汽车智能化车灯控制系统方案和软件方案设计
2023-07-13 10:14黄常清罗诗明杨才生兰金耀
时代汽车 2023年13期
黄常清 罗诗明 杨才生 兰金耀


摘 要:随着LED前照灯的集成度和复杂程度及智能化程度的提高,汽车LED前照灯驱动面临着提高效率、简化设计、和降低成本等诸多挑战。本研究提出了一种性能稳定、性价比高、能耗低、驱动效率高、智能化高、集成度高LED驱动方案,并对该驱动方案的关键参数、相关的技术方案进行优化设计和研究。该项研究在汽车LED前大灯驱动电路领域具有降本增效、提升用户的体验感和整车行驶安全性的重要意义。
关键词:LED前照灯 驱动 智能化 驱动效率 能耗
1 概述
随着社会的进步和技术的发展,以及物质生活水平的提高,消费者对汽车的要求不再是基本的功能需求,而是要求汽车更加智能化、更加的富有科技感和创造性。以此同时,随着车辆智能化发展,人车互动是实现车辆智能化和人性化的必要手段。用户可以自主选择车辆灯光的迎宾效果及点亮形式,那么将极大丰富车辆灯光的律动形式,提升了人车互动的体验感。智能动感灯光(迎宾灯光秀)作为最直观提升科技感的配置,可实现灯光随音乐而跳动;多种照明模式作为对远近光的补充。智能化车灯与ADAS自动驾驶系统紧密结合,可以实现自动智能的大灯照明形式。然而随着LED前照灯的智能化程度、集成化程度的提高,LED前照灯驱动电路的设计在成本、可靠性、EMI等方面提出更高的要求。如何设计一种性能稳定、性价比高、能耗低、驱动效率高、智能化高、集成度高LED驱动方案已经成为LED前照灯驱动器领域的一个研究热点。诸多专家学者通过模糊控制的方法对方向盘转角、车速与车灯转角的关系进行研究,研究表明,通过模糊控制,可以提高AFS工作穩定性,减小过度偏角,提高前大灯的使用 寿命和工作精度[1,2]。孟昭军等[3]、赵寒等[4]介绍了通过CAN总线通讯实现前照灯的AFS功能。研究表明通过CAN总线技术可以实现前灯向左或向右转动。倪彰等[5]介绍了通过CAN总线实现车灯的控制,研究表明通过CAN总线可以实现车灯的精准控制。金平等[6]介绍一种尾灯解锁和闭锁迎宾音乐律动的控制方法,研究表明,通过BCM提供硬线解锁闭锁信号可以按照预先设定好的点亮时序、点亮形式进行解锁闭锁律动,但不能进行在线更新、升级。尽管很多专家学者从CAN总线技术和模拟控制方面对智能化车灯进行了研究,但仍无法解决车灯控制智能化程度控制精度不高的问题,不能实现在线升级和对每路LED精准单独点亮控制的问题。
本文基于整车CAN总线技术,和ADAS自动驾驶系统紧密结合,实现汽车车灯的智能控制和在线升级,从而实现车灯多种照明和智能动感灯光。
2 汽车智能化车灯控制系统方案
2.1 车灯与整车控制逻辑、通讯架构
车灯与整车控制逻辑、通讯架构主要包括车机、导航系统、ADAS、BCM、整车MCU控制器、智能车灯控制器、光学器件七部分组成。其中智能车灯控制器采用CAN总线与车身控制器和ADAS通讯,接收ADAS处理后传输过来的路况、车辆、行人、车速等信息来实现各种工况和环境下光束调节。车机将解析好的音频信息通过CAN总线发送灯光点亮代码控制外部灯具按照音乐节点亮和关闭,智能灯光控制器接收和识别车机发送的灯光点亮代码实现智能动感灯光。BCM控制灯光迎宾功能的开启和给灯具供电,并实现灯具按照法规要求正常点亮。如图1所示。
2.2 车灯与整车控制逻辑、通讯架构
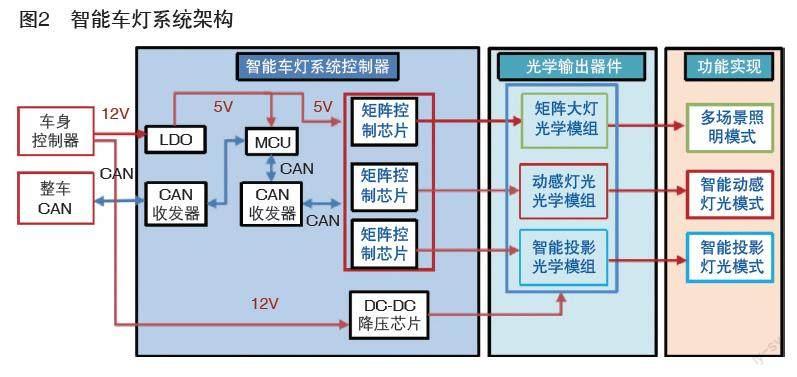
智能车灯控制器通过CAN总线与车身控制器和ADAS等进行通讯,然后将灯光的开关和控制信号传输给单片机,再由单片机来控制多通道矩阵式芯片来控制车灯每个功能的点亮。该智能车灯系统可根据LED串的数量进行组合配置,可使成本更低和组合更为灵活。矩阵控制芯片可精准的控制每个LED的点亮,从而实现智能动感灯光、多场景照明、智能投影灯光等功能。智能车灯系统架构见图2所示。
2.3 软件架构
智能车灯控制系统软件架构主要包括AAP层、RTE层、BSP层。软件架构如图3。
(1)APP层负责接收、发送整车CAN信号数据,包括解析从整车输入的数据、打包反馈数据上送到整车。
(2)RTE层通过CAN总线系统、MCUI/O口、LED驱动和反馈信号实现任务管理。同时处理OTA升级功能、MCU工作模式转换以及异常状态监测。
(3)BSP层中CAN总线数据收发通过MCU和CAN收发器来实现;LED驱动通过MCU的SPI、GPIO、ADC实现;OTA功能通过EEPROM以及UART功能实现。
3 方案设计
3.1 TVS管
汽车LED灯具的电源线最少选用 600W(10/1000μs标准波)以上的TVS管,CAN或者LIN通讯线最少选用300W(8/20 μs落雷波)以上的TVS管,寿命>10年,工作温度范围为-45℃到125℃。本研究采用的TVS为SMBJ30CA。TVS管选型参考公式(1)至(4)进行。
VRMW=1.2 X VC-max (1)
VBR=VRWM/0.85 (2)
VCmax=1.3 X VBR (3)
Pact=Vc×Iact×Δ (4)
式中:VRMW为最大反向工作电压,VBR为反向截止电压,VCmax为最大箝位电压,Pact为最大瞬态浪涌电压。
3.2 单片机
智能车灯控制器的MCU应满足以下要求:内核≥32位,主频≥64MHz,FLASH容量应≥128KB,RAM≥64KB。智能车灯控制器的MCU,至少包含2路CAN通信接口、3路SPI通信、6路USART、3路I2C配置、多路通信接口。因此智能车灯控制器的单片机采用芯旺微的KF32A156单片机。
3.3 矩阵芯片
矩阵芯片的选择需要综合考虑LED的驱动电压、驱动电流、LED的颗数及智能车灯系统的总功率。
3.3.1 用于多场景照明模式的矩阵芯片
多场景照明模式主要通过控制远近光光学模组的LED亮灭进行,近光采用12颗3W,远光采用12颗3W,远近光每颗LED的电流为1A,驱动电压为3V,总功率为72W,因此矩阵芯片选择MPS的MPQ7240。
3.3.2 用于智能动感灯光的矩阵芯片
智能动感灯光通过控制日行灯/转向灯/位置灯的LED亮灭进行,日行灯/位置灯采用48颗0.5WLED,转向灯采用48颗0.5WLED,每颗LED电流为100mA,驱动电压为3V,总功率为24W,因此矩阵芯片选择MPS的MPQ7225。
3.3.3 用于智能投影燈光的矩阵芯片
智能投影灯光主要通过控制多颗(1000颗以上)0.2W的LED的亮灭进行控制,每颗LED的电流为10mA,驱动电压为3V,总功率为20W,需要通道数多,因此矩阵芯片选择ISSI的IS31FL3747。
4 智能车灯控制系统的主要参数
(1)多场景照明模式的主要参数如表1。
(2)智能动感灯光的主要参数如表2。
(3)智能投影灯光的主要参数如表3。
5 结语
本文介绍了一种智能化程度高,性价比高的、驱动效率高、集成度高的智能车灯控制系统,通过该系统可以实现智能动感灯光、多场景照明灯光、智能投影灯光,并对硬件方案和软件方案进行了优化设计。
参考文献:
[1]张新,黄生豪,高洁.AFS自适应汽车前大灯模糊控制系统设计[J].长沙理工大学学报,2014,11(02):67-73.
[2]郭全民,杨惠,王健.汽车LED前照灯智能控制系统设计[J].西安工业大学学报,2015,35(05):365-372.
[3]孟昭军,李月,周振超,朱海.汽车智能LED前照灯照明系统控制设计[J].辽宁科技学院学报,2014,16(04):1-3.
[4]赵寒,朱恒伟.汽车智能LED前照灯照明系统控制设计[J].河北农机,2016(12):48-49.
[5]倪彰,范鑫,潘茂辉,张成松.基于CAN总线的电动汽车车灯控制系统设计[J].传感器与微系统,2011,30(12):82-84.
[6]金平,马良,李志刚,滕云鹏,孙睿,盛红金,贾梦池.一种新型乘用车解闭锁时后尾灯律动灯光控制方法[J].汽车电器,2020(03):24-26-31.
猜你喜欢
军事文摘(2022年19期)2022-10-18
昆钢科技(2022年2期)2022-07-08
汽车实用技术(2022年7期)2022-04-20
当代水产(2021年10期)2022-01-12
建材发展导向(2021年23期)2021-03-08
房地产导刊(2020年11期)2020-12-28
印刷工业(2020年4期)2020-10-27
铁道通信信号(2019年4期)2019-10-10
华人时刊(2018年15期)2018-11-10
中国交通信息化(2017年4期)2017-06-06