
导弹打击地面弱红外目标的数字孪生导引律
2023-07-31 02:53王黎光税俊洁徐鲁辉于长青樊弋鸣
红外技术 2023年7期
王黎光,税俊洁,徐鲁辉,赵 炯,于长青,樊弋鸣
〈制导与对抗〉
导弹打击地面弱红外目标的数字孪生导引律
王黎光,税俊洁,徐鲁辉,赵 炯,于长青,樊弋鸣
(西京学院 计算机学院,陕西 西安 710123)
当红外制导导弹攻击地面目标时,自然或人为因素会导致目标红外特征减弱或消失,致使导引头无法探测或间断探测目标,极大影响制导精度。为解决这一问题,提出一种导弹攻击地面弱红外目标的数字孪生导引律。根据红外导引头在物理世界的导引过程,在数字世界构建目标及导引律的孪生数字模型,通过仿真得到并保存制导全过程中各时间点上导弹运动及控制的状态参数,作为制导过程的数字孪生。实际引导中,当导引头无法得到测量信号时,它的数字孪生数据立即被激活接管导引头的工作,以导引头的孪生数据为控制系统提供加速度指令。仿真算例表明,导引头的数字孪生可在导引头无法捕获信号时,为控制系统提供机动指令对导弹实施精确引导。数字孪生导引律对红外伪装、红外干扰及恶劣气候具有鲁棒性,有广阔的应用前景。
红外目标探测;地面弱红外目标;数字孪生;数字孪生导引律
0 引言
传统红外制导导弹在攻击地面目标时,通过导引头不断测量自身到攻击点的视线角,根据导引律得到导弹的控制加速度,引导导弹命中目标[1-2]。但是当出现雨、雪、雾、沙尘等天气时,目标的红外特征极大减弱,可能导致测量到的视线信号时断时续[3]。此外,为保护目标,通常人为采用释放烟雾、发射干扰、遮蔽目标、伪装等方法削弱导引头对目标的测量[4-6]。当红外导引头无法捕获目标红外信号时,导引系统就不会产生制导指令,无法引导导弹精确命中目标。为解决这一问题,出现了许多技术。红外+惯导的组合制导就是重要的方法之一。其基本原理是:当红外导引头无法测量时,启动惯导实施导引,这种方法解决了导引头失效时的有效导引问题,但惯导会产生积累误差,影响制导精度[7-8]。基于轨迹预测的方法是根据红外导引头失效时导弹的运动状态及目标的攻击点,采用弹道模型预测剩余的飞行轨迹,对导弹实施导引。这种方法对轨迹预测模型的准确性要求较高,制导精度对模型的准确性很敏感[9-10]。
数字孪生技术把物理世界的对象特征以数字化的形式映射到数字世界,构建对象的数字孪生体,以数字孪生体的特征替代现实世界中无法或难以获取的对象特征,从而解决现实问题[11-13]。数字孪生技术从诞生至今,已在航空航天[14]、城市管理[15-16]、测绘[17]、农业[18]、智能制造[19-20]、采矿[21]、物流[22]、安全生产[23]、健康管理[24]等各个领域被广泛应用。基于数字孪生技术的导引律是一种崭新尝试,在实际制导之前,通过精确实验或仿真获得红外制导导弹对地攻击过程中在每个时间观测点上所对应的导弹的位置、速度、加速度等状态信息,构建出导引律的数字孪生模型,这些数据反映的运动状态是导弹实际运动引导时的数字映射,如同其孪生体。当导引头无法得到测量信号时,激活相应的数字孪生数据作为制导系统的测量信号,使控制系统继续正常工作;当导引头重新捕捉到目标信号后,根据数字孪生数据对实测数据进行校验并对弹道进行修正,引导导弹按照孪生数据刻画的轨迹对目标实施攻击。
1 红外导引头模型
1.1 红外导引头探测模型
红外导引头是探测目标的物理器件,为导引律提供导弹到目标的视线角。若因为气候原因或目标进行红外防护或实施干扰,可能导致红外导引头无法测量视线角。红外导引头的数字孪生是导引头工作时关键参数的数字映射,能同步表征导引头的实际工作状态,在导引头不能正常工作时,替代导引头输出关键参数,确保导弹制导控制系统正常运行。
假设导弹采用红外凝视焦平面阵列成像导引头,目标的红外辐射透过探测器镜头在焦平面上成像,当目标红外信号的信噪比大于探测元灵敏度时,被探测元探测到并根据相应计算方法得到视线角。
根据普朗克公式,黑体在波长为、温度为tem时的辐射出射度B(,tem)为:

式中:B(,tem)为黑体辐射出射度,W×m-2×mm-1;是波长,mm;tem为绝对温度,K;1为第一辐射常数3.74×10-6W×m2;2为第二辐射常数1.44×10-2m×K。目标通常都不是绝对黑体,可看作灰体,其辐射出射度(,tem)为:

式中:是出射率,是无单位的常数。
假设灰体为理想漫反射体,则光谱辐射亮度(,tem)为:
(,tem)=B(,tem)/p(3)
(,tem)单位为W×cm-2sr-1mm-1。
在波段[1,2]上的光谱辐射亮度为:

故可得到在波段[1,2]上的光谱辐射强度为:
(1,2,tem)=(1,2,tem)T(5)
式中:T为目标的辐射面积。
目标的光谱辐射在大气中传输到红外导引头,再经过光学系统到达焦平面,在导引头焦平面上的光谱辐射强度为:
式中:1为大气透过率;光学系统的透过率;为目标与导引头之间的距离;为导引头孔径直径;为辐射在探测元上的驻留时间,也就是系统的数据采样周期。目标的信噪比大于探测元的测量灵敏度时,探测元就可以探测出目标。
1.2 红外导引头测角模型
视线角是红外导引头数字孪生的重要参数之一,来源于导引头的实际测量。红外导引头测量视线角的原理如图1所示,复杂的光学成像系统可等效为凸透镜,为凸透镜的光心,为焦平面的中心,是焦平面的坐标原点,的长度就是凸透镜的焦距。

图1 红外导引头视线角测量原理示意图
导引头固定在弹体纵轴上,以焦平面中心为原点建立弹体测角的坐标系,轴是弹体纵轴,+方向指向弹体头部,与光轴重合;+轴沿弹体右翼指向外,为正的偏航轴,轴以右手法则确定,为弹体俯仰轴。设目标红外像点与焦平面的交点为(L,L),其中L、L为测量坐标系中的坐标,、分别是点在、轴上的投影。根据几何关系可计算出视线相对于光轴的偏航角和俯仰角,从而得到目标相对于光轴的视线偏角。图中Ð就是视线在弹体坐标系中的偏航角,用表示,Ð就是视线在弹体坐标系中的俯仰角,用表示。
如果目标的像被某个探测元探测到,根据该探测元中心坐标以及透镜的焦距,就可计算出相应的视线角。假设图1中点探测到目标,据几何关系可得:
=arctan(L/) (7)
=arctan(L/) (8)
式中:是透镜的焦距。当目标较大或距离导引头很近时,目标的像不是点特征,而是图像特征,就能被个探测元同时探测到,根据融合算法,计算出热像中心所对应的坐标作为目标的坐标,计算相应角度。
式中:(y,z)是目标质心在焦平面上的坐标;y是探测到目标的第个探测元的坐标;z是探测到目标的第个探测元的坐标。
1.3 导弹的导引律模型
红外制导导弹通常采用比例导引律模型,根据比例导引律可得,当导弹飞向目标的过程中,要确保导引头始终瞄准目标,弹体在俯仰及偏航方向的控制加速度必须为:
式中:a()、a()分别为弹体在俯仰及偏航方向上第时刻控制加速度;是比例导引常数,通常取3~5,
2 基于数字孪生技术的红外导引头制导模型
2.1 模型原理及结构
数字孪生体是物理世界中的对象在数字世界的映射,可同步提供与本体相同的关键数据。具体而言,基于数字孪生技术的红外制导模型把物理世界中导引头的探测、测角、制导控制、指令产生等过程映射到数字世界,构建红外导引的数字孪生体,它能同步产生与物理设备完全相同的数字孪生特征,这些特征用各种参数进行描述。根据红外导引头的工作原理,红外导引头的数字孪生体结构原理图如图2。
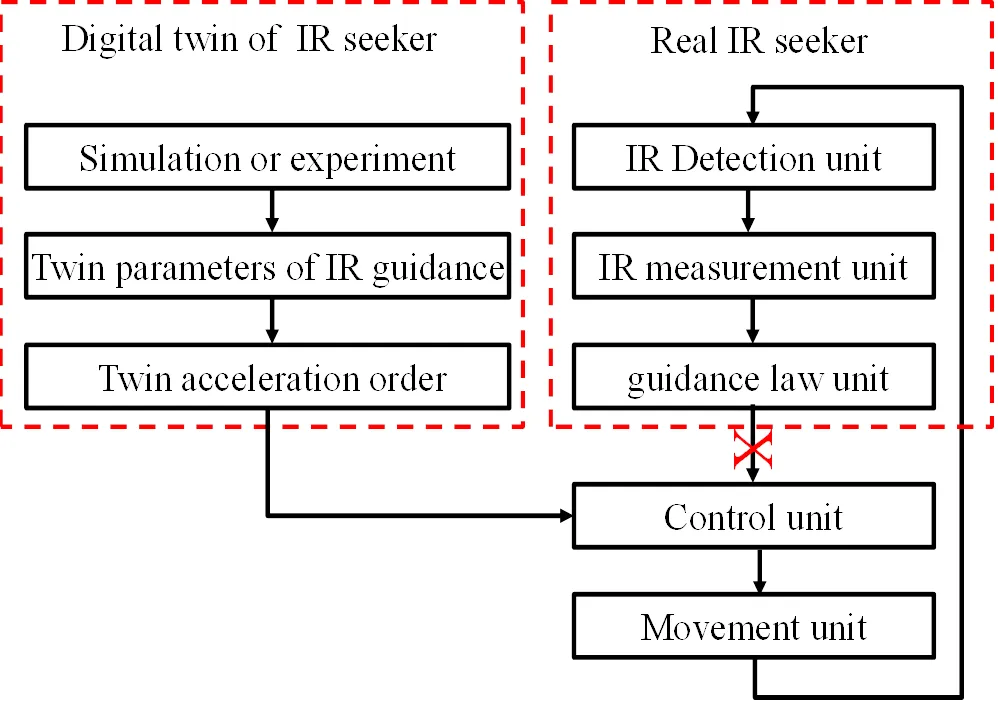
图2 红外导引头的数字孪生结构图
2.2 数字孪生模型实现
图3是红外导引头数字孪生的实现示意图。
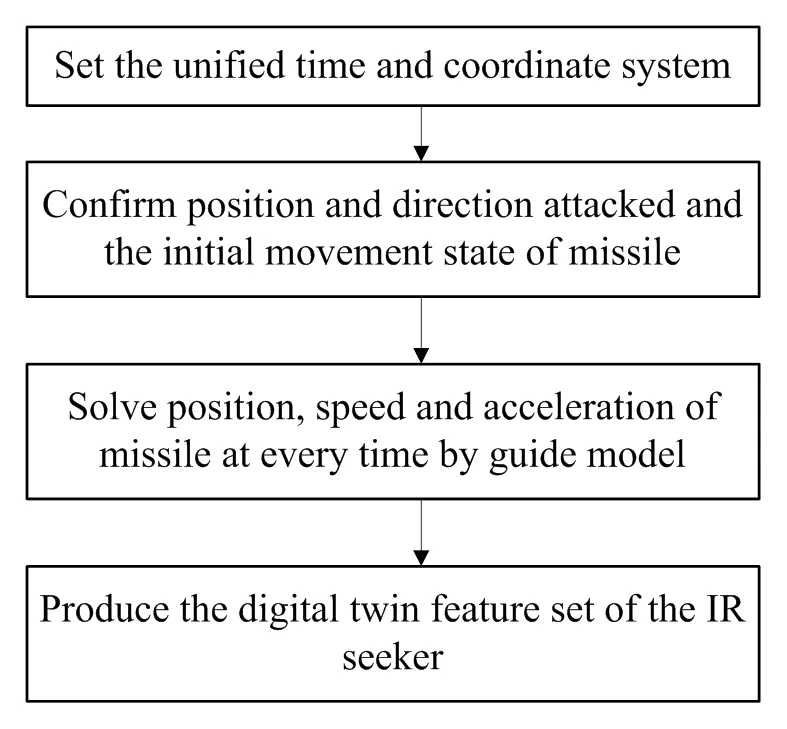
图3 红外导引头数字孪生的实现步骤
步骤1:设定统一时间及坐标系
为了准确描述攻击点位置、攻击角度、目标立体结构、脱靶量等信息,需要建立统一的坐标系,定义相关参数。以地面上一点为坐标原点(理论上原点可以任意选取,为便于计算,常选择在攻击点附近),建立东北天坐标系,攻击点及制导过程中导弹的位置都能够用坐标描述。时间以导弹开始攻击目标为起始时间,通过导弹上的时钟控制采样周期及记录时间,计时器=1, 2, 3…,则时间被离散表示为[0、、2…],其中是导引头的数据刷新周期。
步骤2:标定目标位置及攻击要求参数
设点为预定攻击点,即希望导弹命中的攻击点的位置,表示为:(T,T,T);
为评估导引精度,定义脱靶量等相关参数。
靶平面:假设目标的轮廓用曲面描述,以预定弹着点为切点的目标轮廓曲面的切平面。靶平面如同实际打靶时用的靶标,用来衡量导弹攻击目标时,实际攻击位置与预定攻击位置之间的距离。预定弹着点就是靶标的靶心。靶平面用平面方程表示:

实际弹着点¢:实际攻击目标时,导弹在目标上的攻击点位置,是导弹实际运动轨迹与靶平面的交点,表示为¢:(T¢,T¢,T¢);
制导精度用脱靶量d表示,是实际弹着点与预定弹着点在靶平面上的距离:

步骤3:算制导过程中导弹位置、速度、加速度
导弹质心位置为(,,),速度为(v,v,v),为导弹的状态变量,定义为:
=(x y z v v v)T(13)
导弹飞行过程中,依靠、、轴上的加速度控制导弹的飞行状态,是导弹运动的控制变量,定义为:
c=(acacac)T(14)
根据运动学知识,可以得到导弹运动状态参数的递推公式,得到导弹在任意时刻时的位置、速度等参数。
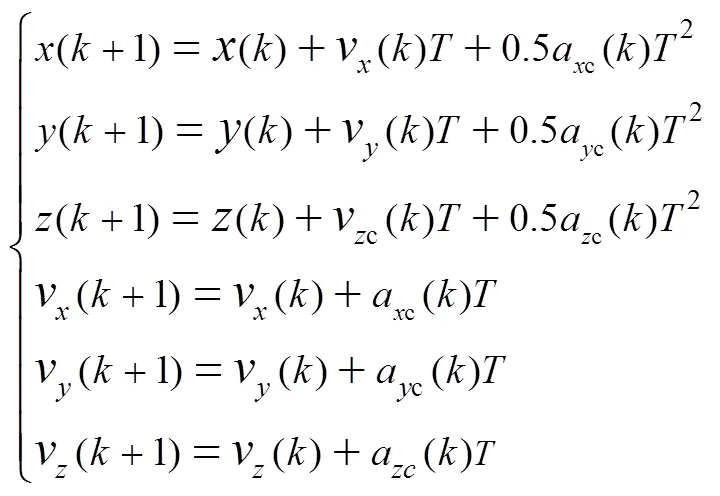
步骤4:生成导引头的数字孪生特征集
通过上述步骤,即可在实际攻击前,通过仿真计算得到导引头按照预定攻击方向对预定目标实施攻击全过程的运动数据,对数据进行整理形成导引头的数字孪生特征集,如表1所示,通过相应控制方法在需要时使用。
表1中包括了时间、导弹位置、速度、加速度4种属性,其中时间是导弹从开始制导时,由弹体中的时钟进行计时,直到导弹轴坐标与攻击点轴坐标重合时结束,时钟的采样周期为,时间是使导引头与数字孪生时间同步的控制参数。位置、速度及加速度由空间3维坐标表征。
2.3 基于数字孪生的红外导引流程
图4是基于数字孪生的红外导引的流程图。
首先给各参数赋初值进行初始化,红外导引头开始工作,时钟控制导引头与其数字孪生保持同步。导引系统判断导引头是否能够正常工作,如果能正常工作,在下一个时刻继续判断,如果发现导引头不能正常工作时,系统启动导引头的数字孪生数据,根据时间同步能够调取此时导弹的位置、速度、加速度等状态属性的数字孪生数据,根据导引律要求为控制系统提供相应的孪生数据,控制导弹攻击目标。如果导引头又恢复了工作,系统把导引头获取的参数与其数字孪生数据对比,其中的误差就是导弹偏离预定轨道的误差,通过相应的弹道修正方法进行修正。当计时器的时间大于总时间total时,导引结束。
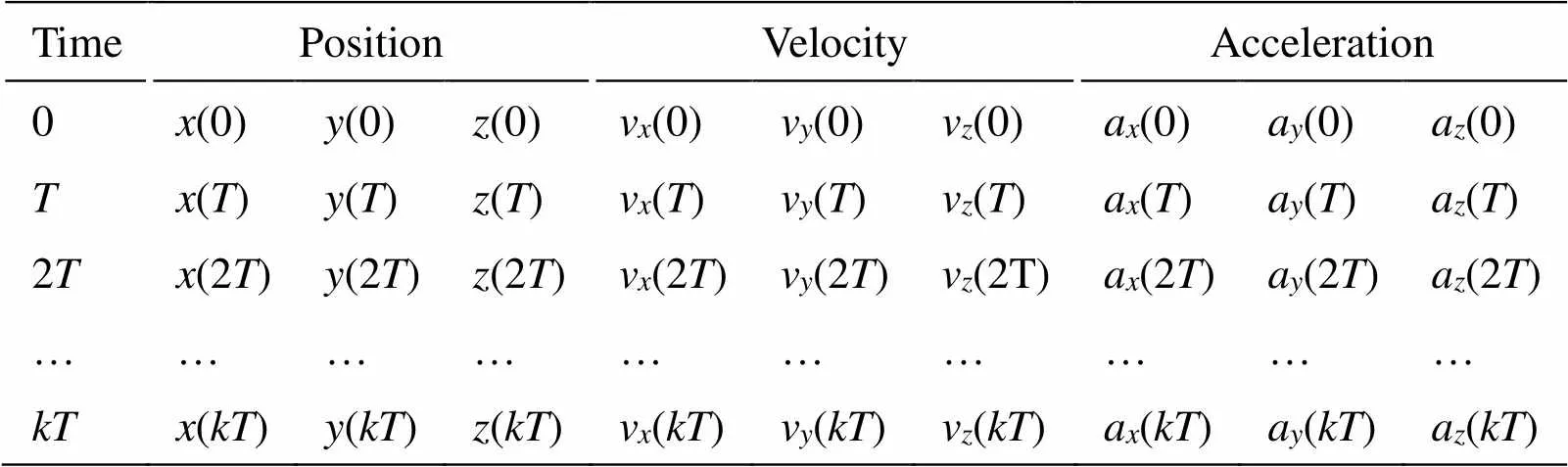
表1 红外导引头的数字孪生属性集
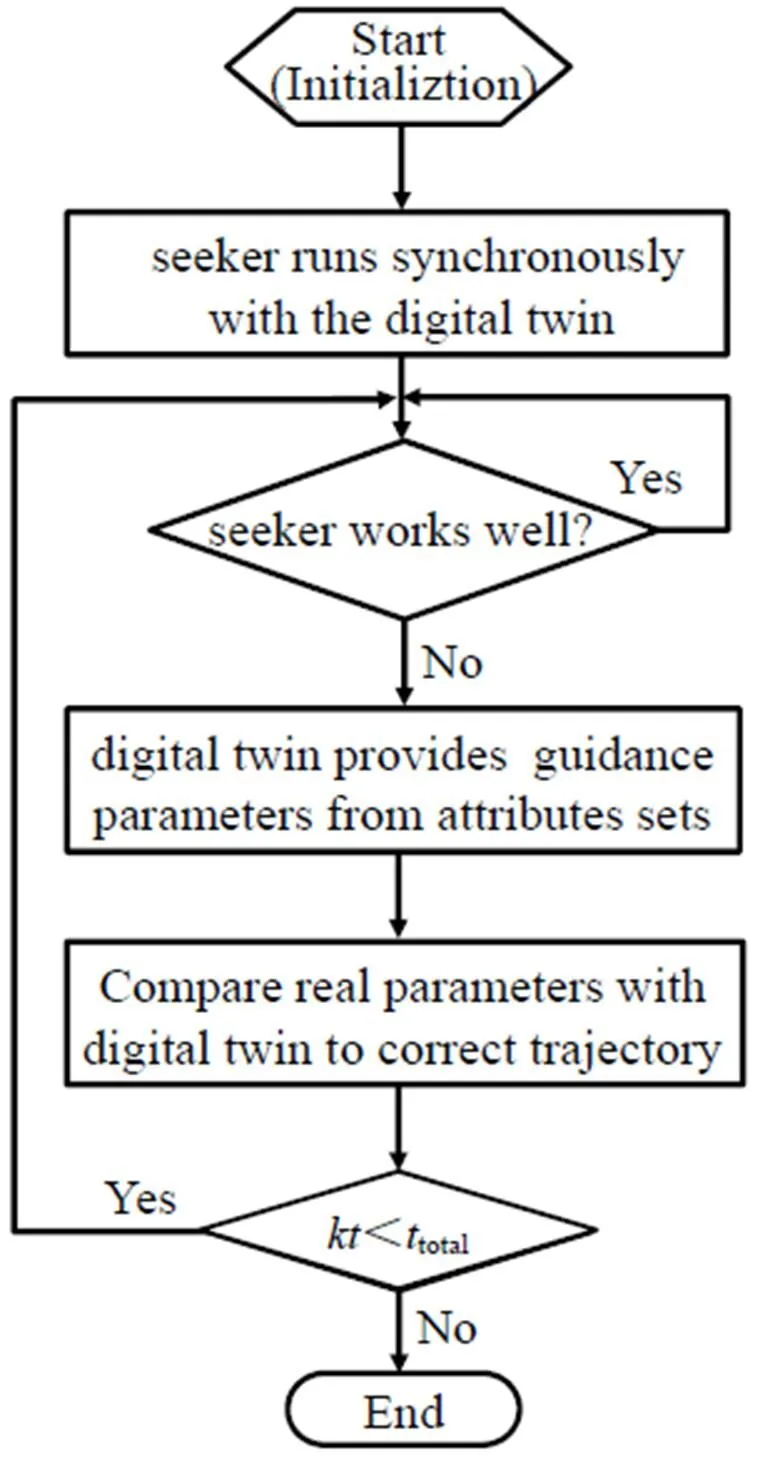
图4 基于数字孪生的红外导引流程
3 性能分析与仿真
为分析基于数字孪生的红外导引律的性能,设置如下仿真想定。
想定1:假设攻击点为地面上一幢大楼的第10层的一个窗户,攻击目标时因为天气致使目标红外信号非常弱,红外导引头突然无法测量视线角,启动数字孪生数据实施导引,检验数字孪生导引的效果。
仿真条件:以攻击点在地面上的投影点为坐标原点,建立东北天坐标系(ENU:East-North-Up),攻击点坐标为(0,0,30);导弹径向速度大小为400m/s,在导引过程中始终不变,导弹已事先装订了数字孪生数据。假设导引头停止工作时所处的实际位置为:(20000,1200,1200),速度的方向指向目标,在弹体的俯仰和偏航方向速度均为0。此时读取的孪生数据中目标位于(2000,800,800)点,速度的方向也指向目标,在弹体的俯仰和偏航方向速度均为0。运行数字孪生导引律,作出导弹拦截轨迹,并与孪生数据提供的预定轨迹进行对比。仿真结果如图5所示。
根据想定1及设置的仿真条件可知,导引头无法测量视线角时在(20000,1200,1200)点,径向速度大小为400m/s,指向目标。采用传统的导引方法,导弹只能根据当前飞行状态,在没有制导的情况下飞向目标,攻击点和攻击方向都不能满足预先设计的要求。而基于数字孪生的制导方法在导引头无法探测目标时启动数字孪生信号,根据制导流程检测到导弹与预定攻击方案在俯仰和偏航方向分别有400m的弹道偏差需要修正,速度方向也不符合设计要求,控制系统采用弹道修正算法对位置和速度偏差进行修正,最终按照预定的方向精确命中目标,说明数字孪生制导方法是有效的。
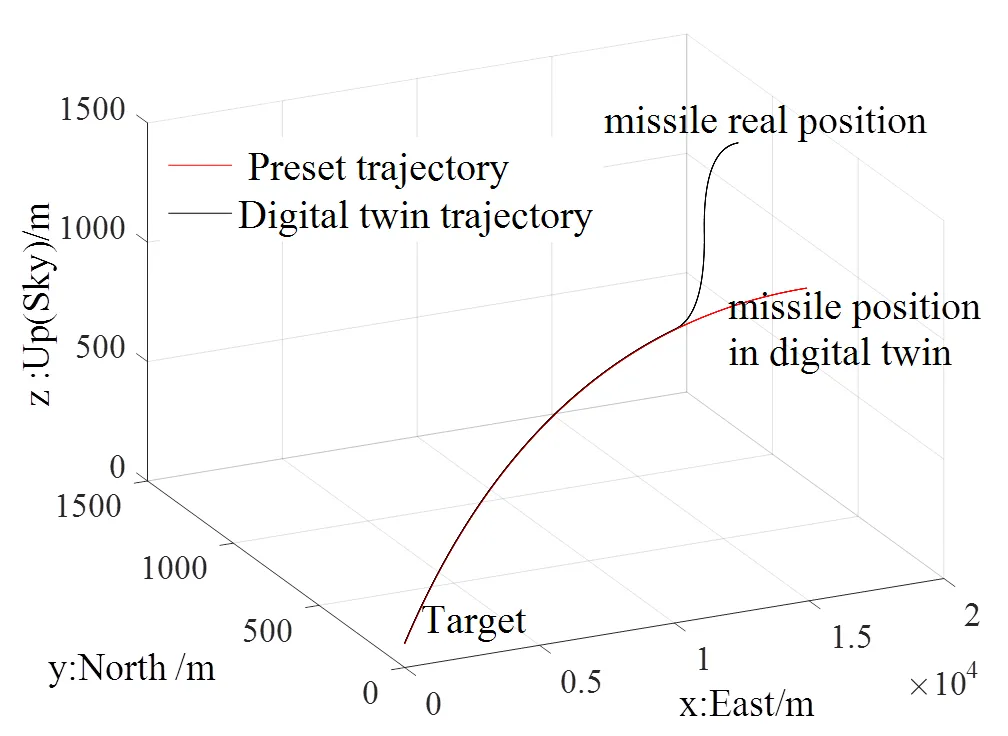
图5 数字孪生导引时的导弹轨迹
想定2:假设攻击点仍为想定1中10楼的窗户,但导引头的孪生数据分别设定了两种不同的攻击路径,进行两次仿真,分别启动两种不同的数字孪生数据实施导引,分析两种不同的预设路径下的导引效果,验证数字孪生导引对不同预设方案的适应性。
仿真条件:以攻击点在地面上的投影点为坐标原点,建立东北天坐标系,攻击点的坐标为(0,0,30);导弹径向速度大小为400m/s,在导引过程中始终不变,方向指向目标,导弹已事先装订了两组不同的数字孪生数据。导引头停止工作时所处的实际位置为:(20000,1200,1200),此时孪生弹道1中目标应该位于(2000,1000,1000),孪生弹道2中目标应该位于(2000,800,800)。分别运行两种不同的数字孪生数据,对比导弹拦截轨迹,分析导弹是否能够按照各自预定轨迹攻击目标,实验结果如图6所示。
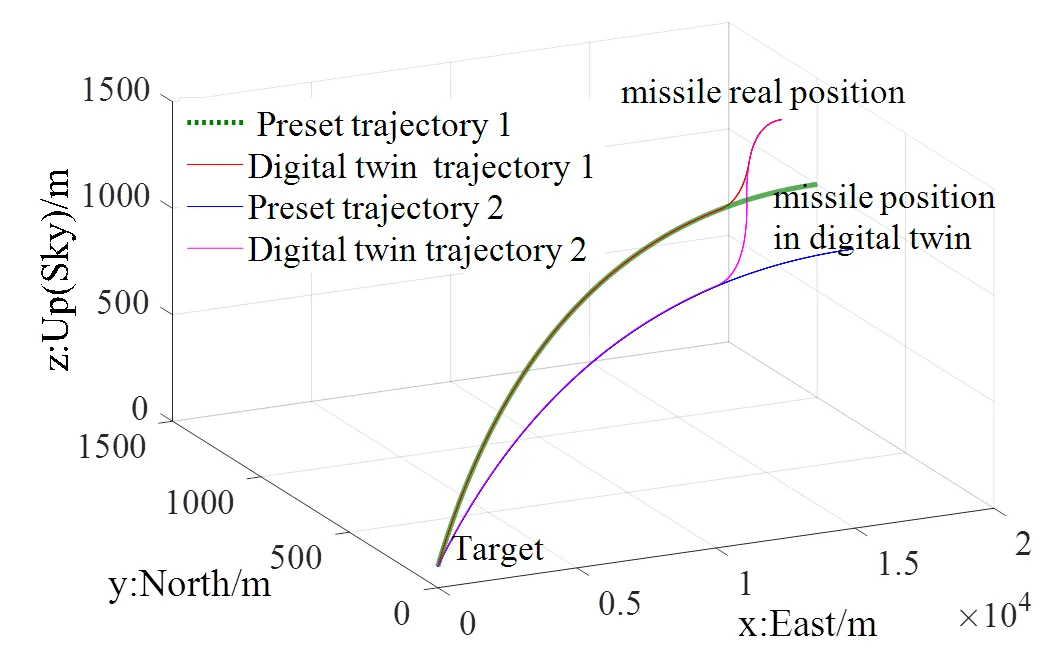
图6 不同孪生弹道时的导弹轨迹
从图6可以看出,绿色和蓝色的曲线分别是数字孪生提供的预设的攻击路径,但导引头在无法测量目标时,与预设轨迹1及预设轨迹2在俯仰和偏航方向分别有200m级400m的距离需要修正,攻击方向也存在误差。图6中红色和紫色曲线分别是数字孪生导引的弹道,可以看出,经过一段时间修正后,导弹均按照各自的要求以预定的方向命中目标,表明对于不同的预设路径,数字孪生制导均能按照预设方案完成精确打击。
想定3:假设攻击点仍为想定1中10楼的窗户,分别进行两次仿真,这两次仿真采用同样的数字孪生导引方案,但两次仿真中导弹初始的实际位置不同,通过仿真结果验证导弹不同的初始状态对数字孪生导引方法的适应性。
仿真条件:以攻击点在地面的投影点为坐标原点,建立东北天坐标系,攻击点坐标(0,0,30);导弹径向速度大小400m/s,导引过程中始终不变,方向指向目标。导弹事先装订数字孪生数据,导引头停止工作时,孪生弹道中目标位于(2000,1000,1000),第一次仿真中导弹实际初始位置为:(20000,1200,1200),第二次仿真中导弹实际初始位置为(2000,1400,1400)。分别运行仿真程序,分析导弹是否能在不同的初始状态下,最终按照预定轨迹攻击目标。实验结果如图7所示。
从图7可以看出,黑色的曲线是数字孪生提供的制导方案,蓝色和红色的曲线分别在俯仰和偏航方向修正了200m及400m的距离误差及攻击方向误差,最终两条轨迹均按照预定方案完成了攻击,表明导弹在启动数字孪生制导时,不同的初始运动状态对数字孪生导引具有适应性。
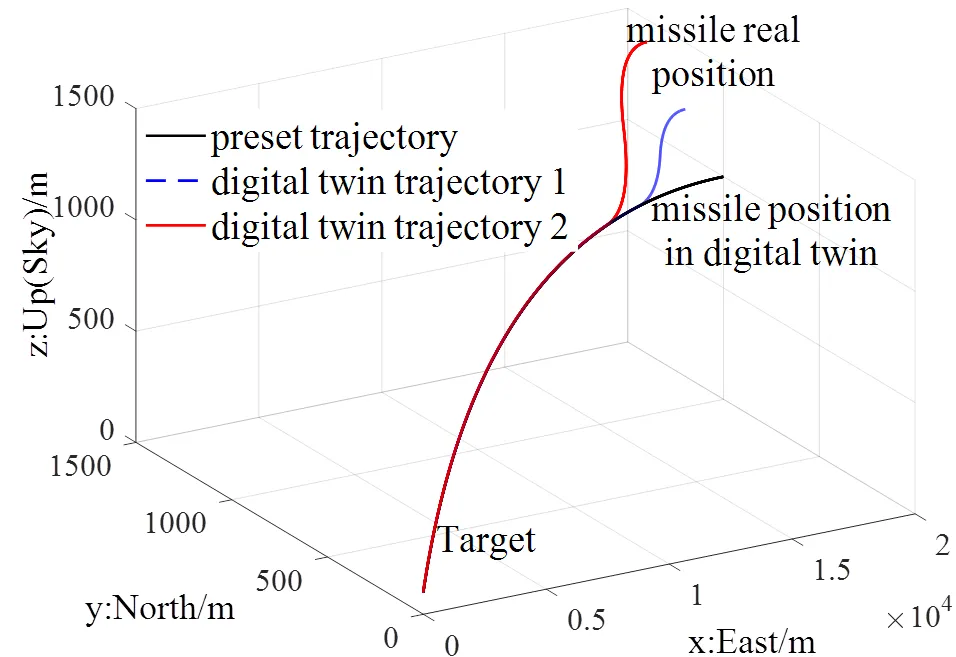
图7 不同初始状态时的弹道轨迹
4 结论
为解决红外导引头因对弱红外目标无法测量或断续测量而影响制导的问题,提出一种导弹攻击地面弱红外目标的数字孪生导引律。根据红外导引头的实际导引特性,在攻击目标前建立其制导过程的数字孪生属性集。实际引导中,当导引头无法测量目标时,其数字孪生数据立即被激活并接管导引头工作,以孪生数据为控制系统提供加速度指令。构建了数字孪生导引模型,阐述了算法实现过程,设置了典型应用想定对算法性能进行了分析,仿真结果表明,数字孪生导引方法能够在导引头无法捕获目标时,精确引导导弹按照预定攻击方向命中目标。导弹在不同的初始状态、对不同的数字孪生方案都具有适应性。
[1] 刘杰, 王博, 万纯, 等. 红外导引头工作原理及抗干扰措施分析[J]. 航天电子对抗, 2022, 38(2): 34-37, 43
LIU Jie, WANG Bo, WAN Chun. Working principle and anti-jamming measures analysis of infrared guidance[J]., 2022, 38(2): 34-37, 43.
[2] WANG Xinchun, MO Bo, LI Xuan, et al. A line-of-sight rate estimation method for roll-pitch gimballed infrared seeker[J]., 2019, 192: 162935-162935.
[3] 王本革, 杨明, 凌新锋, 等. 全天空红外云探测在航空气象中的应用[J]. 大气与环境光学学报, 2021, 16(5): 404-414.
WANG Benge, YANG Ming, LING Xinfeng, et al. Application of all-sky infrared cloud observation inaviation meteorology[J]., 2021, 16(5): 404-414.
[4] 李延伟, 高清京, 魏浩东, 等. 高帧频宽温度范围红外点源干扰装置设计[J]. 红外与激光工程, 2021, 50(11): 87-94.
LI Yanwei, GAO Qingjing, WEI Haodong, et al. Design of infrared point source interference device with high frame frequency and wide temperature range[J]., 2021, 50(11): 87-94.
[5] LI Kai, WANG Xuanyu, GAO Yanqing, et al. Preparation of nickel-coated graphene and evaluation of infrared interference performance[J]., 2022, 2194(1): 012043.
[6] 赵晓枫, 吴飞, 徐叶斌, 等. 基于背景还原的红外伪装效果评价方法[J]. 系统工程与电子技术, 2022, 44(8): 2554-2561.
ZHAO X F, WU F, XU Y B, et al. Evaluation method of infrared camouflage effect based on background restoration[J]., 2022, 44(8): 2554-2561.
[7] LU Mingfeng, LIU Bangcheng, WU Jianping, et al. The indoor automatic guided vehicle with an ir positioning and low-cost inertial navigation system[J]., 2013, 2307: 300-301.
[8] 卢瑞涛, 申通, 杨小冈, 等. 高动态条件下增量惯导信息辅助的空地红外弱小移动目标检测算法[J]. 红外与激光工程, 2022, 51(4): 50-60.
LU Ruitao, SHEN Tong,YANG Xiaogang. Infrared dim moving target detection algorithm assisted by incremental inertial navigation information in high dynamic air to ground background[J]., 2022, 51(4): 50-60.
[9] 陈文钰, 邵雷, 谭诗利, 等. 基于虚拟拦截点的预测制导算法设计[J]. 飞行力学, 2020, 38(3): 70-76.
CHEN Wenyu, SHAO Lei, TAN Shili, et al. Design of predictive guidance algorithm based on virtual intercepting points[J]., 2020, 38(3): 70-76.
[10] SHI Heng, ZHU Jihong, KUANG Minchi, et al. Cooperative prediction guidance law in target-attacker-defender scenario[J]., 2020, 64(4): 220-222
[11] 杨林瑶, 陈思远, 王晓, 等. 数字孪生与平行系统: 发展现状、对比及展望[J]. 自动化学报, 2019, 45(11): 2001-2031.
YANG Linyao, CHEN Siyuan, WANG Xiao, et al. Digital twins and parallel systems:state of the art, comparisons and prospect[J]., 2019, 45(11): 2001−2031.
[12] 刘大同, 郭凯, 王本宽, 等. 数字孪生技术综述与展望[J]. 仪器仪表学报, 2018, 39(11): 1-10.
LIU Datong, GUO Kai, WANG Benkuan, et al. Summary and perspective survey on digital twin technology[J]., 2018, 39(11): 1-10.
[13] BotínSanabria Diego M, Mihaita Adriana Simona, Peimbert García Rodrigo E, et al. Digital twin technology challenges and applications:a comprehensive review[J]., 2022, 14(6): 1335-1335.
[14] 孟松鹤, 叶雨玫, 杨强, 等. 数字孪生及其在航空航天中的应用[J]. 航空学报, 2020, 41(9): 6-17.
MENG S H,YE Y M, YANG Q, et al. Digital twin and its aerospace applications[J]., 2020, 41(9): 6-17.
[15] 王成山, 董博, 于浩, 等. 智慧城市综合能源系统数字孪生技术及应用[J]. 中国电机工程学报, 2021, 41(5): 1597-1608.
WANG Chengshan, DONG Bo, YU Hao, et al. Digital twin technology and its application in the integrated energy system of smart city[C]//, 2021, 41(5): 1597-1608.
[16] XIA Haishan, LIU Zishuo, Efremochkina Maria, et al. Study on city digital twin technologies for sustainable smart city design: A review and bibliometric analysis of geographic information system and building information modeling integration[J]., 2022, 84: 104009.
[17] 朱庆, 张利国, 丁雨淋, 等. 从实景三维建模到数字孪生建模[J]. 测绘学报, 2022, 51(6): 1040-1049.
ZHU Qing, ZHANG Li guo, DING Yu ling, et al. From real 3D modeling to digital modeling[J]., 2022, 51(6): 1040-1049.
[18] Purcell Warren, Neubauer Thomas. Digital twins in agriculture: a state-of-the-art review[J]., 2023(3): 100094.
[19] 郭亮, 张煜. 数字孪生在制造中的应用进展综述[J].机械科学与技术, 2020, 39(4): 590-598.
GUO Liang, ZHANG Yu. Review on application progress of digital twin in manufacturing[J]., 2020, 39(4): 590-598.
[20] Atalay Murat, Murat Ugur, Oksuz Busra, et al. Digital twins in manufacturing: systematic literature review for physical–digital layer categorization and future research directions[J]., 2022, 35(7): 679-705.
[21] 张帆, 葛世荣, 李闯. 智慧矿山数字孪生技术研究综述[J]. 煤炭科学技术, 2020, 48(7): 168-176.
ZHANG Fan, GE Shirong, LI Chuang. Research summary on digital twin technology for smart mines[J]., 2020, 48(7): 168-176.
[22] 靳建峰, 王琳. 农产品供应链数字孪生体系构建研究[J]. 物流工程与管理, 2022, 44(6): 86-88, 132.
JIN Jianfeng, WANG Lin. Research on the construction of agricultural products supply chain system based on digital twin[J]., 2022, 44(6): 86-88, 132.
[23] 付敏, 郝镒林, 李萌, 等. 安全工程技术领域数字孪生应用研究综述[J]. 中国安全生产科学技术, 2022, 18(4): 243-248.
FU Min, HAO Yilin, LI Meng, et al.Summary of digital twin application research in field of safety engineering technology[J]., 2022, 18(4): 243-248.
[24] Elkefi Safa, Asan Onur. Digital twins for managing health care systems: rapid literature review[J]., 2022, 24(8): e37641-e37641.
Digital Twin Guidance Law for Missile to Hit Weak Ground Infrared Target
WANG Liguang,SHUI Junjie,XU Luhui,ZHAO Jiong,YU Changqing,FAN Yiming
(School of Computer, Xijing University, Xi'an 710123, China)
When an infrared-guided missile attacks a ground target, natural or human factors can cause the infrared characteristics of the target to weaken or even disappear. The seeker cannot or intermittently detects the target, which significantly affects the guidance accuracy. To solve this problem, a digital twin guidance law is proposed for hitting a weak infrared target on the ground. On the basis of an infrared seeker in the physical world, digital twin models of the target and guidance laws are developed in the digital world. The state parameters of the missile motion and control in the guidance process at each point in time are obtained by simulation, and saved as the digital twin of the guidance process. During guidance process , when the seeker cannot obtain the measurement signal, its digital twin is activated immediately to take over and provide the control system with the acceleration order. Simulations show that the digital twin of the seeker can provide the missile control system with the maneuver order to accurately guide the missile when the infrared seeker is unable to capture the signal. The digital twin guidance law is robust against infrared camouflage, interference, and bad weather, and has broad application prospects.
infrared target detection, ground weak infrared target, digital twin, digital twin guidance law
V448.21
A
1001-8891(2023)07-0768-07
2022-09-11;
2022-11-23.
王黎光(1974-),陕西西安人,副教授,博士,研究方向为红外目标探测、导弹制导与控制、数据挖掘、数据科学与大数据技术等。E-mail: wlgpost@sina.com。
国家自然科学基金面上项目(62273284);陕西省自然科学基金(2023-JC-YB-527);西京学院高层次人才专项基金(XJ21B06);校企合作技术开发项目(2022610002004881)。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
