机器人辅助椎弓钉固定强直性脊柱炎胸腰椎骨折△
2023-07-26 05:48:22唐六一周维俊
中国矫形外科杂志 2023年14期
林 书,唐六一,胡 豇,万 仑,王 跃,俞 阳,周维俊
(四川省人民医院骨科,四川成都 610072)
强直性脊柱炎(ankylosing spondylitis, AS)是一种进展性风湿类疾病,起病隐匿。未经过系统性治疗的AS 患者,将逐渐出现脊柱小关节的侵蚀、融合,脊柱畸形强直改变[1]。因此,AS 患者胸腰椎骨折的风险大大增加[2],经后路长节段内固定植骨融合术是治疗胸腰椎骨折合并AS 的主要方式之一[3,4]。但由于AS 患者关节突关节结构的紊乱,置钉偏移的风险大大增加,在Yang 等[5]报道的3 例AS 胸腰椎骨折的手术病例中,其中1 例患者术后出现小便功能障碍可能与置钉偏移相关。目前骨科机器人辅助治疗常规胸腰椎骨折的临床疗效良好[6,7],但尚无报道将其用于AS 外科治疗中。本院自2016 年1 月始在强直性脊柱炎胸腰椎骨折患者中采用机器人辅助治疗,现回顾分析采用机器人辅助治疗与徒手椎弓根钉固定胸腰椎骨折合并AS 的病例资料,比较二者临床效果和安全性。
1 临床资料
1.1 一般资料
2016 年1 月—2021 年6 月,对AS 无神经症状的胸腰椎骨折患者15 例行手术治疗。术前影像检查明确损伤部位与程度(图1a~1c)。依据术前医患沟通结果,8 例采用机器人辅助置钉,7 例采用徒手置钉。两组性别、年龄、身体质量指数(body mass index, BMI)、骨密度T 值比较差异均无统计学意义(P>0.05)。本研究经四川省人民医院医学伦理委员会批准,所有患者均知情同意。

图1 患者,男,52 岁。1a~1c: 术前CT 冠状位、矢状位重建和MRI 矢状位显示T11 剪切样骨折,多椎节呈“竹节样”改变;1d: 术中机器人工作站进行置钉规划;1e: 术中机器人辅助下置入导针;1f, 1g: 术后正侧位X 线片示骨折复位良好,内固定位置满意;1h: 术后CT 观察螺钉位置,L1左右椎弓根钉均为A 级。
1.2 手术方法
机器人组:常规全麻俯卧位,消毒铺巾。C 形臂X 线机定位手术节段,常规切开皮肤、皮下组织、深筋膜,直至椎板及关节突关节。在固定节段的上位椎体棘突处安装示踪器。在机械臂末端安装定位标尺于固定节段区域,C 形臂X 线机270°扫描需固定的节段。将数据传输到机器人工作站,进行置钉规划(图1d)。机械臂末端分别安装一级和二级套筒,套筒末端放置在关节突表面,使用电钻顺套筒置入导针(图1e),顺导针攻丝,置入椎弓根钉。在伤椎节段行后路椎板切除减压,且在伤椎上下节段切除部分椎板潜行减压。选择合适长度的钛棒,稍预弯,适当复位加压后连接钛棒,安装螺帽,安装横连。予以横突间植骨融合。放置引流管逐层缝合切口。
在节目的剪辑过程中,视频编辑人员进行了长时间的测试,发现即便出现音频差别很大,例如噪音、干扰等波形,音频对齐工具也能够识别出来,对齐准确率非常高。
在窖泥质量的技术评价过程中,评价指标体系中指标权重和分值的确定关系到整套评价体系的系统性和科学性。目前关于指标权重确定的方法有数十种[3],根据数据来源不同,可以分为主观赋权法、客观赋权法和组合赋权法3类。其中主观赋权法研究比较成熟,它主要有专家调研法、最小平方和法、相对比较法以及层次分析法。本研究采用专家调研法确定各指标权重,结果见表2。
徒手组:常规全麻俯卧位,消毒铺巾。透视定位后,逐层切开皮肤、皮下组织、深筋膜,直至椎板及关节突关节。显露伤椎及伤椎相邻上下各3 个节段,根据椎弓根解剖位,分别开路、攻丝,在透视下调整置钉方向,置入椎弓根螺钉。后续减压、复位等操作同机器人组。
1.3 评价指标
机器人组无神经损伤情况,徒手组1 例患者由于螺钉进入椎管,术后出现下肢疼痛,3 个月后缓解。机器人组肺部感染和泌尿系统感染各1 例,徒手组肺部感染和切口感染各1 例。两组早期并发症发生率无统计学差异(P=0.855)。
1.4 统计学方法
目前经美国FDA 批准的脊柱机器人系统包括Mazor 机器人、ROSA 机器人和Excelsius GPS 机器人。其中Mazor 机器人在脊柱手术中使用最为广泛,包括了第一代SpineAssist 系统、第二代Renaissance系统以及最新第三代Mazor X[9]。天玑骨科机器人是由北京积水潭医院和北京天智航公司合作研发,是国内唯一自主研发,能够开展四肢、骨盆和全脊柱节段的骨科手术机器人。目前已有相关研究证实,天玑骨科机器人辅助治疗在胸腰椎骨折、腰椎退行性疾病、老年骨质疏松压缩性骨折中定位准确,安全性良好[6,7,10,11]。
2 结 果
2.1 围手术期情况
林政资源管理主要是以我国相关法律法规为框架,依法对林业资源进行保护,达到保护生态环境、提高林业资源覆盖率的目的。特别是在当前社会经济快速发展的新形势下,人们在注重提高自身生活水平提升的同时,也对生态环境建设给予高度关注。因此,林业局要充分发挥自身的管理作用,将林政资源管理工作落实到实处,通过林政资源管理方案的实施为生态建设的可持续发展做出努力。对此,本文以面向生态建设的林政资源管理研究为题,对其相关内容作出简要分析与着重探讨。

表1 两组患者围手术期资料与比较
记录围手术期情况。采用恢复完全负重活动时间(临床骨折愈合时间)、疼痛视觉模拟评分(visual analogue scale, VAS)、Oswestry 功能障碍指数(Oswestry dability index,ODI)、日本骨科协会评估治疗分数(Japanese Orthopaedic Association Scores,JOA)评价临床效果。复查胸腰椎CT,根据Gertzbein-Robbins 分类标准[8],评估椎弓根螺钉置入准确性的情况。
两组患者均顺利完成手术。两组围手术期资料见表1。两组手术时间、切口长度、术中失血、住院天数、切口愈合情况和下地行走时间比较差异均无统计学意义(P>0.05)。机器人组住院费用、置钉准确性显著高于徒手组(P<0.05),机器人组术中透视次数和透视剂量明显少于徒手组(P<0.05)。
2.2 随访结果
所有患者均获随访,平均随访时间(11.2±1.1)个月。两组均无再骨折及翻修情况。随访资料见表2,两组恢复完全负重活动时间的差异无统计学意义(P>0.05)。术后随时间推移,两组VAS、ODI 评分均显著减少(P<0.05),而JOA 评分显著增加(P<0.05)。相应时间点,两组间VAS、ODI、JOA 评分比较差异均无统计学意义(P>0.05)。典型病例见图1。
表2 两组患者随访结果(±s)与比较
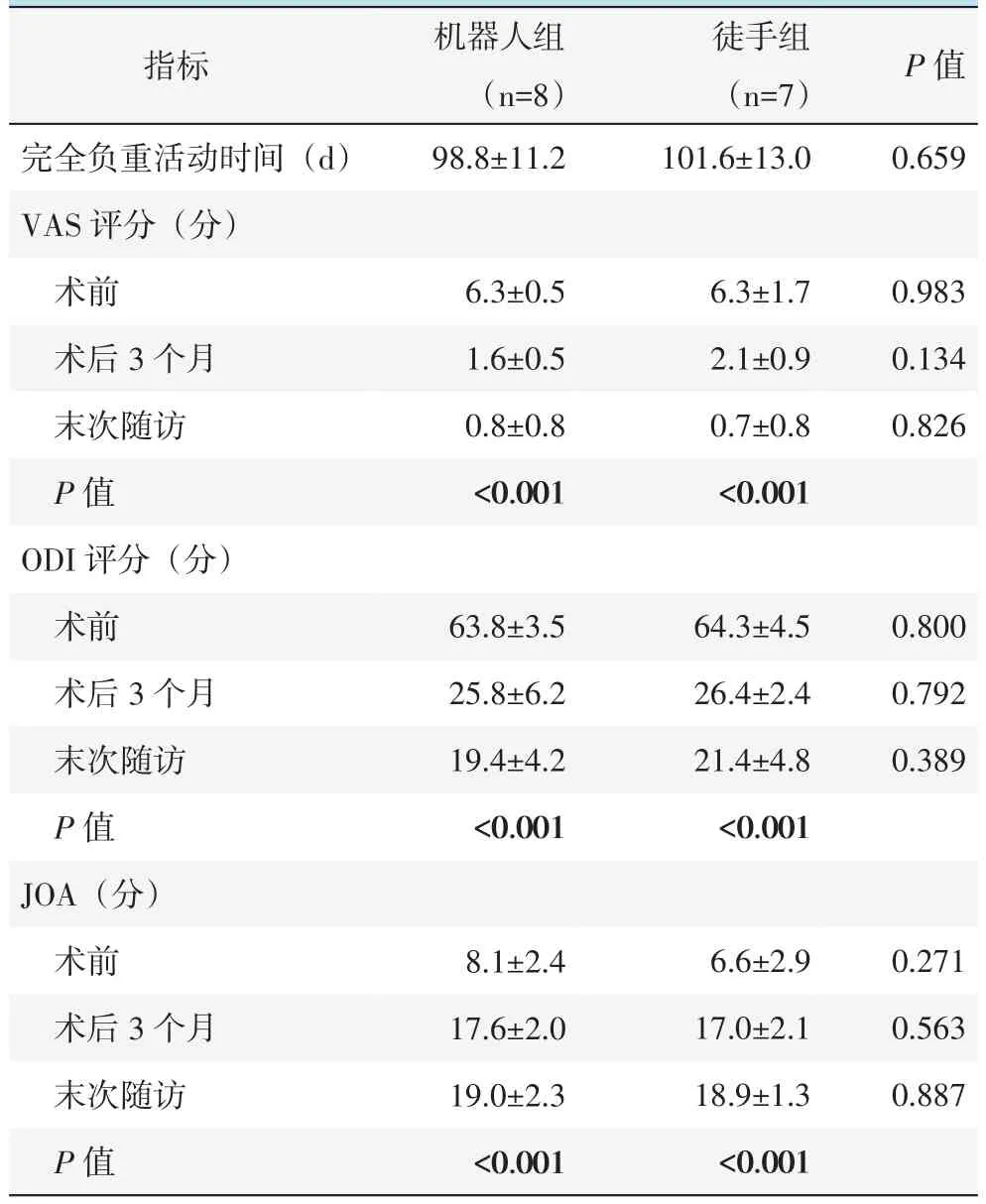
表2 两组患者随访结果(±s)与比较
指标P 值完全负重活动时间(d)VAS 评分(分)术前术后3 个月末次随访P 值ODI 评分(分)术前术后3 个月末次随访P 值JOA(分)术前术后3 个月末次随访P 值机器人组(n=8)98.8±11.2徒手组(n=7)101.6±13.0 0.659 6.3±0.5 1.6±0.5 0.8±0.8<0.001 6.3±1.7 2.1±0.9 0.7±0.8<0.001 0.983 0.134 0.826 63.8±3.5 25.8±6.2 19.4±4.2<0.001 64.3±4.5 26.4±2.4 21.4±4.8<0.001 0.800 0.792 0.389 8.1±2.4 17.6±2.0 19.0±2.3<0.001 6.6±2.9 17.0±2.1 18.9±1.3<0.001 0.271 0.563 0.887
3 讨 论
采用SPSS 22.0 软件进行统计学分析。计量数据以±s表示,资料呈正态分布时,两组间比较采用独立样本t检验,时间点比较采用单因素方差分析;资料呈非正态分布时,采用秩和检验。计数资料采用x2检验或Fisher精确检验。等级资料两组比较采用Mann-whitney U检验。P<0.05 为差异有统计学意义。
未经系统治疗的AS 患者,关节突关节结构紊乱,脊柱僵直改变,准确的入钉点难以确定,徒手置钉损伤神经或血管的风险较高[5],目前尚无天玑骨科机器人在AS 置钉的临床应用报道。本研究中,机器人组置入机器人组置钉准确性显著高于徒手组。
手术的辐射伤害可能导致医患增加潜在的患癌风险[12,13]。AS 关节突关节结构紊乱,入钉点难以寻找,徒手置钉过程中需要反复透视后确定椎弓根开路方向是否正确。如果出现椎弓根内壁或外壁的破损,常常需要耗费大量透视时间进行调整。由于此类手术时间较长,医生一般不会穿戴铅衣,徒手操作时,C形臂X 线机需要反复透视,手术间人员每次需要全部离开手术间,术者反复进出手术室更加延长手术时间。虽然目前关于骨科机器人辅助治疗腰椎退变性疾病是否能减少辐射伤害方面仍具有争议[14,15]。但AS胸腰椎骨折手术本身需要固定的节段长,置钉技术要求高,术中透视量需求较大,因此机器人辅助在本研究中凸显了能减少辐射伤害的优势。
Western blot结果见图 5,对照组 MSCs的H3K27me3蛋白含量显著低于骨坏死组。10 μmol/L GSK126干预后,ONFH组MSCs细胞内的H3K27me3蛋白含量明显降低,接近于对照组水平。三组图像由Image Pro Plus 6.0图像分析软件测定阳性反应物的平均光密度,ONFH组平均光密度为(0.43±0.04),GSK126组为(0.29±0.04),对照组为(0.24±0.03)。结果表明激素性骨坏死组MSCs细胞内H3K27me3蛋白含量明显增多,GSK126能显著抑制其表达。
综上所述,机器人辅助椎弓钉固定治疗AS 胸腰椎骨折可提高置钉准确性高,降低辐射伤害,提高手术安全性。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:27:24
疯狂英语·新读写(2020年1期)2020-04-20 13:30:04
中学生数理化·八年级物理人教版(2018年9期)2018-11-09 01:21:50
动漫星空(兴趣百科)(2018年11期)2018-10-29 02:41:46
海外星云(2017年20期)2017-11-01 22:08:06
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:04
中华骨与关节外科杂志(2016年5期)2016-05-17 06:10:52
现代医药卫生(2014年18期)2014-03-11 19:33:20
中国中医药现代远程教育(2014年20期)2014-03-01 04:31:27
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:23