
某型船身式水陆两栖飞机纵摇试飞技术探讨
2023-07-25 05:18赵磊
科技与创新 2023年11期
赵磊
(中国飞行试验研究院,陕西 西安 710089)
水上飞机是指可以在水面起飞、降落、停泊的飞机,而这其中又包括了既能水面起降又可以陆上起降的水陆两栖飞机,如某型船身式水陆两栖飞机,本文所述的水陆两栖飞机与陆基飞机有很大的不同。
1 水上飞机的设计特点
近年来,随着中国快速应急救援体系的建设和发展,海上交通、远洋捕捞等海洋活动的日趋活跃,水上飞机的需求已经成为中国航空领域的研究热点。某船身式水上飞机具有水陆两栖、速度快、航程远、机动性好等优势,在功能方面有可达性强、搜索范围广、效率高、装载量大等技术优点。提高该类型水上试飞技术是对该类型水上飞机的一种有力支持。
该型飞机为单船身式大长宽比的细长机身外形,舭线以上为常规飞机外形,上单翼、高平尾飞机,装配4 台发动机。舭线以下为船体外形,单断阶V 形船体。机身前半段中部设置抑波槽抑制水面喷溅机体。为了满足水陆两栖功能,在去掉浮筒设计思路的情况下,设计3 点式起落架,主起落架设置在机身后部,前起落架收起后隐藏在船体内部。图1 为典型的船身式水陆两栖飞机三视图。

图1 船身式水陆两栖飞机三视图
据统计,水上飞机飞行各阶段中,水面滑行、水上起飞、着水阶段事故在整个水上飞机飞行过程中占80%,所以水面运行的安全性需重点关注。根据该型水上飞机的主要作业任务和运行特点,该船身式水陆两栖飞机主要任务区为灭火任务型和海洋救援型,其中灭火任务型水面汲水任务和海洋救援型海面降落,都需要水面降落,因此对降落技术提出了高要求,研究水上飞机着水技术和相关着水风险是确定该型飞机安全性的必备要求。
2 纵摇的产生和风险分析
纵摇是水上飞机一种有节奏的俯仰运动,不正确的滑水姿态会引起这种循环周期的振动,这种振动会稳定增加振幅,直到退出这种错误的姿态重新建立新的正确的俯仰姿态。图2 为一种纵摇后姿态没有修正,导致纵摇振幅增加的情况。

图2 无修正纵摇后飞机的振荡
纵摇一般会在2 种情况下发生:一种是水面滑行时机头过低,小波峰或机头产生的水压会在机头积累,随之会产生一个较大的波峰,当波峰足够大,飞机会骑在这个波峰上,使机头上仰,该波峰也会随之向机身后推移。随着波峰向后推移经过断阶位置,飞机会产生一个突然前倾低头的动作,如果不及时控制住飞机前倾低头,飞机头部会入水从而在机头位置产生一个新的波峰,造成飞机的振荡,如果不及时控制,这种振荡加剧,飞机机头可能入水,造成飞机损坏或倾翻。第二种纵摇是在波峰经过断阶位置时姿态过高导致的。飞机尾部压力过大从而使飞机整体低头力矩过大而没有及时控制,飞机也会发生这种纵摇振荡,也有可能比小姿态滑行更早产生纵摇,从而以一个较大的迎角离开水面,导致飞机有可能产生失速再次掉入水中。而该型飞机还有一种情况会导致纵摇,该型飞机具有投、汲水功能,在水面滑行汲水时,汲水斗会放出进行汲水,由于汲水斗处于船身下部、水面以下,所以会产生一个较大的阻力,这种低头较大的俯仰力矩会使滑水姿态发生变化,如果飞行员没有及时调整飞机姿态,则飞机机头下偏就可能产生纵摇。
需要注意的是,纵摇的发生会对飞机机体产生极大的危害,特别是在涌浪情况下的飞机纵摇。在发生纵摇后,一定要及时减缓纵摇的幅度直至纵摇消失。而且对于任何造成纵摇的原因,如果这种运动让机组感觉不舒服,一定要及时制止。
3 纵摇的改出
纵摇的产生原因是水上飞机在水面滑行时机头过高和过低,所以对于纵摇的改出,一种是通过操纵改变飞机的俯仰姿态退出纵摇区间,另一种就是降低飞机能量,使其纵摇的能量降低,从而不产生更大的振荡振幅。在水上飞机产生纵摇后的操纵过程中,必须施加和维持反压,稳定飞机姿态,制止纵摇,每个飞行员必须了解该类型飞机在水面滑行时正确的俯仰姿态和飞机质量、构型、重心位置变化后飞机纵摇区间的变化,并了解这些变化对飞机特性产生的影响,如前重心会增加飞机纵摇的可能性。
图3 为该型机一次水上纵摇的产生改出数据。从图中可以看出,飞机在接水前姿态已经很大,在接水后,由于接水面处于断阶后位置,飞机有一个强烈的低头力矩,从而造成飞机产生了纵摇的周期振荡,最大时飞机的过载达1.6g,如果不及时处置,飞机这种纵摇的趋势还会持续。

图3 水上飞机的纵摇及改出
从图中还可以看出,在发生纵摇后,飞行员改变俯仰姿态的同时收油门,一方面,让飞机姿态回归到合理的姿态区间远离纵摇区;另一方面,飞行员及时收光油门,减小飞机的振荡能量,从而让飞机在纵摇状态下很快稳定。从这次改出纵摇可以看出,改出纵摇的方法就是带杆保持姿态在合理的区间和及时收油门减小功率,这2 个操纵方法可以在飞机触水后出现纵摇时很快稳定下来。可见纵摇的关键点是能量的消散,尽快地消散纵摇的能量,防止其持续的能量发展,是改出纵摇的关键。
飞行员必须学习并练习起飞、滑行和着陆过程中的每一种纵摇,直到能在各种姿态下得到合适的俯仰角。而设计飞机时,应给定大于或小于这些俯仰姿态的限制。由于飞机质量、构型、重心的改变也会相应地改变飞机的纵摇姿态限制。质量的增加,改变了飞机的吃水深度,俯仰姿态限制会发生改变;构型改变时,飞机的俯仰姿态也会改变,其纵摇姿态限制随之也发生改变,低速时,限制变小,高速时,限制随之变大;重心发生变化时,相对来说,后重心会增加纵摇俯仰角的上限,尤其在着陆阶段。飞行员需要掌握每一种状况下飞机本体变化所带来的纵摇限制的变化,并在不同的变化情况下进行训练,从而熟练地掌握纵摇特性。
4 纵摇的试飞策略和方法
关于水上飞机试飞纵摇的操纵特性,在CCAR-25部里相关规章有明确的说明,如在CCAR-25.231(b)中,有“必须确定保证安全滑行、起飞和着水的最不利的水面条件”的说明,在CCAR-25-239 中,有“应在最不利的质量和重心组合情况下研究这些特性”“不应有过分的海豚运动趋势,为控制海豚运动,不应要求特殊的技巧和机敏动作”的说明。
实际试飞中,确定纵摇边界是十分重要的试飞科目,风险很高,合理试飞方案的确定,能有效地规避风险。随着该型水上飞机试飞进程的展开,研发阶段的纵摇边界试飞势在必行。审定时,只要演示起飞着陆阶段没有明显的纵摇发生即可,所以摸清该型飞机的试飞纵摇边界,对于掌握该型飞机纵摇特点及控制风险至关重要。根据对水上飞机水面滑行纵向稳定性的分析,纵摇特性的试飞,主要就是确定水上飞机纵摇的上边界和下边界的试飞,如图4 所示。在制定试飞方法时,应根据上下边界不同情况制定不同的试飞标准。
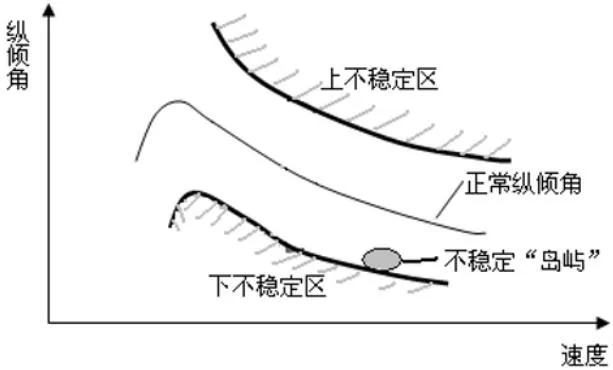
图4 纵摇的上边界和下边界
4.1 纵摇上边界试飞
纵摇的上边界试飞可以采用等速法和加速法进行,步骤如下:①试飞前飞行员确认飞机操纵状态及水舵极限位置,保证飞机状态良好。②在指定区域,确认飞机试验路线,保证水上滑行操纵正常。③正常执行标准起飞程序,将油门前推至起飞位置,向后带杆至后止动位,操纵飞机按既定滑行方向滑行。④飞机滑行速度到达阻力峰位置后,操纵飞机控制飞机俯仰状态至断阶滑行位置,同时横向操纵飞机保持机翼水平,过程中控制飞机两边浮筒不触水;断阶滑行方向始终保持与机头方向一致,过程中不可出现明显的侧滑现象。⑤当滑行速度到达预定速度时,带杆操纵飞机姿态至预定值,同时收油门至合适位置,保持飞机速度不变或缓慢增速滑行。⑥等待飞机出现明显纵摇时,立即收油门至慢车位,带杆至后止动位,直至飞机地速减小至合适区间。⑦如果飞机离开水面且距水面高度并不高,可收油门至慢车位,但不能盲目带杆至最大位;此时如按上述操纵方法,飞机在触水时极有可能发生纵摇,这时需先操纵飞机至稳定姿态区间,待飞机明确触水后,再带杆至操纵后止动位,直至飞机速度减小至合适区间。⑧如在此试验期间,飞机意外起飞,且距水面距离较高,则不能盲目收油门,容易造成着水时候重着水,造成飞机跳跃;此时,机组应严密配合,视情况收油门控制下沉率、飞机姿态和速度,稳定着水。⑨以不同的速度和姿态重复以上试验步骤直至确定纵摇上边界。
4.2 纵摇下边界试飞
纵摇下边界试飞步骤如下:①试飞前飞行员确认飞机操纵状态、水舵极限位置,保证飞机状态良好。②在指定区域,确认飞机试验路线,保证水上滑行操纵正常。③正常执行标准起飞程序,将油门前推至起飞位置,向后带杆至后止动位,操纵飞机按既定滑行方向滑行。④飞机滑行速度到达阻力峰位置后,操纵飞机控制飞机俯仰状态至断阶滑行位置,同时横向操纵飞机保持机翼水平,过程中控制飞机两边浮筒不触水;断阶滑行方向始终保持与机头方向一致,过程中不可出现明显的侧滑现象。⑤当滑行速度达到预定速度时,推杆操纵飞机姿态至预定值,同时收油门至合适位置,保持飞机缓慢减速滑行。⑥等待飞机出现明显纵摇时,立即收油门至慢车位,控制飞机姿态在合理区间,直至飞机地速减小至合适区间。⑦如果在过程中飞机离开水面且距水面高度并不高,可收油门至慢车位,但不能盲目带杆至最大位;此时如按上述操纵方法,飞机在触水时极有可能发生纵摇,这时需先操纵飞机至稳定姿态区间,待飞机明确触水后,再带杆至操纵后止动位,直至飞机速度减小至合理区间。⑧如在此试验期间,飞机意外起飞,且距水面距离较高,则不能盲目收油门,容易造成着水时候重着水,造成飞机跳跃;此时,机组应严密配合,视情况收油门控制下沉率、飞机姿态和速度,稳定着水。⑨以不同的速度和姿态重复以上试验步骤直至确定纵摇下边界[1]。
纵摇边界试飞的目的是确定纵摇上边界和下边界,纵摇上边界和下边界应根据地速给出俯仰姿态的安全范围。所以对试飞数据进行分析时应首先判断纵摇出现的标准,然后根据测试传感器得到出现纵摇的地速,最终绘制纵摇边界曲线。
需要强调的是,可控的纵摇和不可控的纵摇之间的明确界限很难界定,飞机在静水环境下滑行,纵摇幅值小于2°时为稳定,纵摇幅值大于2°为不稳定,纵摇幅值等于2°时为中立稳定。另外,由于水上飞机受浪高影响比较严重,所以纵摇试飞都应该在浪高小于0.2 m 的条件下进行。风速、个人操纵的影响也对纵摇后期数据的精确性有很大影响,不能一概而论,俯仰姿态的振荡是由操纵引起还是一种自然振荡要明确。
5 结论
水上飞机的纵摇稳定性是水上飞机起降阶段重要的评价指标,其稳定性的优劣对飞行员的操纵有着极其显著的影响,是飞机纵向稳定性优劣的标准之一,因此一架设计制造良好的水上飞机应该具有良好的纵摇稳定特性。目前中国即将进行该型水陆两栖飞机的适航取证试飞,纵摇稳定性试飞也即将拉开,本文即是该科目稳定试飞的一个思考。
猜你喜欢
国画家(2021年4期)2021-10-13
快乐语文(2020年12期)2020-06-02
水利规划与设计(2020年1期)2020-05-25
小学阅读指南·高年级版(2020年3期)2020-04-01
青少年科技博览(中学版)(2017年1期)2017-03-02
中国医药指南(2016年1期)2016-07-11
现代企业(2015年6期)2015-02-28
物理与工程(2010年3期)2010-03-25
学苑创造·A版(2009年6期)2009-12-07
