
基于智能网联汽车的自适应巡航系统动力学模型研究
2023-07-30 15:36:20马可
专用汽车 2023年7期


摘要:自适应巡航系统的研究分为直接控制研究和分层控制研究,自适应巡航系统需同时兼顾汽车动力性、经济性及安全性等多个性能指标,分层控制由于具有功能集中及控制方法明确的优点,大多采用分层控制;研究自适应巡航系统的工作过程,首先应建立精确的整车数学模型,本文采用分层控制,上层控制得到车辆期望加速度,下层控制依据上层控制目标参数,决策出期望节气门开度和期望制动力值;同时采用Simlink建模仿真的方法,验证搭建的整车数学模型较接近实车动力学模型。
关键词:智能网联汽车;自适应巡航系统;分层式控制;动力学模型
中图分类号:U467 收稿日期:2022-10-26
DOI:10.19999/j.cnki.1004-0226.2023.07.010
1 前言
汽车行业的蓬勃发展,使现在的汽车保有量逐年上升,智能驾驶及智能交通受到了广泛的关注。通过对汽车的智能控制,采用分层控制方法,实现汽车的自适应巡航模式,首要工作为建立精确的整车数学模型[1]。
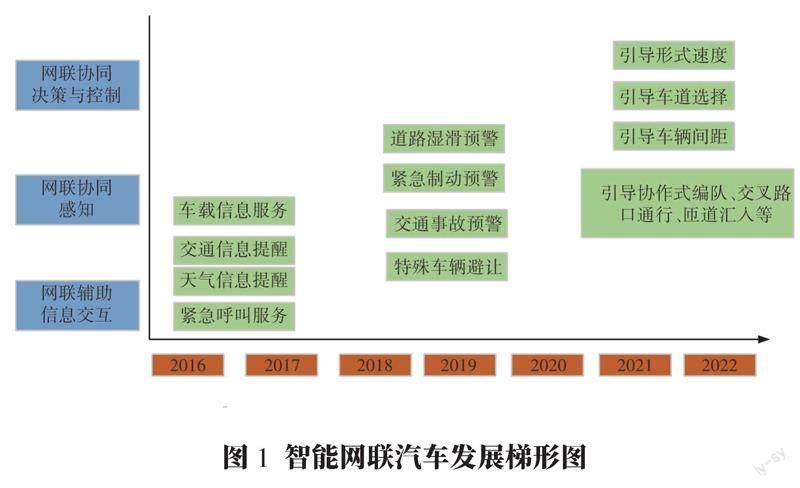
在新一轮科技发展的推动下,智能网联汽车在汽车行业被频繁提起,研究汽车的智能化与网联化成为汽车领域的重要课题。权威机构预测,车辆智能网联化市场规模是非常有潜力的,数据显示,截至2021年全球V2X(Vehicle to Everything)的市场规模超过6 190亿元人民币,而中国的智能网络汽车市场规模也将超过2 100亿元人民币。未来几年,中国市场的大多数产品都会配备智能化、网联化的信息交互设备,由此衍生出来的商业模式也将有翻天覆地的变化。
汽车具有自适应巡航的功能,需要通过车载无线设备与外界环境进行数据信息的交互,伴随着V2X的发展,自适应巡航系统逐渐成为汽车行业研究的热点。文献表明,汽车搭载了自适应巡航系统,不仅可以缩短总的行驶时间,同时可以降低汽车的发生事故的概率,以保证汽车较好的状态行驶,同时也确保车内人员安全。
本文总结了智能网联自适应巡航系统车辆的研究现状,同时指出了研究自适应巡航系统的首要工作为建立精确地整车数学模型,本文采用分层控制,上层控制得到车辆期望的加速度,下层控制依据上层控制目标参数,决策出期望节气门开度和期望制动力值;同时采用Simlink建模仿真的方法,验证搭建整车模型较接近实车系统动力学。本文研究结论为智能网联自适应巡航系统车辆的更一步研究奠定了基础[2]。
2 自适应巡航系统架构设计
目前,汽车主要向节能、驾驶舒适性及交通道路利用率三个方面发展,自适应巡航系统的发展也向其靠拢。其主要控制性能为跟踪性能,即控制本车与前车及后车的相对速度趋于零,但由于自适应巡航系统其跟踪性能、乘坐舒适性及燃油经济性相互影响,未了使车辆在良好的状态下行驶,将其控制目标与工作要求总结如下:
a.跟踪性能:为使车辆有良好的跟踪性能,在车辆行驶工况下,应控制本车与前车的相对速度趋于零,同时也应根据控制策略,确保跟车距离;当前车加速或减速行驶时,控制本车与前车间距及相对速度趋于误差范围内,避免与前车间距过大导致邻车道车辆切入,同时也避免车间距较小发生车辆剐蹭及严重的碰撞。
b.乘坐舒适性:在行驶过程中,为提高乘车人员的驾驶舒适性,自适应巡航系统应使车辆的加速度变化较为平缓,从而减少前倾及推背感。
c.燃油经济性:在跟随巡航过程中,加速度变化率波动较小会使车辆获得良好的燃油经济性,所以应使加速度在合理的范围内变化。
目前,自适应巡航系统控制方法分为直接式控制與分层式控制。直接式控制依据本车获取的与前后两车的行驶信息,同时根据期望车间距离直接决策出下一工作节点所需节气门开度与制动压力。由于自适应巡航系统为非线性系统,在极端工况下会使其控制系统失效。由于搭建精准的数学模型较为困难,为避开使用精准的数学模型,自适应巡航系统大多采用模糊PID控制,根据控制策略,通过控制期望车间距离、节气门开度及制动压力之间的关系,使自适应巡航系统良性工作。通过对比,直接式控制不太适用于自适应巡航系统,所以其目前大多采用分层式控制以达到良好的控制目标,其控制原理如图2所示,其上层控制的目标为依据本车与前后两车的信息交互决策出期望车间距离,基于前面的性能控制目标,决策出下一时间节点所期望获得的加速度;其控制目标为跟踪决策出的期望加速度,即下层控制目标,对加速度跟踪需对节气门开度及制动器的压力进行联合控制[3-4]。
本文采用分层控制方法,设计的自适应巡航控制系统结构图,可分为数据感知层与目标控制层,同时控制层可分为自车控制模型、上层控制器及下层控制器,分别如图3、图4、图5所示,上层控制包括定速度与定车距巡航两种模式,定速度巡航模式为当本车无需跟随行驶时,自适应巡航系统控制本车按照控制策略制定的期望速度行驶;定车距巡航模式为当本车在跟随工况行驶时,需对车间距及加速度进行控制,首先数据感知层获取行驶信息决策出期望车间距,依据决策出的期望车间距,同时监测本车的车速及加速度值的大小,通过控制策略获取最佳期望加速度值;下层控制依据上层控制获得的最佳期望加速度值,同时兼顾期望车距及期望跟踪加速度,即联合控制节气门开度及制动器压力大小。
3 车辆动力学模型
智能交通与智能驾驶是一个复杂的多层次系统,为更好地研究自适应巡航系统,需要对其搭建较为精准的数学模型,以确保更好地比拟实车工作状况。为了较好地与实际路况相吻合,本文设计队列为前后都有来车的多车辆队列,采用Simlink搭建整车动力学模型,同时搭建前后车辆及驾驶路况环境[5]。
在创建车辆动力学模型过程中,可依据车辆型号配置相关参数,其配置构成如图6所示。
本文选取本田思域轿车,发动机功率130 kW,车辆基本参数如表1所示。
在控制过程中,自适应巡航系统将上层控制器决策出的期望加速度转化为对节气门开度及制动压力值的控制,执行机构输入为节气门开度及制动压力值,所以需搭建车辆的纵向动力学模型。在车辆建模过程中,需结合加速及减速两种工况,在加速过程中,发动机基于加速踏板控制的气门开度大小输出相应的转矩,经传动系统传至驱动轮;在减速过程中,制动钳基于制动踏板控制的制动压力值产生摩擦转矩,作用于驱动轮上,迫使车辆减速。为便于将结果输入到搭建车辆逆纵向动力学模型,上层控制的输出量为下一时间节点期望加速度值,即下层控制的输入值,下层控制输出值即控制目标为目标节气门开度及目标制动器压力值。搭建控制模型结构图如图7所示。
a.发动机动力模型。
在对自适应巡航车辆进行动力学分析过程中,驱动轮从发动机获取转矩,使车辆获得驱动力,同时车辆还受到空气阻力、滚动阻力及摩擦阻力等一些阻力,车辆的受力方程为:
[mai=Ft-Fb-F(z)] (1)
式中,[m]为整车质量;[ai]为期望加速度;[Ft]为从发动机传至驱动轮的驱动力;[Fb]为地面作用于车辆的滚动阻力;[F(z)]为其他摩擦力之和。
驱动力表达式为:
[Ft=ητωaωbRcRdrT?=KT?] (2)
式中,[η]为机械传动效率;[τ]为液力变矩器特性参数;[ωa]为液力变矩器涡轮转速;[ωb]为发动机转速;[Rc]为变速器各挡位速比;[Rd]为主减速器速比;[r]为车轮半径;[T?]为发动机输出转矩;[K]为变量。
由上式可推算出发动机输出转矩为:
[Ti=ma+F(z)K] (3)
通过查表法得出期望转矩与相应期望节气门开度关系,如式所示:
[αi=f(Ti,ωb)] (4)
式中,[αi]为期望节气门开度;[f(Ti,ωb)]为逆发动机特性曲线。
所得出的发动机期望节气门开度数学模型如图8所示。
b.制动系动力模型。
车辆处于制动工况时,对车辆进行受力分析,简化车辆受力方程为:
[mai=-Fb-F(z)] (5)
在限定范围内,将制动力与制动压力视为线性关系,设比值为[K1],得制动力矩方程式为:
[Tl+Tfr=K1P] (6)
式中,[Tl]、[Tf]分别为前后车轮制动力矩;[P]为制动管路油压。
可得期望制动压力值为:
[P=mai-0.5CDAρν2-mafK1] (7)
所得到的期望制動压力值计算模型如图9所示。
4 仿真结果
自适应巡航系统下层控制器原理为采用闭环控制策略,精准控制节气门开度及制动压力值,使其趋于期望值,采用PID控制,使加速度迅速收敛,使其在合理范围内变化。以正弦信号为输入,验证本文设计控制策略。仿真结果如图10所示。
通过图10仿真结果可以看出,将期望加速度以正弦信号作为输入,其实际加速度值无限趋近于理想加速度值,同时实际加速度在合理的范围内进行变化,可以认为所设计的动力学模型控制性能良好,为进一步研究自适应巡航系统打下基础。
5 结语
本文针对智能网联汽车自适应巡航系统动力学模型做了如下探讨:
首先运用分层式控制方法,确定自适应巡航系统的控制目标即控制架构方案,同时明确下层控制目标控制参数,建立车辆动力学仿真模型。
下层控制器为自适应巡航系统上层控制器设计提供了基础,本文下层控制器采用闭环控制方法,仿真结果表明实际加速度值和理想加速度值无限接近,同时实际加速度的变化范围正常,可以得出所设计的动力学模型控制性能较好,为进一步推广自适应巡航系统在整车上的使用奠定了基础。
参考文献:
[1]薛杨.基于模糊PID控制的车辆纵向优化CACC系统[D].长春:吉林大学,2015.
[2]许伦辉,黄颖.基于不同安全车距策略的自适应巡航控制稳定性研究[J].科学技术与工程,2016(29):132-140.
[3]陈康.面向车联网的协同自适应巡航控制研究[D].广州:华南理工大学,2017.
[4]王灿,马钧.汽车CACC系统的车头时距策略研究[J].农业装备与车辆工程,2015,2(53):60-67.
[5]苏卫.基于多前车信息的CACC车间时距与上层控制策略优化研究[D].长春:吉林大学,2020.
作者简介:
马可,女,1995年生,助教,研究方向为智能网联汽车自适应巡航系统。
猜你喜欢
商情(2018年25期)2018-07-08 14:16:14
当代经济管理(2018年5期)2018-05-25 07:40:56
中国科技博览(2018年10期)2018-03-28 10:57:42
科技视界(2017年29期)2018-01-18 06:10:26
汽车科技(2017年3期)2017-06-12 12:41:56
内蒙古教育·职教版(2016年11期)2017-01-05 09:52:20
现代经济信息(2016年24期)2016-11-09 05:10:15
电脑知识与技术(2016年7期)2016-05-19 14:19:55
电脑知识与技术(2016年9期)2016-05-18 14:25:25
湖北农业科学(2015年15期)2015-09-09 21:54:48
