
无人机之混合电能控制器设计与电力整合
2023-07-09 06:32王绍武沈彥霖
电子制作 2023年10期
王绍武,沈彥霖
(1.平顶山工业职业技术学院,河南平顶山,467001;2.河南神马尼龙化工有限公司,河南平顶山,467013)
0 前言
随着全球节能减碳的倡导,推动电动化以提升交通运输能源使用效率与降低排放已成国际重要趋势。目前复合电能系统之类似构架已经用于电动车辆电力系统进行优化,主要是以延长续航力、节约能源、提升效率与降低成本为目标,进而达到较高整体性能与整体系统动力。为了获得最佳能源管理策略,本文采用工程直觉化设计特点的规则库控制方式,结合模糊逻辑控制复合动力系统,而无人机控制单元依照马达动力需求,控制引擎油门以及相关电子系统,达能源使用最佳化的目标。
1 复合式电能无人机软件设计
本文以DSPTMS320F28335 处理器作为无人机控制单元。而为了方便且快速地开发此DSP 程序,本文以Matlab/Simulink 软体进行主要程序撰写,并搭配Stateffow 开发各种条件判断模式。为了确保无人机之运转安全,在程序模拟方面共进行三次于不同环境下的模拟测试,第一次为当程序撰写完毕后,利用Matlab/Simulink 内置模拟系统进行模拟,确认基本参数是否有设定正确。第二次为利用Terasoft 公司所研发之快速雏型控制器Microbox 进行硬件回路(Hardware-In-theLoop,HIL)模拟测试,主要为测试当程序烧入至控制硬件后,是否会有错误发生。第三次将撰写好之控制策略烧入至微处理芯片中进行测试及控制,另在硬件前端建置多个传感器,借此透过观测系统状态而主动计算复合式电力分配比例。在确认主动式能源管理有效后,再进行无人机控制单元设计,提高实际应用之可行性。
1.1 规则库控制策略
依据无人机现有使用方式,有引擎发电机待机、无人机定点悬置与高负载等主要操作模式。定义Pd为无人机需求功率;Pg为无人机之引擎发电机输出功率。以最佳引擎发电机功率输出定值,如图1 虚线所示,当Pd> Pg,代表为复合电能输出模式,引擎发电机与锂电池系统以并联方式提供多旋翼马达电能需求;当Pd< Pg为充电模式,引擎发电机主要供给锂电池充电用,部分电能提供多旋翼马达使用。
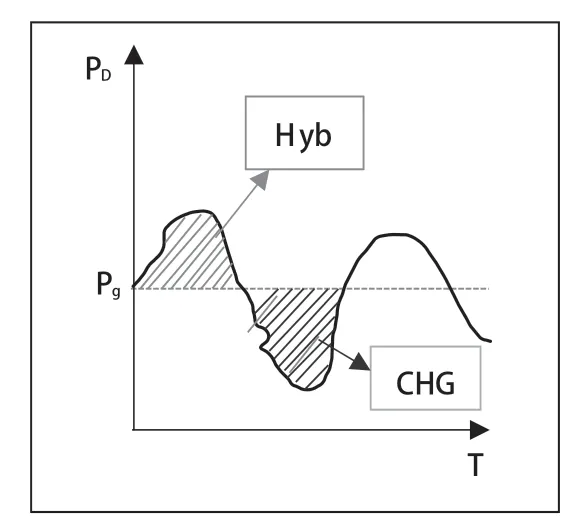
图1 无人机控制模块功率控制方案
1.2 Matlab/Simulink 模拟结果
本项目采用Matlab/Simulink 模拟环境进行测试,建构v 型验证中的Model-In-the-Loop及HIL 验证,有助于未来实际对无人机进行调校,提升无人机性能与可靠度。本模拟利用先行实测之电池能耗数据建立无人机控制单元模块如图2 所示,可计算锂电池剩余电量。
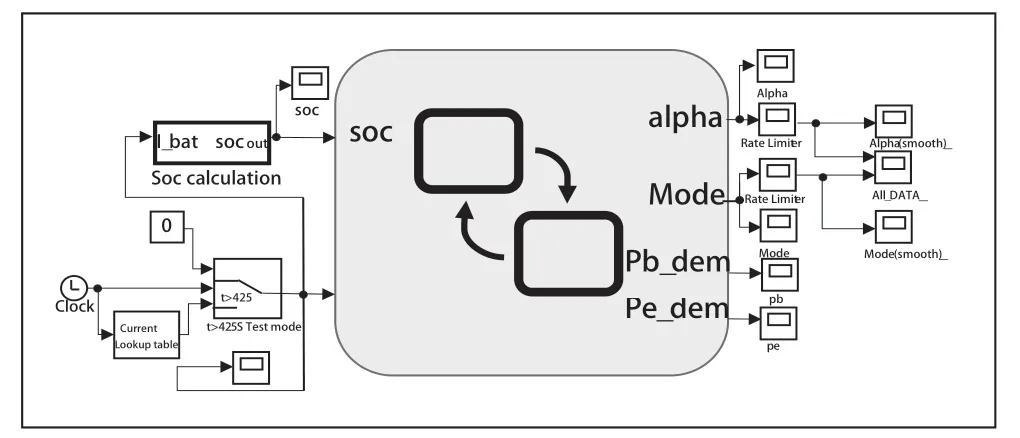
图2 无人机控制单元模块
了解无人机实际飞行所需之能耗有利本文之模式建立,经实测无人机飞行情况得知:当无人机进行拉升及回转时需较大之瞬间电流,而正常航行之工作电流约为100 如图3所示。控制策略如上节所述,利用电流及锂电池残电量大小建立规则库。规则库中分三大模式:高负载、中负载及低负载,分别以无人机引擎于不同负载区间实测之制动燃油消耗量(Brake SpeciffcFuel Consumption,BSFC)定义其油门开度(α),其中油门开度区间为0 至1 之连续数值。本阶段性能测试先将高负载之油门开度定义为1;中负载之油门开度定义为0.5;低负载之油门开度定义为0.1 进行模拟,测试总秒数为500 秒,根据电池放电电流推算之锂电池残电量。模式切换分五种模式:模式一为系统待命、引擎怠速,可随时起动之状态;模式二为低负载;模式三为中负载;模式四为高负载;模式五为安全模式,当系统无法侦测电流或SOC 低于5%时触发之模式。本测试之模拟模式结果如图4 所示,而其对应之油门开度数值如图5 所示,其中为避免模式切换过于频繁影响控制油门之伺服马达作动造成相关部件损坏,模式及油门开度之输出结果皆经过滤波处理。
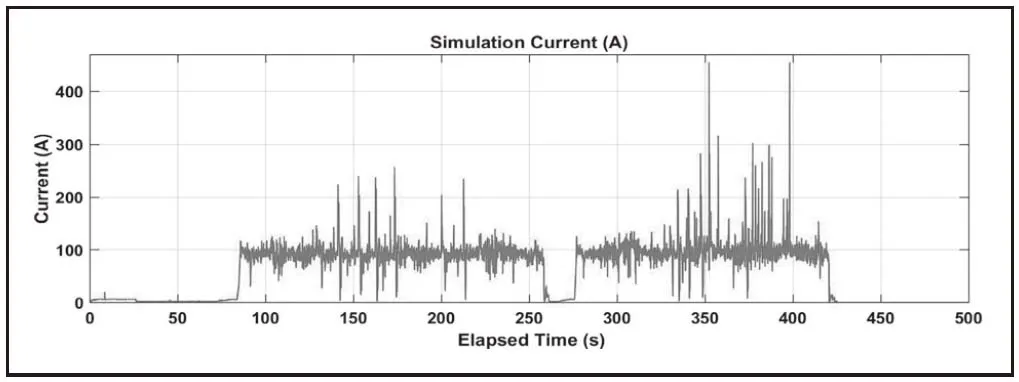
图3 无人机实测电流
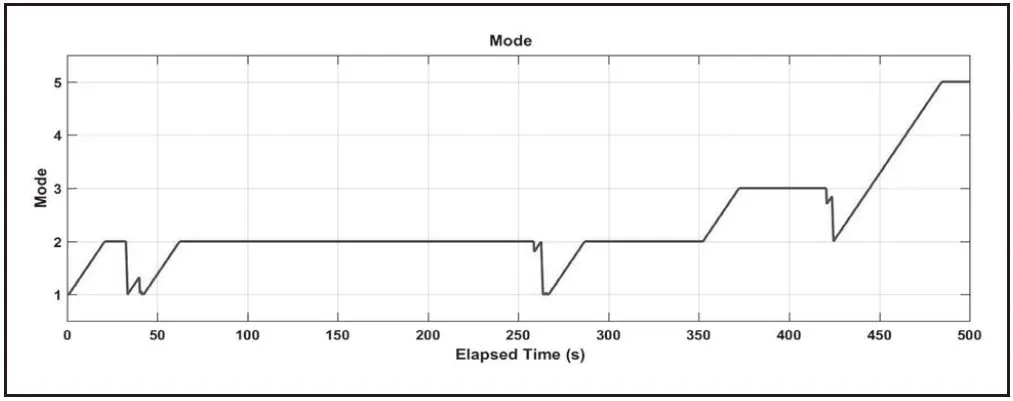
图4 无人机模块模式切换
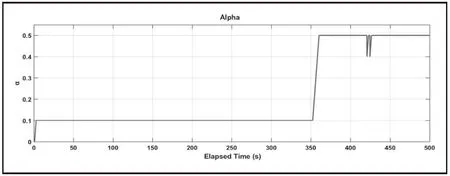
图5 无人机油门切换
1.3 HIL 模拟过程与结果
本项目利用两部快速雏型控制器Microbox 实现HIL 测试模拟,透过各别定义快速雏型控制器为能量管理控制器及整机系统控制器采用模拟讯号双向沟通的即时模拟,可于实机测试前先行检测问题并优先解决。采用两快速雏型控制器进行HIL 结果显示,模拟与实时模拟仍有0.001%误差,未来可利用降低白噪音(White Noise)方式改进。复合式动力无人机之电压与电流感测电路开发为使无人机控制单元具备过压与过流保护能力,避免DC/DC 转换模块于无人机运行过程中,因电流分配不均造成单部或多部转换模块烧毁之疑虑,本文进一步设计电压与电流感测电路用以即时将各模块之输出电流、直流链电压与电池电压电流信号回传至无人机控制单元中,使无人机控制单元监控各状态信息。除可估算电池之SOC 外,亦可避免DC/DC 电路模块因输出电压与电流之异常,造成后端无人机马达烧毁或无法预期之动作,提高整机安全性。
2 电压、电流感测以及复合式动力电能管理硬件设计
2.1 电压感测电路
本文以AD210AN 隔离放大器设计电压回 路如图6 所示,此电路所使用之AD210AN 隔离放大器提供1 至100倍的电压增益,具有精度高、成本低与体积小之优点。内部采用变压器耦合放大器构架,可对输入和输出信号进行隔离,避免测量之电压信号受到各种电磁、噪声与误差之影响。在此电路中,输入信号需先经过电阻适当分压,其分压公式为:
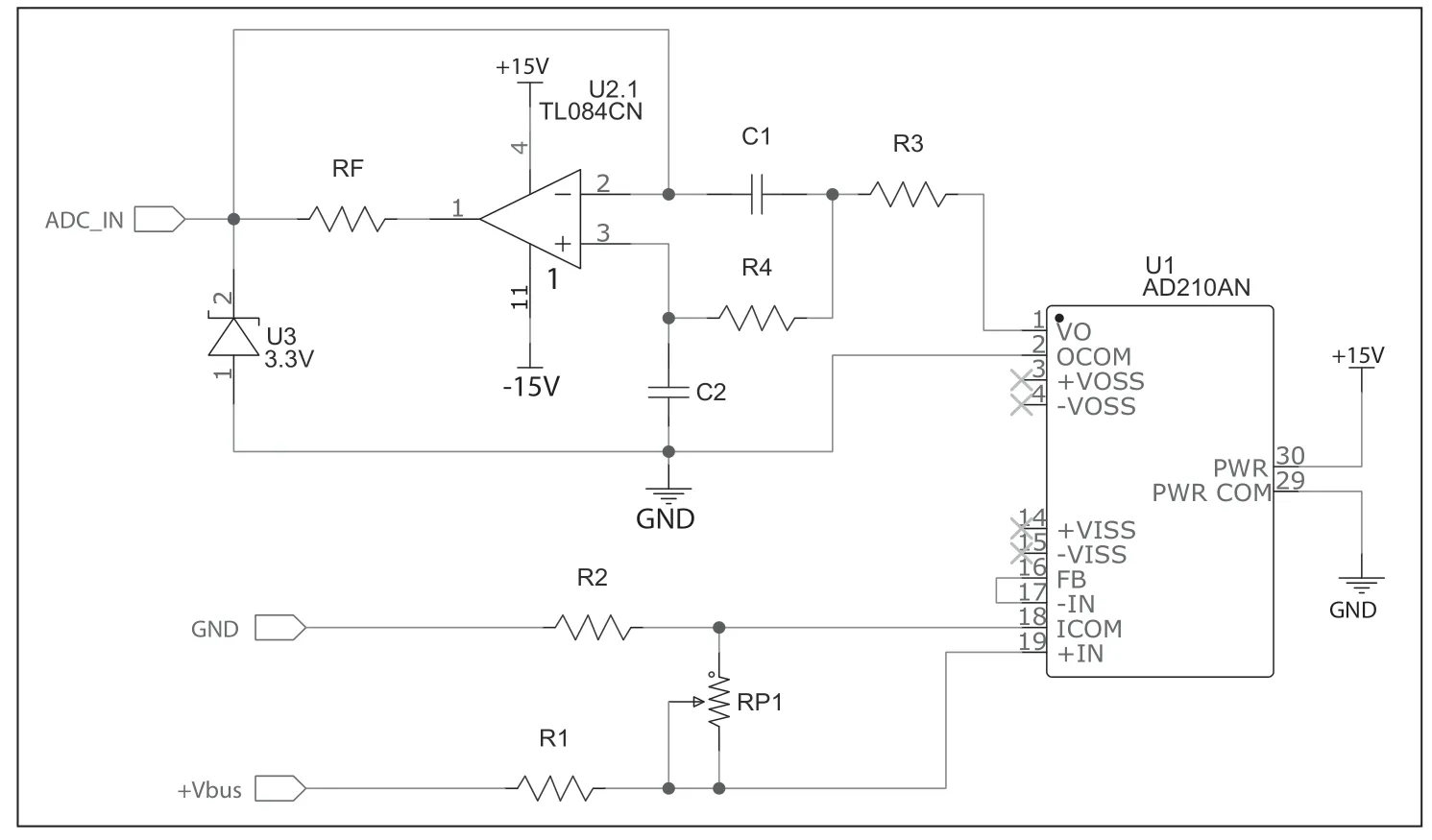
图6 电压回授电 路图
以满足TMS320F28335模拟输入电压范围0~3.3 V 之要求,其中VAD210为AD210AN隔离放大器之输入信号,Vbus为DC/DC 转换模块输出电 压,VR1、R1 与R2 为 限制电压输入范围之可变电阻与电阻。接着将由(1)式计算介于0~3.3 V 之电压信号送入AD210AN 隔离放大器中,使信号与电源隔离。后级以电阻R3、R4、电容器C1、C2 及运算放大器组成一个二阶低通濾波器,用于濾 除系统因高频切换所造成之高频噪声。由于TMS320F28335 之类比输入分辨率为10 位,因此精确度可达3.3/210=3.23 mV。最后于ADC IN 两端并联一3.3V 二极管,确保送至DSP 之电压介于0~3.3 V。
2.2 电流感测电路设计
同样为监测各转换器之输出电流,本文以LA55P 闭环路霍尔效应电流感测器设计电流回授电 路如图7 所示,用以即时回授各转换器之输出电流。LA55P 感测器之标准测量值为50 A,具有高测量精准度、良好之线性度与优异之抗干扰能力,透过M 脚位输出电流至外部电阻即可得以一模拟电压值表示之电流信号。在此电路中,将欲测量之电流穿过LA55P 之环路中,即可利用霍尔效应(Hall Effect)比例式输出一最大为60 mA 之电流,经流通至电阻R3 后可得一电压信号介于±4V 中,接着通过一非反向放大器,藉由调整VR1进行增益的调整后使模拟电压介于为0~3.3 V,其计算公式如(2)所示。
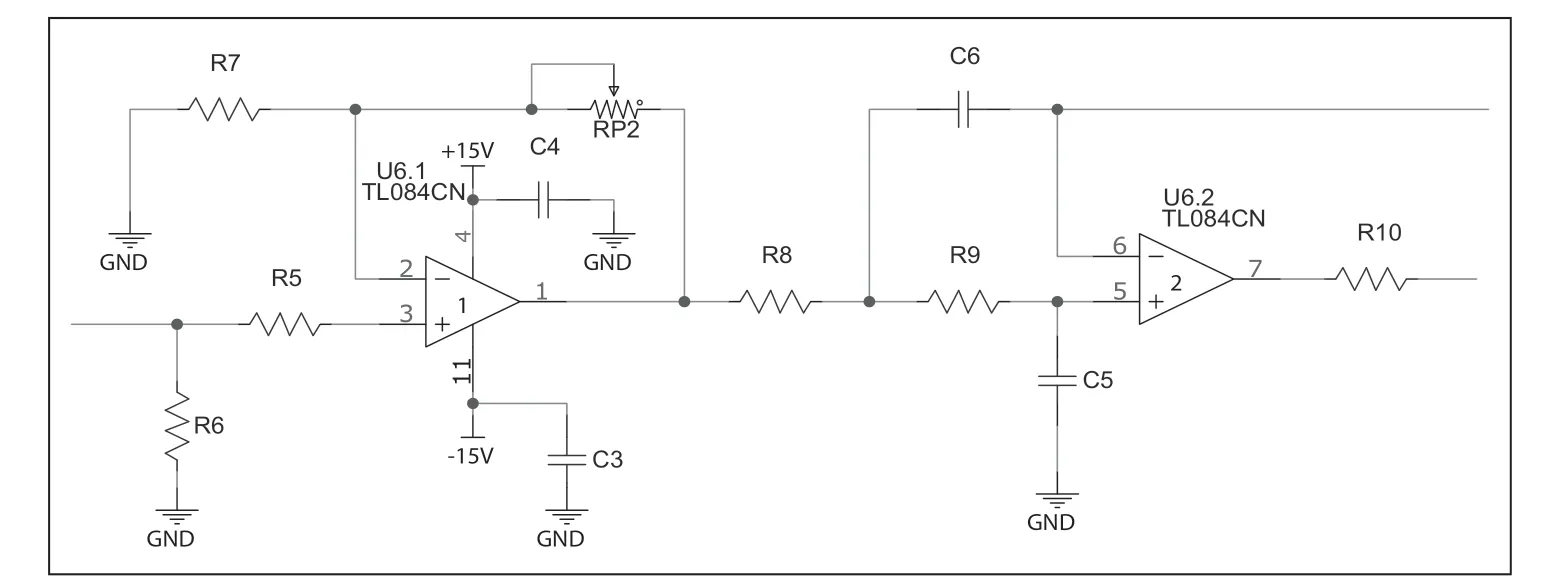
图7 电流回授电路图
其中VADC iIN为DC/DC 转换模块输出电流之滤波前回授信号、iM为LA55P 感测电流、VR1、R1 与R2 为用于调整电压增益之可变电阻与电阻。
2.3 电压电流感测电路接线规划
本研究所设计之电压电流整合感测电路则如图8 所示,电压感测电路共两组,1 组监控总电压Vo,另1 组监控电池电压,并提供信息给UAVCU 以估算SOC。另一方面,电流感测电路共7 组,其中6 组用以监控6 部2KW直流/直流转换器之输出电流,另1 组用于监控电池输出电流,以便由UAVCU 估算电池之SOC。所完成之实际电压感测电路如图10 所示,其中电压感测量测比例为0~100V/0~1.8V;电流感测电路如图9 所示,其中电流感测量测比例为0~50A/0~1.8V。
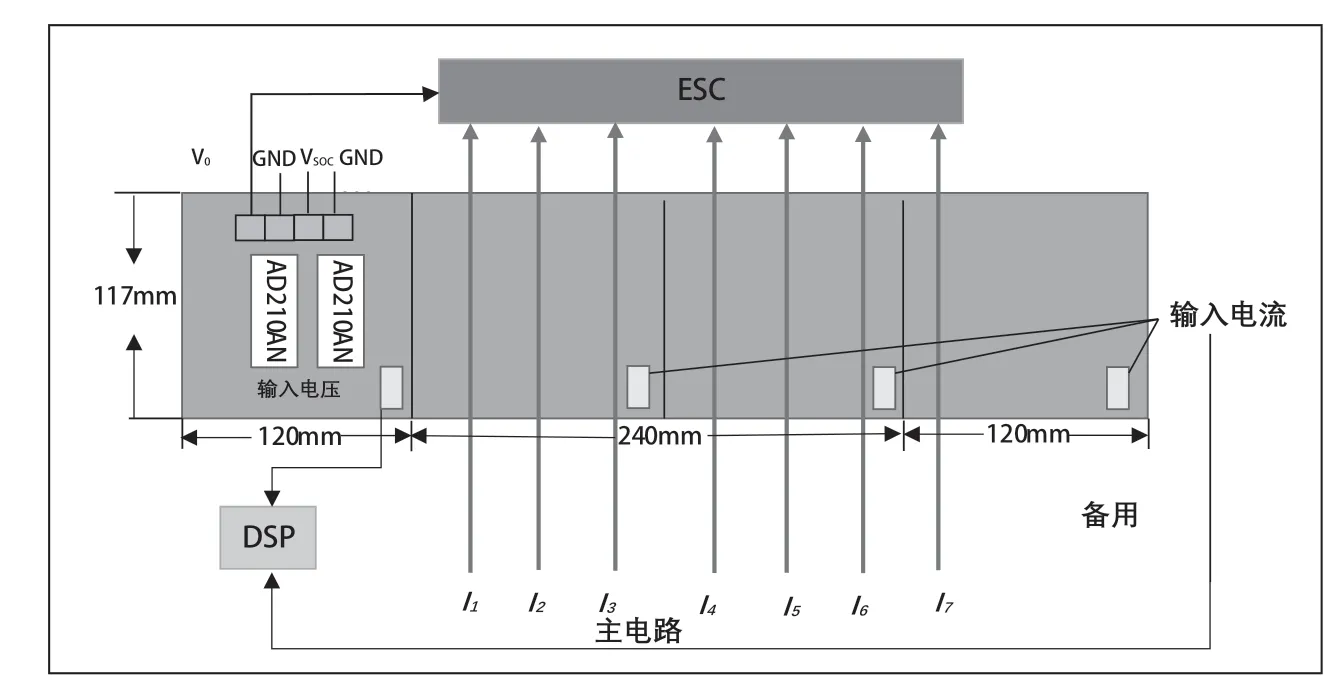
图8 电压电流感测电路接线规划
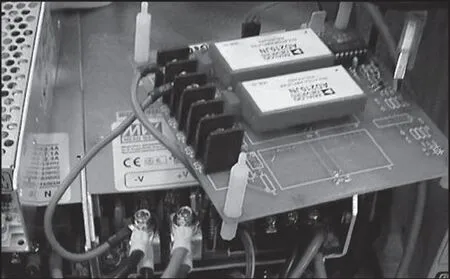
图9 电压感测板实体图
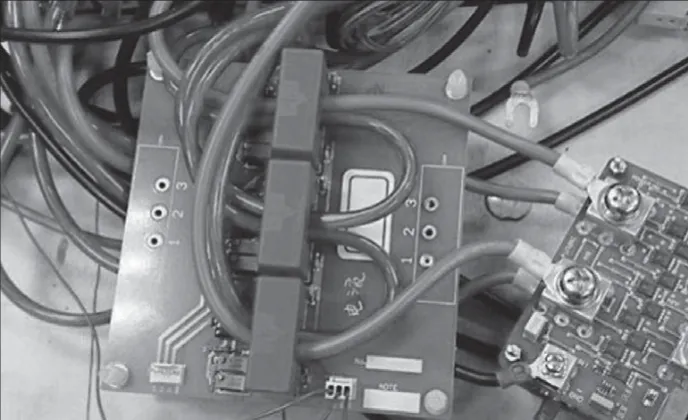
图10 电流感测板实体图
2.4 复合式动力无人机电能管理硬件设计
本文以TI DSP TMS320 F28335 实现无人机CU,其主要原因为此芯片最快运算速度可达到150 MHz,并具备丰富且数量众多之GPIO、PWM、I2C SCI、SPI与CAN 等多种信号传输功能,其中引擎油门以及节风门控制采用PWM 讯号,电压与电流值为模拟信号,另外为了避免类比/数位转换脚位于测量数值时受到干扰,须将参考电位妥善接地。最后利用电源供应器以及示波器模拟信号源,确认DSP 是否能正常工作。
3 复合式动力无人机电能管理次系统与系统整合测试
在此阶段结合上述所有部分进行系统软硬件整合,并将DSP 作为无人机CU 在实验平台上进行稳态、瞬态测试性能测试如图11 所示。系统整合测试总共分为三部分,其中第一部分因为控制引擎之节气门开度及阻风门开关,本文使用MBL-850 伺服马达,要控制其伺服马达必须给予PWM 信号,首先需要测试TMS320F28335 所输出之PWM 值,必须让伺服马达能够顺利打开节气门;另一组则是能将阻风门达到全开或全关。在此阶段要注意避免伺服马达超过其极限范围,以防马达过载过热而出现异常。第二部分是将TMS320F28335接上各感测元件,并且利用电子负载机模拟无人机在空中所会面临的状况,进行变动负载抽载模拟,如在轻载、中载及重载时引擎节气门所反映的结果进行观察及校正。第三部分为最终测试阶段,将TMS320F28335 及感测元件安装于无人机并进行试飞,并且收集各项数据进行后续之改善。
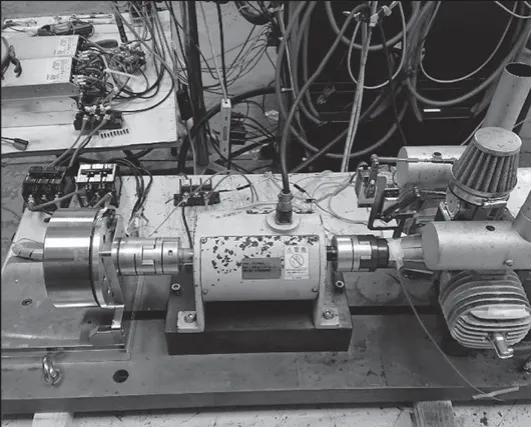
图11 无人机系统与次系统整合测试
4 结论
目前商用无人机多用于摄影及拍照所用,续航力较短,且受限于大小以及成本考察,一般商用无人机技术皆使用锂电池作为其主要能量来源,少有使用两种能源系统进行复合动力。本文主要目标为建立一具引擎发电机与锂电池复合电力之无人机系统,借以提升续航力,并解决单一电池成本过高之问题。而为了能充分发挥两种电力源特性及达到最高效率,本文发展规则库与模糊控制策略进行电力输出比控制,并且分配两种电力源作动时机。控制程序以Matlab/Simulink 程式之图像构架开发,利用DSP 作为无人机CU接收前端各种感测信号进行判断,并下达控制指令。为了避免无人机因动力不足而于高空坠落,在验证动力源方面进行多样且谨慎的测试,从最初之程序模拟测试、HIL 测试、DSP 硬件测试、动力计测试及最后的无人机上机测试,最后并收集各项信息以持续进行后续改善及修正。
猜你喜欢
岷峨诗稿(2020年4期)2020-11-18
汽车电器(2018年8期)2018-08-25
商周刊(2017年22期)2017-11-09
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
河南电力(2015年5期)2015-06-08
皖西学院学报(2015年5期)2015-02-28
发明与创新(2013年24期)2013-02-27
时代农机(2011年10期)2011-08-15
