
玉米精准变量播种技术与装备研究进展
2023-07-14 14:27:36杜兆辉和贤桃张东兴钟翔君
农业工程学报 2023年9期
杜兆辉,和贤桃,杨 丽 ,张东兴,崔 涛,钟翔君
(1. 中国农业大学工学院,北京 100083;2. 农业部土壤-机器-植物系统技术重点实验室,北京 100083)
0 引言
玉米是世界上最重要的谷类作物之一,是全球三分之一人口的主要食粮,兼具饲料、能源、医疗等多元用途[1-2]。玉米同时也是中国的第一大粮食作物,在保障国家粮食安全方面具有重要的战略意义[3]。近年来,玉米单产水平增长缓慢成为限制中国玉米产量进一步提升的瓶颈。FAO 数据显示,2021 年中国玉米单产6 291 kg/hm2,美国玉米单产11 110 kg/hm2,仅为美国单产的57%[4]。播种是玉米生产过程中的关键环节,播种质量的好坏直接影响玉米的产量。目前生产中常用的精量播种技术是将种子均匀分布在田间,虽在一定程度上促进了玉米增产,但这种“一视同仁”的播种方式忽略了玉米生长环境的差异性,难以深挖土壤的增产潜力,造成资源利用不充分。因此,为进一步提高玉米单产水平,应根据玉米生长环境信息,同时结合玉米栽培理论来“因地制宜”地投入种子量,即变量播种。
变量播种技术是一种依据土壤肥力、光照等环境因素的空间异质性来调整作物播种量,从而实现作物生长环境与播种量合理精准匹配的精细农业技术[5]。随着社会的快速发展和人口的持续增长,资源、环境和人口之间的矛盾愈发突出,如何利用有限的资源进一步提高粮食产量,同时减少对环境的伤害是当下农业生产需要考虑的重要议题。变量播种与传统播种相比,充分利用了作物生长环境时空分布不均的特性,因地制宜地调整播种参数,在进一步提高粮食产量的同时,实现了资源利用率的提高和环境的可持续发展。Ag Leader 公司研究表明,采用变量播种技术可使玉米每公顷增产943 kg[6],ZEMLICKA[7]调查发现变量播种不仅能够使玉米每公顷增产925 kg,还可节约5%的良种,由此可见变量播种技术具有突出的节本增效特点,也因此成为国际国内的研究热点。分析国内外玉米变量播种技术研究现状,明确研究差距,对促进国内变量播种技术发展和玉米单产提升具有重要意义。因此,本文从土壤肥力指标精确获取技术、最佳播量决策技术以及播量精准调控技术三方面对国内外玉米变量播种技术展开综述,并提出了未来中国在玉米变量播种领域的研究重点和发展建议。
1 发展概况
发达国家对变量播种技术的研究始于20 世纪80 年代,主要发展阶段及关键技术或装备如表1 所示[8-11],先后经历了萌芽期、初始期、成长期与成熟期,先后开展了电驱排种技术、变速率控制技术、土壤养分动态检测技术、播量决策技术的研究。研制了多种电驱式精量排种器和变量播种控制系统,如Precision planting 公司的vDrive 排种器、Kinze 的Ture Rate 排种器,John Deere公司的SeedStarTM2 变量播种控制系统、Case IH 公司的先进农作系统(AFS)。普渡大学精准农业经销商调查报告显示,2025 年美国变量播种技术在农机经销商中的推广比例预计达到73%[11]。与国外相比,国内对于变量播种技术的研究仍处于初始期,主要集中在土壤养分动态检测、电驱排种等方面的研究。
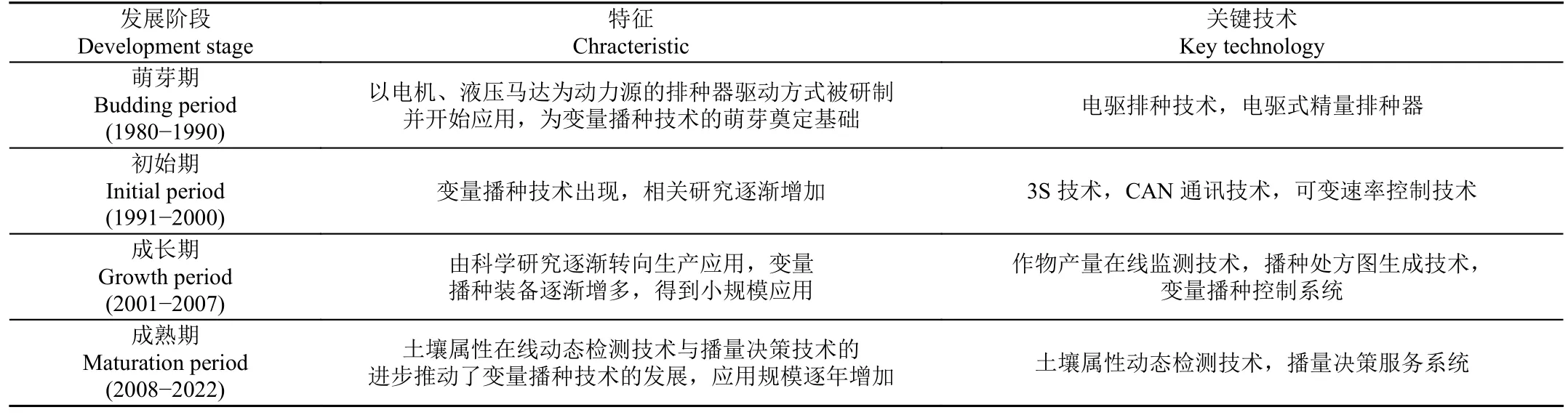
表1 玉米变量播种技术的发展阶段、特征与关键技术Table 1 Development stage,characteristics and key technologies of maize variable-rate seeding technology
变量播种技术按照实施过程可以分成土壤肥力指标精确获取技术、播量决策技术与播量精准调控技术3 个部分。土壤肥力指标精确获取是利用近地传感或遥感等手段快速检测土壤有机质、氮磷钾、电导率等指标,并采用空间插值方法将获取的土壤点状信息转化为面状信息,最后利用聚类算法将农田土壤养分信息划分为多个类别的过程。国外基于电流电压四端法、电磁感应技术与光谱分析技术开展了广泛的土壤肥力指标动态检测研究与装备研制,实现了较高作业速度下的多种土壤属性检测。国内对于土壤肥力指标动态测量的研究起步较晚,仅停留在研究阶段未见有相应动态检测设备进入市场。播量决策是依据土壤肥力确定适宜的播种量。国外开展了基于管理区和基于模型的播量决策方法研究,且研发了多种播量决策平台,而国内对于播量决策方法的研究鲜有报道。播量精准调控技术是利用变量播种装备依据播量决策结果实现不同土壤肥力下的播种量精准调节。国外研发了多种变量播种装备且市场应用比例逐年增加。国内主要集中在电驱排种方面,对于变量播种装备的研究较少。
2 土壤肥力指标精确获取技术
精确获取与作物生长相关的土壤肥力指标是实施变量播种的首要环节。获取肥力指标的精度、速度和密度是影响变量播种作业质量和作业效率的重要因素。传统的土壤取样检测方法具有效率低、耗时长、成本高等弊端,无法满足变量播种作业所需的快速、精准、高密度的检测要求。另外,获取的土壤肥力指标属于点状信息,无法全面表达土壤属性的空间分布特征,必须将其转化为面状信息并进行分类后才能用于变量播种作业。因此,土壤肥力指标动态检测和空间分布特征的精准表达对于变量播种作业具有重要影响。
2.1 土壤肥力指标快速检测技术
2.1.1 基于近地传感的土壤肥力指标动态检测
氮、磷、钾、有机质(soil organic matter,SOM)与电导率(electrical conductivity,EC)是表征土壤肥力的重要指标。土壤肥力指标动态检测是指将传感器搭载于拖拉机或其他农用机械实现土壤肥力指标快速、高密度获取的方法。KWEON 等[12]利用光谱仪采集了86 个土壤样品的光谱信息,采用逐步多元线性回归和偏最小二乘法筛选得到用于土壤有机质测量的特征波长分别为660和940 nm。开发了基于双特征波长的土壤有机质动态检测平台。通过室内试验探究了光学窗口与土壤样品间距、土壤含水率对预测准确度的影响,研究表明预测准确度随间距的增大而降低,土壤含水率小于10%对此传感器的检测无显著影响。开展了作业速度10~15 km/h、采集频率1 Hz 的田间动态检测试验,试验结果表明所有田块土壤有机质的相对分析误差(residual prediction deviation,RPD)均大于2,模型具有良好的预测性能。KODAIRA等[13]研制了一种基于VIS-NIR 的土壤实时传感器检测系统,该检测系统主要由触摸屏、DGPS、犁铲、卤素灯、传感单元及2 个分光光度计组成。利用该检测系统建立了土壤有机质、电导率、全氮、速效磷等指标的预测模型,其中,有机质预测模型的决定系数R2达到0.90,具有很高的预测精度。但该装置作业速度较低(2 km/h)、结构复杂。为消除天气条件对土壤近地传感的影响,RODIONOV 等[14]以光谱仪为核心搭建了一种基于可见光-近红外的土壤有机碳(soil organic carbon,SOC)动态采集装置。该装置主要由三点悬挂结构、镇压辊、检测箱、卤素灯、VIS-NIR 光谱仪(波长350~2 500 nm)、光纤等组成。在3 km/h 的采集速度下开展的田间采集试验结果表明,采用该装置得到的SOC 的预测值与实际值之间的R2达到0.65,标准差为1.22 g/kg。此外,为补偿土壤含水率和表面粗糙度对土壤有机碳(soil orgamic C,SOC)预测的影响,RODIONOV 建立了不同含水率和粗糙度下的SOC 预测模型,使得该检测装置在不同区域均可达到较高的检测精度。MOUAZEN 等[15]研制了一种基于可见光-近红外光谱仪(305~2 200 nm)的土壤多属性动态检测平台。采用偏最小二乘法建立了土壤有机碳、速效磷的预测模型。土壤有机碳预测模型的R2为0.73,RPD 为1.92;速效磷预测模型的R2为0.69,RPD 为1.80。在1.5 km/h 的作业速度下开展田间试验,结果表明基于土壤属性检测平台得到的土壤属性分布图与实际取样测量得到的分布图具有高度相似性(土壤有机碳的标准差为0.208 g/kg,速效磷的标准差为1.463 g/kg)。CHRISTY等[16]研制了一种基于近红外反射光谱的动态土壤参数检测装置,该装置由拖拉机牵引完成土壤动态检测,每秒钟可采集20 个光谱,作业速度可达6 km/h。田间试验表明,该装置对土壤有机质的预测效果较好,预测模型的R2可达0.67,均方根误差(root mean square error,RMSE)为0.52%。
除科研机构外,国外农机企业和精密仪器厂商也纷纷投入到土壤肥力指标动态检测设备的研发当中,推出了部分产品。Veris Technologies 公司研制的Veris 3 150型电导率检测系统将开沟犁刀作为电极向土壤中发射电信号,电信号在土壤中产生电磁场,土壤在电磁场的作用下产生反馈电信号,电极接收电信号后,对电信号进行处理得到电导率。Veris 3 150 检测频率为1 Hz,最高检测速度可达25 km/h[17]。Geonics Limited 公司研发的基于电磁感应原理的EM38-MK2 型电导率检测仪主要由发射线圈和接收线圈组成,可实现电导率的非破坏测量。该仪器可以同时测量两路不同深度的电导率,最大有效测量深度为1.5 m,电导率测量范围为0~1 000 mS/m,在30 mS/m 下的测量误差为5%[18]。Veris Technologies公司研制的OpticMapper 土壤有机质/电导率检测仪在“电流-电压四端法”检测电导率的基础上配备了双波长的光学传感器,实现了土壤有机质和电导率的同步检测[19]。该检测仪的测量频率为1 Hz,测量速度可达20 km/h,测量深度为38~76 mm。Precison Planting 公司研制的SmartFimer 传感器,可同时发射和接收X 射线、可见光、无线电波3 种光线,实现土壤有机质、种沟温度、作物残茬量等信息的在线测量。SmartFirmer 小巧灵活,检测速度可达10 km/h,可安装于多种农业机械实现变量作业[20]。
国内对于车载式土壤肥力指标动态检测的研究仍处于初级阶段。杨玮等[21]开发了一种基于数字示波器的车载式土壤电导率检测系统,该检测系统采用信号发生器代替恒流源,采用数字示波器代替电压表,进一步提高了测量精度。田间试验表明,在电极与土壤接触良好的情况下,检测值与真实值的R2可达到0.9。梁栋等[22]基于电流-电压四端法设计了一种车载式土壤电导率检测系统,该检测系统主要由恒流信号源电路、信号处理电路、GPS、Veris3100 型电导率传感器等组成,室内和田间试验表明该检测系统的动态响应时间为540 ms,系统检测精度R2为0.734 2,最大作业速度为5 km/h。为补偿土壤含水率、土壤粒度对土壤电导率检测的影响,裴晓帅等[23-24]利用“电流-电压四端法”结合近红外光谱开发了土壤电导率与光谱参数复合测量系统,通过光谱数据补偿土壤含水率与粒度对电导率测量结果的影响,提高了电导率的检测精度。钟翔君等[25]探究了土壤粒径对有机质含量预测的影响,结果表明平均光谱反射率与变异系数随着粒径的减小而增加,大于540 nm 时差异显著,粒径小于0.1 mm 的预测模型的精度最高,RPD 为2.00。周鹏等[26]基于近红外漫反射设计了一种车载式土壤全氮检测仪。在3.2 km/h 的作业速度下,该检测仪检测得到的土壤全氮值与实际值相关系数为0.918 2,检测精度满足变量播种作业的需求。
基于近地传感的土壤肥力指标动态检测技术总结,如表2 所示。土壤肥力指标动态检测研究主要围绕光谱分析技术、电磁感应技术和电流-电压四端法展开。其中,电磁感应技术与电流-电压四端法用于检测土壤电导率,光谱分析技术主要应用于土壤有机质、氮磷钾的检测。此外,国外部分产品将光谱分析技术与电流-电压四端法相结合实现了电导率、有机质等指标的同步检测,提高了机具的利用效率。与国外相比,国内在土壤有机质、氮磷钾等指标的动态检测方面研究较少,目前仍然没有上述指标的动态检测装备进入市场。与基于光谱分析的设备相比,基于电磁感应技术和电流-电压四端法的电导率动态检测设备具有较高的检测速度与精度。光谱信息易受到土壤含水率、表面平整度以及机械振动等因素影响,因此研究不同含水率下的土壤肥力指标预测模型和动态检测滤波算法是进一步提高检测精度的手段。另外,基于多传感器融合的多指标高精度协同检测成为土壤肥力指标动态检测的发展方向。
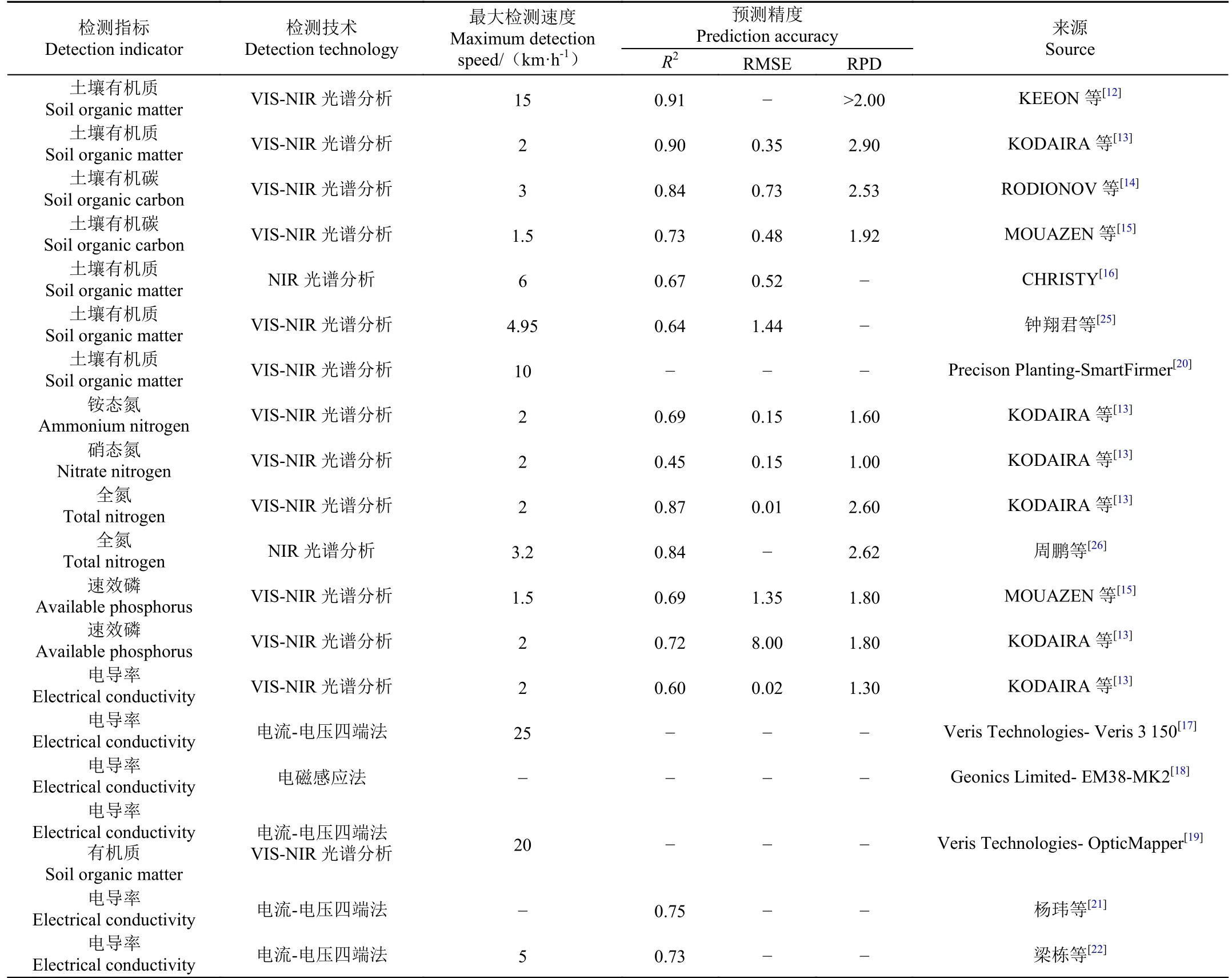
表2 基于近地传感的土壤肥力指标动态检测技术总结Table 2 Summary of dynamic detection technology of soil fertility indicators based on near-ground sensing
2.1.2 基于遥感的土壤肥力指标检测
高分辨率遥感设备的研发与应用为土壤肥力指标快速获取开辟了新的道路。国内外学者利用多光谱或高光谱设备通过人造卫星、无人机等搭载平台开展了广泛的土壤肥力指标反演研究。
特征波段的筛选和预测模型的构建是影响基于多光谱或高光谱遥感反演的2 个重要方面。YU 等[27]提出了一种用于土壤属性预测的 “先粗选后精选”的特征波长筛选策略,首先利用区间组合优化算法(improvement of interval combination optimization algorithm,IICO)确定特征波长所在区间,然后采用差分进化算法(differential evolutionary algorithm,DE)和连续投影算法(successive projections algorithm,SPA)均方根误差最小的特征波长组合。与全波长建立的模型相比,利用筛选后的特征波长结合偏最小二乘法建立的土壤有机质、全磷、全钾预测模型具有更高的预测精度。钟翔君等[28]分别采用竞争性自适应重加权法(competitive adaptive reweighted sampling algorithm,CARS)、连续投影法(SPA)、竞争性自适应重加权-连续投影(competitive adaptive reweighted sampling -successive projections algorithm,CARSSPA)、无信息变量消除法(uninformative variables elimination algorithm,UVE)等不同特征波长筛选算法结合偏最小二乘回归建立了多个土壤有机质预测模型,结果表明基于CARS-SPA 建立的模型效果最好(RPD=3.188)。李雪莹等[29]对比了SPA、UVE、遗传算法(genetic algorithm,GA)、相关系数法(correlation coefficient method,CC)4 种单一特征提取算法与基于加权投票法的多分类器融合算法对土壤养分含量(总碳、全氮、全磷)特征波长的提取效果,结果表明多分类融合算法所建模型的精度优于单一算法,能够以更少的特征波长得到更优的模型预测精度。与传统线性回归算法相比,机器学习算法在构建预测模型方面具有显著优势[30-31]。杨越超等[32]分别采用偏最小二乘回归和BP 神经网络建立了土壤全氮、速效磷、速效钾的高光谱反演模型,与偏最小二乘回归相比,BP 神经网络模型具有更高的预测精度。KHANAL 等[33]以机载多光谱设备采集的光谱数据和地面取样数据为建模依据,分别利用线性回归法(linear regression,LM)、随机森林法(random forest,RF)、神经网络法(neural network,NN)、支持向量机(support vector machine,SVM)、梯度提升模型(gradient boosting model,GBM)、Cubist 模型建立了土壤有机质、速效钾等指标的预测模型,验证结果表明,与LM 相比,机器学习算法具有更高的预测精度和稳定性,NN 对土壤有机质的预测精度较高(R2=0.67,RMSE=0.44),SVM对速效钾的预测精度较高(R2=0.21,RMSE=0.49),同一算法下的预测模型难以实现对所有指标的高精度预测。
为提高基于遥感的土壤肥力指标反演精度,国内外学者主要采取了结合景观环境因子等辅助数据建模、利用多时相影像构建预测模型、近地传感与星地遥感相融合等方法。当研究范围从局域扩展到区域时,地面覆盖物、地形特征等因素影响土壤属性的预测精度,通过将归一化植被指数(normalized difference vegetation index,NDVI)、高程、坡度等景观特征作为土壤属性预测的辅助数据构建预测模型提高了预测精度。KUMAR 等[34]将NDVI、高程、坡度和复合地形指数等8 个指标作为土壤有机质反演的辅助数据,利用回归克里格法建立了用于不同土地类型的土壤有机质预测模型,预测模型的RMSE 为0.196,具有良好的预测性能。利用多时相影像构建预测模型是将多期影像作为模型构建的数据,通过结合时相信息克服了单期影像信息表达不足的弊端,进而提高了模型的预测精度[35-36]。近地传感无法实现土壤属性的大面积快速检测而遥感易受到天气、地面覆盖物等因素影响,因此,采用近地传感与遥感相结合的方法进一步提高了土壤属性的预测精度。针对单一传感器难以实现土壤多属性大面积的监测,徐冬云[37]通过将可见光-近红外光谱检测、中红外光谱检测等近地传感技术与高分一号、哨兵1 号等遥感数据相结合的方法,研究了近地传感融合、星地传感融合等多层次传感融合方法对多种土壤属性检测精度的影响,研究表明,与基于单一遥感数据建立的预测模型相比,多层次传感融合显著提高了土壤肥力指标的预测精度,土壤有机质、速效氮、速效磷、速效钾的均方根误差分别降低了10.61%、15.29%、18.13%与15.09%。
从检测指标、模型构建方法与预测精度3 个方面对基于遥感的土壤肥力指标检测研究进行总结,如表3 所示。基于遥感的土壤肥力指标检测主要围绕土壤有机质与氮磷钾开展,对于电导率的遥感预测研究较少。偏最小二乘法是应用较多的模型构建方法。与基于近地传感相比,基于遥感的土壤肥力指标检测的精度普遍较低。遥感技术具有非接触、面检测的优势,可实现待作业区域土壤肥力指标的快速整体获取。但是,遥感易受到地面覆盖物、研究尺度、天气等的影响。将遥感技术与近地传感相结合以提高检测精度和检测范围的星地传感融合检测是土壤肥力指标快速检测技术另一发展趋势[40]。
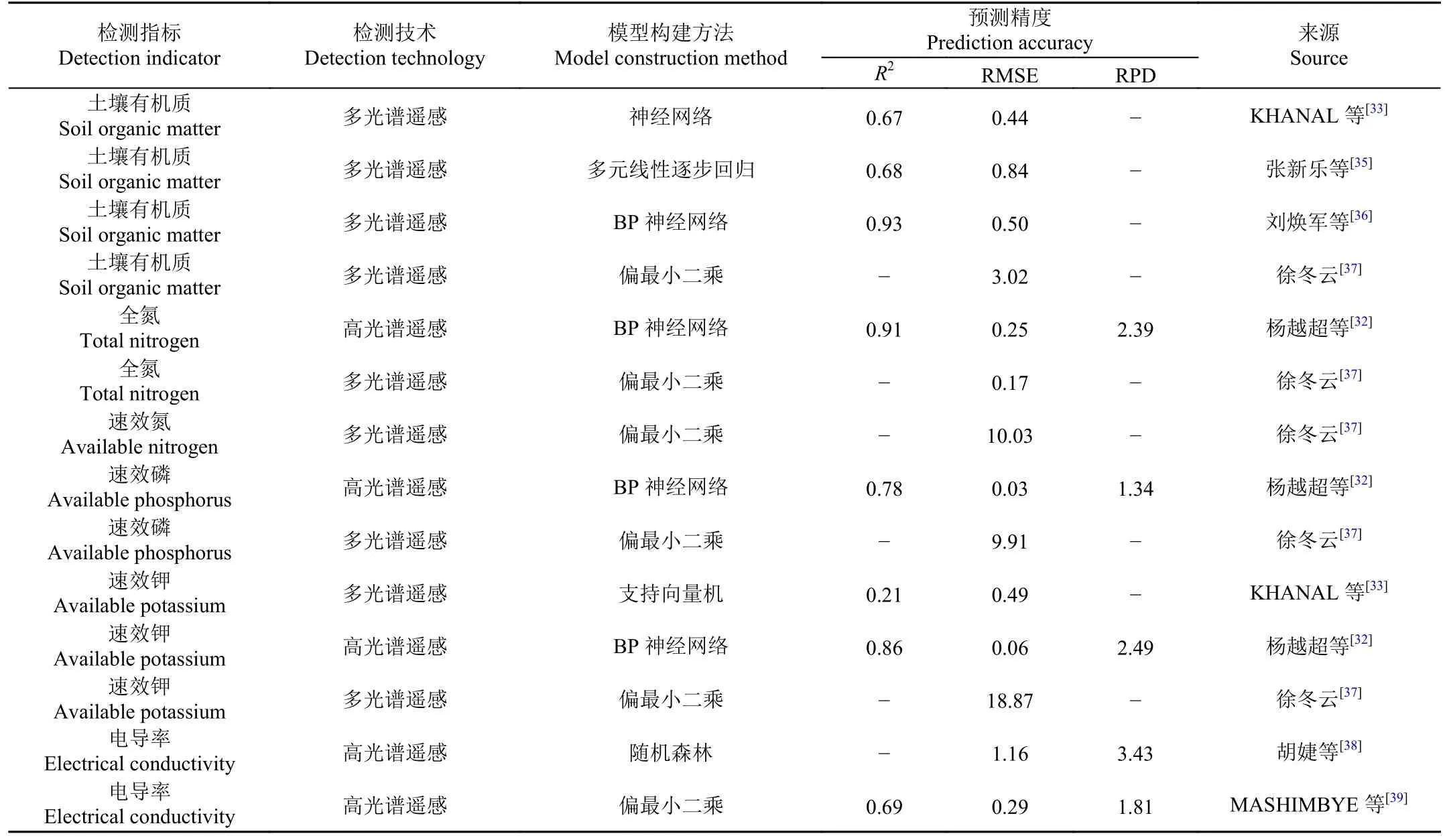
表3 基于遥感的土壤肥力指标快速检测技术总结Table 3 Summary of rapid detection technology of soil fertility indicators based on remote sensing
2.2 土壤肥力指标空间分布精准表达技术
2.2.1 土壤属性空间插值方法
空间插值是指在已知部分采样点信息的基础上,建立属性域和空间域的映射关系,得到能够表征属性空间分布特征的数学模型,进而求得已知区域内其他未知点的属性值[41]。近地传感得到的土壤肥力指标信息属于点状信息,必须通过空间插值转化为能够表征土壤属性空间分布特征的面状信息才能进一步的应用。
在相同数量的已知样本下,空间插值方法的选择是影响插值精度的主要因素。目前常用的插值方法及其特征如表4 所示[42-47]。为探究不同插值方法的插值效果,国内外研究学者开展了插值方法对比研究。ADDIS 等[48]为探究普通克里格法(ordinary kriging,OK)、反距离加权法(inverse distance weighting,IDW)、径向基函数法(radial basis functions,RBF)在预测土壤质地、pH、SOC 和速效磷(available phosphorus,AP)等指标的性能差异,分别用以上3 种方法对采集的72 个样本点进行插值,采用交叉验证评估插值方法的性能,研究表明OK 法对SOC 和砂粒含量的预测精度更高,RBF 对AP和粘粒含量的预测精度更高,IDW 对pH 值的预测精度更高。MARIANO 等[49]提出了一种基于分位数回归的随机森林插值方法(quantile regression forest spatial interpolation,QRFI),并开展了与普通克里格法与反距离加权法的比较,结果表明QRFI 的预测误差比其他插值方法低16%,该模型具有较优的预测性能并且在处理大型数据时具有耗时短的优点。徐英等[50]将贝叶斯最大熵法与贝叶斯人工神经网络法相结合提出了BMENN 法(Bayesian maximum entropy method combined with Bayesian neural networks),与贝叶斯人工神经网络法、普通克里格法进行对比,结果表明BMENN 法具有更小的估计方差和平均绝对误差。除插值方法外,取样间隔也会影响插值精度。LIU 等[51]对同一采样地点不同采样间隔下(20、40、60 m)的土壤有机质、速效氮、速效磷、速效钾等进行克里格插值,在3 种不同采样间隔下随机选取7 个采样点,通过比较预测值与实测值来评估取样间隔对土壤属性插值精度的影响,结果表明,变异系数越大的指标应当采取较小的取样间隔,有机质在60 m 间隔下的插值精度最高,速效氮磷钾在20 m 间隔下的插值精度最高。
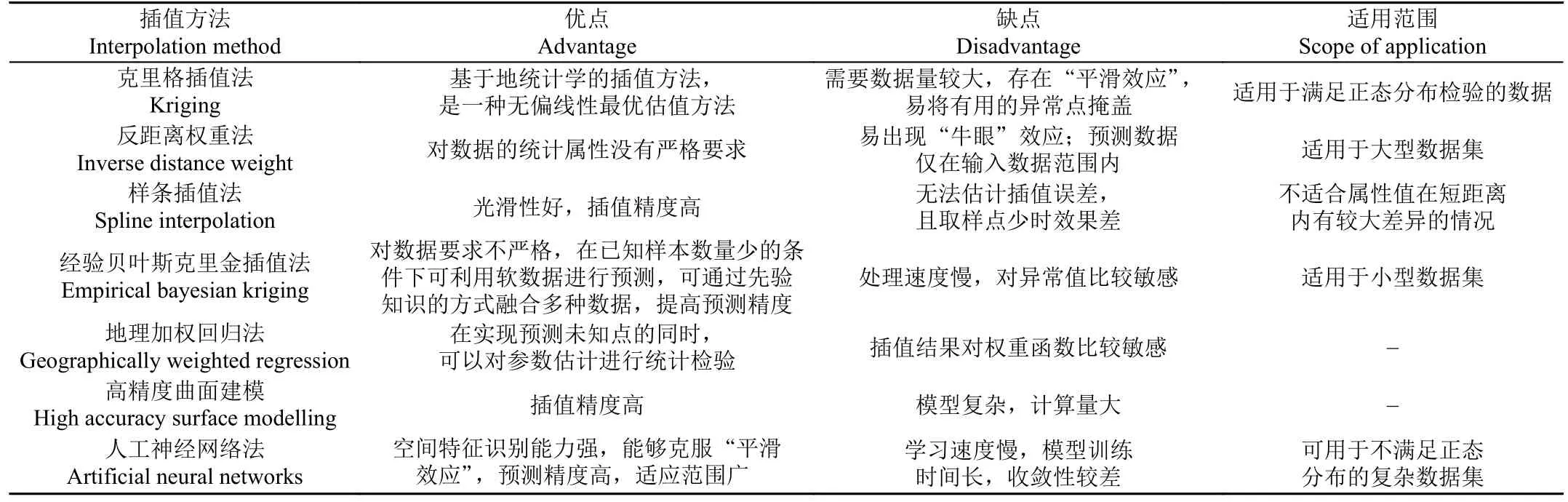
表4 常用土壤属性空间插值方法Table 4 Commonly used soil attribute spatial interpolation methods
综上,以克里格插值法为代表的传统插值方法在实际应用当中仍然占主导,但基于机器学习的多种新型插值方法在预测精度方面具有显著优势。为提高插值精度、获取高精度属性空间分布图必须根据不同的土壤属性选择合适的取样间隔和插值方法。
2.2.2 农田管理区划分方法
农田管理区划分是指根据产量限制因子的相似性将地块划分成不同子区域的过程,是进行精准决策的前提。农田管理区划分主要包括数据源的选择和分区方法的选择两部分。随着数据获取技术的不断发展,用于农田管理区划分的数据源从单一的土壤属性数据逐渐扩展为包括土壤属性、地形、产量等在内的多源数据。与单一数据相比,基于多源数据的农田管理分区能够更加真实的反映不同区域间的差异,从而可以根据差异性创建更加合理的管理策略,提高资源利用率。因此,基于多源数据的农田管理分区逐渐成为主流。管理区划分方法是影响分区效果的另一重要因素,目前常用的农田管理区划分方法及其特征如表5 所示[52-58]。
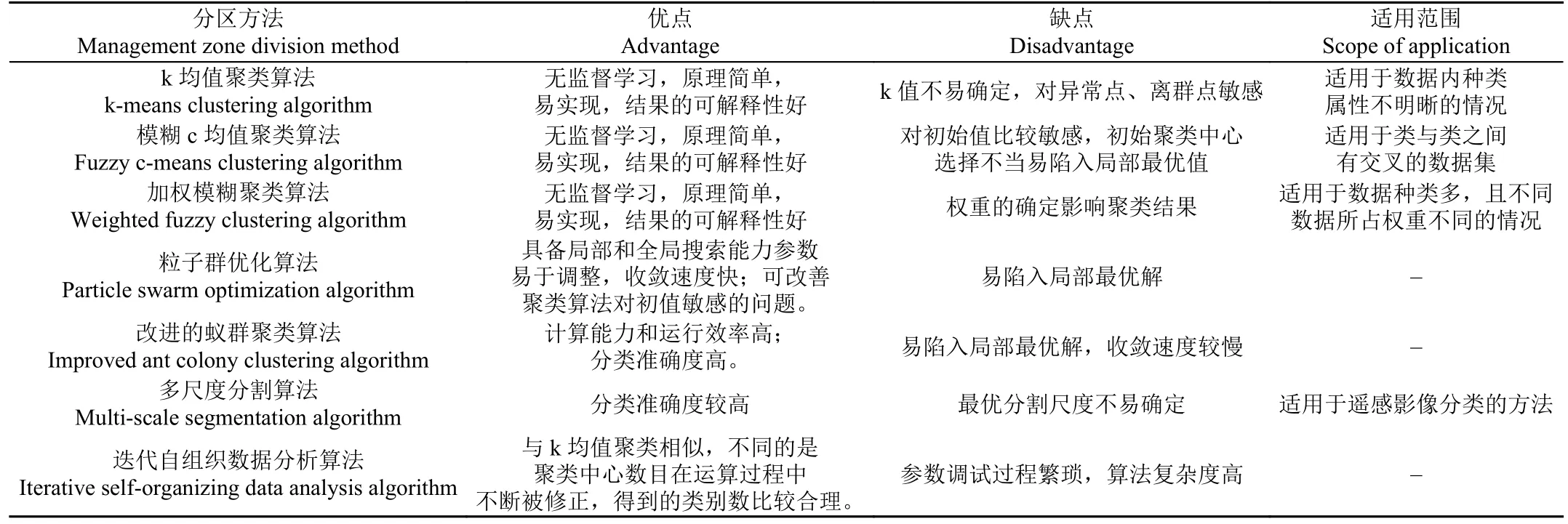
表5 常用农田管理区划分方法及其特征Table 5 Common methods of dividing farmland management areas and their characteristics
对于农田管理区划分的研究主要集中在分区方法的性能评估和分区数目的确定两方面。WANG 等[59]以土壤有机质、pH、全氮、碱解氮等6 种属性为数据源,采用加权模糊聚类法对管理区进行划分,采用模糊性能指数和归一化分类熵确定分区数目,对最终的3 个子区域进行方差分析表明各分区之间具有显著性差异,加权模糊聚类法具有良好的分区效果。GAVIOLI 等[60]在利用空间相关分析(spatial correlation analysis,SCA)、主成分分析(principal component analysis,PCA)和多元空间分析(multivariate spatial analysis based on Moran’s index PCA,MPCA)对构建农田管理区的数据源进行筛选的基础上,提出了空间自相关分析与多元空间分析耦合筛选数据源的方法(multivariate spatial analysis based on Moran’s index PCA -spatial correlation analysis,MPCASC),然后利用模糊c 均值聚类法对上述4 种方法筛选后的数据进行分类,以方差减小量、模糊性能指数、修正分类熵、平滑指数等6 个指标对分类结果进行评价,结果表明数据源对于农田管理区的划分效果影响较大,经过MPCA-SC 法筛选后的分类效果最好,极大地提高了管理区的质量。GAVIOLI 等[61]以3 块农田的土壤质地、高程、坡度、作物产量为原始数据源,用MPCA-SC法对原始数据进行筛选,评估了k 均值聚类、模糊c 均值聚类、McQuitty 法、Fanny 法等17 种方法的聚类效果,结果表明McQuitty 法和Fanny 法最大程度的降低了3 块农田的产量方差,且区域内部具有高度同质性,分区效果最好。
传统分区方法未考虑土壤属性数据之间的空间相关性,易导致分区结果出现孤立的碎片,影响变量作业。针对基于网格采样和空间插值来划分管理区的方法存在时效差、成本高的弊端,刘焕军等[62]以遥感影像反射率与土壤有机质、含水率和氮元素的相关关系为依据,提出了利用遥感影像划分农田管理区的方法,并通过实测土壤属性和作物生理参数评估了划分结果,研究表明基于遥感影像划分管理区的方法可满足精准农业管理需要,提高了管理区划分的时效性。为有效提取核心分区指标并解决分区破碎,黄芬等[63]提出了基于指标相关性聚类的无监督过滤式指标选择方法(feature selection based on correlation clustering algorithm,FSCC)和基于一致性和完整性的指标优化方法(consistency and integrity optimization,CIO),与最大方差、拉普拉斯得分2 种传统特征选择方法进行比较,结果表明采用FSCC 筛选指标的分区结果更优,CIO 在保持分区效果的前提下进一步减少指标,显著减少了分区破碎。
综上,k 均值聚类是当前应用最多的农田管理区划分方法;分区指标对管理区的划分具有显著影响,通过优化指标选择方法筛选合适数目的分区指标可以有效的解决分区破碎的问题。
3 最佳播量决策技术
播量决策是变量播种过程中的核心环节,决策的合理与否直接影响变量播种作业效果。国外对于变量播种决策方法的研究相对较多,国内鲜有报道。本节在阐述播量决策方法国内外研究现状的基础上,分别提出了基于模糊推理、田间试验和机器学习的播量决策方法。
3.1 播量决策方法研究现状
国外对于变量播种决策方法的研究可以分为基于农田管理区的决策方法和基于模型的决策方法两种。基于农田管理区的决策方法是在划分农田管理区的基础上进行播种量的确定,基于模型的决策方法是通过播种量试验建立土壤肥力与播种量的数学模型来确定最佳播种量[64]。
实施基于农田管理区的决策方法首先需要完成农田管理区的划分,然后根据经验法或试验法为每一个子区域确定适宜的播种量。经验法完全依赖农场经营者的种植经验,通常将中等肥力区域配置为常规播量,将高肥力区域配置为高于常规播量,将低肥力区域配置为低于常规播量,其他区域按照常规播量的百分比逐级确定,经验法操作简单,但是主观性较强,风险性较高;试验法是在划分管理区之后,在不同肥力区域布置条带试验,依据条带试验结果建立土壤肥力等级、播种量及产量的数学关系,以此为依据来确定各个区域的播种量,与经验法相比,此种方法具有较高的可靠性,但由于需要设置条带试验及分析数据,此种方法不易被农民接受。MUNNAF 等[65]为探究变量播种的经济效益,以SOM、pH、速效磷、速效钾、归一化植被指数等8 种指标为数据源,以k 均值聚类法为分区方法对两块试验田进行管理区划分,根据专家经验,以“土壤肥力越高,播种量越大”为原则确定各子区域的播种量,然后根据播量处方图在试验田进行了定量播种和变量播种条带试验,试验结果表明,变量播种与定量播种相比在作业成本和单位面积产量上具有显著优势,2 块试验田单位面积作业成本较定量播种分别降低2.5%、5.7%,单位面积产量分别提高4.6%、21.3%,单位面积净收入分别增加5.8%和52.8%。HÖRBE 等[66]采用划分管理区的方法对巴西南部地区的玉米播种量进行优化,将试验田划分为高产区、中产区和低产区3 个管理区,以播种量为试验因素在每个管理区内进行随机区组试验。播种量以10 000 粒/hm2为梯度,从50 000 粒/hm2增加至90 000 粒/hm2,其中,70 000 粒/hm2是常规播种量。试验结果表明使得低产田获得最高产量的适宜播量应在常规播量的基础上减少31%,与常规播量相比,单位面积产量提高1.5 t/hm2;使得高产田获得最高产量的适宜播量应在常规播量的基础上增加13%,与常规播量相比,单位面积产量提高了0.9 t/hm2。基于农田管理区的播量决策方法具有较强的通用性,但是这种决策方法需要在播种作业之前对待播区的土壤养分进行检测,耗时长、成本高,并且无法得到区域最佳播种量。
为克服基于农田管理区决策方法的盲目性,实现播种量的精确决策,开展了基于模型的决策方法研究。为探究不同产量水平条件下玉米产量随播种量的变化规律,DuPont Pioneer 种子公司进行了长期的玉米播量试验,在同一产量水平的地块下,玉米产量随播种量的增加呈现先增加后降低的二次函数关系,存在最佳播种量使得产量达到最大值[67],除此之外,国外许多探究玉米产量随播量变化趋势的研究也得到了类似的结果[68-70];在同一产量水平的地块下,不同玉米品种具有不同的最佳播量;随着产量水平的增加,使得产量最大化的最佳播种量也逐渐增加,并与产量水平之间呈线性增加关系。
以上研究证明按照“土壤肥力越高,适宜播种量越大”的原则进行播种量的确定可达到增加产量的目的。但是仅对最佳播量随产量水平的变化规律进行初步的定性研究仍无法实现播量的精确决策,必须进行土壤生产力与最佳播量的定量分析。LICHT 等[71]为利用土壤和地形参数优化玉米播种量,实现产量的进一步提高,在3个试验地点按照5 种不同的播种量连续开展了3 年的播量试验,并且建立了土壤属性、地形特征、播种量与玉米产量之间的数学模型,通过数学模型对不同地点不同年份的最佳播量进行预测,最终仅实现了对一个地点3个不同年份的播量优化。传统多项式回归方法并不能很好的解释变量与产量之间的关系,另外播量试验方案中不断更换试验品种可能是导致决策模型准确度较差的重要原因。美国Climate 公司利用82 万个试验地点的数据建立了玉米最佳播种量决策模型,并以此为核心研发了FieldView 处方图决策平台[72],该平台可与John Deere、Echelon 等10 余家农业或农机公司合作共享土壤属性、地形特征、产量等数据,为播种量的决策提供了强大的数据支持。基于模型的决策方法可实现最佳播量的精确决策,最大限度的挖掘土壤生产潜力,但是建立模型需要进行长期的田间试验,并且特定地点的决策模型只能应用于气候条件相近的区域,无法满足所有区域的最佳播量决策需求。
与国外相比,国内对基于土壤肥力的玉米播量决策的相关研究较少,主要集中在探究种植密度对玉米产量的影响方面[73-74]。李娜[75]为探究种植密度对玉米生长发育和产量的影响,以龙育828、德美亚3 号等7 种玉米为试验材料,进行了以60 000、7 000、80 000、90 000 株/hm24 个种植密度田间试验,试验结果表明,随着种植密度的增加,空杆率和倒伏率增加,单株产量线性递减,群体产量均呈现先增加后减小的趋势,存在较优种植密度使产量保持在较高水平。赵霞等[76]以郑单958 等4 种玉米为试验材料在6 个不同的试验地点进行了5 种不同密度的田间试验,试验结果表明,4 种玉米种植密度与产量间呈开口向下的抛物线形式,同一种植密度不同试验地点间玉米产量差异显著,生态环境对玉米适宜密度的影响很大。
3.2 变量播种决策方法
3.2.1 基于模糊推理的决策方法
根据当前国内播量决策方法的研究现状,利用田间试验的方法进行播量决策研究无法在短时间内建立播量决策模型,因此根据目前已有的农学知识和专家经验提出基于模糊推理的决策方法。
模糊推理系统主要由模糊化接口、数据库、规则库、推理机和解模糊接口组成,模糊推理的过程主要包括精确值的模糊化、基于规则的模糊推理和去模糊化3 个过程[77-79]。基于模糊推理的播量决策过程如图1 所示,首先根据相关研究结论、专业书籍确定决策依据和规则,选取玉米品种、土壤有机质、土壤质地作为输入量,播种量作为输出量。平展型玉米适宜稀植,紧凑型玉米适宜密植;有机质高的土壤适合密植,反之则宜稀植;壤土宜密植,黏土宜稀植[80]。然后依据专家经验对上述输入和输出参数进行语言变量的定义,将玉米品种定义为紧凑型(compact)、平展型(flat)2 种;有机质含量(SOM)分为极低(VL)、低(L)、中(M)、高(H)、极高(VH);土壤质地(ST)分为砂土(sand)、壤土(loam)、黏土(clay);决策播量(Qd)分为极低、低、中、高、极高;定义语言变量后选择隶属度函数,一般选择计算效率较高的三角形隶属函数。根据专家经验建立模糊推理规则,采用Mamdani 推理算法进行推理,采用中心平均法进行解模糊,得到最终的适宜播量。
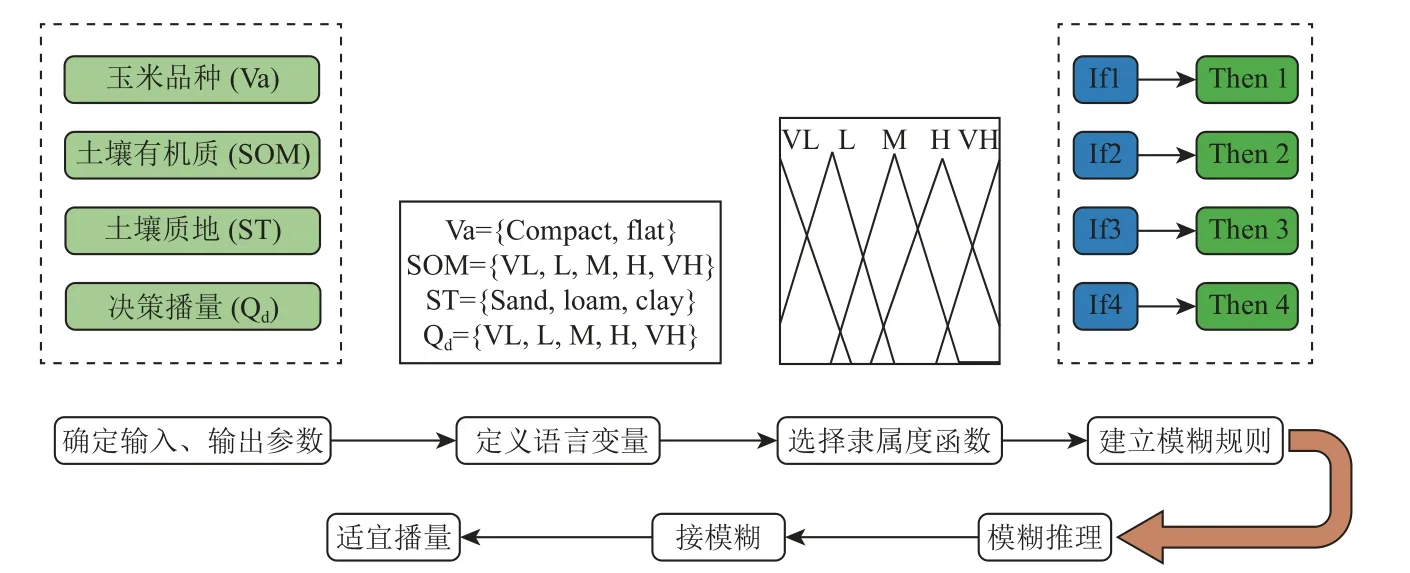
图1 基于模糊推理的播量决策系统Fig.1 Seeding rate decision system based on fuzzy inference
3.2.2 基于田间试验的决策方法
基于模糊推理的决策方法虽然简单可靠,但无法得到最佳播量且易受主观因素的影响,要得到最佳播量必须建立播量决策模型,因此,提出了基于田间试验的决策方法,为今后进行播量决策试验提供参考。
播量决策试验的基本思路为利用施加有机肥的方法在养分含量较低且分布较均匀的试验田人工构造多个不同梯度的肥力区域,在各个肥力梯度下开展不同种植密度的田间试验。播量决策试验方案可分为试验地点的选取、基础养分调查、施肥小区的划分、试验田的整备、施肥后养分调查、人工播种、播种小区的划分、收获测产等环节,如图2 所示。首先在玉米主产区选取具有典型气候特征的试验地,在可操作的范围内尽可能选取地形平坦、肥力较低、养分分布相对均匀、面积较大的试验田进行试验;对试验田的基础养分(土壤有机质、碱解氮、速效磷、速效钾等)进行取样调查并绘制养分分布图,考察试验田养分分布情况;根据试验地块的基础养分分布情况和预先设置的肥力梯度合理划分施肥小区并进行人工撒肥和旋耕掩埋;对施肥后的试验田进行取样调查、绘制肥力分布图并划分肥力等级,确定不同肥力等级的试验区域;在不同肥力等级的区域划分播种小区并进行人工播种;调查玉米出苗率并进行适时的补苗和间苗,调查实际的玉米种植密度;玉米生理成熟后,按照播种小区的面积选取合适的行数进行测产。
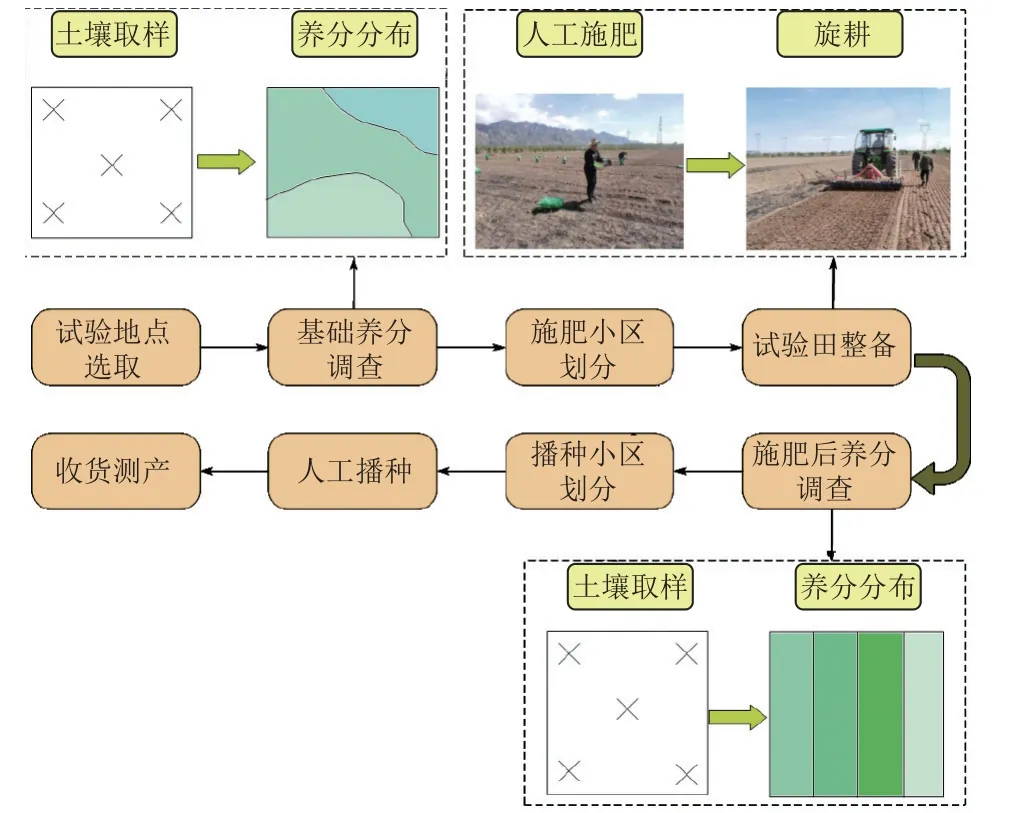
图2 播量决策田间试验设计Fig.2 Design of field experiment for seeding rate decision
通过长期的播量决策试验得到土壤肥力等级、玉米种植密度及产量数据,采用数理统计方法建立三者之间的数学模型,实现播种量的精确决策。
3.2.3 基于机器学习的决策方法
基于田间试验的决策方法需要进行长期的播种量试验,影响因素多,决策制定周期长,短时间内无法得到较为准确的播量决策模型。为克服上述问题,提出了基于机器学习的决策方法,充分利用目前已有研究成果和机器学习算法构建播量决策模型。
该播量决策方法的研究思路如图3 所示,选取推广应用较多的玉米品种作为研究材料,利用文献检索平台对目前已发表的玉米播种量相关研究进行检索,从已发表文献中摘录试验地点、试验时间、玉米品种、试验地耕层土壤有机质含量、生育期内降水量、生育期内光照时数、生育期内积温、氮肥施用量、磷肥施用量、钾肥施用量、播种量及产量数据,作为构建玉米产量预测模型的数据。将试验数据划分为训练集、验证集和测试集并设计数据增强方法,制备用于训练深度神经网络的高质量数据,以光照时数、积温、降水量、土壤有机质、施肥量、播种量为模型输入,以产量为模型的输出构造基于环境因子的玉米产量预测模型[81-83],将土壤有机质作为产量预测模型的输入变量之一使得模拟作物潜在产量对土壤有机质含量的响应成为可能。基于此模型进一步探究不同土壤有机质下玉米产量随播量的变化规律。将光照时数、积温、降水、施肥量根据实际情况设置为适宜的数值,通过设置一系列土壤有机质梯度和播种量梯度,利用玉米产量预测模型模拟不同有机质和播种量下的玉米籽粒产量变化规律,对有机质、播量和预测产量数据进行回归分析建立有机质-播种量-产量数学关系,从而得到最佳播种量决策模型,实现基于土壤有机质的玉米播种量决策。
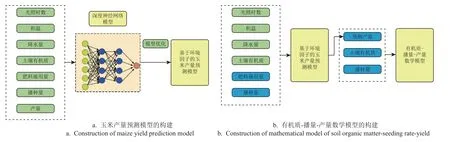
图3 基于机器学习的播量决策模型构建Fig.3 Construction of the decision model of seeding rate based on machine learning
4 播量精准调控技术
依据作业区域进行播量的精准调控是实施变量播种的最终环节,播量调控效果直接决定播种作业质量。为实现播种作业过程中实时快速精准的播量调控,国内外科研机构和农机企业开展了对变量播种控制系统的研究。本节在阐述国内外变量播种控制系统研究现状的基础上,对播量调控过程中存在的目标播量调整位置与实际调整位置不一致的问题及补偿算法进行总结和分析。
4.1 变量播种控制系统
变量播种控制系统是实施播量精准调控的载体,主要由人机交互界面、控制器、卫星定位系统、通讯单元以及能够实现株距实时精准独立调节的播种单体组成。美国Precison Planting 公司基于20/20 SeedSense 控制器开发了变量播种控制系统。20/20 SeedSense 控制器通过接收GPS 信号获得播种单体的位置,通过FieldView 软件读取和查询对应位置的播种量,利用CAN 通讯将播种量下达给单体控制器,控制排种器驱动电机实现播量的调节。该控制系统采用单体控制器实现对播种单体各单元的控制,采用CAN 通讯的方式实现播种行数的灵活拓展。该系统除可实现基于处方图的变量播种以外,将WaveVision 传感器、DeltaForce 传感器、SmartFirmer 传感器与单体控制器相连可分别实现播种质量检测、播种下压力检测以及基于传感器的变量播种[84-85]。美国John Deere 公司生产的SeedStar™2 播种控制系统[86]采用GPS、雷达和光电传感器3 种测速方式,光电传感器用来校准雷达或GPS 的速度信息,当GPS 或雷达信息丢失后可短时间内维持系统正常作业。此外,该控制系统采用液压马达驱动排种器,采用转速传感器检测马达转速并实时反馈给主控制器,实现液压马达的闭环控制。
除以上农机领航企业所研制的整套变量播种控制系统外,国外其他农业相关企业也纷纷涉足变量播种控制领域,研制变量播种控制系统的核心—控制器,提高市场竞争力。该类产品普遍具有较强通用性,与不同机具配套使用,可完成多种农田作业,对上述变量播种控制产品进行总结,如表6 所示。
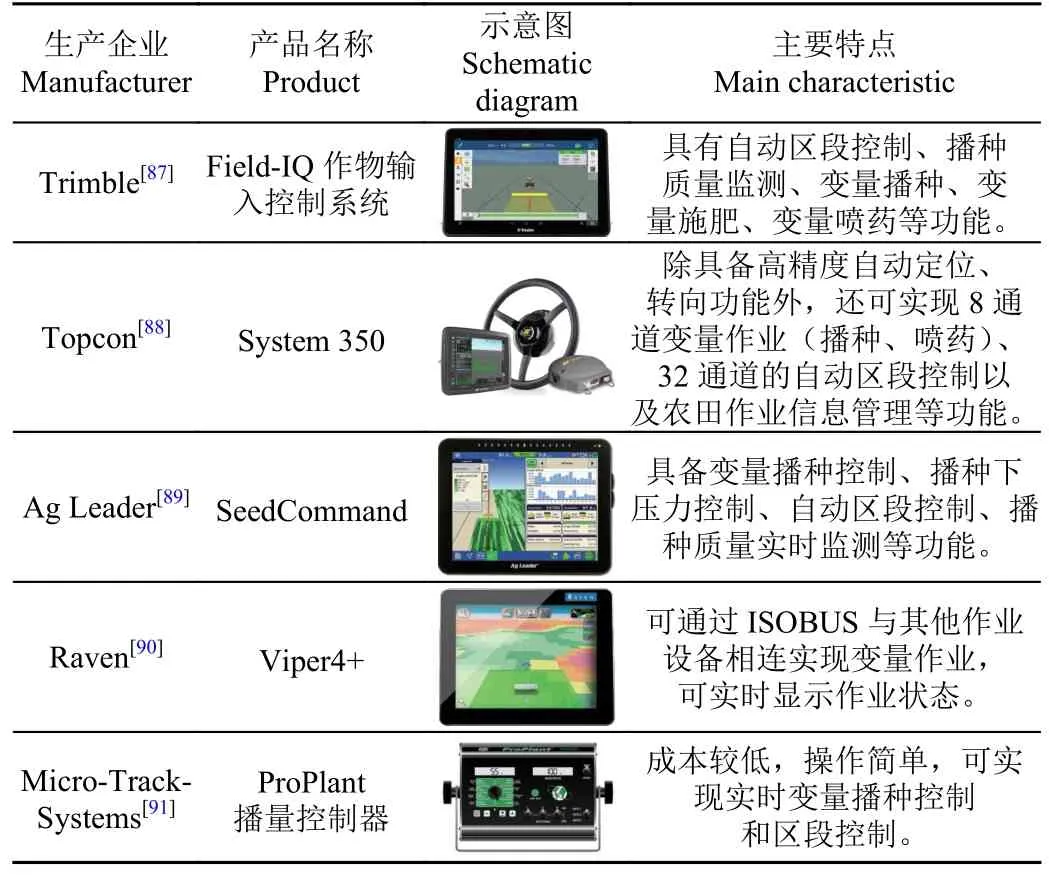
表6 国外企业研发的变量播种控制相关产品Table 6 Variable-rate seeding control related products developed by foreign companies
中国对智能播种作业装备的研发起步较晚,对变量作业所需的播量决策技术、处方图构建技术等核心技术涉及甚少,主要集中在电驱精量播种控制系统的研究。国内主要从作业速度检测、排种器驱动方式以及控制系统架构优化等方面对电驱播种控制系统展开研究[92-97]。作业速度检测是电驱排种系统中的重要环节,对国内电驱排种系统的测速方式进行总结,如表7 所示。电驱排种系统的测速方式主要包括霍尔传感器测速、编码器测速、雷达测速以及采用卫星定位系统测速4 种方式。其中,采用将霍尔传感器或编码器安装于地轮或拖拉机从动轮测速的方式易受到地轮打滑的影响导致播种质量变差。和贤桃[94]设计了一种电驱气力式精量排种控制系统,与其他研究不同,该控制系统可通过触摸屏输入作业时的滑移率,利用算法对测量速度进行补偿,从而消除地轮打滑对作业速度检测的影响,提高了高速作业下的播种质量,此外,研究发现步进电机在高速作业下转矩损失较大,易导致播种质量变差。将滑移率纳入测速模型虽然提高了测速精度,但是每次作业前需要对作业地块的滑移率进行测量,增加了测速成本。为解决以上问题,国内学者研发了以雷达、GPS 和北斗导航系统为测速单元、以STM32 单片机为控制核心、以无刷直流电机或液压马达为驱动源的电驱排种系统。雷达、GPS 和北斗导航系统与地轮不接触,避免了地轮打滑对作业速度测量造成的影响,同时采用电机或液压马达驱动排种器避免了地轮打滑、链条振动对排种质量的影响,提高了排种粒距均匀性。
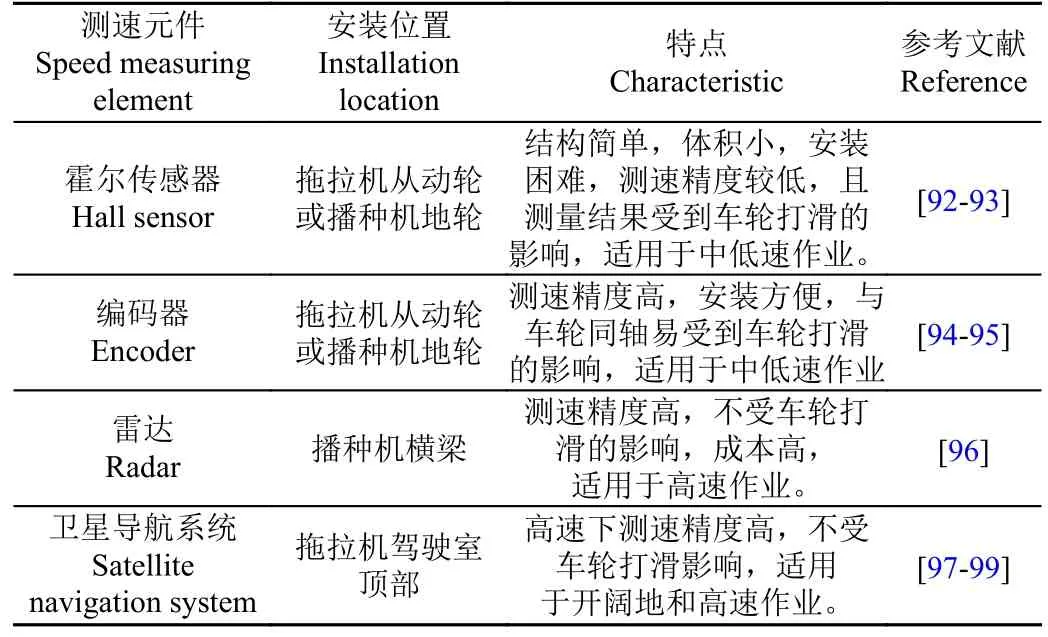
表7 电驱排种系统的测速方式对比Table 7 Comparison of speed measurement methods of electricdriven metering system
HE 等[100-102]在电驱式玉米精量排种控制系统的基础上,提出了基于Android 的处方图构建方法,建立了变量播种控制系统决策模型,设计了基于处方图的变量播种控制系统。该控制系统通过GPS 检测作业速度、作业位置、航向角等信息,并将其传输至通讯控制器进行数据解析,通讯控制器将解析后的信息传输至搭载了变量播种APP 的Android 平板,APP 利用拖拉机的作业状态信息和播种单体定位模型计算得到各播种单体的地理坐标,然后根据坐标信息在处方图中查询和读取对应坐标下的播种量,结合播量-转速模型,计算得到各播种单体的电机转速并将其传输至通讯控制器,控制器通过CAN总线将各单体转速信息传输至电机驱动器,电机按照指定转速带动排种器排种,完成变量播种作业。同时,为减小播种距离滞后问题对变量播种作业质量的影响,提出了播种距离滞后补偿算法。田间试验表明,在作业速度10 km/h、株距为14 cm 的条件下,该变量播种控制系统的平均播种量精度为99.6%,平均播种量变异系数为0.29。开启播种距离滞后补偿后,滞后距离由未开启的1.7 m 减少至0.57 m,效果显著。
4.2 播种滞后补偿算法
变量播种作业过程中存在播种量实际调整位置滞后目标调整位置的问题,目标调整位置与实际调整位置之间的距离被称为滞后距离。上述播种滞后距离产生的原因是从获取播种机作业位置、查询并读取播种量、发送播种量至电驱式播种机单体、电机转速改变实现播种量调整的过程需要一定的时间,而播种机是动态作业,因此会导致当播种机完成播量调整时已经离开了目标调整位置,且在高速作业下,该问题对变量作业效果的影响尤为突出。
为缩小或消除变量播种作业过程中播种量目标调整位置与实际调整位置之间的距离,提高变量作业的精度,研究学者提出了播种滞后补偿算法。HE 等[100-103]利用GPS 和播种机的结构尺寸建立了播种单体定位模型,利用该定位模型可得到播种单体精确位置。为消除滞后距离对变量播种作业质量的影响,将播种单体的定位位置沿前进方向补偿距离s,并通过播种单体定位模型求得补偿后的各单体坐标,根据此坐标从处方图获取对应播种量,便可实现目标调整位置和实际调整位置的重合,田间试验表明采用滞后补偿算法后播种滞后距离最大可减少1.95 m,效果显著。
播种滞后补偿算法的本质是通过对系统响应时间和作业速度的测量来实现目标调整位置和实际调整位置的动态匹配。提高系统响应时间和作业速度的测量精度可进一步优化补偿效果,提高变量作业质量。
5 结论与建议
5.1 结论
对支撑变量播种技术的土壤肥力指标精确获取技术、最佳播量决策技术和播量精准调控技术的发展现状进行总结分析,可得到以下结论:
1)在土壤肥力指标快速检测方面,国外基于电磁感应技术、电流-电压四端法、光谱分析技术探索了多种土壤指标的检测方法并研发了多种动态检测设备;国内目前仍停留在对土壤肥力指标原位动态检测的理论研究阶段,能够实现动态检测的相关设备较少。未来将呈现基于近地传感的机载式原位动态检测为主、基于遥感的广域快速检测为辅、基于星地多源信息融合的高精度检测协同发展的趋势。
2)在土壤肥力指标空间分布精准表达方面,主要集中在不同方法对插值或分类质量的影响,基于地统计学的克里格法和k 均值聚类法分别是研究和应用最多的土壤属性空间插值方法和农田管理区划分方法。对于土壤属性空间插值,根据不同的土壤属性选择合适的插值方法是获取高精度土壤属性分布图的有效途径;对于农田管理区的划分,对原始数据源进行筛选消除数据之间的相关性是提高分区精度的重要前提。
3)在最佳播量决策方面,国外开展了广泛的基于农田管理区和基于模型的播量决策方法研究;国内目前对播量决策的研究很少,开展的播量决策试验也较少,对于玉米播量的调整仍依据传统的农学经验,缺乏精确决策的手段。
4)在播量精准调控方面,国外凭借技术优势研制了多种不同架构的变量播种控制系统并投入市场,得到一定规模的应用;国内目前主要从作业速度检测、排种器驱动方式和控制系统架构优化等方面进行电驱播种控制系统的研究,还未涉及变量播种核心技术。
5.2 建 议
为缩小国内与国外在玉米变量播种技术上的差距,研发符合中国国情的变量播种装备,实现玉米单产的进一步提升,应加快对土壤肥力指标原位动态检测方法及装备的研究,实现土壤肥力指标的精准快速高密度获取,为变量作业提供丰富且精确的土壤属性信息;应着重对变量播种决策技术进行研究,开展广泛的基于土壤属性的玉米播量决策试验,建立试验数据查询平台,为构建基于土壤属性的播量决策模型提供数据支撑;应加强对玉米精量排种器、电驱式排种控制系统的深入研究,特别是对作业速度高精度检测方法和无刷电机高精度控制算法的研究,研制具备高排种质量、高响应速度的玉米精量播种单体,为变量播种作业提供坚实基础。
猜你喜欢
农业科技通讯(2023年1期)2023-02-12 07:08:10
河南农业·综合版(2021年2期)2021-03-24 11:27:38
河南农业(2021年2期)2021-03-14 10:06:34
湖北农业科学(2020年22期)2020-12-18 07:32:08
农民致富之友(2019年30期)2019-10-21 04:53:16
河南农业(2018年12期)2018-12-05 08:06:22
西藏农业科技(2018年4期)2018-04-25 06:39:34
西藏农业科技(2018年4期)2018-04-25 06:39:26
浙江农业科学(2016年11期)2016-05-04 04:16:39
茶叶(2014年4期)2014-02-27 07:05:15
