
泵喷推进器水动力性能实验研究
2023-07-19 08:36秦登辉黄桥高潘光李福正韩鹏
西北工业大学学报 2023年3期
秦登辉, 黄桥高, 潘光, 李福正, 韩鹏
(1.西北工业大学 航海学院, 陕西 西安 710072; 2.西北工业大学 无人水下运载技术重点实验室, 陕西 西安 710072)
泵喷推进器(pump jet propulsor,PJP)是近年发展起来的一种新型组合式水动力推进器,由转子(又叫叶轮、旋转叶栅)、定子(又叫导叶、静止叶栅)和导管三部分组成。转子是PJP的动力部件,定子和导管为辅助部件,转子和定子位于轴对称环形导管中。根据定子和转子的相对位置可以将PJP细分为2类:定子布置在转子的前面称为“前置定子式”;定子布置在转子的后面则称为“后置定子式”。前置定子可以预旋来流,改善转子的工作条件,从而提高转子推进效率,并有效降低辐射噪声。而后置定子可以回收转子尾流中的旋转能量,提高推进器总效率,但是其噪声也更高。目前鱼雷上通常采用“后置定子式”PJP[1-2],而潜艇上大多采用“前置定子式”PJP[3]。
近年来,随着声呐这一主要水下探测手段在高精度、远距离等方面能力的快速提升,潜艇在水下航行时被暴露和打击的可能性大大提升,严重威胁了潜艇的生存能力和战斗力。因此,前置定子式PJP以其优异的低噪声性能,广泛应用于潜艇,是当前海军领域研究的热点。
实验测试是研究PJP流场特性的一项重要手段。Cormick等[4]在Garfield Thomas Water Tunnel对一型后置定子式PJP进行了实验测试,对不同进速系数下PJP的推力系数和扭矩进行了讨论。Suryanarayana等[5]在印度海军科学技术实验室的空泡水洞中对某型后置定子式PJP进行了不同工况下的空化临界系数测试。随后,其分别在风洞[6]和水洞[7]中,对其各项流体动力系数和速度场进行了测试。上述实验均是针对后置定子式PJP,实验数据较少且模型的参数不详,无法进行进一步对比研究。而前置定子式PJP的水动力实验数据更为少见。秦登辉等[8-11]对一型前置定子式PJP的空泡水筒实验数据进行了介绍和数值验证,但实验数据仅讨论了转子的力和力矩系数,数据稀少。舒礼伟等[12]在中国船舶科学研究中心大型循环水槽中应用微型脉动压力传感器对某型前置定子式PJP的脉动压力进行了测量。受到测量条件的限制,主要对不同水速和桨叶参数下的导管脉动压力进行了测量。孙小帅等[13]在中国船舶科学研究中心的拖曳水池中对某型安装了2个后置定子式PJP的三体船进行了自航试验,对PJP的推力和扭矩系数进行了测量。
除了实验研究,近年来越来越多的学者使用数值模拟的方法来对PJP进行研究。在前置定子式PJP水动力性能研究方面,主要采用的研究方法有面元法和计算流体力学(computational fluid dynamics,CFD)。王国强等[14-15]、苏玉民等[16]及刘业宝[17]基于面元法和一些改进尾涡模型对PJP定常及非定常的水动力性能进行了预报。此外,更多的学者采用CFD方法来对PJP的流场进行模拟。饶志强等[18-20]采用商用计算软件FLUENT对PJP的定常和非定常性能进行了数值预报,并对定子参数对推进器性能的影响进行了研究。张凯等[21]基于SSTk-ω湍流模型和STAR-CCM+软件对某型九叶定子四叶转子PJP进行了数值模拟,对不同定子参数、导管攻角等对PJP水动力性能的影响进行了讨论。Yu等[22-23]对不同转子叶梢间隙尺寸和不同定子参数对某型前置定子式PJP水动力性能、压力分布、流线等进行了对比。于丰宁等[24]基于CFD方法对PJP在敞水/SUBOFF潜艇尾部伴流状态这两种工况下叶片的非定常激励力进行了讨论。文献[25-32]均基于CFD,采用大涡模拟/分离涡等模型,对PJP空化性能、转子梢隙流场、各个部件非定常激振力、涡结构的三维形态和形成机理等进行了一系列研究。对于以上这些数值模拟研究来说,与实验值进行对比以验证数值模拟方法的准确性是必不可少的,因而业内急需较为精确和完善的PJP实验测试数据。
综上所述,PJP以其临界航速高、辐射噪声低的特点被应用于世界各国的新一代安静型潜艇和鱼雷上,其特殊的应用背景对其水动力、空化和噪声的实验研究提出了很大的需求。但目前对PJP,尤其是前置定子式PJP的水动力实验研究较为匮乏,数据较少,使得PJP水动力性能和流场特性等尚未得到充分的实验解释。
本文对一型前置定子式PJP,在空泡水筒中进行了水动力系数和流场PIV实验测试,以加深对PJP水动力性能和流场特性的理解,并可以为相关领域的研究人员提供一个基础模型及详细的实验数据,供学者们进行进一步研究。
1 实验模型和设备
1.1 实验模型
本文实验对象为一型前置定子式PJP,其是为某型水下航行器设计的。根据ITTC建议的实验准则及中国船舶研究中心的实验指导,对模型进行相似准则分析。原模型是为某大型水下航行体设计的前置定子式PJP,实际转子直径Dfull=3.328 m,根据实验段的尺寸限制,选择缩比比例为1∶20,也就是实验模型转子直径Dexp=0.166 4 m。螺旋桨模型的几何形状保证了与全尺寸模型的几何相似准则。PJP实验模型如图1所示,主要由一个九叶定子(如图1a)所示),一个七叶转子(如图1b)所示),一个导管(如图1c)所示)组成。其中,定子和转子材质是铝合金,导管材质为有机玻璃。此外,需要指出,还加工了相应的定子轮毂、转子轮毂,以及尾流冒模型作为光轴模型,在实验测试中进行力的修正。

图1 泵喷推进器实验加工模型

为了后文讨论方便,对于PJP,定义绝对坐标系:坐标原点选在转子的几何中心,其旋转轴方向作为Z轴,来流方向设定为Z轴正方向,Y轴正方向为模型正上方,而X轴按照右手法则进行判定。
缩比后的模型转子叶片直径D=166.40 mm。以下全文中均使用转子叶片直径D来进行归一化,例如:螺距比P可以归一化为p/D。定子叶片的平均直径比转子略大,为193.50 mm。转子和定子叶片的详细参数如表1所示。其中,毂径比为转子和定子中点处的轮毂直径与转子直径D之比,盘面比为转子/定子叶片在来流方向的正投影面积与转子叶梢圆面积之比。而对于转子和定子,均选择在0.7倍的转子半径处剖面的叶宽和最大厚度作为特征值。2个叶片的后倾角均为0。导管直径D为220.00 mm,长度Ld为177.00 mm,转子叶顶与导管内壁的间隙为1 mm。导管内表面和外表面的参数见表2,其中,yinner为导管内表面的半径值,而youter为导管外表面的半径值。

表1 转子和定子参数表

表2 导管参数表
1.2 实验设备
泵喷推进器的水动力测试实验在中国船舶舰船研究中心的空泡水筒中进行。空泡水筒的相关参数为:试验段长度为3.20 m,直径为0.80 m,空泡水筒的水流速度范围为3.00~15.00 m/s,转速调节范围为正流下700.00~4 000.00 N·m。空泡水筒装置如图2所示。

图2 空泡水筒
本实验中用到的设备主要有定子测力天平,螺旋桨动力仪和PIV(particle image velocimetry)流场测试系统。其中定子测力天平固定在定子之前,用来测试定子和导管的合力和合扭矩,而转子的力和扭矩通过螺旋桨动力仪输出。动力仪推力量程为4 000 N,测量精度为0.2%,扭矩量程为200 N·m,测量精度为0.2%,转速量程4 500 r/min,精度0.1%。定子天平推力量程为500 N,测量精度为0.1%,扭矩量程为30 N·m,测量精度为0.1%。此外,一套2-D PIV系统被用来测试流场。PIV激光器的型号为中国镭宝公司的Vlite-Hi-527,高速相机型号为Phantom公司的LAB310。
2 实验测试
2.1 水动力测试
在水动力测试中,光轴模型作为水动力的基线,用来扣除基础的轮毂以及实验中的其他阻力。安装光轴后的测试系统如图3a)所示。而对于泵喷推进器,定子测力天平位于定子正前方,固定在螺旋桨动力仪外侧的轴套上,外表装配有导流罩,保证流线型过渡到定子模型,以保证来流的均匀性。导管是由9个螺钉固定在定子上,导管和定子的合力和合扭矩即由定子测力天平输出。PJP模型在水洞实验段中的装配图如图3b)所示。此外,需要提到,实验模型在转子和定子根部处存在由于加工产生的根部圆角,圆角尺寸为r=0.5 mm。在实际实验测试中,环境条件为:水温为19℃,室温为20.1℃,空气相对湿度为67%,压力为1.02×105Pa。

图3 模型安装图
2.2 PIV流场测试
PIV测试系统图如图4所示。PIV的激光源通过水洞底部平板玻璃照射螺旋桨尾部中截面平面(Y-Z平面),PIV拍摄的区域集中在导管之后320 mm内,也就是约2D之内的范围。需要提到,在导管尾缘处,由于有机玻璃对光的折射和反射,PIV无法拍到导管内部和导管附近的流场,但可以得到较为详细的尾流场数据。

图4 PIV测试系统图
3 实验结果讨论
3.1 敞水性能
对于PJP,定义水动力系数如表3所示,其中,Tr,Ts,Td分别为转子、定子和导管的推力;Qr,Qd分别为转子、定子和导管的推力。在实验测试中,定子和导管是通过螺钉固连的,所以定子和导管的力或力矩无法被区分开。n是转子的转速(r/s),V是远场来流速度(m/s),D是转子叶片直径,ρ是流体的密度(kg/m3),实验工况:固定转速为1 200 r/min,通过调节来流速度大小改变螺旋桨进速,实验测试泵喷的工况范围为进速系数J=V/(nD)=0.5~1.2,n=20 r/s。此外,本文中的泵喷推进器实验模型和实验数据均可通过邮件方式与作者联系获得。
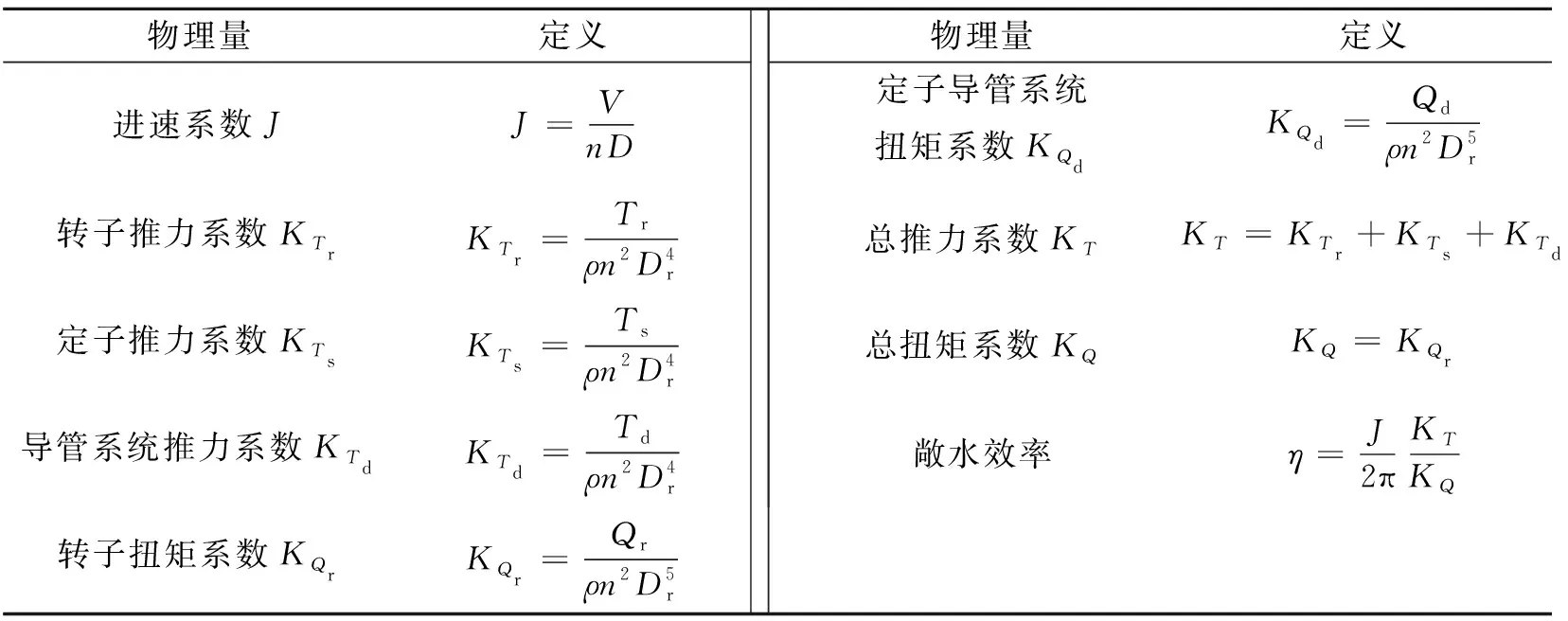
表3 泵喷水动力系数定义
测试得到的水动力系数如图5所示。需要提到,图中的水动力系数结果均为水洞阻塞效应修正后的最终结果,推力和扭矩的测试值均取5次实验的平均值作为最终结果。本次实验中,推力系数的不确定度约在3%~5%,扭矩系数的不确定度约在1%~3%。可见,泵喷推进器的总推力系数KT基本随着进速系数J的增大而线性减小,而转子的扭矩系数10KQr也随着J的增大而逐渐减小,只是其下降的斜率逐渐增大。泵喷推进器的效率随着J的增大先增大后减小,在J=1.0处达到最大,为61.91%。

图5 泵喷推进器水动力系数测试结果
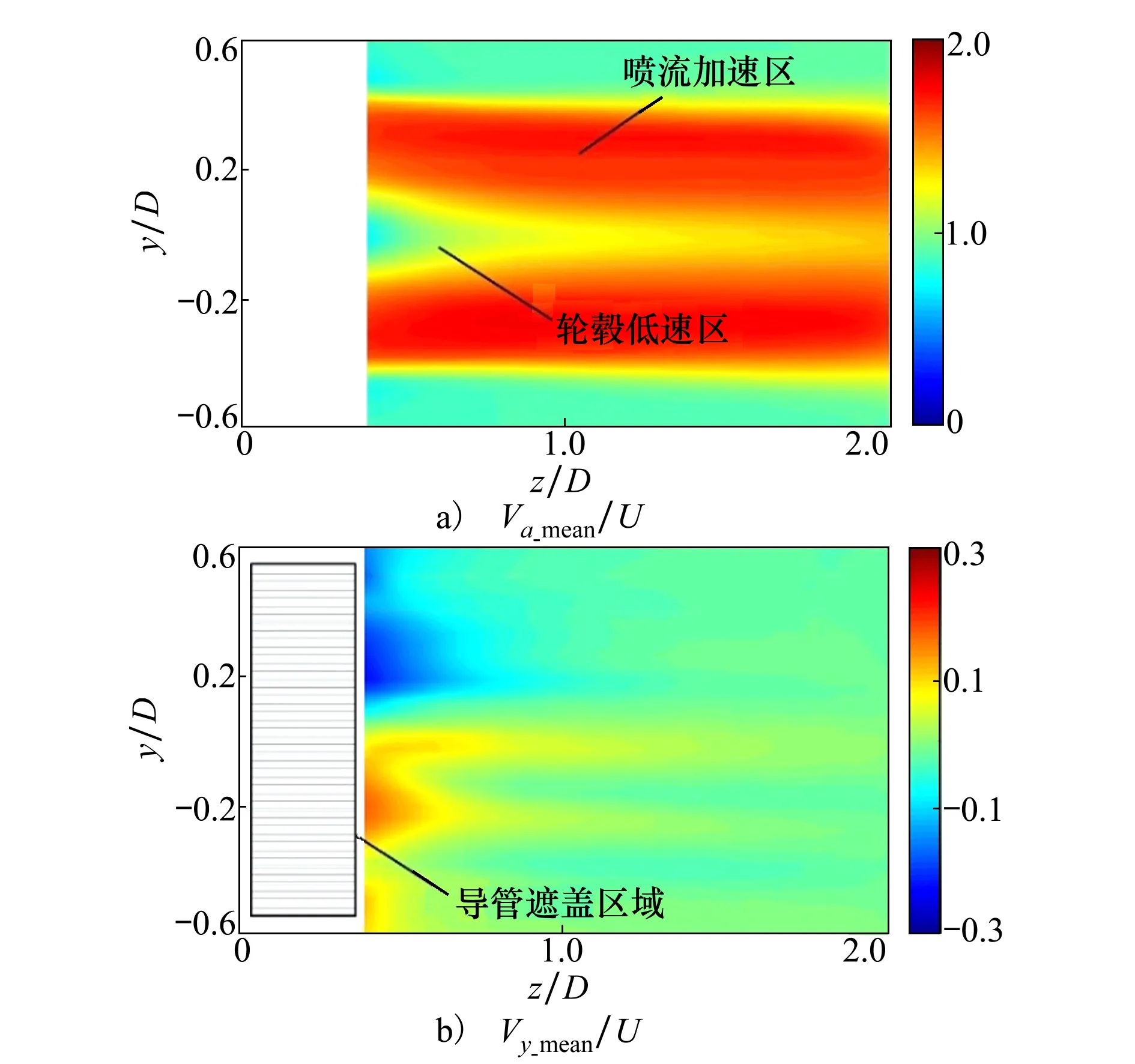
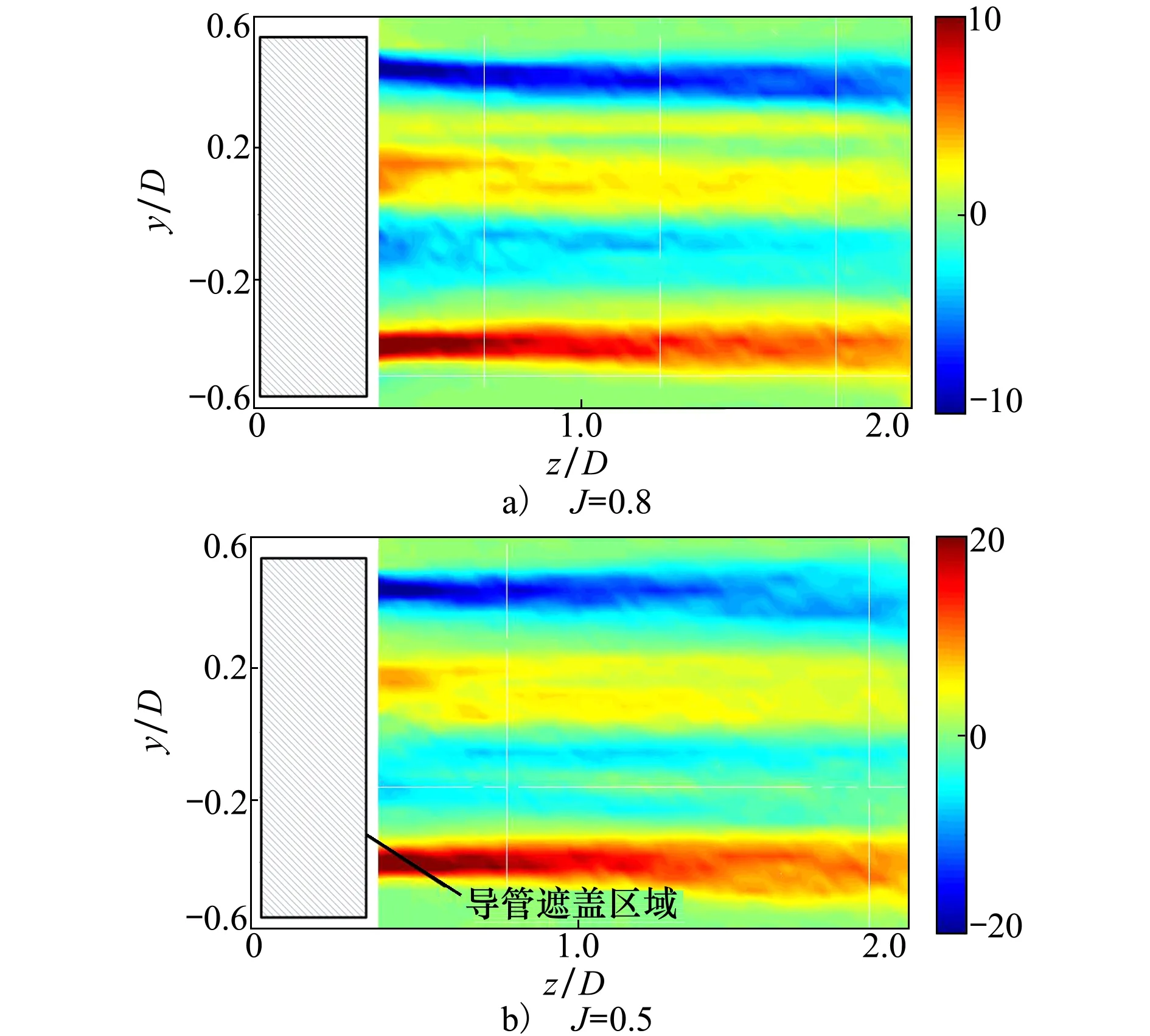
更进一步的,图6a)对比了泵喷推进器的推力组成。其中,可以看到,在实验测试的0.5 图6 转子、定子导管的推力和扭矩对比 在这里,定义泵喷推进器的转子推力比τp为转子推力Tr与总推力T之比 (1) 当τp<1时,说明此时导管/定子导管系统提供的是推力。此时,螺旋桨的部分推力转移到导管上,螺旋桨的一部分尾涡变成了导管的附着涡,进而引起了导管上的环流,这也是导管推力的来源。 对于本文测试的泵喷推进器,在J>0.5时,推力比τp>1(由图中数据计算得0.5 根据秦登辉等人的研究[8],某型前置定子式泵喷推进器在J=0.6~1.4范围内的τp=1.15~4.26,而某型后置定子式泵喷推进器在J=0.6~1.4范围内的τp=0.60~0.78。因此,从推力分布上来说,后置定子式泵喷推进器的推力分布更加均匀,而前置定子式泵喷推进器的推力基本上由转子提供,这也是前置定子式泵喷推进器的劣势之一。 图6b)对比泵喷推进器的扭矩组成,由于定子和导管的扭矩为负值,因此图中以-10(KQs+KQd)代替。如图所示,随着J的增大,转子扭矩系数值逐渐减小,而定子导管系统扭矩系数的绝对值反而逐渐增大,两者在J约为0.88时相等。 总的来说,在泵喷推进器最佳效率点处附近,此泵喷推进器的合扭矩基本接近0,这也是泵喷推进器相比于传统单桨/导管桨的优势之一,即推进器的合扭矩接近0,更有利于航行器的操纵性和稳定性。 对泵喷推进器在J=0.8和J=0.5(N=1 200 r/min)这2种工况下的流场进行了PIV测试。J=0.8,某一个瞬时时刻时,泵喷推进器在y-z平面内的瞬态轴向速度和y方向速度的PIV测试结果如图7所示。 图7 PJP在J=0.8时,瞬态速度云图实验测试结果 首先观察轴向速度云图,可以看到,在0 相比于轴向速度,泵喷尾部y方向速度的PIV测试结果显得更加混乱。其主要原因是,泵喷推进器尾流的轴向速度较大,而y方向速度值较小,因而PIV系统对于y方向速度值的分辨率较差。因此,数值模拟结果与实验对比时,建议选取轴向速度作为定量对比对象。大体趋势上,在y轴正方向一侧的Vy速度分量值为负,而y轴负方向一侧的Vy值则为正值。 而对泵喷在20个旋转周期的PIV结果进行平均之后可以得到泵喷推进器尾流场周期平均速度云图,如图8所示。从轴向速度云图(见图8a))可以看到,泵喷尾流场中的喷流加速区和轮毂低速区的分布范围更加明显,轮毂尾部的圆锥状低速区基本上在z/D=1.2~1.3处逐渐闭合。同样地,y方向的平均速度云图也基本与瞬态值分布相吻合,上半部分的值为负,下半部分的值为正,这是由于导管存在导致尾迹径向向内流动的分量。 图8 PJP在J=0.8时,周期平均速度云图实验测试结果 定量地,对泵喷推进器在尾部不同轴向位置处的时间平均速度进行对比,如图9所示,以便于后续研究者进行实验和数值模拟验证。选取4个轴向位置,分别是:A)z/D=0.49;B)z/D=1.02;C)z/D=1.52;D)z/D=2.02。 图9 J=0.8,PJP尾部不同轴向位置处的时间平均速度实验结果 可见,J=0.8时,在导管尾部z/D=0.49处,泵喷尾流的轴向平均速度峰值在r/D≈0.3处,约为Va/U=1.75,而轮毂低速区的峰值Va/U略小于1。随着流体向下游移动,喷流加速区的峰值略微下降,而轮毂低速区的值逐渐增大,伴随着上文讨论的轮毂低速区的闭合。在远场z/D=2.02处,喷流加速区的峰值已经很不明显。 对泵喷推进器轴向速度的脉动量进行统计,如图10所示。在此,PIV系统时间分辨率为0.001 s,采样周期T取20个旋转周期(T=1 s,即采样步数N=1 000),ui为某点处第i步的轴向速度值, 轴向 如图所示,在导管尾部z/D=0.49处,轴向速度脉动量比较大,速度脉动的均方根值在r/D≈0和r/D≈0.4处出现2个明显的峰值。而随着流动向下游移动,在z/D=1.52处,轴向速度脉动量明显降低,脉动均方根在r/D≈0的峰值出现明显下降,对应于云图中轮毂低速区区域的闭合。而r/D≈0.4处的峰值依旧较高(uRMSE/U约为0.22),对应于云图中喷流加速区与周围自由来流的交界区域。 此外,对泵喷推进器尾部的速度场进行进一步处理。由于测试得到的是二维速度,因此给出泵喷推进器尾部截面上x方向上的涡量分量,归一化为wxD/U,如图11所示。 图11 PJP在x方向上的涡量分量平均值的结果实验测试(图中采用wxD/U来进行归一化) 可以看到,在导管尾部r/D≈-0.4和r/D≈0.4位置处出现了明显的高涡量条带。随着向下游移动,高涡量区域逐渐出现数值上的减小和径向方向上的扩散。对比图7可以看到,这些高涡量区域正是环状混合区的位置,也是泵喷推进器尾部叶梢涡的空间发展轨迹区域。对比图10a)~10b)可以看到,在低J时,此区域的涡量更高,且径向扩散区域更大。低J时的流场在下面进行分析。 同样地,给出泵喷推进器在J=0.5时的瞬态速度和周期平均速度云图,如图12~13所示。与J=0.8相比,低进速系数下的泵喷尾流的轴向速度更大,而y轴方向上的速度交换也更明显。对比二者的轴向速度(见图8a)和图13a))可见,低进速系数下,泵喷尾部喷流加速区的核心值更大,有明显的分层。这种差别在图14中表现更为明显,在J=0.5,z/D=0.49处,尾流轴向平均速度峰值约为Va/U=2.7,且喷流加速区的峰值更陡峭。此外,由于轴向速度的增大,低进速系数下的泵喷轮毂低速区的轴向速度也有明显增大,其向下游的延续距离也越长。二者y轴方向上的速度分布趋势基本相同,J=0.5工况下的数值略大。 图12 PJP在J=0.5时,瞬态速度云图实验测试结果 图13 PJP在J=0.5时,周期平均速度云图实验测试结果 图14 J=0.5,PJP尾部不同轴向位置处的时间平均速度实验结果 本文对一型九叶定子七叶转子的泵喷推进器,在空泡水筒中进行了水动力性能和PIV流场测试,得到了泵喷推进器的敞水性能和流场特性,结果表明: 1) 此型前置定子式泵喷推进器的转子推力系数、定子和导管的推力系数均随着J的增大而减小,转子的扭矩系数也随着J的增大而减小,但定子和导管的扭矩系数绝对值反而随着J的增大而增大。泵喷推进器的效率随着J的增大先增大后减小,在J=1.0处达到最大,为61.91%。 2) 前置定子式泵喷推进器的推力主要由转子提供,实验测试泵喷模型在0.5 3) 泵喷推进器的尾流场基本上分为三部分:喷流加速区、轮毂低速区、混合区。实验测试得到了不同工况下的泵喷推进器尾流场中的瞬态速度、平均速度值。低速重载工况下,泵喷推进器尾部喷流加速区的峰值更大,轮毂低速区的持续长度也更长。
3.2 流场测试结果





4 结 论
猜你喜欢
防爆电机(2021年1期)2021-03-29舰船科学技术(2021年12期)2021-03-29中国煤层气(2021年5期)2021-03-02测控技术(2018年2期)2018-12-09当代陕西(2018年12期)2018-08-04凿岩机械气动工具(2017年3期)2017-11-22电子产品可靠性与环境试验(2016年6期)2016-05-17华东理工大学学报(自然科学版)(2015年4期)2015-12-01学习月刊(2015年10期)2015-07-09电机与控制应用(2015年10期)2015-03-01
