
浅析海洋油气平台安全巡检机器人应用
2023-07-02 00:20陈土顺冯猛张林陈超核谭纶
广东造船 2023年2期
陈土顺 冯猛 张林 陈超核 谭纶


摘 要:随着产业智能化升级,近年来海上油气平台信息化与无人化建设不断推进,机器人在海上油气田开发中的应用越来越受到重视。目前海洋机器人主要应用于水下智能探测作业,但在海上油气平台的应用还处于起步和探索阶段。本文对海洋油气平台安全巡检机器人的现状进行了分析,并对海上平台安全巡检机器人的基本功能要求以及主要适用场景进行论述。最后展望了巡检机器人在海洋油气平台安全检测领域的应用前景。
关键词:机器人;巡检;海洋油气平台;平台安全
中图分类号:TE58 文献标识码:A
Research on the Application of Safety Inspection Robot for
Offshore Oil and Gas Platform
Chen Tushun1, Feng Meng1, Zhang Lin2, Chen Chaohe3, Tan Lun3
( 1.CNOOC Safety & Technology Services Co., Ltd., Zhanjianag 524057; 2.CNOOC (Guangdong) Safety & Health Technology Co., Ltd.,
Zhanjiang 524057; 3.College of Civil Engineering and Transportation, South China University of Technology, Guangzhou 510641 )
Abstract: With the upgrading of industrial intelligence, the informatization and unmanned construction of offshore oil and gas platforms have been promoted in recent years, and the application of robots in offshore oil and gas development has attracted more and more attention.At present, ocean robots are mainly used for underwater intelligent detection and operations, but their application on offshore oil and gas platforms is still in the initial and exploratory stage. In this paper, the research status of offshore oil and gas platform safety inspection robot is analyzed, and the basic functional requirements and main application scenarios of offshore inspection robot are discussed. Finally, the application prospect of inspection robot in offshore oil and gas platform safety inspection is prospected.
Key words: Robot; Inspection; Offshore oil and gas platform; Platform security
1 前言
目前智能安全巡檢机器人在海上油气平台的应用还处于起步和探索阶段,因此有必要对海洋油气平台安全巡检机器人应用进行深入研究分析,挖掘安全巡检机器人的应用场景和功能需求,从而为海洋油气平台无人化安全巡检进行技术积累。
近年来,我国开展了一系列的陆地设施安全、消防等方面的巡检机器人的研究,但对海上油气设施的安全巡检机器人没有引起足够的重视。为此,本文对海上油气设施的安全巡检机器人的应用前景、应用现状、应用场景、功能要求以及结构形式展开研究分析,有助于实现海上油气设施的安全巡检机器人的应用。
2 安全巡检机器人研究及应用现状
决定海上平台安全巡检机器人应用前景的关键,在于它所具备的功能能否契合平台的实际需求、改善运营成本、替代部分人力、工作效率高等[1]。在海洋石油生产平台领域,自动化智能装备多在海底管线铺设或在钻完井等阶段得到运用,其他方面的运用还有待提高。伴随着数字化油田建设,各上游公司也越来越重视大数据在生产过程中所起的作用,机器人因其在危险且恶劣环境执行任务的能力、超强的数据存储和处理能力、远程大容量通信能力、结合云平台的能力,结合其他无人系统(如水下、空中无人系统)组网的能力更加放大了平台巡检机器人相较人工的优势,未来也是提升油气田生产效率的重要途径。此外,海洋油气企业近年来在大力推进无人平台建设,利用在线监测与机器人巡检代替人工巡检,未来将有越来越多的安全巡检机器人在平台上应用,机器人巡检也将是未来平台巡检的重要手段。
目前国内外已经投入应用的海上油气巡检机器人主要有四种:轮式机器人、轨道式机器人、履带式机器人以及四足机器人。这四种机器人的主要区别在于移动方式,但该区别却影响着核心功能的发挥。
2. 1 轮式机器人
轮式机器人采用四轮驱动的移动方式,适用于平面且宽敞的空间检查[2]。其主要优点:(1)移动速度快;(2)原理简单;(3)维修方便。主要缺点:(1)通过能力差;(2)转弯半径大;(3)容易打滑;(4)自稳性差、重心高;(5)无法搭载较高的云台及机械臂等,检测范围小;(6)轮子容易被障碍物卡死;(7)故障率高;(8)倾倒后难以恢复;(9)无法执行爬梯等复杂运动;(10)需要为其设置特殊的通道。
轮式巡检机器人多用于陆地变电站、工厂等場所[2]。作为第一代自行移动式巡检机器人,2014年首次被部署在壳牌北海油田。2012年,加拿大开发了一款基于人工远程遥控的四轮式巡检机器人,该机器人所搭载红外摄像头可在智能算法的控制下对钻井平台室内变电站进行巡检。
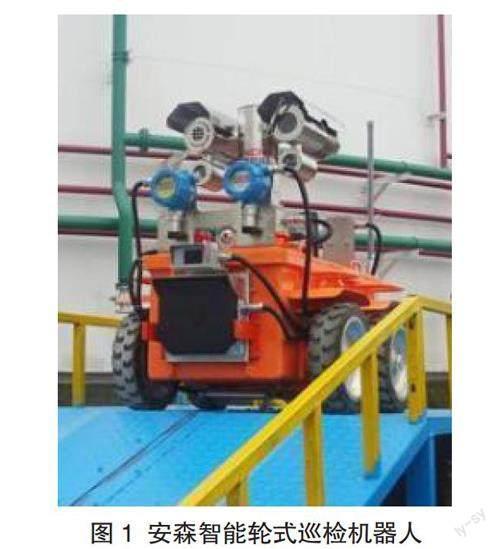
安森智能是一家致力于解决国内油气田安全巡检问题的高新企业,其研发的轮式安全巡检机器人(见图1),搭载AGV导航技术,搭配激光遥测、红外热成像、声波探测、可见光分析等核心模块,可自动识别现场设备环境准确信息,并生成巡检数据报告进行回传。
2. 2 轨道机器人
轨道机器人是一种悬挂在特殊轨道上,来回穿梭往复式的仪表和环境监视设备,主要用于室内环境[3]。其主要优点:(1)巡检速度快;(2)故障率低;(3)原理简单。主要缺点有:(1)对环境敏感,适合室内;(2)需要安装特殊轨道;(3)检测范围小,只能检查宽阔区域;(4)功能单一;(5)占用大量通道空间。
2020年金涛[4]针对海上石油平台电气开关间巡检任务量大、平台配备专业人员少的问题,利用轨道式机器人对海上平台开关间进行巡检应用研究,取得一定成果。该机器人可挂载各种传感器,可对电气间各类数据进行智能化分析,并将数据实时传输至后台。2020年王朝卿[5]等设计了一款海洋石油无人井口平台轨道式巡检机器人(见图2),该机器人具备红外双视融合等技术,可对平台开关柜进行监测,并形成图像发送至后台。2021年宋维廷等[6]针对海洋平台电气间巡检问题进行开发设计,以轨道式巡检机器人为技术依托,结合电力载波+交换机方式完成机器人与中控室的信号传输。
2. 3 四足机器人
它是采用四足移动的一种仿生机器人,是众多机器人公司和应用商竞相研发的技术前沿[7]。由于其对复杂空间环境的适应性好,具有广阔的应用前景,但目前尚处于起步阶段。其主要优点:通过能力佳,空间适应性强。主要缺点:移动速度慢;技术尚不成熟;负载能力有限;设计原理复杂。
2020年2月,AKER BP公司同波士顿动力公司合作,在北海平台上部署了四足巡检机器狗(见图3)对平台装置进行多种检测,为陆上操作中心提供海上设施的全景呈现,并可在紧急情况下协助人员撤离。
2. 4 履带式机器人
它是针对复杂工作环境场景、负载要求、稳性要求而设计的一种机器人,采用单段履带、多段履带式驱动,是国外油气行业普遍采用的一种安全巡检机器人。其主要优点:(1)不易打滑;(2)牵引力大;(3)底盘稳定;(4)转弯半径小;(5)结实耐用;(6)移动速度适中;(7)通过性好;(8)可爬楼梯;(9)云台臂高;(10)可代人轻型作业;(11)倾倒后容易恢复;(12)对空间要求低,移动灵活等。主要缺点:(1)转弯慢;(2)噪音稍大。主要有TechnipFMC、道达尔、挪威国油等,其中以道达尔2018年举办的油气行业巡检机器人大赛最为著名,90%的参赛作品采用履带驱动,充分证明了这种行驶方式的优越性[8]。
海洋油气平台结构复杂、通道狭窄、仪表种类多、密度大、布局不规整、管线错综、空间有限,因此要求智能安全巡检机器人具备良好的通过性、小转弯半径、定点大范围信息采集能力、较强的移动能力、较低的故障率以及能够完全适应海上室外环境要求。
目前轮式机器人在海油平台上得到一些应用,轨道式机器人也在陆上终端配电室得到部署。国内目前暂未有海上履带式巡检机器人的应用案例,但履带式机器人在国外油气运营商的平台上却备受欢迎,其能够充分满足海洋油气平台的特殊工况,代表着特种工业安全巡检领域的主流模式和先进理念。
为了确保履带式安全巡检机器人的稳定运行,前期可以在有人平台上进行短期试验,不断优化功能设置,待较为成熟后可在无人平台上大规模应用。
3 安全巡检机器人的基本功能要求
鉴于海洋油气生产的特殊环境,安全巡检机器人大多需要在危险的环境中工作,并解决工人面临的健康、安全和环境挑战,因此海洋油气平台安全巡检机器人需要具备以下功能:
(1)防爆
油气生产最大的安全隐患是爆炸,特别是海洋油气平台结构紧凑,空间有限,虽然在设计中考虑到通风要求,但仍然有很多区域容易发生易燃易爆气体浓度超标,这些区域对工人是严重的危险隐患,任何操作失误都可能引发火灾、爆炸事故。巡检机器人利用地图信息和传感器信息在平台上自由移动,使用车载摄像头读取气体浓度数据,并结合自身携带的气体探测器,可以有效的对平台所有空间范围的气体浓度情况绘制成图,以便在灾难发生前检测出异常情况。
安全巡检机器人的防爆技术研究,主要集中在防爆电动机、防爆外壳、动力电源三个方面:
① 防爆电机设计,包含结构设计、工艺以及故障诊断。在防爆电机故障诊断方面,李伟鑫等[9]从对外部环境音频进行识别入手,开发出采用音频识别的防爆电动机故障监测系统;
② 防爆外壳设计,近些年来轻薄性及加工的便利性越来越受到重视。安郁熙等[10]通过有限元的方法,分析出结构不同钢材对防爆外壳轻薄化的影响;
③ 动力电源方面,主流供电方式由以下几种电池提供:磷酸铁锂电池;超级电容;磷酸铁锂电池并联超级电容的混合电源。
(2)自动/遥控巡检
平台甲板上划有安全通道,但其路线比较复杂,不易辨别方位;加之机电设备、临时工具、障碍物繁杂,楼梯、舱室、台阶、地面隆起,以及狭小空间、雨雪冰冻天气地面湿滑、火灾烟雾、高温高噪音、悬空作业、台风等导致人员工作受限,这些因素不论对人工还是机器人巡检都带来了挑战,也存在安全风险;相比起人工,机器人集成地图导航和图像识别、避障和路径规划、标记功能,即便工作种类再多也不会出现重复劳动,将空间情况实时记录,反馈给中控,比人工的效率高很多,可确保工人远离危险源。
安全巡检机器人的巡检系统向着模块化、标准化以及高度集成化方向发展,其控制系统智能化和可靠性,对实现安全巡检机器人自动/遥控巡检起着至关重要的作用。如中科院沈陽自动化所设计的安全巡检机器人,具有遥控和局部自主控制两种工作模式。该巡检机器人的遥控由地面远端控制室发出指令完成,采用对机器人进行预编程与传感器定位相结合的方法,机器人可以完成自主越障。
(3)信息收集与分析
海洋油气平台安全巡检机器人,还应具备以下功能:图像音频智能识别、智能读数和记录、高清摄像、热成像、火灾识别自动灭火、气体探测、温度湿度检测、自动充电、故障报警等。
平台上的生产设备众多,很多时候需要通过声音辨识设备的工作状态、机器人集成音频智能识别模块,同时结合振动检测功能,迅速地辨别出设备种类、工作是否正常、结构是否可靠等;集成高清摄像头,可以检查油水泄露、腐蚀、记录整体环境状况;视觉识别便于智能读取记录仪表读数、障碍物识别和规避、自主行动、资产状况监测、记录和评估等;火灾识别、气体、温度湿度探测、热成像等功能,则更能体现出机器人的优势。
图像识别技术,在巡检机器人信息收集与分析过程中起着至关重要的作用。巡检机器人的图像识别任务,可以从两方面开展:利用高清工业摄像机对各类仪表进行识别;利用红外摄像机对高温设备进行温度识别。
指针式仪表在海洋油气平台应用较为广泛,对于指针式仪表的巡检多采用人工巡检的方式,指针式仪表的图像识别存在较大难度,故对指针式仪表盘进行识别的研究较为热门。对于一些高温高压设备,一般采用红外摄像机进行实时监控,除了采用一些传统的图像处理方式边缘检测、特征识别等外,神经网络法的应用也越来越多,它识别复杂的数字和字体更加具有优势,并且具有自适应、自学习的特点。
4 安全巡检机器人主要适用场景
对于安全巡检机器人适用场景,调研了多座油气平台,并与平台方深入交流和讨论,同时结合海上油气平台的生产运营需求,总结出安全巡检机器人最贴合平台生产运营需求并具有实用性的应用场景:
(1)气体探测
海洋油气平台采用巡检机器人携带红外探测仪可以进行大面积的远程非接触式探测,准确识别管道、容器因腐蚀、破损、堵塞引起的危险气体泄露,获取浓度、扩散信息,定位泄漏点,及时预警,提高安全等级。通过机器人的巡检,可以覆盖固定探头覆盖不到的区域,提高平台的安全性。
气体探测场景的机器人,要具有相关性能指标,探测目标气体一般为:烃类、一氧化碳、硫化氢等有毒有害气体,探测范围在0~100%LEL·m。
(2)台风前后平台整体安全状况
巡检机器人具备极端环境下的稳定行走、平台检测和数据交互功能。巡检机器人可以在台风前人员撤离后,对平台进行整体例行检查,记录仪表数据和各类设备仪器状态;台风过后,再次对平台进行例行检查,寻找危险气体泄露信息等,依据台风前后的例行检查数据和影像资料,可以及时评判台风对平台安全状况的影响,确保安全复工,将复工风险降至最低。
(3)仪表读数
巡检机器人可精确高效获取各类模拟信号仪表和数字显示仪表读数,并结合时间和环境状态对各类数据进行存储、上传和比对;通过可见光成像和红外线成像识别系统,有效的解决人工读取数据效率低、读取环境受限和数据关联性差的问题,提高了各类数据的实时性和环境实时性,并可以直接和数据中心交互,提高数据的应用效率和传递精准度,对于数字化平台和生产管理具有重要意义。
(4)远程视角
为实现陆地数据中心对平台的全方位实时监控,巡检机器人通过高清和红外线光学设备将采集到的视频图像实时回传,便于陆地人员把控平台总体状况;同时巡检机器人具备自主故障识别功能,通过关键特征和检测门限识别异常现象并记录故障位置和状态,实时发送告警信息提示管理员进行确认。在整个巡检监控过程中,巡检机器人将采集到的大量数据通过无线网络发送回陆地,确保巡检过程和结果全面可靠。
巡检机器人的应用环境指标要求:宽温(-40℃~75 ℃)、抗震、防盐雾、防尘防水(IP68)、防爆(Zone-I),采用有源以太网的方式进行供电,并具有环网的网络架构。
(5)作业安全监护
对于突发的无可视或体感的危险源,作业人员无法及时感知。巡检机器人可用作辅助人工作业防护,利用机器人所配备的各类监控传感器,及时准确辨别诸如气体泄漏、温度变化、异响噪声等故障,协助人工作业监护,发现隐患在第一时间警告撤离,降低人员安全风险。
(6)代替人员检查危险空间
海洋油气平台设备众多,平台本身结构复杂,部分空间密闭,容易引起可燃气体、粉尘聚集甚至浓度超标,给正常的作业带来极大的安全隐患。平台安全巡检机器人在人工作业前,进入密闭空间对温度、氧气、二氧化碳以及其他危险气体浓度进行综合分析诊断,评估风险等级,排除隐患,有效保证人员的生命健康。
5 总结
本文对海洋油气平台安全巡检机器人应用进行分析,探讨了海洋油气平台安全巡检机器的功能与可应用的场景,有助于安全巡检机器在海洋油气平台上的推广应用,从而促进海洋油气平台安全巡检机器人的发展。
参考文献
[1]苗俊,尤志鹏,袁齐坤.智能巡检机器人研究现状与发展[J]. 2021
(2019-24).
[2] Lu S,Qian Q, Zhang B, et al. Development of a Mobile Robot for Substation
Equipment Inspection[J]. Dianli Xitong Zidonghua, 2006,30(13):94-98.
[3]秦真,王谦,张宇宁.油田智能巡检机器人及其应用问题与解决方案[J].
电子世界, 2019(15):2.
[4]金涛.智能轨道式巡检机器人在海洋石油平台首次应用研究[J].化工
设计通讯,2020(11):24-36
[5]王朝卿,王毅,丁冬,王晓明,刘茜.智能巡检机器人在海洋石油无人
井口平台的应用[J].石油和化工装备,2020(23).
[6]宋威廷,张家珍,储乐平,吴志星.海洋平台电气间智能巡检系统总
体设计[J].石油和化工装备,2021,24(04).
[7]陈如申,黎勇跃.一种防爆巡检机器人的智能巡检方法:
CN111571598A[P]. 2020(12).
[8]周新刚,戴国华,陈丰波.海上石油平台智能巡检机器人:
CN211405607U[P]. 2020(23).
[9]李伟鑫.基于音频的防爆电机故障检测研究[D].大庆:东北石油大学,
2015.
[10]安郁熙,王程程,崔焕鹏.矿用隔爆型电气设备防爆壳体的轻薄化设
计[J].煤矿机电,2016(1).
猜你喜欢
金桥(2019年10期)2019-08-13
物联网技术(2017年2期)2017-03-15
科学与财富(2016年21期)2017-03-02
中国新通信(2016年23期)2017-03-01
中国高新技术企业(2016年34期)2017-02-10
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
