一种红树林智能植树机器人的设计
2023-07-12 08:30刘孝贤钟宇明陈衍艺陈煜静
南方农机 2023年14期
刘孝贤 , 余 江 ,钟宇明 ,陈衍艺 ,陈煜静
(1.广东海洋大学机械与动力工程学院,广东 湛江 524088;2.广东海洋大学电子与信息工程学院,广东 湛江 524088)
人工造林效率低、速度慢且劳动强度大,而机械化造林则是大势所趋,不仅可以提高劳动效率、减轻劳动强度,还能保证造林质量、降低生产成本、提高经济效益。但大多数植树机器人仅适用于硬质泥土或沙地,而红树林以沿海滩涂地形为主,机器人若以传统轮子作为行进结构,在行进过程中易陷入淤泥,目前还没有专适用于红树林地形植树的机器人。基于红树林以滩涂地形为主的特点,以同步带为行进机构的红树林植树机器人,可有效实现机器人一体化种植过程。因此,本研究通过对机器人结构、材料等方面进行分析,采用科学的结构设计方法,合理选材,结合滩涂地形特点,设计了一种红树林智能植树机器人。
1 机器人植树全流程动作简要说明
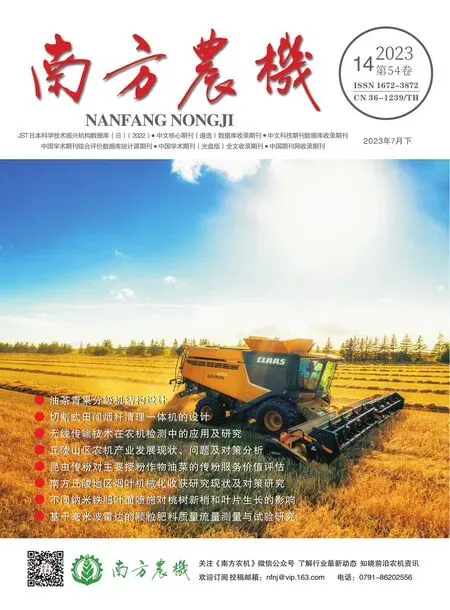
机器人整体外形结构如图1 所示。机器人首先移动至合适的植树点,接着机器人中部的钻头机构向下钻出待植树的树坑,完成钻孔工作后,机器人会自动收起钻头,接着机器人底部的光电传感器启动,机器人缓缓向前移动,当检测到树坑时停止前进,再缓慢移动调整至树苗对准树坑,并由光电传感器通过把光强度的变化转换成电信号的变化来实现控制[1]。因此,在机器人向前移动时,底部的红外光电传感器会不断检测光线的强度变化,以精准地找到挖好的树坑。接着树苗底部的开门板打开,树苗通过回填装置落入树坑中。待树苗完全落入树坑后,压泥板向下按压存放在回填装置中的泥土。在按压过程中,泥土通过回填装置上的小孔卸往地面,填满树坑内的空隙,为刚植入的树苗完成回土。上述过程完成以后,机器人继续移动,前往下一个合适的植树点。
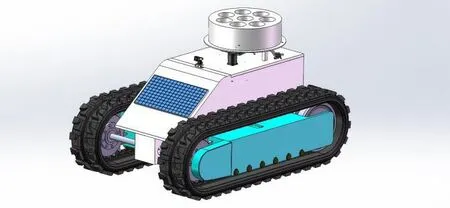
图1 机器人整体外形结构
2 机器人各机构设计
2.1 同步带机构设计
目前,大多数植树机器人仅适用于硬质泥土或沙地,而红树林以沿海滩涂地形为主,机器人若以传统轮子作为行进结构,在行进过程中易陷入淤泥,造成行进困难、车轮受损等。因此,本设计采用同步带轮,本同步带式植树机器人有以下特点:1)结构紧凑,支撑面积大,下陷度小,适于松软或泥泞场地作业;2)传动比恒定,效率较高;3)支撑面上有履齿,不易打滑,爬坡能力强,有利于发挥较大的牵引力;4)具有良好越障能力。
行进机构如图2 所示。同步带机构采取轻量化设计,由一个主动同步带轮、一个从动同步轮和6 个托带轮组成,搭载一个三相马达减速器及一个精密转向器;减速器与转向器由梅花联轴器连接。6 个托带轮支撑起同步带整体的形状,提供足够的初拉力,降低滑差率。机构外侧采用全包裹外壳保护,避免淤泥对构件造成损害。与传统轮子相比,同步带具有接地面积大、爬坡能力强、转弯半径小和跨沟越障能力强的特点,使机器人能够适应红树林滩涂地形[2]。同时,本同步带表面设计有纹路,可以增大与地面的摩擦力,使得机器人在运动过程中不易打滑,为机器人的运动提供更多的动力。同步带轮内外侧安装有挡板,可有效防止在机器人行进过程中泥土及其他物质被卷入,对履带或其他结构造成损害。
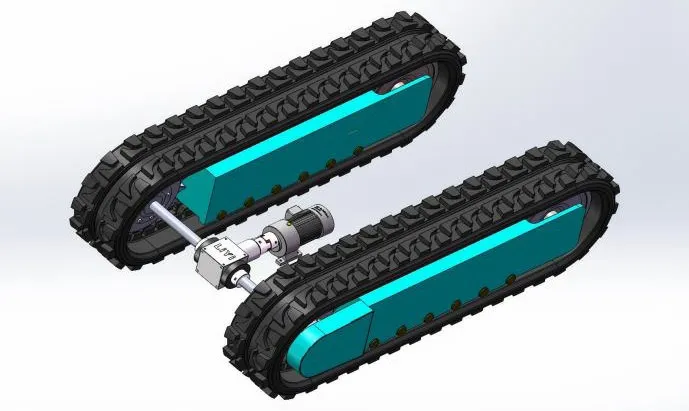
图2 行进机构
2.2 钻孔机构设计
钻孔机构如图3 所示。钻孔机构由轴承导柱、丝杆、梅花联轴器、换向器、步进电机、永磁直流电机以及一个可根据种植树苗的根茎大小进行更换的螺纹钻组成。螺旋钻头是由若干个截齿构成的整体型钻头,钻头的受力取决于各个截齿的受力[3]。钻头动力装置采用永磁直流电机,具有动力大、性能稳定、噪声低以及省电耐用等特点。永磁直流电机和螺纹钻通过梅花联轴器和换向器连接,导柱和丝杆两端固定,组成一个可纵向运动的丝杆升降机平台,平台上安装有螺旋钻,传动装置采用步进电机,具有扭矩大、转动角度精准等特点,其带动钻头纵向运动时可以精确定位升降的高度。蜗轮丝杠升降机是一种体积小、使用灵活、结构紧凑、可靠、寿命长、安装方便的机械产品,常用于相错轴间的相错角为90°的传动[4]。电机和螺纹钻之间组成的钻孔机构采用转向器与电机连接,改变了电机传输的力的方向,在节省空间的同时又不影响螺纹钻的正常运作。
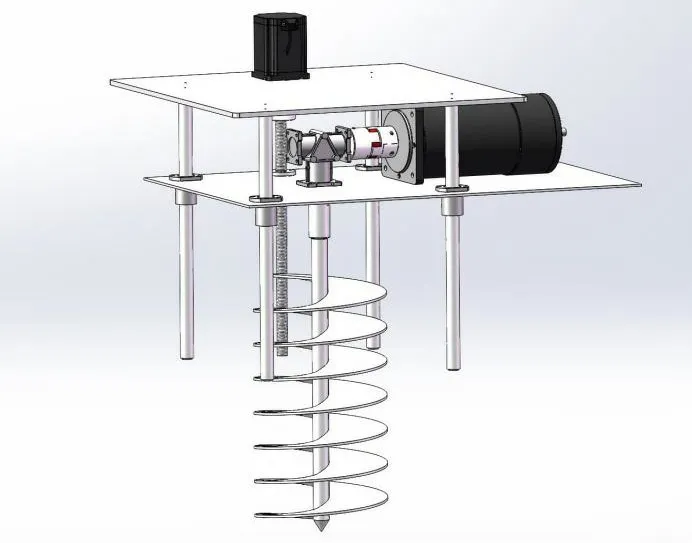
图3 钻孔机构
钻孔机构工作原理:当植树机器人确定好植树的位置后,直流电机启动,通过传动装置控制钻头转动起来,当达到合适的转速时,蜗轮丝杆升降机启动,经过蜗轮蜗杆减速电机的调速将回转数减至所需的值,得到较大转矩,并控制钻头平台缓缓下降,同时钻头钻入泥土中。当平台触碰到机器底板的触碰开关时,控制钻头的直流电机停止转动,升降机反向旋转将螺纹钻拔出,在拔出螺纹钻的同时,一同将泥土一起向上拔出,最后留出一个待植树的坑。
钻孔直上直下的特点使空间更加节省,控制调试方面也更加方便。钻孔机构安装在机器人的中部,使机器人在钻孔时更加稳定,同时在钻头拔出的过程中机器人整体受力均匀,不易发生侧翻等情况。钻孔的螺纹钻可根据树苗的根茎大小进行切换,适用于多种尺寸的树苗,提高了树苗安放的成功率、树苗成活率以及该植树机器人的利用率。
2.3 树苗安放机构设计
树苗安放机构如图4 所示。树苗安放机构由树苗安放转盘、步进电机和开门板组成,转盘上孔洞直径180 mm、深250 mm,可安放7 棵树苗,中心位置连接步进电机,可精准控制旋转角度,开门板通过齿条完成与步进电机之间的传动,实现开关门功能。步进电机作为一种受数字脉冲所控制可以进行特定角度转动的硬件器件,具有精准度高、调整速度范围大、设备控制简单等特点[5]。并且采用的步进电机体积小,还能精确定位开门板移动极限,可以在不改变工作效率的情况下,减小机器人内部空间的占用率。
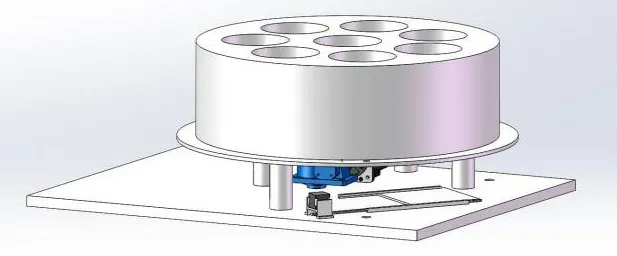
图4 树苗安放机构
树苗安放过程:当植树机器人完成挖坑后,先缓缓往前走,当安装在树苗安放机构的红外光电传感器探测到树坑时,机器人再停下与树坑精准校对,树坑校对完成后,开门板的步进电机启动,开门板打开,树苗通过回填装置主体植入树坑中。
与单个树苗装载的植树机器人相比,采用转盘装载树苗的机器人增加了树苗装载量,在提高植树效率的同时,还提升了结构空间的利用率。当一个树苗种植完成后,转盘步进电机转动控制转盘顺时针旋转,预备好下一个种植的树苗。该结构设计简单,在不降低使用效果的情况下,可同时完成整个树苗的植入过程。
2.4 泥土回填机构设计
泥土回填机构如图5 所示。泥土回填装置主要由回填装置主体、压泥板、分别控制压泥板与泥土回填平台高度升降的两部蜗轮蜗杆升降机和一个减速电机组成。回填装置主体由3D打印而成,高度为615 mm,最大处直径800 mm,最小处直径320 mm,底部有4个识别摄像头,用来识别、对齐树坑。压泥板外径为600 mm、内径为320 mm,同心铁板通过丝杆传动向下运动进行挤压泥土的动作,实现回填泥土功能。回填装置主体中“上直径大,下直径小”的结构让盛装泥土的容器能容纳更多的泥土,提高了空间利用率。加之普遍红树林树苗坑洞的体积相较整个泥土回填装置小,“上直径大,下直径小”的尺寸差能提高泥土回填的准确率,保证树苗的成活率。该结构采用减速电机,减速电机主要是通过齿轮的传动比来改变转速的,在工作时可以为泥土回填动作提供更大的扭矩[6]。
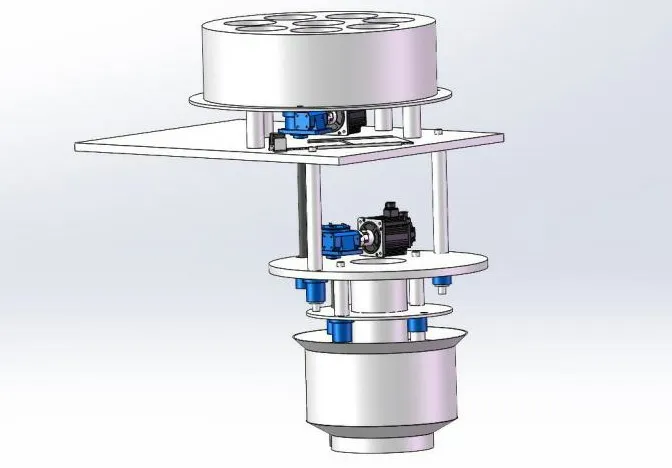
图5 泥土回填机构
泥土回填过程:回填装置中预先装好与树苗生长环境相似的土壤,当树苗掉入树坑后,STM32 单片机控制三个蜗轮蜗杆减速机运作。蜗轮蜗杆减速机是一种动力传达机构,它利用齿轮的速度转换器,将电机的回转数减到所要的回转数,并得到较大的转矩[7],从而控制泥土回填装置平台往下降至预设高度为止;此时控制压泥板的升降机运作,压泥板向下运动挤压泥土,将泥土通过由圆形环形阵列切除的细小圆盘出泥口挤压出来,挤压出来的泥土均匀细腻,减少了在泥土回填过程中对植株造成的伤害。
3 机器人结构材料选择
3.1 同步带材料选择
本机器人同步带以钢丝为抗拉体,外面包覆橡胶而组成,比钢履带更具耐腐蚀性,不仅可以增加在滩涂地形移动的受力面积,而且重量也比较轻,有利于植树作业的进行。其他的紧固件等采用达克罗涂层处理来满足耐腐蚀的需求,该涂层有非常优良的耐蚀性和高温化学稳定性,涂层中具备多孔结构,能够提升涂层的耐腐蚀性[8]。
3.2 钻头材料选择
螺旋钻头主要选用锰钢来制作,锰钢具有质地坚硬、强度高和韧性良好等特点,对于硬土质、超硬土质、黏土、冻土等土质都能正常工作,扩大了对多种土地的覆盖范围,提高了钻孔效率。锰钢硬度高的特点可以克服大部分钻孔问题,在提高机器人的钻孔效率的同时,可提高树苗的成活率。
3.3 树苗安放机构材料选择
树苗安放机构和泥土回填机构用氧化铝陶瓷材料制作,氧化铝陶瓷具有硬度高、耐腐蚀、耐磨损、电绝缘性好等一系列优良的物理化学性能,而且原料充足,价格便宜[9],可以延长机构的使用寿命。
3.4 外壳材料选择
红树林土壤具有高盐强酸的性质,采用耐盐碱材料可延长本红树林植树机器人的使用寿命。机器人外壳使用铝合金材料,铝合金具有密度小、强度高、重量轻、成本较低的特点,经过硬质阳极氧化处理以后,具备耐高温、耐腐蚀的特性;主要选用6061 铝合金,其具有极佳的加工性能、优良的焊接特点及电镀性、良好的抗腐蚀性与比强度等优良特点[10]。相较于同样具备耐腐蚀性的碳纤维复合材料外壳,铝合金的抗腐蚀性能很好,它在空气中能形成一层氧化膜,阻止腐蚀的进一步发生。
4 结语
综上所述,本研究详细介绍了机器人种植红树林幼苗的过程,同时提出行进机构、钻孔机构、树苗安放机构及泥土回填机构的结构设计方案。与传统植树机器人相比,本设计的机器人当完成树苗植入后可以快速回土,有效提升树苗成活率,专适用于红树林滩涂地形,可全自动完成挖坑、植入树苗、泥土回填一整套种植过程,适用于多种尺寸的树苗。
猜你喜欢
粮食加工(2022年6期)2022-12-02
小学生学习指导(低年级)(2021年3期)2021-07-21
长春大学学报(2021年4期)2021-05-17
小天使·一年级语数英综合(2021年3期)2021-05-08
润·文摘(2020年1期)2020-02-11
中外管理(2020年9期)2020-01-08
科技风(2019年2期)2019-10-21
小学生学习指导(低年级)(2019年3期)2019-04-22
制造技术与机床(2017年3期)2017-06-23
中国科技教育(2016年6期)2016-08-27