一种葡萄苗木嫁接机器人的结构设计*
2023-08-02 23:44赵彦浩赵栋杰杨佳涵王建凯
南方农机 2023年16期
赵彦浩,赵栋杰,杨佳涵,王建凯
(聊城大学机械与汽车工程学院,山东 聊城 252000)
0 引言
目前,国内葡萄硬枝嫁接主要采用传统的人工嫁接作业方式,该方式存在诸多缺点,对葡萄嫁接行业规模化生产造成了极大的阻碍,亟需研制合适的苗木嫁接机器人[1]。嫁接机器人相较于传统的人工嫁接,具有嫁接效率高、嫁接质量易保证、易满足育苗的工厂化生产需要等优势[2]。因此,研究开发一种苗木嫁接机器人具有重大意义。
目前国内外有关苗木嫁接装备的研究较少,可查阅到的研究资料主要集中于葡萄、毛桃、苹果等常见苗木的切削机构及嫁接装置,多数处于实验室阶段。法国某公司采用Ω 嫁接方式研制了葡萄自动化嫁接机,使用室内流水线方式进行嫁接任务,流水线操作相比于人机操作更容易保证葡萄嫁接苗的成活率;西班牙某公司研制了半自动葡萄嫁接装置,通过劳动工人将砧木、穗木放在切削工位,可完成砧木和穗木的切削、接合操作[3-5]。国内方面,山东烟台农业科学院姜秀美团队[6]以葡萄为试验对象研制了PJJ-50半自动嫁接机,该嫁接机采用Ω型嫁接方式,嫁接成活率在85%以上。湖南农业大学罗军团队[7-8]以葡萄苗茎秆作为试验对象,研制了Plug-in 的葡萄嫁接机,成活率较高。中国农业大学赵燕平团队[9-10]研制了杨树苗自动嫁接机样机,并对其进行了切削试验,成功率可达96.5%。综上所述,目前国内外苗木嫁接装备大多只能完成切削与接合功能,但是无法实现自动匹配等功能。因此,为解决上述问题,本文提出了一种具有自动匹配、切削、接合、蜡封等功能的苗木嫁接装置。
1 总体设计方案
该嫁接机器人主要包括砧穗匹配系统、切削接合装置、蜡封收集装置。总体结构如图1 所示。
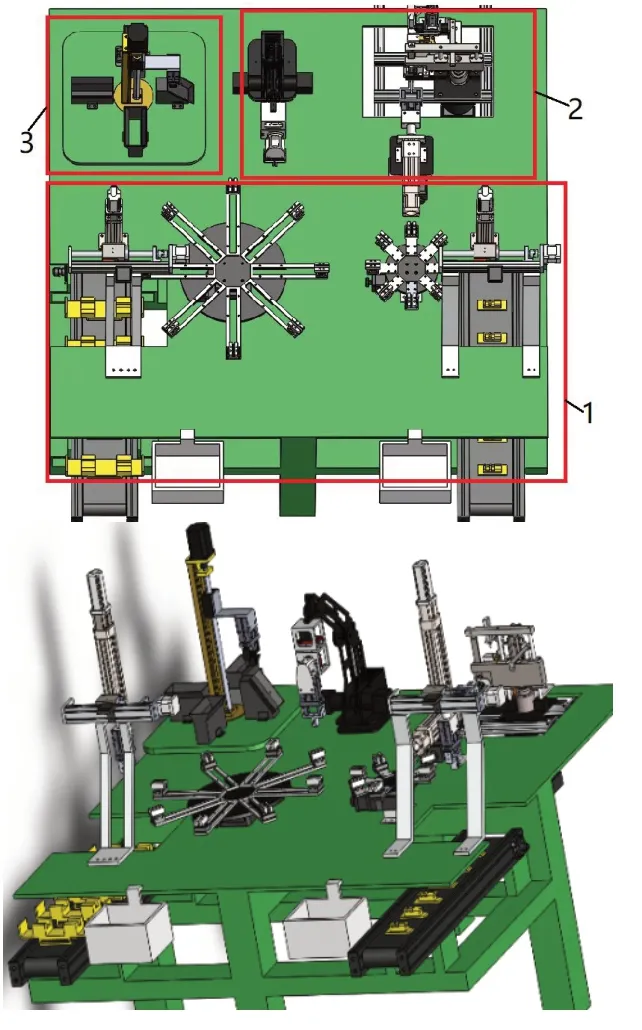
图1 总体结构示意图
其中,砧穗匹配系统由砧木供苗装置和穗木供苗装置组成,用于完成砧木、穗木的特征信息的采集和两者之间的自动匹配;切削接合装置包括切削接合机构、嫁接机械手、穗木旋转机械手,其中,切削接合机构由切削模块、夹持模块和排苗模块组成,可用于对匹配好的砧木与穗木进行准确切削和快速接合;蜡封收集装置主要由蜡封机械手、蜡封装置、储苗台、冷却箱和收集箱组成,用于嫁接苗的蜡封、降温、收集。
2 关键零部件的设计
2.1 砧穗匹配系统
砧穗匹配系统包括砧木供苗装置和穗木供苗装置,具体如图2所示。
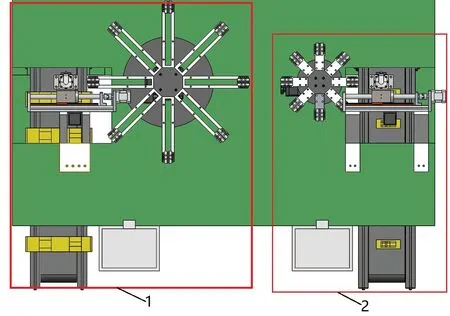
图2 砧穗匹配系统
砧木供苗装置由取苗机械手、砧木转盘、电动旋转台、砧木支座、砧木图像采集处理系统、输送机、砧木座等组成,其中,砧木座共6 个,等间隔固定在输送机上,输送机位于取苗机械手的下方。该装置可使用输送机输送待检测的砧木,再通过图像采集处理系统完成砧木粗度、弯曲度、表面破损情况的检测,并判断取苗机械手的抓取位置,然后由取苗机械手夹取、转移符合条件的砧木,放置于砧木转盘的砧木支座上,为后续的切削接合操作做好准备。
穗木供苗装置由取苗机械手、穗木转盘、电动旋转台、穗木支座、穗木图像采集处理系统、输送机、穗木座等组成,其中,穗木座共6 个,等间隔固定在输送机上。该装置可实现的功能与砧木供苗装置相同,先由输送机输送待检测的穗木,再由图像采集处理系统完成穗木粗度、弯曲度、表面破损情况的检测,并判断抓取位置,最后由取苗机械手夹取、转移符合条件的穗木至穗木转盘的穗木支座上,用于后续的切削接合。
2.2 切削接合装置
切削接合装置包括切削接合机构、嫁接机械手、穗木旋转机械手,如图3所示。

图3 切削接合装置
其中,切削接合机构包括切削装置、夹持装置、排苗装置,如图4 所示。切削装置由移动座、固定座、砧木后支座、穗木支座、主气缸等组成,可实现砧木与穗木的准确切削和快速接合;夹持装置包括砧穗夹具体、砧穗夹紧气缸、砧木压块、穗木压块等,用于砧木与穗木的切削接合,并且可以在切削过程中对苗木起到夹持作用,保证切削时苗木不会因切削力而发生偏移;排苗装置由嫁接苗压紧气缸、立柱、移动电磁铁、固定电磁铁、排苗滑台组成,用于保证经切削接合后的嫁接苗能从切削接合装置中较为顺利地排出。
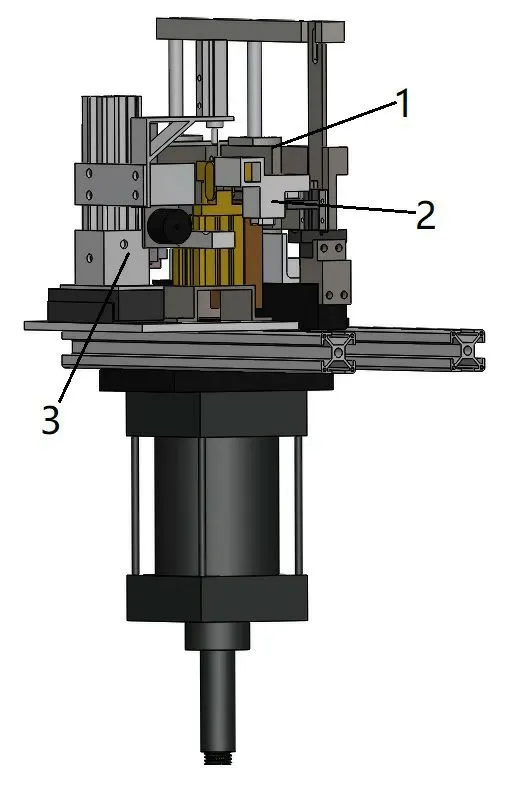
图4 切削接合机构
嫁接机械手一方面可以夹取、转移砧木转盘上的砧木至切削接合机构;另一方面可将经切削接合的嫁接苗转运至蜡封收集装置的储苗台中,等待进行蜡封操作。穗木旋转机械手用来夹取穗木转盘上的穗木并将其转移至切削接合机构,进行切削接合操作。
2.3 蜡封收集装置
蜡封收集装置是一个具有蜡封、冷却、收集功能的装置,如图5 所示。主要由电动旋转台、蜡封机械手、储苗台、冷却箱、收集箱以及蜡封装置组成,储苗台、蜡封装置、冷却箱与收集箱分布在蜡封机械手周围。该装置的主要工作过程是:蜡封机械手通过末端的手指气缸夹取储苗台上的嫁接苗,并将其转移至蜡封装置进行蜡封操作;蜡封完成后,蜡封机械手将嫁接苗取出并转移至冷却箱,进行冷却操作;冷却完成后,蜡封机械手再将嫁接苗转移至收集箱中,完成操作。
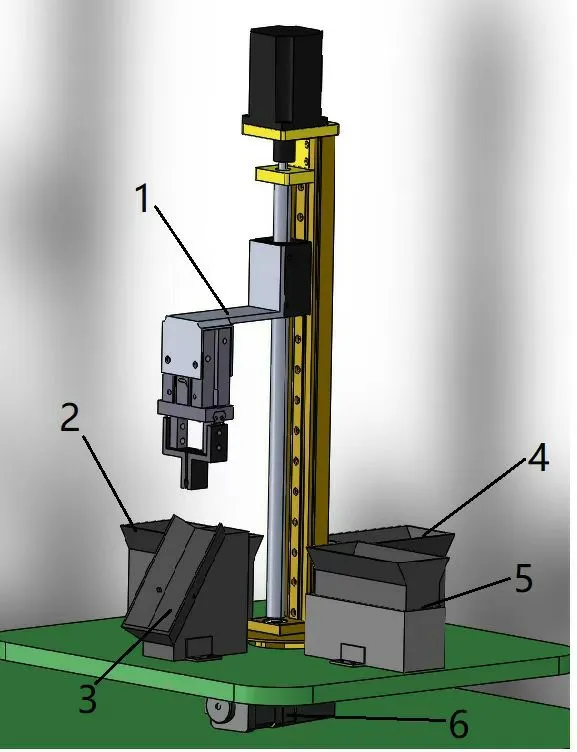
图5 蜡封收集装置
3 结论
以葡萄苗木为研究对象,设计了一种葡萄苗木嫁接机,可实现苗木的自动匹配、切削、接合、蜡封等功能,自动化程度较高,可以节省大量的时间与人力,对实现我国未来葡萄种植产业快速、健康发展具有重大意义。
猜你喜欢
农业科技通讯(2023年1期)2023-02-12
现代园艺(2022年11期)2022-06-09
河北果树(2021年4期)2021-12-02
中国生态农业学报(中英文)(2021年8期)2021-07-28
中国果业信息(2020年12期)2020-12-15
中南林业科技大学学报(2020年9期)2020-09-28
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
广西林业科学(2016年1期)2016-03-20
中国蔬菜(2015年9期)2015-12-21