基于拉格朗日方程的自动变速器换挡过程控制
2023-07-08 10:10:46冯巍
汽车实用技术 2023年12期
冯 巍
基于拉格朗日方程的自动变速器换挡过程控制
冯 巍
(上海汽车集团股份有限公司 技术中心,上海 201804)
为了研究自动变速器(AT)换挡过程的控制方法,文章以ZF9AT变速器为研究对象,基于拉格朗日方程建立AT换挡过程的动力学方程,推导换挡过程的前馈扭矩计算方法,构建AT的转速线图,以此为基础制订换挡控制策略。通过硬件在环仿真测试验证推导动力学方程的正确性,结果显示,制订的控制策略能够控制涡轮转速的变化过程,并得到良好的换挡品质,对AT控制器的自主开发具有重要的指导作用。
AT;拉格朗日方程;动力学方程;换挡过程控制;转速线图
自动变速器(Automatic Transmission, AT)起步平顺、驾驶性良好,被广泛应用于中高级乘用车,但AT自动变速器结构复杂、控制执行元件多、动力传递路径多样,采用传统牛顿力学方法分析困难,本文以拉格朗日动力学方程为基础[1],推导换挡过程的动力学方程,并以此为基础对AT换挡控制过程进行深入研究。
1 AT硬件结构简介
本文以ZF9AT变速器为研究对象[2],该9AT变速器含有4个行星排和6个执行器,其中4个摩擦离合器、2个犬齿离合器可组合出9个前进挡、1个倒挡,结构简图如图1所示。
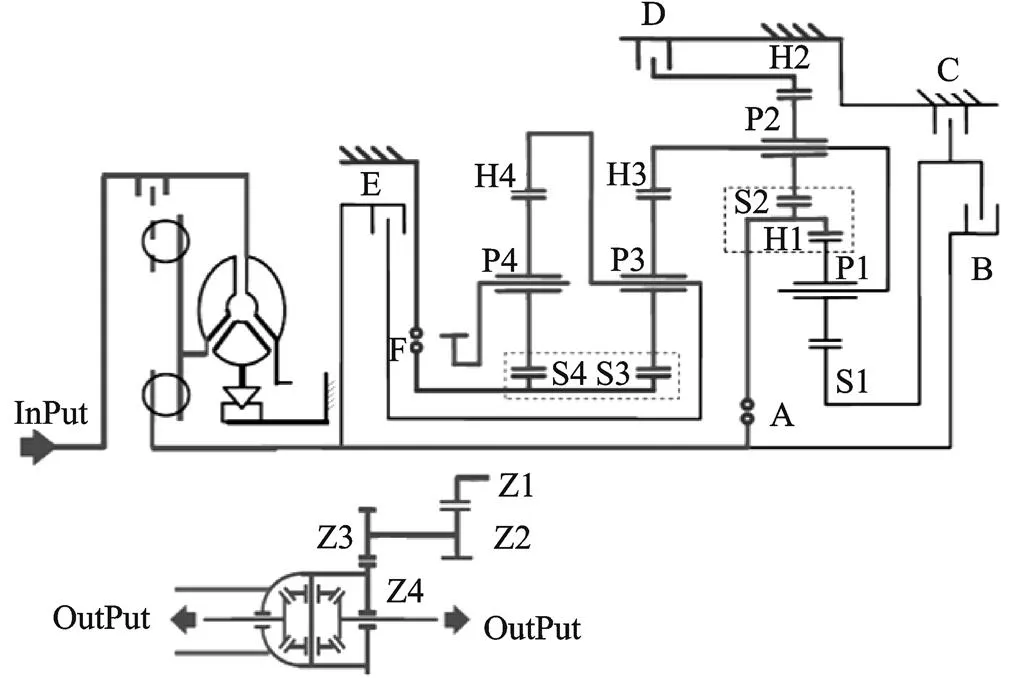
图1 9AT结构简图
其挡位组合逻辑如图2所示,其中第一行A、B、C、D、E、F分别对应六个控制离合器,左侧第一列为对应的挡位,每个挡位需要结合3个离合器。

图2 各挡位的元件组合逻辑
2 AT转速线图简介
为方便计算各构件的转速和各挡位速比,根据9AT的结构简图及各行星排齿比,可画出各挡位的转速线图,其中1挡转速线图如图3所示。

S-太阳轮;R-齿圈;PC-行星架;S1-行星排1的太阳轮、K1-K4为各行星排的齿比,即齿圈与太阳轮的齿数比。
1挡啮合元件为ADF,行星排1/2和行星排3/4各构件的比例关系可根据行星排转速的基础公式计算得到,即
S+R-(+1)PC=0 (1)
行星排1/2与3/4通过PC1-PC2-R3的机械连接建立关联,1/2和3/4构件并不成固定比例,因此,需要分开画转速线图,同时固定涡轮转速,将各挡位转速线绘制在一起就构成了9AT的转速线图,如图4所示。
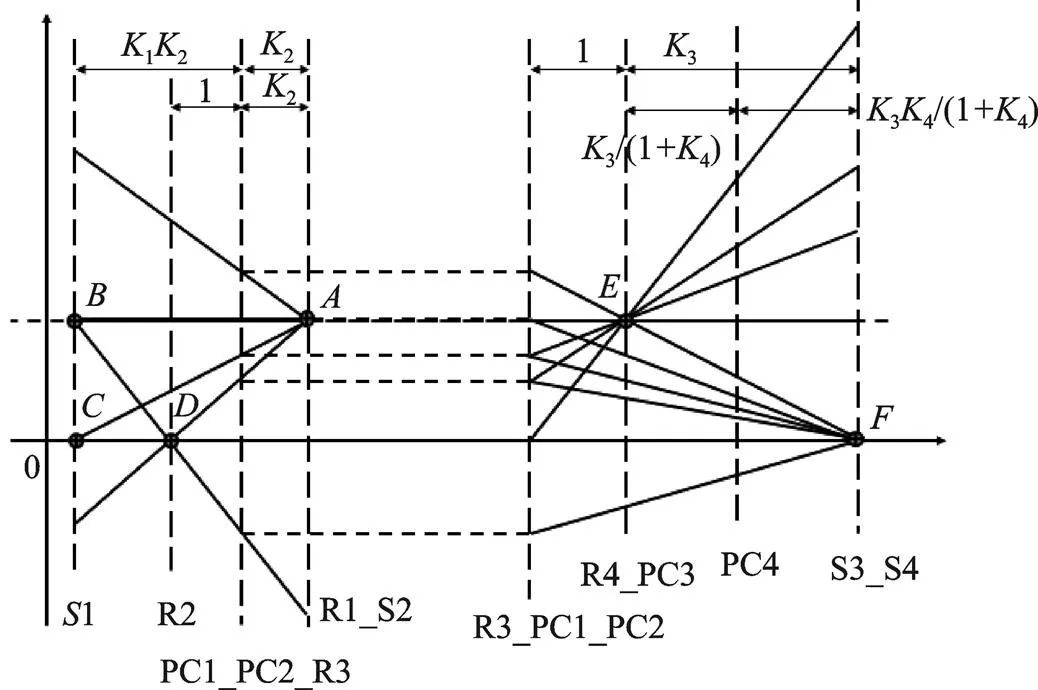
图4 各挡转速线图
9AT有两个转速传感器,分别为涡轮转速e和输出轴(行星排4的行星架)转速o,由图4可知,在两个元件啮合的情况下,可根据涡轮和输出轴转速,计算出其他各构件的转速。
3 AT换挡过程动力学方程
使用第二类拉格朗日动力学方程[4]可忽略各构件间的内力,简化分析过程为
9AT的机械结构为4自由度,即需结合3个元件才能形成固定挡位,换挡过程中有两个元件处于啮合状态,两个元件处于滑摩状态,其为2自由度结构,以1挡升2挡为例,A、F为常啮合元件;C、D为滑摩控制元件,忽略换挡过程各构件的势能变化和打开状态离合器拖拽扭矩的影响以及各种内部摩擦,只考虑动能变化,因此,只需计算换挡过程总动能变化和非有势力的做功,即

选广义坐标为涡轮转角e和行星排输出轴转角o,广义非有势力为涡轮输入到行星排的扭矩in、制动器C的扭矩c、制动器 D的扭矩d、行星排输出轴负载扭矩L。
A、F啮合、各行星排构件的转速与涡轮输入转角e和行星排输出轴转角o的关系式为
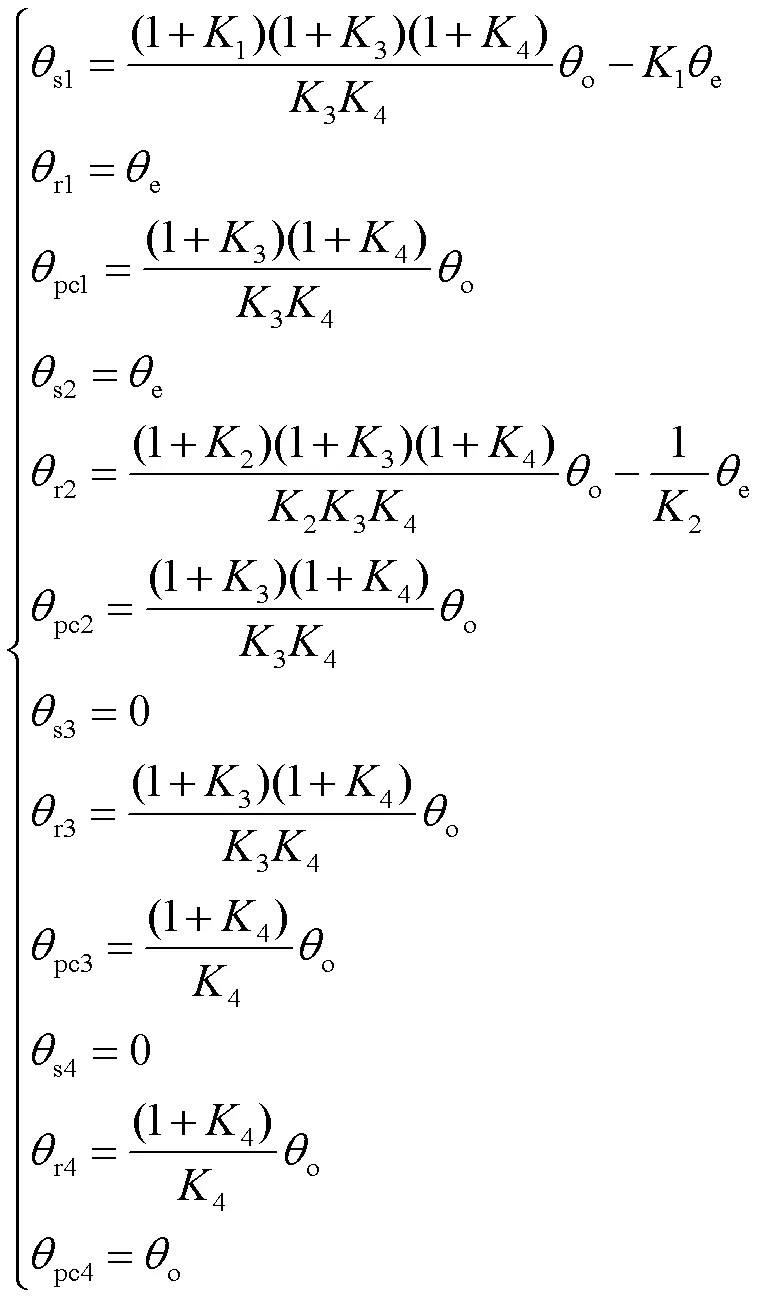
式中,s1为行星排1太阳轮的转角;r1为行星排1齿圈的转角;pc1为行星排1行星架的转角,其他变量以此类推。
令
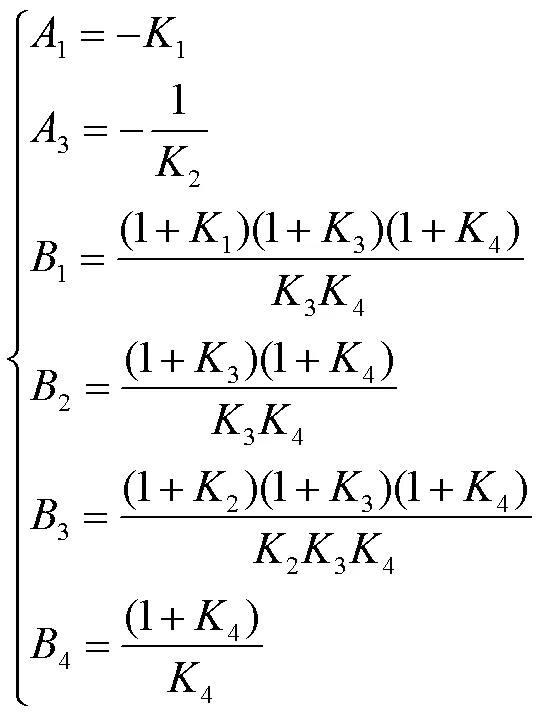
则有:

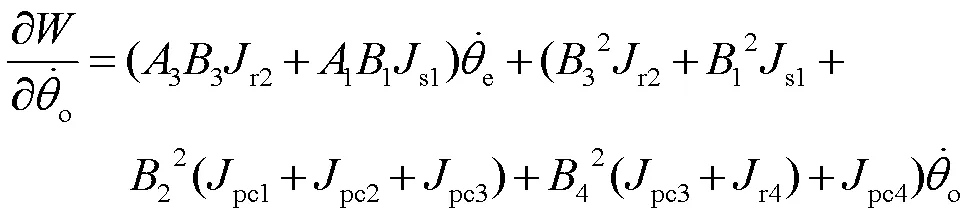

虚工表达式为
令

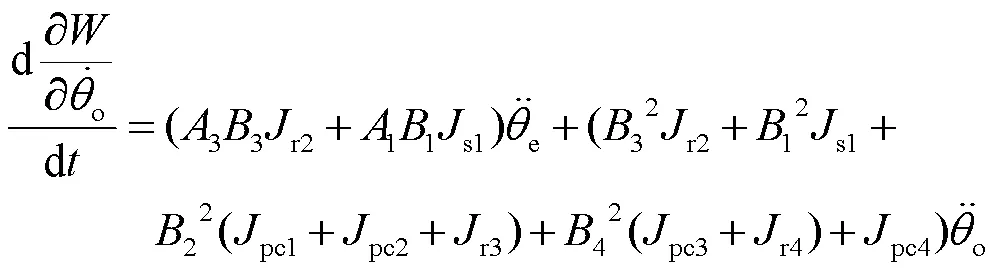
由此可得


式中,e为变矩器涡轮端的转动惯量,即涡轮及其固联零件的惯量,若变矩器呈闭锁或微滑摩状态,则还包括发动机及与泵轮固定连接的变矩器部件惯量,其他惯量为行星排各构件惯量。
在换挡过程中,一般需要控制涡轮转速,因此,将稍作变化,令

可得

式(15)中的输出轴加速度可通过传感器实时计算得到,同时输出轴转速与整车固联,换挡过程变化较小,系数也较小,因此,一般可忽略,得

式中,p为实际行星排中与涡轮转速相关部件转化到涡轮端的转动惯量;13为离合器C、D的扭矩分配系数;in为实际发动机与变矩器组合成新的动力源后输入到行星排的扭矩,可根据变矩器特性和发动机的实时扭矩得到,涡轮加速度与输入扭矩和换挡控制的摩擦离合器C、D扭矩相关,因此,换挡过程的涡轮转速可通过两个摩擦离合器和输入扭矩实时控制得到,这个动力学方程即为换挡过程离合器控制的基础。
4 AT换挡过程动力学方程
在发动机与变矩器[3]组合成新动力源后,需要实时计算其输出,以供后续控制作为前馈扭矩使用,涡轮输出扭矩简图如图5所示。

Te-发动机飞轮端扭矩;ωe-发动机转速;ωt-涡轮转速;Je-包含发动机转动惯量+变矩器与发动机一起固定连接部分的转动惯量;Tp-变矩器泵轮的液力扭矩;K-变矩器变矩比;C-变矩器容量系数;i-变矩器的转速比;Tc-变矩器闭锁离合器传递的扭矩;Tin-变矩器涡轮的输出扭矩;Jt-变矩器涡轮与变速箱输入轴固定连接部分的转动惯量+行星排转换到涡轮端的惯量;Tch-行星排换挡过程控制离合器到涡轮端的负载扭矩。

根据式(17)可知,in的最终表达式可为两种形式,一是基于泵轮扭矩[6]p,二是基于闭锁离合器扭矩c。
基于p,即以p为准,消去c可得

基于c,即以c为准,消去p可得

式(36)中,当接近1(速差较小)或c为0时(闭锁离合器打开)可得

工程开发过程中,因没有实际压力传感器,对闭锁离合器实际扭矩c的估算不精确,p计算也依赖于容量系数的精度,一般通过稳态试验获取,因此,两者精度都不高。考虑到实际换挡过程闭锁离合器要么是打开状态,要么是滑摩状态(小速差),两个状态的过渡时间极短,因此,可直接计算前馈扭矩。一般为通过实验获得的不同泵轮转速、不同液压油温度,根据不同转速比的一组系数表来确定实时。
5 AT踩油门降挡控制过程
以踩油门2挡降1挡为例说明AT的换挡控制过程。PD21控制过程(如图6所示)包括,常啮合元件为A、F,C离合器逐渐打开为offgoing离合器,D离合器逐渐结合为oncoming离合器,令
则

式(22)实际上是将AT的换挡过程转换成双离合器自动变速器(Dual Clutch Transmission, DCT)的换挡控制过程。

图6 PD21控制过程
onc轴转速为通过输出轴转速乘以一挡速比,offg轴转速为输出轴转速乘以二挡速比。
PD控制过程为先调速[5]再进行扭矩交互,在调速阶段通过offg离合器减去目标惯性扭矩,使涡轮转速按预定的目标轨迹向onc轴过渡,目标惯性扭矩根据目标Prof的加速度乘以惯量计算。
当涡轮转速与onc轴转速接近时,要通过控制使涡轮的加速度下降到onc轴加速度,这时有两种选择可使涡轮加速度下降,一是增加offg扭矩,二是使用对发动机的降扭请求,增加offg离合器为理想策略,不影响驾驶性,一般DCT都会使用这种策略,其缺点为offg离合器会产生大量滑摩功,需要有大量的冷却油流量,才不会出现离合器过热,AT离合器最大滑摩功率与冷却流量均较低,因此,要根据实际情况确定offg的调节强度。使用发动机降扭请求可减少滑摩功,但会影响动力输出,两者需做好平衡。
通过offg的调速控制,速差逐渐消除后,进入扭矩交互阶段,onc扭矩这时可迅速增加直到完全锁止onc离合器,因这时onc离合器已经进入完全结合状态,其传扭与压力不成比例,通过处于滑摩状态的offg离合器的向下Ramp速度控制扭矩交互的速度,速比级差越大,交互速度要越慢,以防止车辆出现过大的加速度变化(如图7所示),待offg完全打开后,换挡过程结束。
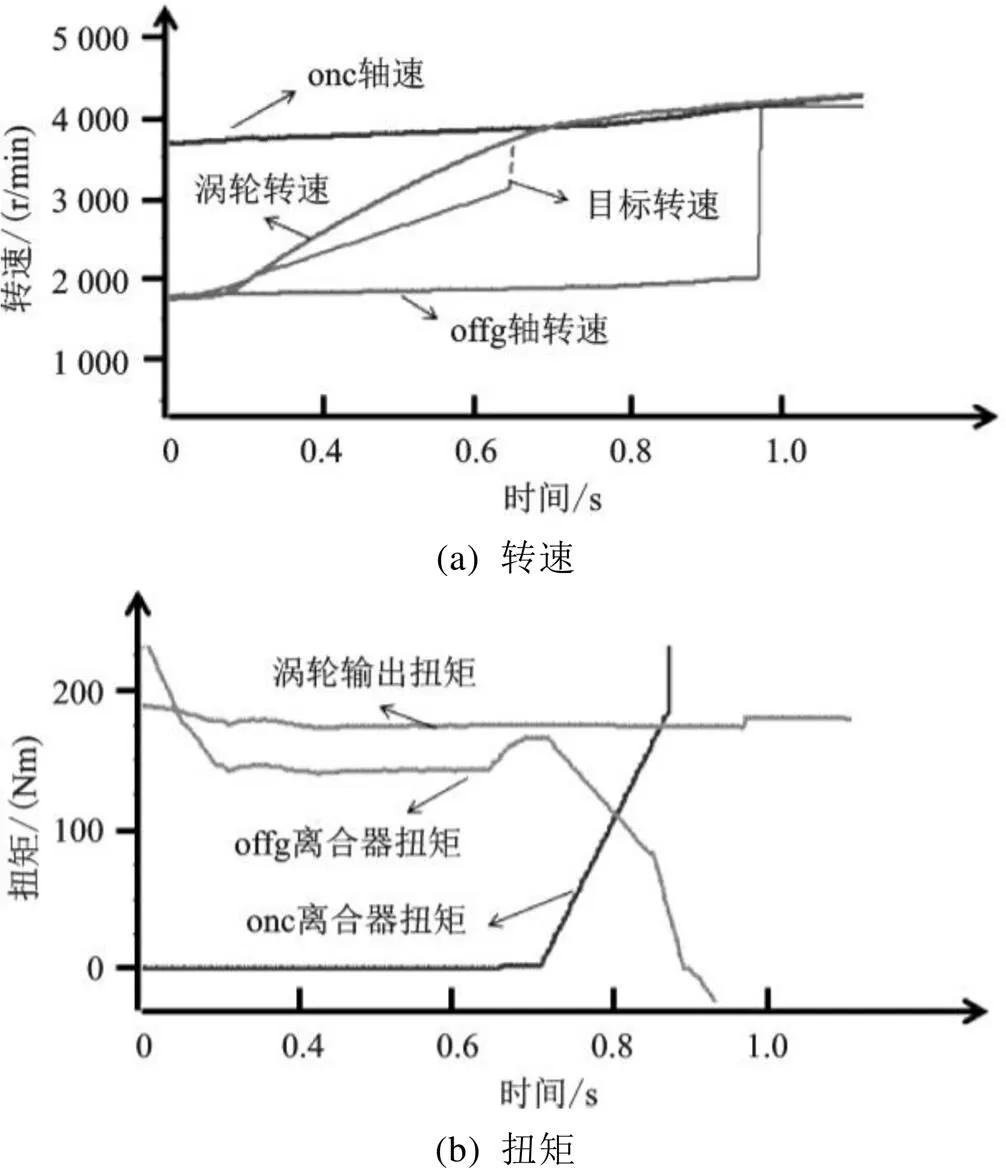
图7 硬件在环仿真台架测试转速数据
硬件在环仿真试验表明,应用本文原理设计的换挡控制器,精确完成了9AT PD的换挡控制过程,验证了理论计算及其控制策略的正确性。
6 总结
基于拉格朗日方程推导AT换挡过程的动力学公式,同时绘制AT的转速线图,计算换挡过程的前馈扭矩,基于动力学方程制订PD换挡过程的控制逻辑,形成了从理论计算到实际控制的完整流程,对实现AT变速器控制的自主开发具有良好的指导意义。
[1] 徐向阳.自动变速器电控系统及其应用软件开发技术[M].北京:机械工业出版社,2018.
[2] GAERTNER L,EBENHOCH M.The ZF Automatic Transmission 9HP48 Transmission System,Design and Mechanical Parts[J].SAE International,2013-01- 1276.
[3] 朱经昌,魏宸官,郑慕侨,等.车辆液力传动[M].北京:国防工业出版社,1980.
[4] 哈尔滨工业大学理论力学教研室.理论力学[M].2版.北京:高等教育出版社,2016.
[5] 冯巍.湿式双离合器式自动变速器起步与换挡控制研究[D].长春:吉林大学,2010.
[6] ROBINETTE D.A Two Degree of Freedom,Lumped Inertia Model for Automatic Transmission Clutch-to- Clutch Shift Dynamics[J].SAE International,2014- 01-1782.
Automatic Transmission Shift Process Control Based on the Lagrange Equation
FENG Wei
( Technical Center, SAIC Motor Group Company Limited, Shanghai 201804, China )
In order to study the control method of automatic transmission(AT) shift process, this paper takes ZF9AT transmission as the research object, establishes the dynamic equation of AT shift process based on the lagrange equation, deduces the feedforward torque calculation method of shift process, the speed line diagram of component AT, and based on this,develop a gear shift control strategy.Through the hardware in the loop simulation test, the correctness of dynamic equation is verified, and result displays the developed control strategy can control the change of turbine speed and obtain good shift quality, which has a good guiding for the independent development of AT controller.
AT;Lagrange equation;Dynamics equation;Shift process control;Speed line diagram
U463.212
A
1671-7988(2023)12-127-05
冯巍(1981-),男,工程师,研究方向为自动变速器控制,E-mail:fengwei649@163.com。
10.16638/j.cnki.1671-7988.2023.012.024
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
汽车零部件(2016年10期)2016-12-06 07:22:34
工业设计(2016年11期)2016-04-16 02:48:32
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
汽车维修与保养(2015年12期)2015-04-18 07:51:44
客车技术与研究(2014年5期)2014-02-28 08:48:29
传动技术(2014年1期)2014-02-27 07:00:58
山东农机化(2011年2期)2011-08-15 00:42:53