机动条件下舰炮对目标的命中概率影响分析∗
2023-08-04 05:45冯昌林
舰船电子工程 2023年4期
冯昌林 陈 锋
(中国人民解放军92942部队 北京 100161)
1 引言
常规火控解算过程中,通常将舰艇机动过程简化为匀速直线运动以简化计算,而实际作战过程中,舰艇遭遇敌方目标并对其进行打击时,会保持机动以减小自身被打击风险[1]。实际上,舰艇机动并非单纯的匀速直线运动,因此,当舰艇进行机动间射击时,传统火控解算方法会存在较大误差,从而直接影响舰炮对目标的射击精度[2~3]。为贴近实战以提升舰炮射击效力,需进行机动条件下舰炮武器火控解算分析,以在保证己方舰艇生存率的同时精确打击敌方目标[4]。舰炮武器系统工作流程为探测系统发现并锁定目标,获取目标当前相对于舰艇的距离、方位角等参数,火控系统根据目标运动参数计算出射击诸元,随动系统根据火控系统给出的射击诸元进行瞄准并发射[5~6]。舰炮在舰艇机动间射击时,从火控系统解算出射击诸元到舰炮发射这个过程有短暂时间间隔,也就是说,舰艇机动条件下,舰炮发射时的真实初始位置和方位角信息与火控系统解算输入的初始位置和方位角信息存在一定偏差。此时,从舰艇角度看将存在两个问题:其一是目标在进行机动,针对此问题,可采用交互式多模型算法(IMM)[7~8]对目标进行跟踪处理以获取目标运动参数;其二是目标的观测量误差突然增大,这是因为传统火控系统仍将舰艇视为静止或直线运动,舰艇机动产生的误差需进行补偿,以减小武器系统对目标的观测误差。
2 舰艇机动产生的观测误差分析
目前对机动目标打击问题的研究重点为采用何种运动模型对机动目标进行轨迹预测,但对观测误差的修正与补偿问题欠缺考虑[9。以初始时刻舰炮炮口为原点建立标准坐标系,则对海面上的机动目标t进行观测产生的距离误差方差为σρ2,对应的距离误差为vρ(k);方位角误差方差为σθ2,对应的方位角误差为vθ(k)。假设k时刻舰艇处于机动状态,则舰炮在k时刻的真实位置信息为:、;探测系统传输给火控系统的自身位置信息为X1(k)、θ1(k);目标的观测数据为
其中,X表示位置参数,θ表示方位角参数。
舰艇机动条件下舰炮对目标进行射击时,从火控解出射击诸元到舰炮发射过程延时较短,在较短延时下,舰艇位置变化较小,因而对射击精度的影响很小,但产生的角度误差则会对射击精度产生较大[10]。令测距误差仍为vρ(k),而角度误差则表示为
角度误差方差为
其中:
假设由舰炮武器系统自身性能决定的量测噪声协方差为R0=diag([σρ2,σθ2]),则考虑舰艇机动产生的观测误差后,舰炮武器系统的虚拟观测噪声协方差为
3 基于误差修正的跟踪算法
交互式多模型算法无需检测目标的机动过程,跟踪滤波采用马尔科夫链实现转换[11~13],使得模型在机动与非机动模型之间相互切换,具有全面自适应能力,其原理如图1所示。
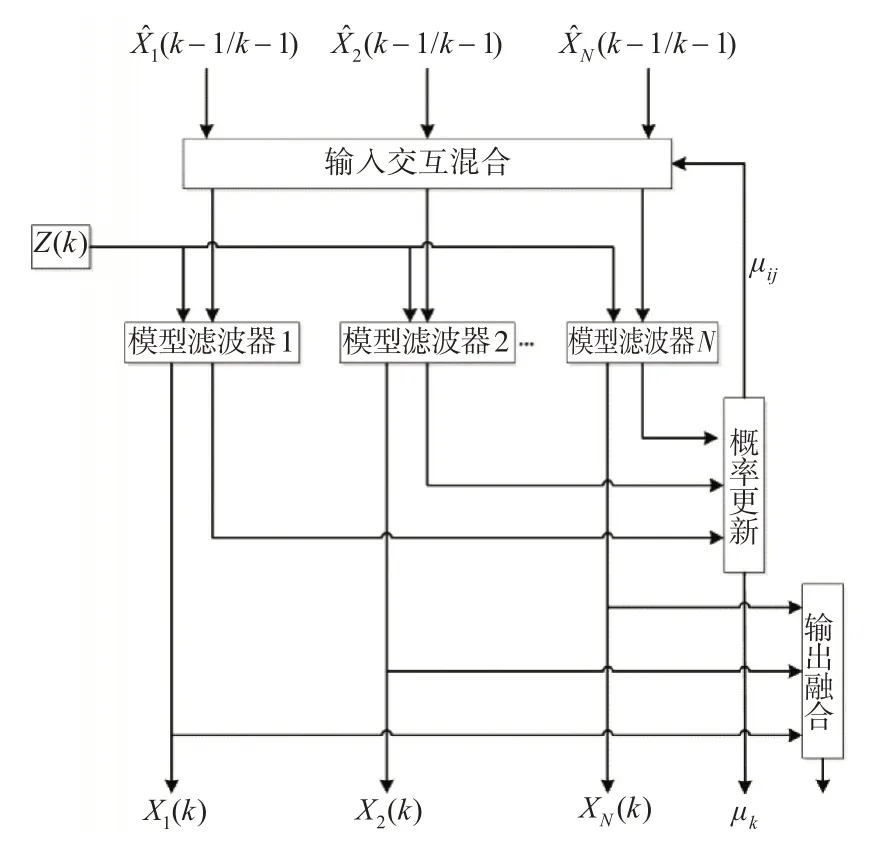
图1 IMM算法原理图
图1 中,N 个模型及其滤波器共同组成IMM 的模型集。设机动目标模型集中的模型数为r,记为m1m1…mr,建立滤波模型,系统状态方程为
观测方程为
其中,F(k)为状态转移矩阵;X(k)为k时刻的目标状态矢量,H(k)为观测矩阵,ω(k)为过程噪声,v(k)测量噪声,对应的协方差矩阵为,二者皆为零均值白噪声[14]。
在一个采样周期[Mk,Mk-1] 内,多模型算法的混合协方差可表示为
对输出信息进行融合,则总体协方差可表示为
以舰炮所在位置为坐标原点建立坐标系,假设舰艇前25s 进行角速度为10°/s 的转弯机动,其后35s 进行速度为30 节的匀速直线运动,最后25s 进行角速度为-10°/s 的转弯机动;目标初始位置为(3000m,4000m),目标前35s 进行角速度为7°/s 的转弯机动,其后35s 进行角速度为-10°/s 的转弯机动,最后15s进行速度为30节的匀速直线运动。
设置参数为采样时间间隔为1s,马尔科夫转移概率矩阵为P=[0.7,0.3;0.3,0.7] 距离测量误差为15m,方位角误差为2.5rad,当舰艇机动时距离测量误差不变,测角误差增大,舰艇与目标真实运动轨迹如图2所示,目标真实轨迹与测量值如图3所示。
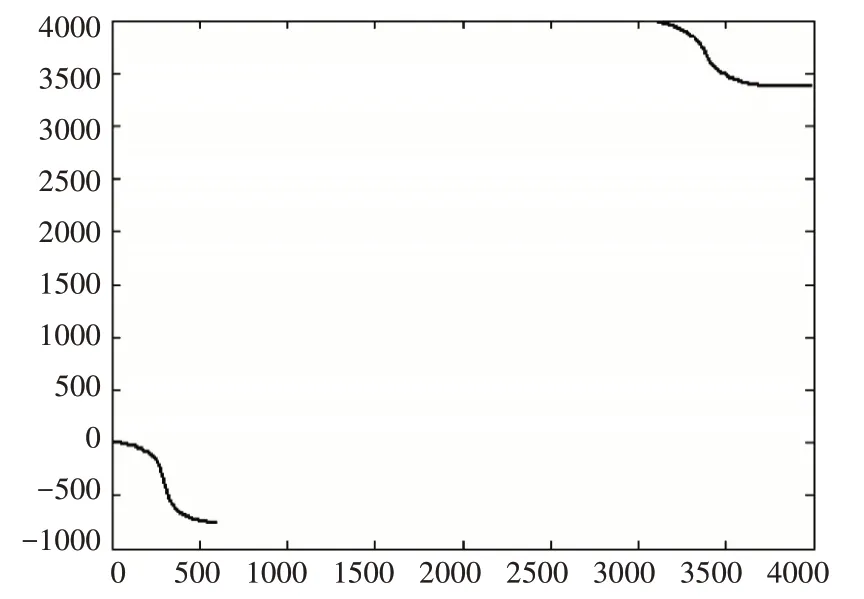
图2 舰艇与目标真实运动轨迹
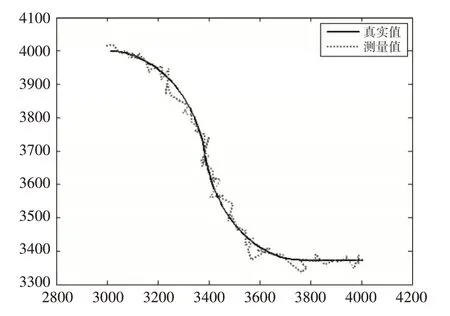
图3 目标真实轨迹与测量值
采用修正后的测量噪声协方差矩阵进行跟踪滤波效果如图4、5所示。
图4 修正前后滤波误差对比
舰艇机动过程中,目标观测位置误差及角度误差均方根平均值如表1所示。
表1 位置误差及角度误差均方根均值
由上述仿真结果可知,采用改进后的观测噪声协方差矩阵后,目标跟踪滤波误差显著减小。由图4 和图5 可看出,当目标及舰艇机动方式发生变化时,滤波误差会显著增大,这种误差直接体现在对目标的观测角度误差,对舰炮射击效力影响较大。由表1 可知,修正后目标观测位置误差和角度误差均方差均值相较于修正前要小得多,可以看出,本修正方法可有效减少舰艇机动时对目标的观测误差,从而有效提升舰炮对目标的射击效力。
图5 修正前后滤波误差标准差对比
4 目标观测算法修正后舰炮对目标命中概率分析
为研究目标测角误差修正后舰炮对目标射击效力的影响,先对修正前后舰炮对机动目标命中概率进行仿真分析,仿真条件为:舰艇运动速度为10节,采用130mm 舰炮对目标进行打击,弹丸初速为860m/s,目标运动速度为30 节,运动方式为转弯运动及匀速直线运动,舰艇投影面积为120m*15m*8m,假设每一次舰艇及目标发生机动时对舰炮对目标进行射击,则目标参数如表2所示。
表2 舰炮对机动目标单发命中概率
其中,转弯运动1 为舰艇顺时针圆周运动,速度为10°/s;转弯运动2 为目标顺时针圆周运动,速度为7°/s;转弯运动3为目标逆时针圆周运动,速度为7°/s;转弯运动4为舰艇逆时针圆周运动,速度为10°/s;直线运动1 为目标匀速直线运动,速度为30节;直线运动2为舰艇匀速直线运动,速度为30节。
由表2 可知,修正后舰艇及目标的相对方位角角修正前平均相差1.926%,修正后舰炮对目标的单发命中概率相较于修正前平均提高19.8%,由此可见,采用测量误差修正方案可有效提升机动条件下舰炮对目标的命中概率。
5 结语
由上述仿真分析可知:
1)误差修正基于误差产生原因,结合武器系统工作原理分析可知,当舰炮在舰艇机动间进行射击时,由于从火控系统解算出射击诸元到舰炮发射这个过程有短暂延时,舰艇机动条件下舰炮发射时的真实位置和方位角信息与火控系统解算时输入的位置和方位角信息存在一定偏差,由于延时短暂,舰艇位置变化并不明显,对舰炮射击效力影响不大,而因转向产生的角度误差则会对射击精度产生较大,因此产生的目标观测角度误差需进行修正。
2)由修正前后目标跟踪产生的误差及其协方差仿真分析可知,采用修正方案对目标观测角误差进行修正后,跟踪误差及其协方差有了很显著的下降,且舰炮对目标的命中概率也有了较大提升,这证明对目标的观测角度误差修正对于提升武器系统射击效力具有重要意义。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军事文摘(2021年16期)2021-11-05
军事文摘·科学少年(2021年8期)2021-09-10
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
装备制造技术(2019年12期)2019-12-25
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
河南科技(2015年18期)2015-11-25