半主动导引头倒置接收机建模仿真研究
2023-07-04 01:21刘钊吴大祥赵文龙李苏杭吕志新
系统仿真技术 2023年1期
刘钊,吴大祥,赵文龙,李苏杭,吕志新
(上海机电工程研究所,上海 201109)
导弹制导控制系统设计是防空导弹武器系统的关键技术之一。相关的仿真技术研究非常普遍,国内外开展的制导系统建模仿真均已应用于系统设计中。
防空导弹制导控制系统是一个由多模块组成的复杂闭环系统,是由导引头、自动驾驶仪、指令形成、导弹动力学和运动学模型构成的制导控制回路[1]。制导控制系统数学模型组成如图1所示。
图1 制导控制系统数学模型组成图Fig.1 The mathematical model composition of guidance and control system
目前在制导控制系统数字仿真模型中,导引头模型尚不完善。具体体现在导引头接收机模型通常用比例系数K来代替。在超低空和群目标条件下,导引头雷达误差受到干扰,K值无法反映实际工况,降低了数字仿真模型的置信度。
图2-3 分别为某型号雷达误差(已折算成视线角速度)靶试遥测值与控制系统仿真值的对比曲线,从图中可以看出,两者存在差别。在超低空条件下,差别更明显,数字仿真已不能真实地反映射频环境下导引头的工作状态,也不能满足理论分析和工程实践的需求。为此,本文主要对半主动雷达导引头接收机进行系统级数字仿真建模研究,以提高数字仿真置信度,降低研制成本,使数字仿真在型号研制中发挥更加重要的作用。
1 接收机数学模型
接收机主要完成对目标多普勒频率的跟踪和目标误差角的测量[2],所以选择对归一化比幅单脉冲测角有影响的部件进行建模。经过分析,将半主动导引头回波接收机[3]简化为如图4所示。
图4 回波接收机模型Fig.4 Echo receiver model
1.1 混频器与第一组晶体滤波器模型
三路信号分别与固态本振(SSLO)混频后,输出三路一中频信号。∑为和信号,ΔG为俯仰差信号,ΔH为偏航差信号。
式(1)中,ω1i=2π(fL−f0−fidt);ϕi为第i个信号初相;fL为本振频率;f0为照射信号频率;fidt为第i个目标回波信号多普勒频率;Ui1为第i个目标和信号幅度;Ui2为第i个目标俯仰差信号幅度;Ui3为第i个目标偏航差信号幅度。
再经过晶体滤波器,此滤波器的中心频率为导引头一中频率,滤波器是一个线性系统,对于固定频率信号,可以不考虑其暂态响应而考虑稳态响应,滤波器的幅频响应函数为
晶体滤波器的输出为
上式中,dfi1=fL−f0−fidt−fΙ;fΙ为导引头第一中频频率。
这组模型完成了对回波信号的降频和滤波,滤除了通带范围之外的各种杂散,如图5所示。
图5 混频器与第一组晶体滤波器模型Fig.5 The model of mixer and the first group of crystal filters
1.2 差通道信号抑载调制与三通道合一信号模型
俯仰和偏航两路差信号,与fm正交抑载调制后,与和信号相加,形成三路合一信号UΣ。
式(8)中,Ω为差通道调制角频率;kmE、kmA分别为俯仰、偏航调制系数[4]。
1.3 AGC回路模型
导引头测角采用单脉冲比幅体制,使和信号对差信号进行归一化处理,图6 给出AGC 回路仿真框图。三路合一信号UΣ经过二次混频后将信号频率降至第二中频进行放大。用窄带滤波器滤除UΣ中的Ω边带调制信号,通过包络检波检出和信号幅度,经过低通滤波器后,产生4 级中频放大器AGC 电压,使和信号维持在一个稳定值附近[5],模型中稳定值取1 V。由于AGC电路存在非线性,用模型难以描述,因此采用图6功能建模方式,通过调整框图中的迭代参数,使AGC回路通频带大于60 Hz。
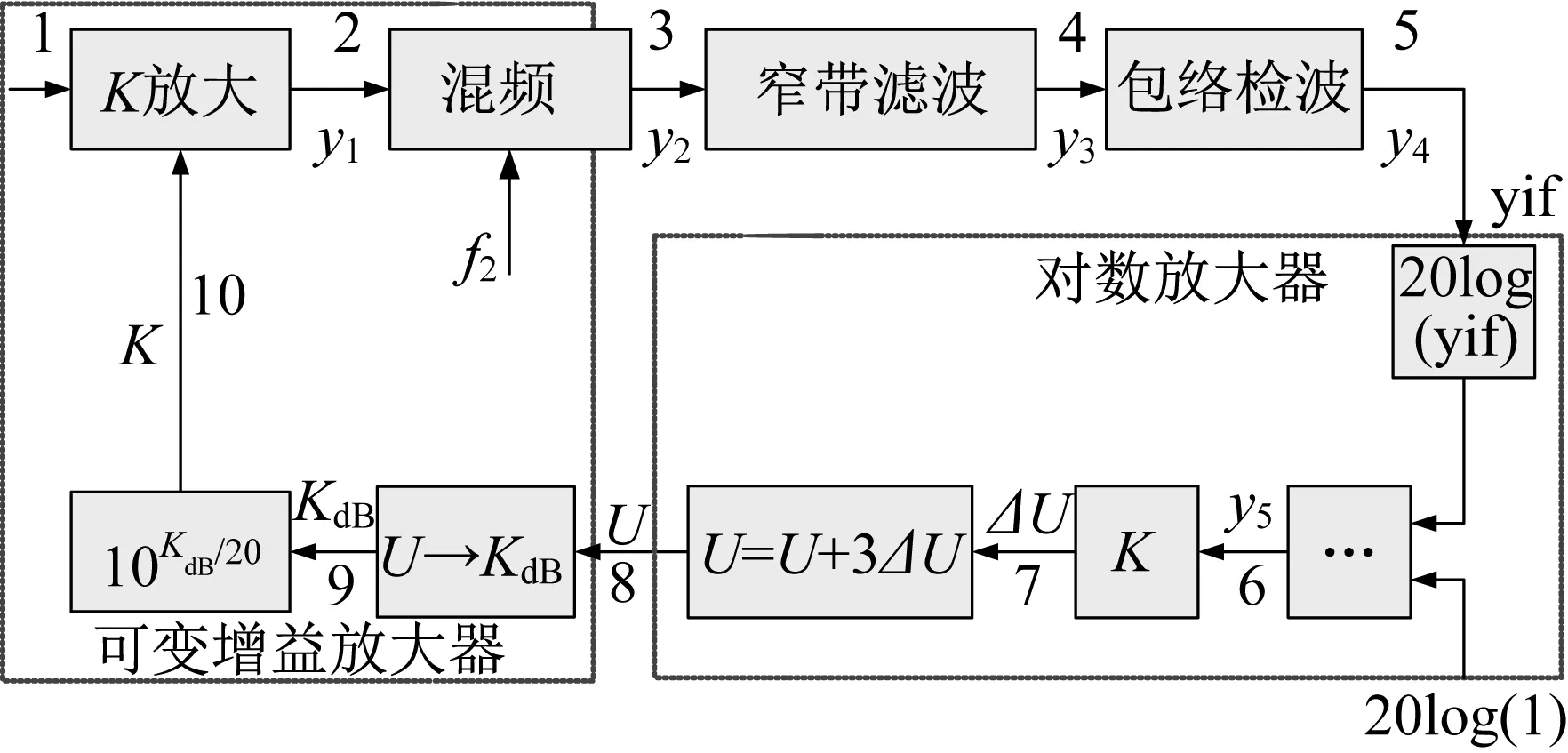
图6 AGC回路模型Fig.6 AGC loop model
(1)图6中1点的输入信号为式(8)。
经过AGC放大后,图6中2点信号为
(2)图6 中2 点信号经过与二本振频率f2混频后得到二中频信号,混频后的输出信号为
式(10)中,ω2i=2π(f2−fL+f0+fidt),f2为第二混频器的本振频率。
(3)图6 中3 点信号经过窄带滤波后,滤除边带调制信号,对于和信号,设滤波器无插损和相移,则
(4)图6中4点信号经过包络检波后的输出信号为
式(12)中,Δωi=ω2i−ω∐,ω∐为导引头第二中频角频率(某种意义上,检波等同于混频)。
(5)将图6中5点信号转化为dB数,并与门限相比较,输出信号为
这里设置N=1,可以使经过放大后的输出电压稳定在1 V附近。
(6)KA为比例因子,值为0.02 V/dB,输出信号为
(7)U为AGC控制电压,输出信号为
式(15)中,KU=3,此时通带在65 Hz 左右。经过测试发现,改变比例系数KU可以控制整个AGC 环路的通带特性,KU取值越大通带越宽。
(8)AGC 控制电压U与AGC 增益KdB关系如图7所示。输入信号范围为-160 dBw~-60 dBw。
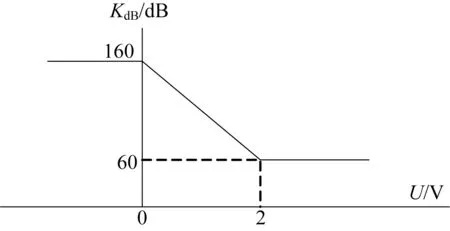
图7 AGC控制特性曲线Fig.7 The characteristic curve of AGC control
若使信号幅度输出稳定在1 V,则增益范围从60~160 dB,控制电压为0~2 V,则控制函数关系为
(9)将KdB转化为十进制数K,则
1.4 速度跟踪环路模型
速度跟踪环路是通过鉴频支路来完成的。由于速度跟踪环路中也存在1 kHz 带宽的同步滤波器,所以只有和支路信号通过。其框图如图8所示。
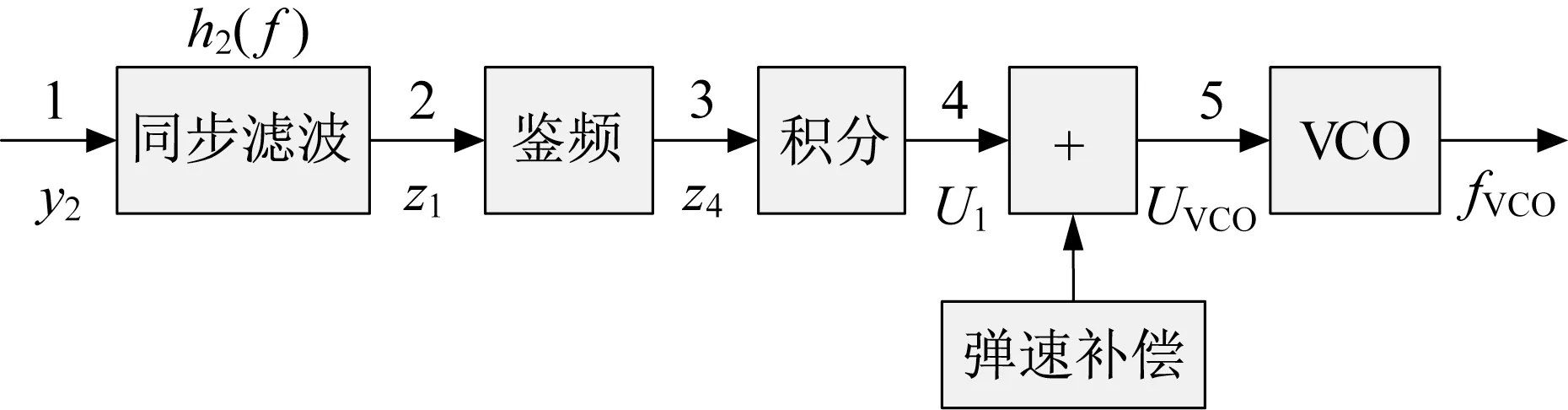
图8 速度跟踪环路模型Fig.8 Speed tracking loop model
(1)同步滤波输入为三路合一二中信号y2,同步滤波器采用与一中晶体滤波器相同方式模拟,其中心频率为导引头第二中频频率,为了方便,h2(df)特性与h1(df)相同,由于同步滤波器滤除y2中的调制边带信号,其输出2点信号为
式(18)中,dfi2=f2−fL+f0+fidt−f∐。
(2)鉴频器模型可以细化如图9所示。
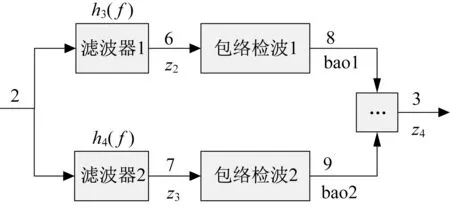
图9 鉴频器模型Fig.9 Frequency discriminator model
h3(f),h4(f)是鉴频器组成中的2 个失谐滤波器,其特征及表示函数为
上式中,f3dB=1.2 kHz。
滤波器1的输出为
滤波器2的输出为
经过包络检波1的输出为
经过包络检波2的输出为
上式中,Δωi=ω2i−ω∐。
3点信号的输出为[6]
Kjb2为检波系数,取值为0.6。
(3)4 点信号是3 点信号的积分,积分时常数为11.3秒,其系统响应函数为
对z4积分后得电压U1。
(4)对VCO 电压补偿一个弹速补偿电压U2,则5点信号为
(5)经过VCO输出的频率为
式(28)中,KVCO=50000 Hz/V,fVCO0=fidt+fΙ。
1.5 角误差形成支路
角误差形成支路由双向检波和同步谐振检波组成,如图10所示。

图10 角误差形成支路Fig.10 Angular error formation branches
(1)双向检波的输入为和差信号经过AGC 放大后的三合一信号,双向检波输入为
双向检波将其包络检出,2点信号为
(2)由于同步谐振检波只检出Ω频率分量,3 点输出与Ω频率有关的幅度分量[7]。
俯仰雷达误差即cosΩt的幅度为
偏航雷达误差即sinΩt的幅度为
1.6 直波锁相环路模型
对于直波锁相环路可以简化为图11,直波信号与本振SSLO 混频到一中频范围内,经过放大后再与VCO信号进行相位比较,得到误差频率,使SSLO不断进行调整直到环路趋于平衡,由于锁相环路的时间常数为μs 量级,远小于仿真步长,故锁相环路简化为将VCO和直波一中的频率变化搬移到SSLO,即

图11 直波锁相环路模型Fig.11 The model of direct wave phase-locked loop
2 仿真与试验验证
Matlab/Simulink软件因具有强大的数值计算和图形功能,编程效率高,可读性、可移植性强,接口兼容性好等诸多优点,广泛应用于自动控制系统设计和仿真中[8]。
本文在Simulink 平台上,根据接收机各组件及信号流的数学模型建立各仿真模块,然后组成接收机数字仿真模型,如图12所示。
图12 接收机数字仿真模型Fig.12 The digital simulation model of receiver
图13 回波多普勒频率信号Fig.13 Echo doppler frequency signal
以目标速度230 m/s、飞行高度80 m、航路捷径665 m、发射斜距6.55 km 为例,目标雷达散射截面采用长空无人机模型,将导引头接收机模型嵌入到制导控制系统数字仿真模型进行仿真,结果如图13-15所示。
由图13-15 可以看出加入接收机模型后,制导控制系统输出的雷达误差信号更加接近飞行试验的遥测数据,可以比较真实地反映镜像目标的影响。图14 显示,在1.65~2.12 s、2.55~2.90 s、3.00~3.24 s、3.63~3.83 s、3.95~4.27 s、4.61~4.96 s 和5.48~6.27 s 时间段出现明显镜像干扰,在图15 相应的时间段可以看出镜像目标信号对真实目标天线雷达误差信号的影响,其特征与飞行试验结果吻合。由此可见,加入接收机模型对整个制导控制系统的仿真置信度有很大的提高,仿真结果与实际飞行情况更加接近。
图14 高低天线雷达误差和镜像干扰报警指示Fig.14 Vertical antenna radar error and mirror interfer‐ence alarm indication
图15 俯仰/偏航通道天线雷达误差电压信号Fig.15 Pitch and yaw antenna radar error voltage signal
3 结语
导引头接收机数字仿真模型的建立完善了制导控制系统的数学模型,达到了预定的目标。今后可以在制导控制系统数字仿真中,在半实物仿真之前就及时发现问题,避免不必要的资源浪费。对于接收机模型还需要进一步完善,应充分考虑非线性环节的作用,在条件成熟时加入接收机截获模型。
目前国内有关接收机模型的建模不是很完善,此次对接收机建模尽管局限于功能性建模,但是对整个控制系统数学模型的仿真置信度有很大提高,可以更好地服务于型号研制工作。
猜你喜欢
电子技术应用(2021年12期)2021-12-22
铁道通信信号(2018年2期)2018-04-18
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
太空探索(2014年1期)2014-07-10