
倒立摆控制系统优化与实时仿真
2023-08-06 16:47刘佳伟宋楠董文琦曹玉波
化工自动化及仪表 2023年4期
刘佳伟 宋楠 董文琦 曹玉波

摘 要 以一阶直线倒立摆为研究对象,基于牛顿第二运动定律,在惯性坐标系内分析和建立倒立摆状态空间表达式数学模型,设计并实现了基于经典PID控制器、状态反馈控制器和全维状态观测器的状态反馈控制器的倒立摆控制系统。通过MATLAB脚本语言实现了倒立摆实时仿真与控制系统,结果表明:优化后的全维状态观测器的状态反馈控制器运行效果更优,仿真结果与实际设备运行状态基本吻合。
关键词 一阶倒立摆 全维状态观测器 状态反饋控制器 PID控制器 脚本编程 实时仿真
中图分类号 TP273 文献标识码 A 文章编号 1000-3932(2023)04-0453-06
倒立摆系统作为一类经典的非最小相位系统具有机械构造简单、占用空间小及使用范围广等优点,非常适合在经费与科研条件都有限的实验室中进行控制实验[1]。其本身所具有的非线性、强耦合性及不稳定性[2]等工程中十分普遍的特性,使其具备着一般非线性不稳定系统中非常重要的动态性能[3]。在控制领域,许多经典和现代的控制方法以及复杂系统的物理模型都可以近似到倒立摆系统中[4],各种经典控制理论和新颖的控制策略也可通过倒立摆进行验证[5],并且控制效果可以通过摆杆和小车的状态直观地体现出来,其相关控制算法已应用于军工、航天及机器人等诸多领域[6,7]。因此,对倒立摆系统的实现与优化不仅能将理论具体应用到实际设备,同时也为探索、论证新理论的正确与否提供实验平台和实践基础。
1 倒立摆机理模型
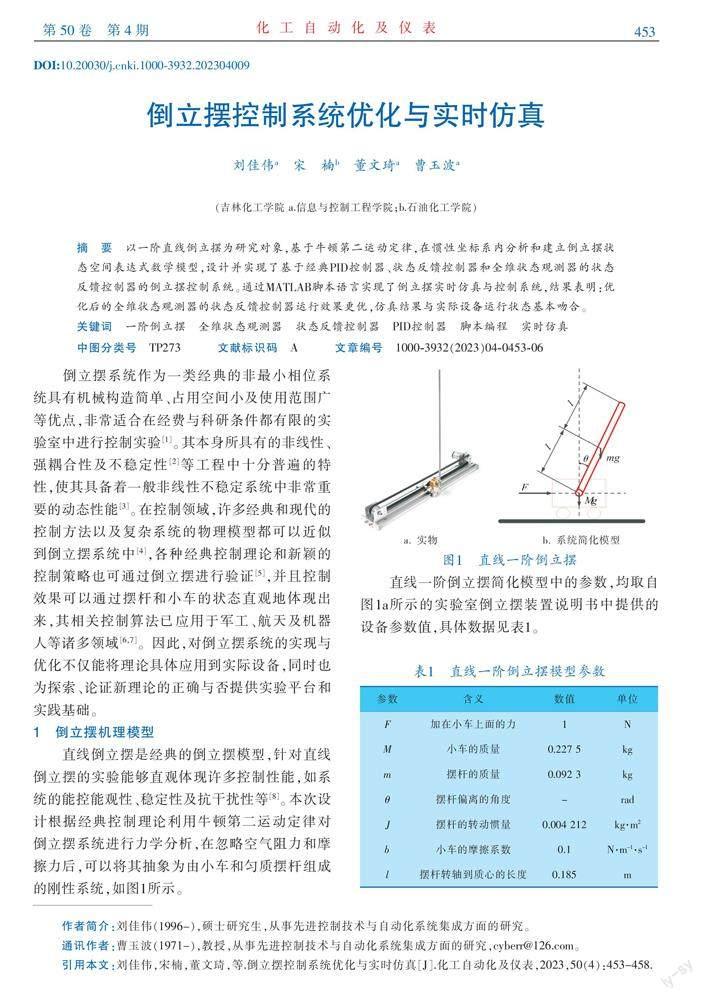
直线倒立摆是经典的倒立摆模型,针对直线倒立摆的实验能够直观体现许多控制性能,如系统的能控能观性、稳定性及抗干扰性等[8]。本次设计根据经典控制理论利用牛顿第二运动定律对倒立摆系统进行力学分析,在忽略空气阻力和摩擦力后,可以将其抽象为由小车和匀质摆杆组成的刚性系统,如图1所示。
直线一阶倒立摆简化模型中的参数,均取自图1a所示的实验室倒立摆装置说明书中提供的设备参数值,具体数据见表1。
2 系统控制方案
2.1 经典PID控制
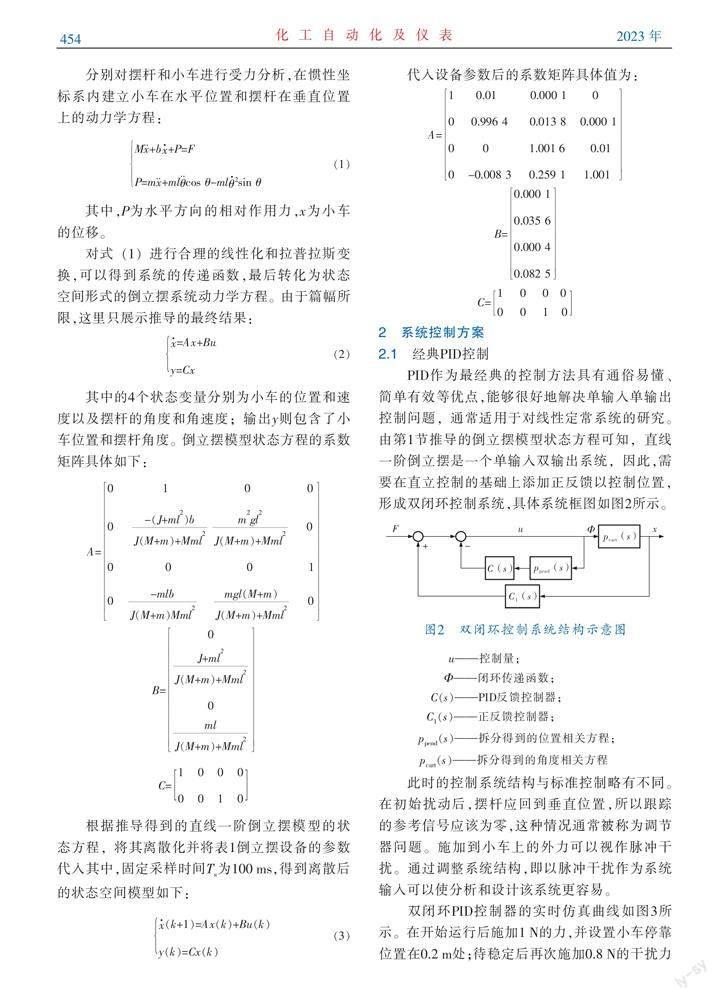
PID作为最经典的控制方法具有通俗易懂、简单有效等优点,能够很好地解决单输入单输出控制问题,通常适用于对线性定常系统的研究。由第1节推导的倒立摆模型状态方程可知,直线一阶倒立摆是一个单输入双输出系统,因此,需要在直立控制的基础上添加正反馈以控制位置,形成双闭环控制系统,具体系统框图如图2所示。
2.2 状态反馈控制器控制
通过状态空间法,把高阶常微分方程转化为一阶微分方程组描述系统动态过程,这样可以解决多输入多输出问题,同时适用于研究线性定常系统和非线性时变系统[9]。状态反馈控制系统的原理如图4所示,其中输入r为小车位置的步进命令,K为控制增益的矩阵。与经典控制不同的是,状态反馈控制器是反馈系统的所有状态,而不是使用系统的输出来反馈。
2.3 基于全维状态观测器的状态反馈控制
在状态反馈控制器的设计中,假设了状态变量都可测量,然而在实际控制过程中并不是所有的状态变量都是可测量,并且状态反馈控制只能满足瞬态要求,没有考虑稳态误差[11]。为了解决以上问题,必须利用可以观测的量(输入、输出量)通过一个模型重新构造系统状态以对所有状态变量进行估计,该模型即状态观测器[12]。带有全维状态观测器的状态反馈控制的原理如图6所示,其中■、■分别为x、y的估计值。
3 倒立摆实时仿真实验平台设计
本次设计选用MATLAB/GUI进行倒立摆仿真实验平台的开发[13]。利用GUI中的用户图形界面工具,在MATLAB/GUI自动生成的.m文件中编写倒立摆模型程序、控制器程序和实时仿真程序。设计了模型参数设置、控制算法选择及参数整定、实时仿真曲线及图形动态显示等界面,使用户能够在仿真之前自由填写模型参数,在仿真过程中直观地看到倒立摆的控制效果,并且仿真结束后可再次施加轻微扰动,观察控制效果,使仿真过程更加贴合实际控制效果。
倒立摆仿真实验平台的实时仿真效果如图8所示,左侧为倒立摆模型参数设计界面,用户可以设置不同倒立摆的参数,系统会自动计算参数并生成倒立摆模型;在仿真设置中,用户可以选择不同的控制算法,包括经典PID控制算法、LQR控制算法(状态反馈控制器)和基于全维状态观测-状态反馈控制器算法,并填写相应的控制参数,系统根据用户设置的参数反馈相应的增益矩阵数值。中间和右侧分别为实时仿真曲线显示界面和模型动态显示界面,且模型动态显示为运行结果放大10倍的效果,用户可以同时观察仿真曲线和动态模型,更加直观地体会控制效果。可以看到,仿真曲线与动态模型是实时随动的,且反馈的增益矩阵与理论计算结果相同,证明了所设计控制器与控制系统的合理性和有效性。
4 结束语
在惯性坐标系内建立了直线一阶倒立摆的数学模型,以该模型方程为被控对象,设计了经典PID控制器、状态反馈控制器和全维状态观测-状态反馈控制器。然后用MATLAB/GUI设计了倒立摆实时仿真实验平台,编写了控制器程序、实时仿真程序及模型动态显示程序等。最后,利用实验室倒立摆设备的参数,分别使用3款控制器对倒立摆系统进行实时仿真实验。仿真结果表明:3款控制器都可以完成仿真控制实验,且基于全维状态观测器的状态反馈控制器的控制效果最优,证明了优化的合理性与有效性。
参 考 文 献
[1] 于蕾,方蒽,纪雯.一阶倒立摆系统建模与仿真研究[J].电子世界,2021(15):25-26.
[2] 王广文,徐芷薇,王丽.倒立摆自适应模糊控制系统研究[J].数字技术与应用,2021,39(7):4-6.
[3] 王雯,崔建峰,武燕.倒立摆张量积分散LQR稳定控制[J].控制工程,2020,27(3):476-480.
[4] 伍曉丽,万文略.基于无迹卡尔曼滤波的旋转倒立摆LQR控制[J].测控技术,2017,36(4):93-97.
[5] OGUNTOSIN V,ORUMA S O,AKINDELE A,et al. Control Design of an Inverted Pendulum on a Moving Base Using State Feedback[J].IOP Conference Series:Materials Science and Engineering,2021,1107(1):012064.
[6] KAREEM A F A,ALI A A H.Robust Stability Control of Inverted Pendulum Model for Bipedal Walking Robot[J].Al-Nahrain Journal for Engineering Scien-ces,2020,23(1):81-88.
[7] YANG G H,LI H H.Design and Application of Modern Control Theory Simulation Experiment Platform Based on MATLAB[J].Open Access Library Journal,2020,7(12):1-12.
[8] 韩治国,许锦,陈能祥.基于Kalman滤波与滑模控制的倒立摆控制器设计[J].实验室研究与探索,2021,40(6):101-105.
[9] 韩治国,陈能祥,许锦,等.基于BP神经网络的倒立摆智能控制研究[J].实验技术与管理,2021,38(6):101-106.
[10] 王鹏飞,杜忠华,牛坤,等.基于改进粒子群算法的倒立摆LQR优化控制[J].计算机仿真,2021,38(2):220-224;272.
[11] 王俊伟,于新海,温荣,等.倒立摆状态观测器的输出反馈控制器研究[J].机床与液压,2021,49(8):152-155.
[12] 张新荣,马杰,张才斗,等.基于MATLAB倒立摆可视化建模仿真与控制[J].计算机工程与设计,2018,39(10):3214-3219.
[13] 易磊,张蓉,邓春花,等.基于直线倒立摆的自控实验平台研究[J].实验技术与管理,2021,38(1):99-104.
(收稿日期:2022-11-25,修回日期:2023-05-14)
Optimization and Real-time Simulation of Inverted
Pendulum Control System
LIU Jia-weia, SONG Nanb, DONG Wen-qia, CAO Yu-boa
(a. College of Information and Control Engineering; b. College of Petrochemical Engineering,
Jilin Institute of Chemical Technology)
Abstract Through taking a linear first-order inverted pendulum as the object of study and based on Newtons second law of motion, the mathematical model of space expression for the inverted pendulum was established and analyzed in inertial coordinate system. On this basis, the simulation of inverted pendulum control system based on classical PID controller, state feedback controller and the state feedback controller of full-dimensional state observer was designed and implemented, including having MATLTB script language based to design a real-time simulation experiment platform for the inverted pendulum. Operating result indicates that, the state feedback controller of the optimized full-dimensional state observer has better control effect. The simulation results are in good agreement with the actual equipment running state
Key words first-order inverted pendulum, full-dimensional state observer, state feedback controller, PID controller, scripting, real-time simulation
