
地球静止轨道凝视红外相机抖动引起杂波研究
2023-07-31 02:53:58卞铂渊李晓曼晋利兵练敏隆
红外技术 2023年7期
卞铂渊,周 峰,李晓曼,晋利兵,宫 辉,练敏隆
〈系统与设计〉
地球静止轨道凝视红外相机抖动引起杂波研究
卞铂渊,周 峰,李晓曼,晋利兵,宫 辉,练敏隆
(北京空间机电研究所,北京 100094)
对于地球静止轨道凝视红外相机,相机视线抖动引起的杂波是背景特征、相机参数、相机视线抖动特性和背景抑制算法等因素综合影响的结果。为了定量化评估视线抖动引起杂波的强度,综合考虑抖动频谱、探测器积分时间、帧周期和帧间差分背景抑制算法这几项时间相关因素,将它们合并为与背景无关的抖动等效角,建立了抖动等效角与背景辐射强度梯度统计量相乘形式的抖动引起杂波模型。基于相机视线抖动特性地面测量实验,分析了制冷机和动量轮引起的相机视线抖动频谱,对视线抖动引起的杂波进行了仿真模拟和模型计算,验证了理论模型。结果显示,所建立的抖动引起杂波模型计算结果与仿真模拟结果的相对偏差小于15%,具有较好的通用性和高效性,适用于相机设计的迭代优化。
地球静止轨道;凝视红外相机;抖动等效角;抖动引起杂波
0 引言
地球静止轨道凝视相机可实现固定位置的高帧频成像,具有高空间分辨率、高时间分辨率和高灵敏度探测等优点,在红外目标探测领域发挥着重要作用。由于背景辐射的空间分布不均匀性,相机视线抖动导致落在探测器像元上的辐射能量发生变化,产生视线抖动引起的杂波。抖动引起杂波的强度与背景特征、相机参数、视线稳定度和背景抑制算法等因素有关。由于探测灵敏度和空间分辨率需求的不断提升,抖动引起杂波对相机探测性能的影响逐渐显著。定量化描述和分析视线抖动引起的杂波,有助于系统总噪声的计算、视线稳定度的控制和相机参数的设定与调整。
国内外许多学者对相机视线抖动引起的杂波进行过相关研究。胡方明[1]利用运动传递函数,分析了线性、正弦和随机3种运动形式对红外成像系统性能的影响,建立了成像系统动态性能理论模型,并结合背景杂波对约翰逊准则的修正,对动态性能模型进行了仿真计算。Pohlman[2-3]针对星载凝视相机,度量和分析了系统噪声和杂波,主要包括:探测器和电路的噪声、背景辐射引起的光子噪声、相机视线不稳定性引起的杂波、云的运动和太阳光线变化引起的杂波。Rapier[4-5]提出了杂波等效目标(Clutter-equivalent Target,CET)的快速估计近似方法,在阶差分算法条件下,将CET表示为背景功率谱密度、光学系统参数、探测距离和相机视线运动特征的函数。Myers[6]针对一阶和二阶差分算法,通过对短波和中波红外谱段下的强反射背景进行模拟,分析了CET与相机空间分辨率、视线运动特征和抖动幅度的关系。Fraedrich[7]评估了帧间差分算法的杂波抑制能力,分析了杂波抑制因子与相机视线特征、探测距离、瞬时视场和帧周期等参数的关系。Casey[8]提出了通过系统建模和权衡分析向系统设计提供反馈的方法,例如:对于采用帧间差分算法检测运动目标的凝视系统,可通过减少抖动而提高系统性能,但需要权衡相应的成本增加。Schroeder[9]和Lee[10]分析了点源探测器在功率谱描述背景中的一维抖动。Liang[11]分析了阶跃辐射背景中的一维抖动,提出了定量评估视线抖动对相机性能影响(信噪比下降)的方法。Hu[12]考虑了二维抖动和相机空间分辨率的影响,但仅使用功率谱模型描述背景,没有考虑抖动引起杂波的空间分布。
本文首先分析了探测器像元上的辐通量梯度与背景辐射强度梯度的关系,推导了焦平面上的辐通量分布与背景辐射强度分布的关联方程,然后综合考虑抖动引起杂波的时间相关影响因素,推导了与背景无关、适用于各个探测器像元的抖动等效角模型,将平均抖动杂波强度表示为抖动等效角和均方根背景辐射强度梯度统计量的乘积,最后通过MATLAB仿真模拟,对抖动引起杂波模型进行了验证。
1 探测器像元上的辐通量梯度
本文将抖动描述为相机视线与基准位置==0的二维时变角度偏差((),())。在焦平面坐标(,)下,((),())对应于焦平面上的图像偏移(D(),D()),其中D()=0(),D()=0(),0为光学系统焦距。设(,,)为时刻焦平面上点(,)处的辐照度,则以(,)为中心的单个探测器像元上的辐通量(,,)为:
对于D(0)=D(0)=0的基准时刻0,则(¢,¢)处的辐照度为(¢,¢,0)。当抖动在时刻将图像平移(D,D)时,辐照度(¢,¢,)为:
E
(
x
¢
,
y
¢
,
t
)=
E
(
x
¢
+
D
x
,
y
¢
+
D
y
,
t
0
) (2)
因此,焦平面上固定点(¢,¢)处辐照度的时间变化可与0时刻辐照度的空间变化相关联。由公式(1)和(2),探测器像元上的辐通量为:
则单个探测器像元上辐通量的时间变化可与0时刻辐通量的空间变化相关联。对于较小的抖动位移,考虑辐通量的空间变化,上式右边可用泰勒级数线性近似为[11]:

因此,探测器像元上辐通量的时间变化为:

或用向量表示为:

2 背景辐射强度梯度模型
对于地球静止轨道对地凝视红外相机所成图像,设背景辐亮度为(e,e),其为地面位置坐标(e,e)的函数,下标e表示地球坐标系。对一个小矩形区域(De,De)上的辐亮度进行积分,得到辐射强度为(e,e)DeDe,则这个小区域所成图像为以(¢,¢)为中心的焦平面上面积为D¢D¢的矩形,其平均辐照度为(¢,¢)。在没有抖动的基准时刻0,焦平面坐标与地球坐标的关系为:
式中:o为光学系统焦距;为相机到地球的距离。
类似地,所成图像区域的尺寸为:
小区域的平均辐照度为收集功率除以成像面积,则:
式中:为相机入瞳面积;为系统透过率。
由公式(1)、(7)和(9)可知,探测器像元上的辐通量与背景辐亮度的关系为:
所以,需要对上式求导。而地面分辨率对和的约束为:
式中:DcDc为地面坐标系中地面分辨率大小。将上式对和分别求导,从积分极限中提取出/因子,则:
式中:(c,c)为瞬时视场范围的中心。
上面两式右边的积分值完全取决于背景和地面分辨率,可从二维图像数据中进行评估。将背景表示为像素大小为DD的二维阵列,L,n为第行和第列像素的辐亮度。设瞬时视场范围对应×像素的方形,(,)为×像素方形角落处的图像像素,L,j为其辐亮度,则方向上的梯度分量近似为:
式中:¶/¶的单位为W/(sr×m),可通过下式计算每个像素上的辐射强度b,n得到:
bm
,n
=
Lm
,n
D
x
D
y
(17)
将¶/¶重新表示为:
类似地,方向上的梯度分量为:

图1 瞬时视场范围(3×3)移动一个像素前后示意图
Fig.1 Schematic diagram of the IFOV (3×3) before and after moving by one pixel

3 抖动等效角模型
对于以一定背景辐射强度梯度为中心的单个探测器像元,抖动杂波与抖动频谱、探测器积分时间、帧周期和背景抑制算法有关。这些因素可以合并为一个对所有探测器像元都相同的性能参数J,即系统的抖动等效角。
对于单个探测器像元,在积分时间int内积分得到电子数()[2]:

式中:为波长;为量子效率;为普朗克常量;为光速。分析可知,电子数()波动的统计特性取决于抖动的统计特性。设()为梯度方向上的时变抖动角度偏差;()为其相关函数,称为抖动相关函数,定义为:
()=<()(-)> (23)
在各向同性二维抖动的情况下,()也可以描述任何其他方向的抖动特性。
由所建立的辐通量梯度模型可知:
(,,)=(,,0)+|Ñ|×o×() (24)
因此,辐通量变化的相关函数为:

对于帧间差分背景抑制算法,抖动杂波的强度可由帧间差分法的均方输出(以电子数形式)来描述。若相机帧周期为,则时刻帧间差分法的均方输出为:
<(,)2>=<[()-(-)]2>=
2[<2()>-<()(-)>] (26)
式中:<>表示均值;<2>表示均方值。
上式的最后一步是假设抖动为平稳随机过程,即()的变化是平稳随机过程,因此,<(-)2>=<2()>。
采样相关函数()为:
()=<()(-)> (27)
则帧间差分法的均方输出为:
<(,)2>=2(0)-2() (28)
经变量变换¢=-int+,式(22)可表示为:
因此,()可由二重积分表示为:

根据上述方程,上式可以用抖动相关函数表示为:

则采样相关函数(0)和()可用抖动相关函数表示为[11]:


抖动统计量通常用功率谱密度()表示,而功率谱密度与抖动相关函数之间存在以下关系式[15]:
则将采样相关函数用功率谱密度表示为:

最后,将公式(33) (34)代入公式(28),得到帧间差分法的均方输出的表达式为:

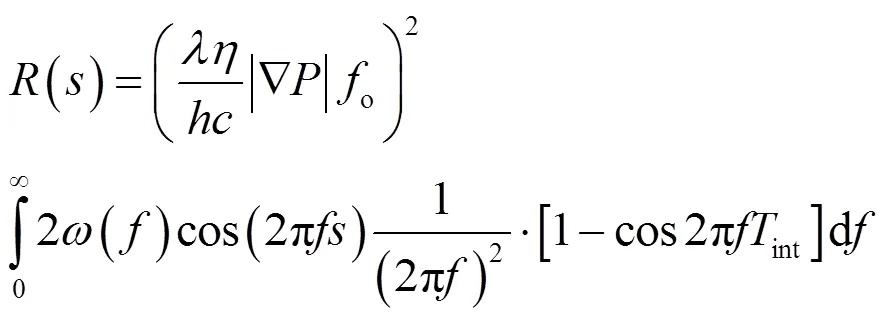
其中:

因此,抖动等效角J可由抖动功率谱密度()和帧间差分算法传递函数表示为:
由于()的单位为rad2/Hz,无量纲,因此J的单位为mrad。
由以上推导过程可知,抖动等效角实际上描述了在探测器积分时间和帧间差分背景抑制算法的通频带内抖动功率大小,表征了抖动频谱、探测器积分时间、帧周期和帧间差分背景抑制算法对抖动杂波的影响,对焦平面上每个探测器像元都相同。
4 抖动引起杂波模型
由公式(21)(38)和(39),对于单个探测器像元,帧间差分法的均方根输出为:

根据辐亮度与电子数的关系,则整个焦平面的平均抖动引起杂波强度为:

5 抖动引起杂波模型验证
针对地球静止轨道凝视红外相机,为了验证相机视线抖动引起的杂波模型,考虑在轨影响因素的多样性和测量仪器设备的有限性,首先开展了相机视线抖动特性地面测量实验,基于角位移传感器数据和实际相机参数,分析了相机视线抖动频谱,计算了抖动等效角。然后根据所建立的抖动引起杂波模型,计算了不同背景下的抖动杂波强度。最后以在轨实测图像为背景,通过MATLAB进行抖动条件下的图像序列仿真模拟,将抖动杂波强度的仿真模拟与模型计算结果进行了对比和分析。本文所研究相机的具体参数如表1所示。
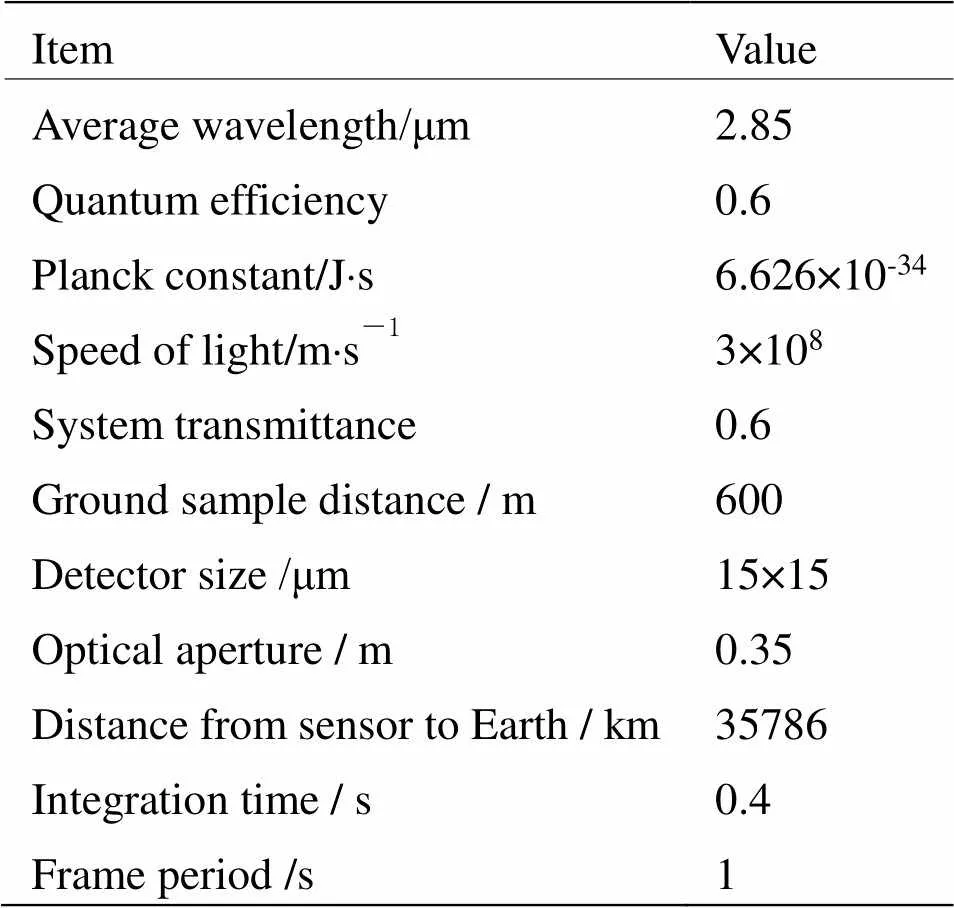
表1 相机参数
5.1 视线抖动频谱分析和抖动等效角计算
相对于低轨卫星相机,地球静止轨道(高轨)凝视红外相机成像积分时间长,更容易受到抖动的影响。根据卫星设计方案,星上活动部件主要包括:数传天线、太阳电池阵驱动机构(Solar Array Drive Assembly,SADA)、动量轮和脉冲管制冷机。数传天线在相机成像时不运动,SADA的基频较低,能量主要集中在0.2~20Hz的低频段内[16]。通过对SADA的扰动测试可知,相比于制冷机和动量轮,SADA的扰动影响较小[17]。因此,本文将制冷机和动量轮作为地球静止轨道凝视红外相机视线抖动的主要扰动源[18],基于相机主镜位置的角位移传感器数据,分析了制冷机和动量轮引起的相机视线抖动频谱。
在轨工作期间,制冷机对红外焦平面进行低温制冷,从而保证探测器的成像任务。当制冷机工作时,高压气体压力的波动和活塞等部件动量的不平衡,均会导致相机视线抖动[19]。在与相机视线垂直的和方向上,制冷机引起的相机视线抖动频谱如图2和3所示。
由图2和图3可知,制冷机引起的相机视线抖动表现为典型的谐波特性,频率为制冷机工作频率和工作频率的倍频。
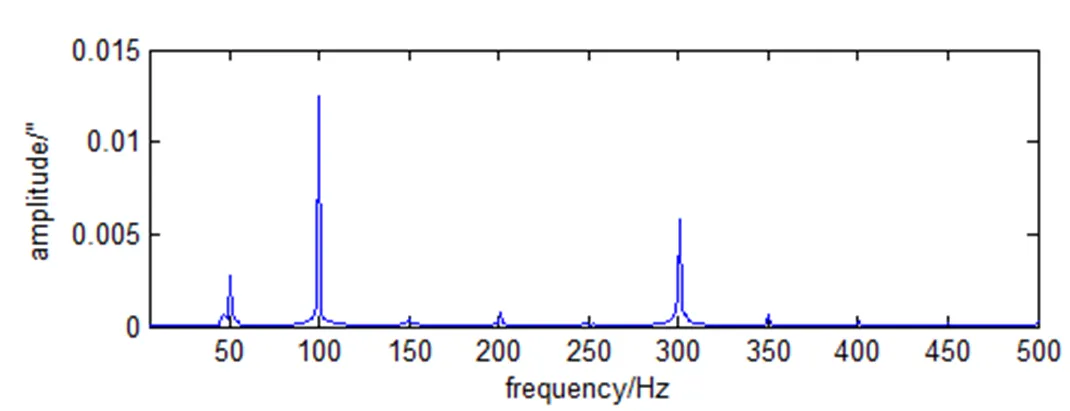
图2 制冷机引起相机视线在x方向上的抖动频谱
动量轮包含高速转动的惯性组件,由于加工误差等原因,惯性组件的质心与实际转动轴不重合,会导致转动不平衡,从而引起相机视线抖动[20]。本文实验中的卫星配备了0.5Nm和0.1Nm两种规格的动量轮,工况为多台动量轮同时开机。在和方向上,动量轮引起的相机视线抖动频谱如图4和图5所示。
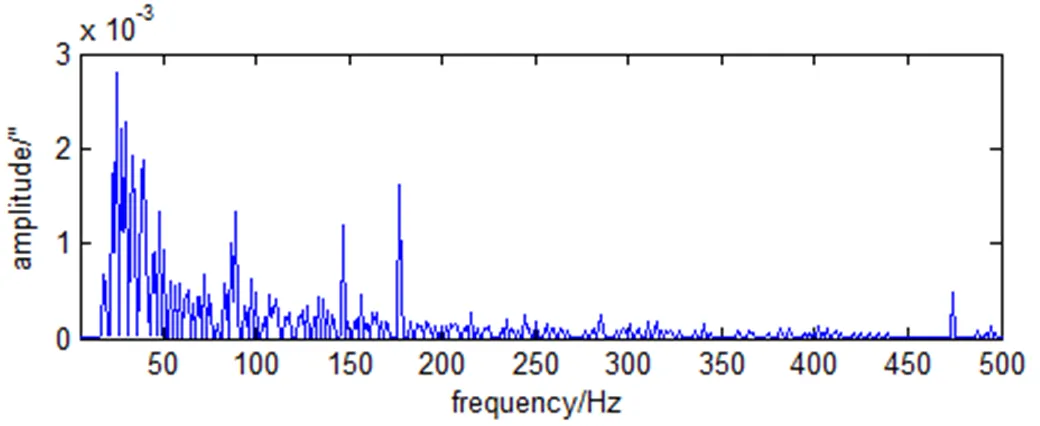
图4 动量轮引起相机视线在x方向上的抖动频谱
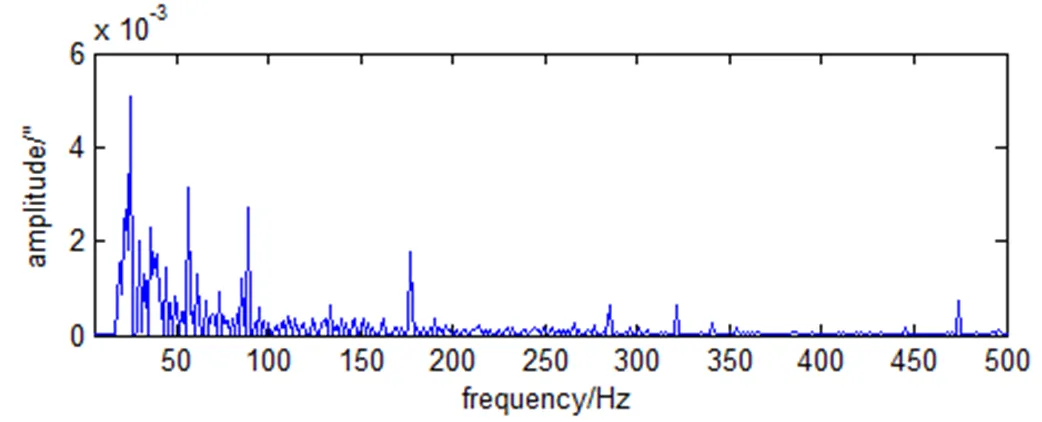
图5 动量轮引起相机视线在y方向上的抖动频谱
由图4和5可知,动量轮引起的相机视线抖动表现为典型的谐波和宽频噪声特性。
根据相机视线抖动频谱,结合实际相机参数,可计算不同扰动源引起的相机视线抖动等效角,如表2所示。
由表2可知,制冷机引起的相机视线抖动等效角比动量轮引起的相机视线抖动等效角小近两个数量级。根据所建立的抖动等效角和抖动引起杂波模型,相比于制冷机,动量轮的扰动为影响抖动杂波强度的主要因素。

表2 不同扰动源引起的相机视线抖动等效角
5.2 仿真模拟和模型计算结果对比
在相同观测条件和系统条件下,根据地球静止轨道凝视红外相机在轨所成图像,选取典型的海面、陆地和云层背景区域,根据5.1节中的视线抖动频谱,生成帧间偏移量,在MATLAB中模拟生成抖动条件下的图像序列;对图像序列中相邻两帧图像做差分运算,统计每个像素灰度值的均方根和整个背景区域的均方根值,并转换为等效辐射强度,以此作为抖动杂波强度的仿真模拟结果。
图6显示了典型的海面、陆地和云层背景图像,图7显示了不同背景的辐射强度梯度分布(单位:W/sr/m),图8显示了不同背景下仿真模拟的抖动杂波强度分布(单位:W/sr)。为了清晰地表征物理量的数值对比和空间分布特征,图7和8采用了二维彩色云图的形式。

图6 不同背景图
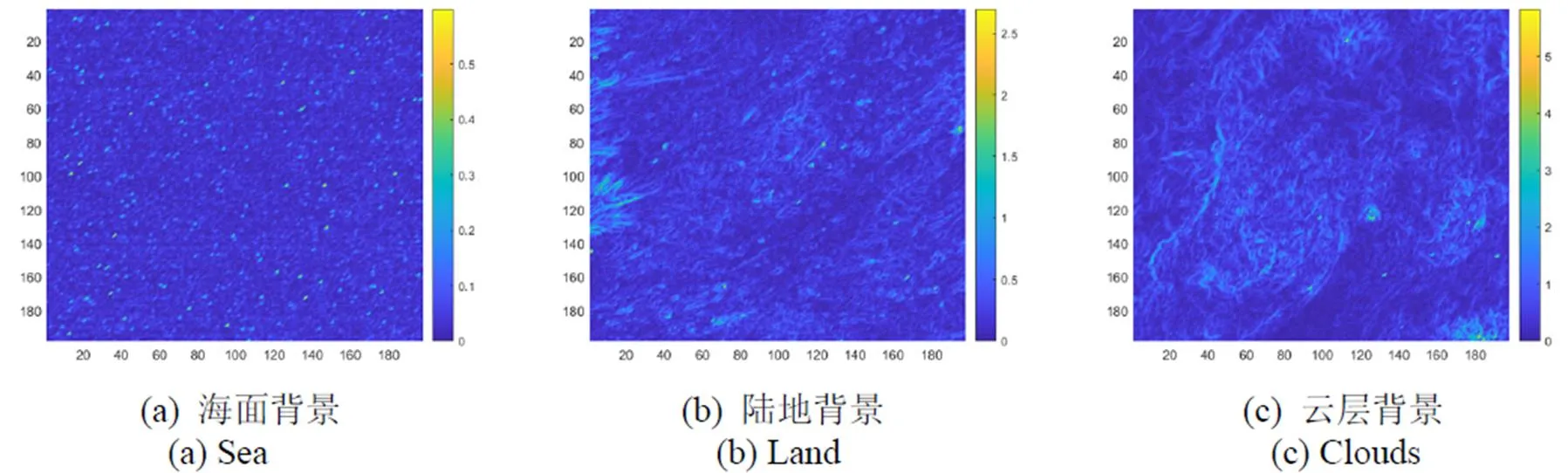
图7 不同背景的辐射强度梯度分布

图8 不同背景下仿真模拟的抖动杂波强度分布

表3 不同背景下的平均抖动杂波强度
由表3可知,不同背景下平均抖动杂波强度的模型计算与仿真模拟结果相近,相对偏差小于15%。在相同系统条件和不同背景下,计算结果符合背景辐射强度梯度越大则抖动杂波强度越大的特性,间接证明了所建立的抖动引起杂波模型的合理性。
所建立的抖动引起杂波模型给出了较合理的抖动杂波强度,与仿真模拟结果具有一致性,可简化描述背景特征、相机参数、相机视线抖动特性与抖动引起杂波的关系,而无需依赖抖动条件下的图像序列仿真模拟,便于系统设计中抖动杂波强度的估计、相机参数的设定和视线稳定度的控制。
6 结论
对于地球静止轨道凝视红外相机,相机视线抖动是时域杂波的重要来源。针对使用功率谱描述背景的杂波模型会导致边缘信息缺失问题,本文探讨了探测器像元上的辐通量梯度与背景辐射强度梯度的关系,建立了相机视线抖动等效角和抖动引起杂波模型。该模型表明:探测器像元的抖动杂波强度与它对应的背景辐射强度梯度成正比,整个焦平面的平均抖动杂波强度与均方根背景辐射强度梯度统计量成正比;因此,抖动杂波强度的分布与背景辐射强度梯度分布相关。本文所建立的抖动引起杂波模型可以计算焦平面上的抖动杂波强度,具有较好的通用性和高效性,可为优化凝视红外相机设计、改进目标检测算法和提高系统探测性能提供依据。
[1] 胡方明, 王晓蕊, 张建奇, 等. 运动效应和背景杂波对红外成像系统性能评估的修正[J]. 红外与毫米波学报, 2004, 23(1): 59-63.
HU F M, WANG X R, ZHANG J Q, et al. Modification of motion and background clutter on IR imaging system performance model[J]., 2004, 23(1): 59-63.
[2] Pohlman R T. Staring mosaic sensor noise sources[C]//, 1976, 95: 138-147.
[3] Pohlman R T. Noise effects in a staring mosaic sensor mounted on a moving platform[C]//, 1977, 124: 10-16.
[4] Rapier J L. Background clutter leakage estimation in a mosaic sensor whose field of view moves relative to the background[C]//, 1977, 124: 23-32.
[5] Rapier J L. Scaling methods for rapid estimation of background clutter leakage[C]//, 1987, 819: 14-21.
[6] Myers K N. Performance of a staring infrared mosaic sensor against a high reflectance background[C]//, 1984: 209-217.
[7] Fraedrich D S. Analytic evaluation of frame difference processing on terrain clutter at MWIR wavelengths[C]//, 1987, 781: 26-32.
[8] Casey E J, Kafesjian S L. Infrared sensor modeling for improved system design[C]//, 1996: 23-34. DOI: 10.1117/12.241947.
[9] Schroeder G, Lee G. Noise spectrum caused by pointing error[J]., 1976, 15(3): 604-605.
[10] Lee G, Fluchel R. Low frequency background rejection techniques[J]., 1977, 13(6): 654-658.
[11] LIANG A C. Statistical modeling of infrared (IR) background due to spacecraft-induced line-of-sight jitter[C]//, 1979, 197: 30-34.
[12] HU R, HO C Q. Performance evaluation of step stare sensor for space-based air vehicle detection[C]//, 1978, 156: 30-35.
[13] 陆大金, 张颢. 随机过程及其应用[M]. 北京: 清华大学出版社, 2012: 112-113.
LU D J, ZHANG H.[M]., 2012: 112-113.
[14] 庞世伟, 潘腾, 毛一岚, 等. 某型号卫星微振动试验研究及验证[J]. 航天器环境工程, 2016, 33(3): 305-311.
PANG S W, PAN T, MAO Y L, et al. Study and verification of micro-vibration test for a satellite[J]., 2016, 33(3): 305-311.
[15] 庞世伟, 郭倩蕊, 贺玮, 等. 某遥感卫星微振动对成像质量影响分析[J]. 航天器环境工程, 2019, 36(1): 47-55.
PAN S W, GUO Q R, HE W, et al. Influence of micro-vibration on image quality of a remote sensing satellite[J]., 2019, 36(1): 47-55
[16] 于登云, 练敏隆, 周峰, 等. 微振动对高轨(GEO)遥感卫星图像质量的影响[J]. 中国科学, 2019, 49(1): 74-86.
YU D Y, LIAN M L, ZHOU F, et al. Influence of micro-vibration on the image quality of a GEO remote sensor [J]., 2019, 49(1): 74-86.
[17] 李林, 王栋, 徐婧, 等. 飞轮组件微振动对高分辨率光学卫星光轴的影响[J]. 光学精密工程, 2016, 24(10): 2515-2522.
LI L, WANG D, XU J, et al. Influence of micro-vibration of flywheel components on optical axis of high resolution optical satellite[J]., 2016, 24(10): 2515-2522.
[18] 白绍竣, 唐绍凡, 聂云松, 等. 空间机械制冷机微振动研究[J]. 航天返回与遥感, 2013, 34(6): 51-56.
BAI S J, TANG S F, NIE Y S, et al. Investigation of Micro-vibration of Space Cryocoolers[J]., 2013, 34(6): 51-56.
Study on Dither-caused Clutter for Staring Infrared Camera in Geostationary Orbit
BIAN Boyuan,ZHOU Feng,LI Xiaoman,JIN Libing,GONG Hui,LIAN Minlong
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
For a staring infrared camera in geostationary orbit, the dither-caused clutter results from the combined effects of background features, camera parameters, camera line-of-sight dither characteristics, and background suppression algorithms. To quantitatively evaluate the intensity of dither-caused clutter, several time-related factors, such as the dither spectrum, detector integration time, frame period, and interframe differential background suppression algorithm are considered. They are combined into a background-independent dither-equivalent angle, and the model of dither-caused clutter is established by multiplying the dither-equivalent angle and gradient statistics of the background radiation intensity. Based on ground measurement experiments on the camera line-of-sight dither characteristics, the spectrum of the camera line-of-sight dither caused by the cryocooler and momentum wheels are analyzed. The dither-caused clutter is also simulated and calculated to verify the theoretical model. The results show that the relative deviation between the calculated and simulated results was less than 15%. This indicates the high versatility and efficiency of the of model, which is suitable for the iterative optimization of camera design.
geostationary orbit, staring infrared camera, dither-equivalent angle, dither-caused clutter
TP391.41
A
1001-8891(2023)07-0775-09
2023-04-03;
2023-04-28.
卞铂渊(1991-),男,博士,研究方向为航天光学遥感技术。E-mail:boyuan_b@163.com。
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
空间科学学报(2020年6期)2020-07-21 05:36:48
新世纪水泥导报(2016年1期)2016-07-01 04:00:00
西北工业大学学报(2015年3期)2015-12-14 13:08:44
天津城建大学学报(2015年5期)2015-12-09 01:26:56
真空与低温(2015年4期)2015-06-18 10:47:26
真空与低温(2015年4期)2015-06-18 10:47:22
遥测遥控(2015年2期)2015-04-23 08:15:22
空间控制技术与应用(2014年2期)2014-04-17 07:30:12
现代防御技术(2014年6期)2014-02-28 18:26:39
