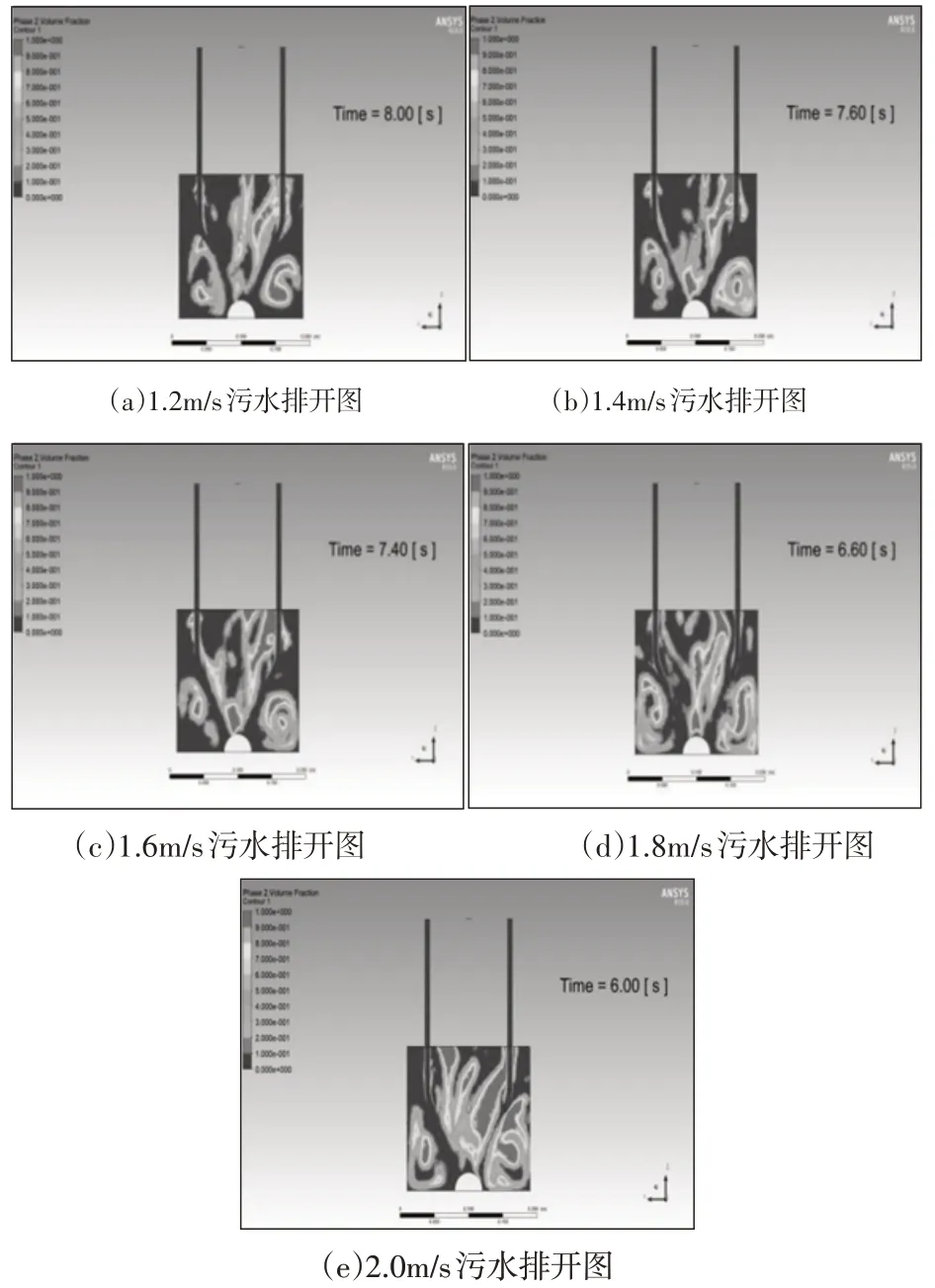
图8 不同流速污水排开图Fig.8 Diagram of Sewage Disposal at Different Flow Rates
从排污体积分数分布云图及表格中可看出,随着流速的增加,障碍物间隙污水被排开的时间越短,排污效果越好。
4.3 改变动力粘度模拟对比
通过改变动力粘度对比模拟结果,现以一定的流速(2m/s)改变流体的动力粘度参数(0.001Pa·s、0.002Pa·s、0.003Pa·s、0.004Pa·s、0.005Pa·s)来模拟观察达到排污效果时间点的体积分数分布情况,如图9所示。同样提取图中内容,如表2所示。
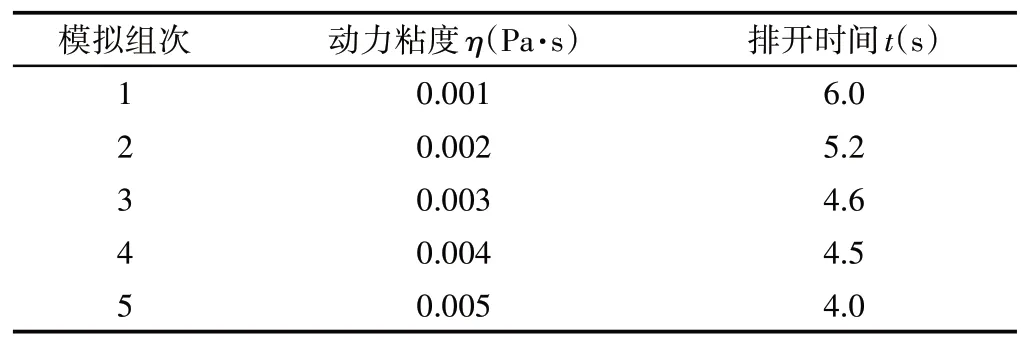
表2 不同动力粘度污水排开时间表Tab.2 Sewage Disposal Schedule for Different Dynamic Viscosities

图9 不同动力粘度污水排开图Fig.9 Diagram of Sewage Disposal with Different Dynamic Viscosities
从排污体积分数分布云图及表格中可看出,随着动力粘度的增加,障碍物间隙污水被排开的时间越短,排污效果越好。
4.4 相同时间不同动力粘度模拟对比
除以上的验证之外,还要观测动力的粘度为0.003Pa·s 与0.004Pa·s的液体分别在4.6s和4.8s时排污效果体积分数分布情况,如图10所示。对比以上效果图可以看出,在相同时间内,动力粘度越高,排污效果越好。
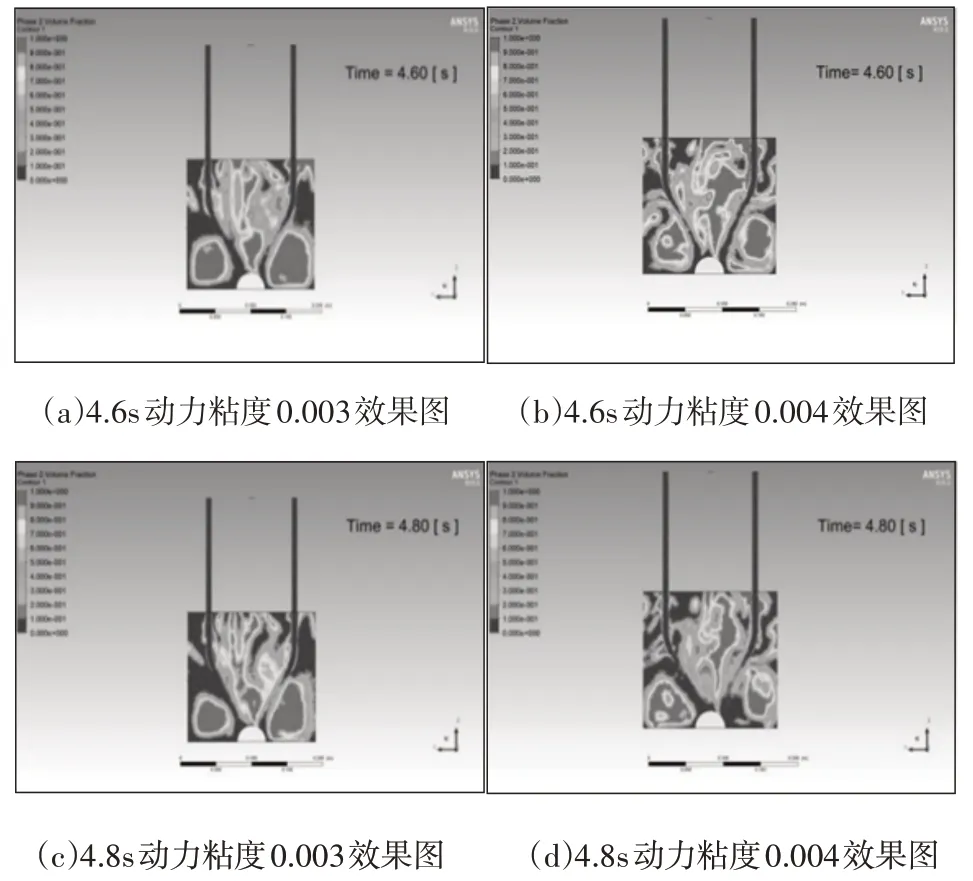
图10 相同时间不同动力粘度效果图Fig.10 Different Dynamic Viscosity Renderings at the Same Time
因此,在条件允许的范围内尽量增加清洁液泵出的流速和动力粘度,障碍物间隙处污水被排挤开的时间就会越短,且达到的排污效果越好,从而可以清晰地观测到落物的实际形状,完成对落物的检测。
4.5 不同流速和动力粘度特性分析
当流体的流速和动力粘度参数发生变化时,障碍物间隙处污水被排挤开的时间也跟随变化,从而得到不同的排尽时间点,流速、动力粘度与排尽时间的关系曲线,如图11所示。
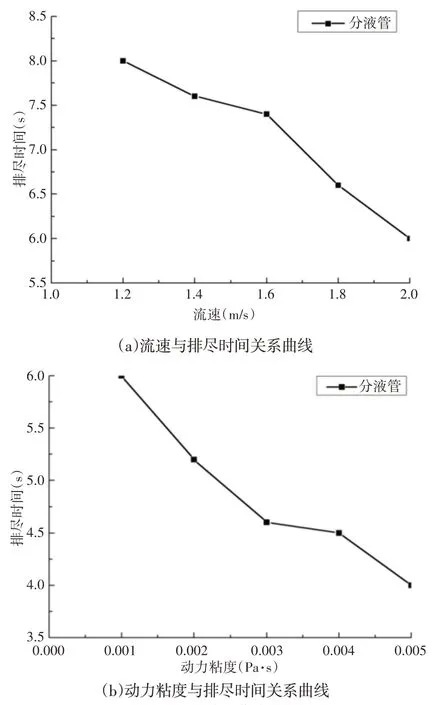
图11 关系曲线Fig.11 Relation Curve
从流速与排尽时间关系曲线中可以看出,在金属管外径8mm 不变的情况下,流速与排尽时间成反比。当流速在(1.4~1.6)m/s之间时,排尽时间下降的不明显,之后曲线大幅下降;从动力粘度与排尽时间关系曲线中可以看出,同样在金属管外径8mm的情况下,动力粘度与排尽时间也成反比。
当动力粘度在(0.003~0.004)cps之间时,排尽时间几乎无变化,随后曲线大幅下降。
5 室内试验
为了验证局部清洁模块的设计是否可行,按照第二种弯管布管方式加工制造试验系统,采用井下液体做为环境液,试验装置图及试验图像,如图12所示。将齿轮泵的调速器调到流速为2m/s,对鱼顶部位冲液(有机硅凝胶),清洗鱼顶。采用局部清洁化原理清洗鱼顶可有效地将污水排挤开,从而使鱼顶呈现清晰照片,说明此设计方法可行。
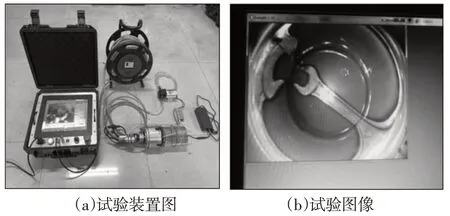
图12 试验验证Fig.12 Experimental Verification
6 结论
通过对油污环境下鱼顶辨识系统进行了流体仿真对比分析和试验验证,可得结论主要如下:
(1)选择弯管排污的方式更为合适,随着流速的增加,污水被排开的时间越短,排污效果越好;流速一定时,随着动力粘度的增加,污水被排开的时间越短,排污效果越好;在相同时间内,动力粘度越高,排污效果越好。
(2)本试验系统的下井装置使用不锈钢材料,做耐温耐压测试,可以在井下高温高压环境下作业。石英玻璃体本身具备耐高温、耐高压的特性,下井装置所有连接处均采用气动密封处理。
(3)数据传输采用光纤电缆,损耗几乎不随温度而变,且抗干扰能力强、保真率高,可以保证很好的视频传输。最终可以清晰地观测到落物的实际形状,并且完成对落物的检测。
(4)设备尺寸小型化,方便使用,能直接在油污环境下进行鱼顶检测,不需要洗井,可有效节省经济,且设备不会产生工业垃圾,对环境也不存在污染。
猜你喜欢
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
中国现代医生(2022年6期)2022-04-23
大众科学(2020年7期)2020-10-26
中医眼耳鼻喉杂志(2019年2期)2019-04-13
小天使·六年级语数英综合(2018年1期)2018-10-08
石油地球物理勘探(2017年2期)2017-11-23
中国中医眼科杂志(2015年1期)2015-12-28
山西水利(2014年9期)2014-04-06
现代检验医学杂志(2014年4期)2014-02-02
