
一种基于重叠子孔径回波信息的SAR图像配准算法
2023-06-27 04:58叶铮朱岱寅吴迪
航空学报 2023年8期
叶铮,朱岱寅,吴迪
1.南京航空航天大学 电子信息工程学院,南京 210016
2.南京航空航天大学 雷达成像与微波光子学教育部重点实验室,南京 210016
合成孔径雷达(Synthetic Aperture Radar,SAR)图像的应用领域十分广泛,例如目标检测识别、变化检测和数据融合[1]等,SAR 图像配准是这些应用的前期准备技术。SAR 图像配准是指将不同时间、不同视角下对同一场景的成像结果进行对齐的过程,通过寻找参考图像和待配准图像之间的几何变换关系,将它们校正到统一空间坐标系便于后续分析及处理。
SAR 成像的原理是发射相干电磁波,利用信号的相干性来完成目标的成像。在SAR 图像中,每个像素对应一个分辨单元,分辨单元中所有散射点回波的矢量和为该单元接收的回波。由于这些散射点回波相互干涉并且每个散射点回波在幅度和相位上存在差异,矢量相加的结果造成每个分辨单元的幅度和相位各不相同,围绕某一均值呈现起伏,这种起伏导致了SAR 图像中散布大量的乘性相干斑噪声[2]。
传统SAR 图像配准大多直接应用光学遥感领域的配准算法,主要分成基于灰度的配准方法和基于特征的配准方法2 类。基于灰度的配准方法通过度量图像像素点的灰度信息,多次迭代找出图像间相似性最高时的几何变换参数获得配准图像,实现简单但计算量大,易受噪声干扰。基于特征的配准方法利用图像的显著特征如点、线、面等进行特征匹配,降低了算法复杂度[3]。由于基于特征的配准方法对几何差异和同名点灰度值的非线性变换[4]具有很强的鲁棒性,所以目前大多数配准算法是基于局部不变特征[5]。点特征是基于特征的配准方法中最为常用的,尺度不变特征变换(Scale-Invariant Feature Transform, SIFT)算法[6]应用较为广泛,用于检测低噪声条件下光学图像中的特征点,而SAR 图像中大量无序分布的相干斑噪声使具有均匀散射系数的SAR 图像区域不具有均匀灰度,它们在相邻帧SAR 图像中的相关性较差,导致配准过程中易发生特征点的误检和误匹配,配准效果不理想。文献[7]针对乘性相干斑噪声定义了一种新的梯度,即用梯度比代替梯度差分,将该梯度与Harris 准则相结合提出了SAR-Harris 准则提取特征点并构造Ratio 特征描述符,提高算法对相干斑噪声的鲁棒性。文献[8]根据SAR 图像灰度分布的不均匀性采用各向异性扩散方程滤除相干斑噪声,并结合改进局部自相似特征描述算子实现较为精确的配准。各种改进算法大多是从优化特征点的提取以及特征描述算子的构建角度出发的,配准过程中用到的都只是SAR 复图像的幅度信息,忽略了SAR 复图像的相位信息。
针对上述问题,本文提出了一种基于重叠子孔径回波信息的SAR 图像配准算法。首先,对回波进行孔径复用率为50%的多帧成像处理获得SAR 图像序列;然后,根据复图像的相位信息并结合适用于子孔径图像的自聚焦方法获取强相关的重叠子孔径图像;最后,利用多图像配准方法实现成像孔径内和孔径间的子孔径图像配准并将参考图像和配准结果进行非相干叠加得到融合图像。本算法根据重叠子孔径图像之间的相关性,将图像域数据经傅里叶变换返回相位历史域,对得到的相位历史域数据的重叠部分单独成像分别作为参考图像和待配准图像。由相同脉冲成像所得的图像之间的相关性较强,因此能够提取出更多的同名点,从而提升了配准效果。
本文结构安排如下:第1 节简要介绍SAR 成像与图像配准技术,分为SAR 成像、自聚焦处理和图像配准3 个部分;第2 节介绍了基于重叠子孔径回波信息的SAR 图像配准算法的流程,包括基于回波强相关的重叠子孔径图像获取和基于脉内和脉间的子孔径图像配准2 个部分;第3 节是实验与分析,给出了多个不同场景的实测数据处理结果及分析;第4 节对本文进行了总结。
1 SAR 成像与图像配准技术
本节从SAR 成像出发,对一定程度散焦的成像结果进行自聚焦处理补偿相位误差,最后对自聚焦处理后的SAR 图像进行配准的整个流程做简要介绍。
1.1 SAR 成像
现有的机载SAR 成像技术已经突破0.1 m分辨率,经典的SAR 成像算法包括:距离多普勒算法(Range Doppler Algorithm, RDA)、Chirp 变标算法(Chirp Scaling Algorithm, CSA)、后向投影算法(Back Projection Algorithm, BPA)和极坐标格式算法(Polar Format Algorithm, PFA)等。PFA 算法在时域进行相位调整及补偿,能有效补偿雷达平台的非理想轨迹引入的误差,并且简洁高效。因此本文SAR 图像配准中的参考图像和待配准图像是通过PFA 算法对雷达原始回波复数据进行各子孔径互不重叠的多帧成像处理,最终得到一组连续的SAR 图像序列。序列中的每一帧图像都代表载机在不同时刻以不同角度观测目标区域,目标回波是相干的所有散射点回波的矢量和,其幅度和相位随着回波方向变化而变化,因此相干斑噪声在序列图像的不同帧中随机分布,干扰了特征点的正确提取和匹配。
1.2 自聚焦处理
即使PFA 算法进行了运动补偿,但是载机平台运动不稳定、成像算法中的部分近似及电磁波传播误差等仍会产生相位误差导致图像散焦,从而影响SAR 图像配准。为了弥补此不足,机载SAR 在成像后往往还要经过自聚焦处理获取聚焦良好的图像。现有的自聚焦技术主要包括子孔径相关法[9(]Map Drift Algorithm, MDA)和相位梯度自聚焦[10(]Phase Gradient Autofocus, PGA)等。其中,MD 算法只能估计二次相位误差,而PGA 算法可以估计任意阶的相位误差,且具有较好的鲁棒性[11]。因此本文的对比实验通过PGA 算法对成像结果进行处理自动估计并补偿残余的相位误差,得到聚焦良好的SAR 图像。图像质量的提高使图像细节更加清晰,有利于后续图像配准过程中的特征提取,配准性能得到一定程度的提升。
1.3 图像配准
图像配准是将待配准图像几何校正到与参考图像一致的空间坐标系中。当SAR 图像质量较高时,通常采用基于图像灰度的配准方法,其一般流程如下:像素偏移量估计、配准参数估计、图像重采样。当SAR 图像质量一般时,通常采用基于特征的配准方法,其一般流程如下:首先通过SIFT 算法提取出参考图像和待配准图像的特征点并构建特征描述符,然后根据最近邻距离比原则[12]获得初始匹配点对集合,接着利用随机抽样一致(Random Sample Consensus, RANSAC)算法[13]剔除初始匹配点对集合中的误匹配点对,最终根据最优匹配点对集合确定几何变换参数实现图像配准,是一个由粗到精的配准过程。
现有的SAR 图像配准算法针对特征点的提取以及特征描述符的构建进行了大量改进,如PCA-SIFT 算法[14]和SAR-SIFT 算法[7]等,同时对特征点集之间的匹配进行研究,如各种改进的RANSAC 算法和局部线性变换算法[15]等。这些配准算法大多只利用了SAR 复图像的幅度信息,忽略了相位信息,也未充分考虑如何避免SAR 图像中相干斑噪声带来的不良影响。
2 算法介绍
为了克服无序分布的相干斑噪声导致参考图像与待配准图像间相关性较差,配准效果受到影响的弊端,本文按照重叠子孔径的方式对SAR 回波复数据进行多帧成像,利用SAR 复图像的相位信息并结合子孔径自聚焦处理得到相关性较强的参考图像和待配准图像。算法的信号处理流程主要分为子孔径图像的获取和图像配准2 个部分。
2.1 基于回波强相关的重叠子孔径图像获取
子孔径划分示意图如图1 所示。SAR 相干成像不可避免地出现随机分布的相干斑噪声,通常按图1(b)所示的不重叠子孔径划分方式对全孔径回波数据进行划分并单独成像,遍历所有的子孔径回波数据,得到连续的一级子孔径SAR 图像序列。本节后续内容中会出现较多名词术语,下面进行定义:全孔径表示一条完整的回波数据;子孔径表示一条完整回波数据中的一部分;一级子孔径数据表示对全孔径回波数据进行划分得到的数据;一级子孔径图像表示一级子孔径数据经成像处理得到的图像;二级子孔径数据表示对经方位向傅里叶变换后的一级子孔径图像数据进行划分得到的数据;二级子孔径图像表示二级子孔径数据经成像处理得到的图像。

图1 子孔径划分示意图Fig.1 Diagram of subaperture division
ρi,j(x)为序列中第i帧与第j帧图像间的相关系数为[16]
式中:x为第i帧与第j帧一级子孔径图像对应的回波数据间的重叠因子;T为各帧的持续时间;w(t)为加权函数,用于平滑一级子孔径图像的频谱。
根据式(1)可以看出2 帧图像间的相关系数是关于重叠因子x的函数,图2 给出了相关系数的变化曲线,所作加权为海明加权,α从0.54 到1。从图2可以看出相关系数ρi,j随着重叠因子x的增大而增大,当2帧图像对应的回波数据完全重叠(即重叠因子为1)时,2帧图像间的相关系数达到最大值1。
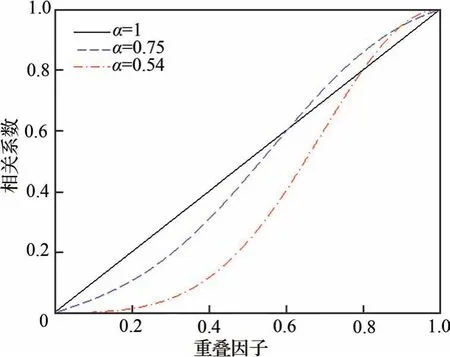
图2 相关系数变化曲线Fig.2 Variation curves of correlation coefficient
不重叠子孔径划分方式得到的各子孔径回波数据间的重叠因子为0,因此成像所得的一级子孔径SAR 图像序列中的不同帧之间的相关性都较差。本文算法首先采用一级重叠子孔径划分方式[17-18]划分全孔径回波数据,利用相邻一级子孔径回波数据间的重叠部分[19]提高成像结果间的相关性,如图1(c)所示。对一级子孔径图像沿着方位向做傅里叶变换,此时数据由图像域转换至距离压缩相位历史域。为使每个二级子孔径数据长度相等并且相应的二级子孔径图像序列的相邻帧间的相关性达到最强,这里设置相邻一级子孔径回波数据之间存在重叠率为50%的相位历程。然后,将一级子孔径图像数据沿着方位向一分为二得到二级子孔径数据,如图1(d)所示。图1(c)中的i和i+1 为相邻的一级子孔径数据,它们对应的一级子孔径图像的频谱重叠部分为图1(d)中的二级子孔径数据i2和(i+1)1,对i2和(i+1)1分别沿着方位向做傅里叶逆变换得到二级子孔径图像。上述2 帧图像对应完全相同的一段回波数据,由相同脉冲经成像处理得到的2 帧图像间的相关性理应最强。因此当二级子孔径图像i2和(i+1)1分别作为参考图像和待配准图像时,同名点提取的数量和稳定性都得到了提高。
PFA 算法中的平面波前假设在场景较大时误差会变大,导致成像结果散焦。同时,载机平台运动不稳定以及电磁波传播误差等产生相位误差也应当考虑,为了得到聚焦良好的子孔径图像,本文提出了一种适用于子孔径图像的自聚焦处理方法,具体流程如图3 所示。图4 为SAR 图像序列中相邻2 帧一级子孔径图像及对应的4 帧二级子孔径图像,可以看出二级子孔径图像经过上述自聚焦处理后都达到了较好的聚焦效果。
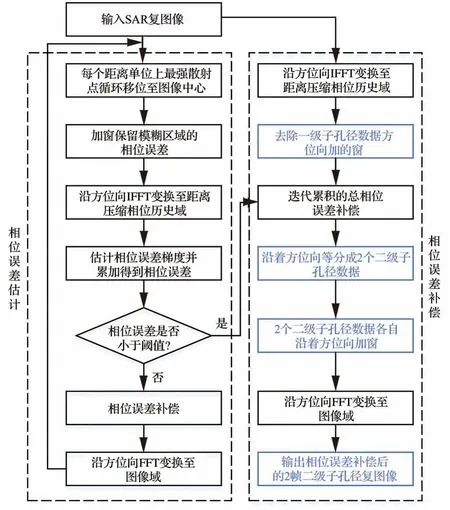
图3 子孔径自聚焦处理流程图Fig.3 Flow chart of autofocusing subaperture processing

图4 相邻2 帧一级子孔径图像及对应的4 帧二级子孔径图像Fig.4 Two adjacent primary subaperture images and four corresponding secondary subaperture images
本文提出的子孔径自聚焦处理方法中的相位误差估计流程与PGA 算法一致,针对相位误差补偿流程做了适应性调整,主要分为如下4 点:① 为避免旁瓣过高掩盖距离单元上的最强散射点从而降低后续自聚焦处理效果,去除一级子孔径数据在方位向所加的窗;② 将经过相位误差补偿后孔径复用率为50%的原始一级子孔径数据如图1(c)中的i沿着方位向将频谱等分成2 个二级子孔径数据i1和i2;③ 2 个二级子孔径数据各自沿着方位向加窗,本文所用窗函数均为海明窗;④ 经过对回波数据进行图1(c)的一级重叠子孔径划分和对方位频谱进行图1(d)的二级重叠子孔径划分及子孔径自聚焦处理后输出2 帧尺寸一致、互不重叠的聚焦良好的二级子孔径图像。
2.2 基于脉内和脉间的子孔径图像配准
本文中各子孔径图像间的配准方法存在差异,分为2 种:脉内子孔径图像配准和脉间子孔径图像配准。
脉内子孔径图像的配准即图1(d)中二级子孔径数据i1和i2对应图像的配准与二级子孔径数据(i+1)1和(i+1)2对应图像的配准。二级子孔径图像i1和i2、二级子孔径图像(i+1)1和(i+1)2在同一成像孔径内,同一成像孔径内的数据选取的参考点一致,因此同一孔径内的2 帧二级子孔径图像的几何位置信息完全一致,差别仅在于对应像素点的灰度信息不一致,后续无需再进行配准。此时的二级子孔径图像i1、(i+1)2已分别完成了以二级子孔径图像i2、(i+1)1为参考图像的配准。
脉间子孔径图像的配准即图1(d)中二级子孔径数据i2和(i+1)1对应图像的配准与二级子孔径数据i2和(i+1)2对应图像的配准。以二级子孔径图像i2为参考图像,以二级子孔径图像(i+1)1和(i+1)2为待配准图像的配准方法又不相同。二级子孔径图像i2和(i+1)1利用SIFT+RANSAC算法进行特征点检测和特征描述算子构建得到二级子孔径图像(i+1)1的配准结果。由于二级子孔径图像(i+1)1和(i+1)2经过了脉内子孔径图像配准,所以它们的几何位置信息完全一致,可以将二级子孔径图像i2和(i+1)1的配准结果之间的仿射变换矩阵M[20]直接传递给二级子孔径图像(i+1)2从而完成二级子孔径图像i2和(i+1)2的配准。此时二级子孔径图像(i+1)1和(i+1)2都已完成了以二级子孔径图像i2为参考图像的配准。
为了能够明显地看出本文配准算法的配准效果,直观地比较各个像素点几何变换后的配准位置是否准确,将二级子孔径图像i1、i2和(i+1)2的配准结果进行非相干叠加得到融合图像。图4 中的二级子孔径图像配准及融合的流程如图5所示。
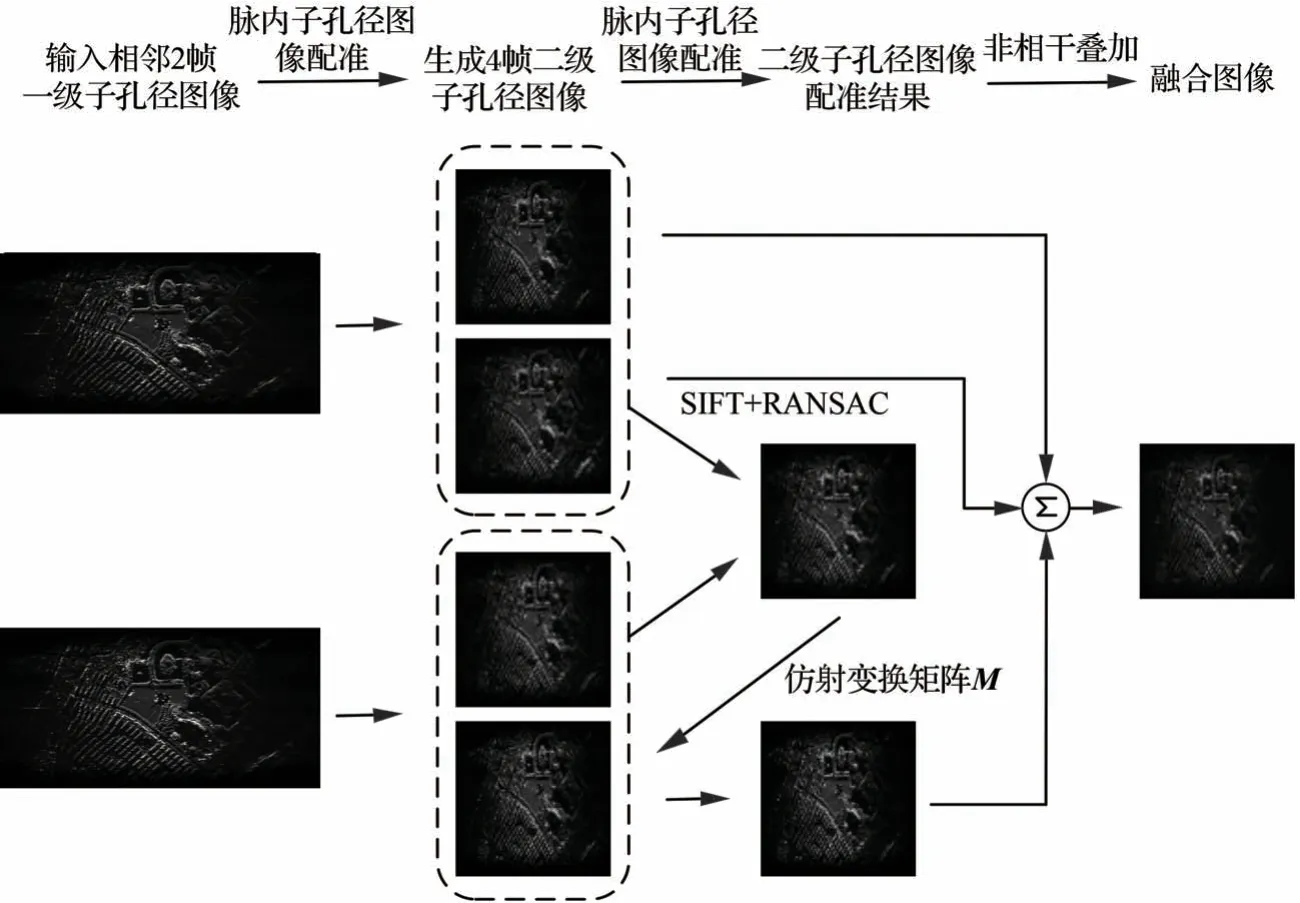
图5 二级子孔径图像配准及融合流程图Fig.5 Flow chart of secondary subaperture image registration and fusion
3 实验与分析
3.1 实验数据
为了验证本文算法的有效性和适用性,选取了3 个不同场景的实测数据进行实验。表1 给出了实测数据主要参数。图6 为3 个场景的连续2 帧原始成像结果,都是按照一级重叠子孔径划分方式划分原始回波数据,每段一级子孔径回波数据包含2 048 个脉冲,相邻孔径间的脉冲重叠率为50%,一级子孔径图像的分辨率为1.2 m,由于成像结果未经过自聚焦处理,存在一定程度的散焦。

表1 实测数据主要参数Table 1 Main parameters of measured data

图6 3 个场景连续2 帧的原始成像结果Fig.6 Original imaging results of two consecutive frames of three scenes
3.2 评价方式
为了评价配准算法的性能,本文从主观和客观2 个角度出发。主观上,将参考图像与配准结果进行非相干叠加,融合图像的清晰程度可以直观地反应配准效果。客观上,采用均方根误差(RMSE)、最大误差(ME)、匹配正确率(CMR)这3 个评价指标量化配准效果,通过图像熵和图像对比度来评估非相干叠加后的融合图像质量。
1) 均方根误差定义为
式中:N为同名点数量,经配准可得到参考图像与待配准图像中一一对应的同名点集合,本文以参考图像中的点坐标值作为同名点坐标的参考真值和分别为参考图像和待配准图像中第i对同名点的坐标为待配准图像中经过仿射变换后的配准结果中的坐标。均方根误差代表了图像配准结果与参考图像中所有同名点的位置累积误差,误差越小表示配准效果越好。
2) 最大误差定义为
最大误差代表了图像配准结果与参考图像中所有同名点的最大位置误差,误差越小表示配准效果越好。
3) 匹配正确率定义为
式中:NC为所有同名点中正确匹配数量。正确匹配率越大表示配准效果越好。
4) 二维SAR 图像熵[21]定义为
式中:Na、Nr分别为图像方位向点数和距离向点数为图像中第(m,n)点像素的强度密度;为图像的总能量。
5) 图像对比度[22]定义为
式中:σ(·)表示图像强度的标准差;E(·)表示图像强度的均值;|I(m,n)|表示图像中第(m,n)点像素的强度。
3.3 实验结果与分析
图6 中3 个场景连续2 帧的原始成像结果为一级重叠子孔径图像,由于每帧一级子孔径图像对应的回波数据包含2 048 个脉冲并且相邻孔径间的脉冲重叠率为50%,因此连续2 帧一级子孔径图像对应的回波数据实际共包含了3 072 个脉冲,2 帧一级子孔径图像在方位频谱上进行二级重叠子孔径划分得到二级子孔径图像1、2、3、4,如图4 所示。每帧二级子孔径图像对应的回波数据包含1 024 个脉冲,其中二级子孔径图像2 和3对应同一段回波数据,即相邻一级子孔径回波数据的重叠部分,以二级子孔径图像2 为参考图像,二级子孔径图像1、3、4 为待配准图像,根据脉内和脉间子孔径图像的不同按照2.2 节介绍的子孔径图像配准方法进行配准实验;对比实验将包含这3 072 个脉冲的回波数据按不重叠子孔径划分方式等分成3 段并各自进行成像处理得到连续3 帧一级子孔径图像。
图7 为上述3 帧一级子孔径图像经过PGA处理后的结果,将3 帧图像的中间帧作为参考图像,第1 帧和第3 帧作为待配准图像,将SIFT+RANSAC 算法作为对比算法进行配准对比实验。本文算法中的4 帧二级子孔径图像与对比算法中的连续3 帧一级子孔径图像对应的总回波数据相同,作为参考图像的二级子孔径图像2 与第2帧一级子孔径图像对应的回波数据也相同,并且每帧图像对应的成像脉冲数一致,保证了配准过程中所有图像的分辨率一致,成像结果都经过自聚焦处理。

图7 用于SIFT+RANSAC算法的3个场景连续3帧图像Fig.7 Three consecutive frames of three scenes for SIFT+RANSAC algorithm
图8~图10 显示3 组实验的图像配准结果。其中,(a)、(b)分别是对比算法的匹配点对连线图;(c)为对比算法的第1 帧图像的配准结果、第2帧图像和第3 帧图像的配准结果进行非相干叠加得到的融合图像及局部细节图;(d)为本文算法的匹配点对连线图;(e)为本文算法的子孔径图像1、2 和子孔径图像4 的配准结果进行非相干叠加得到的融合图像及局部细节图。
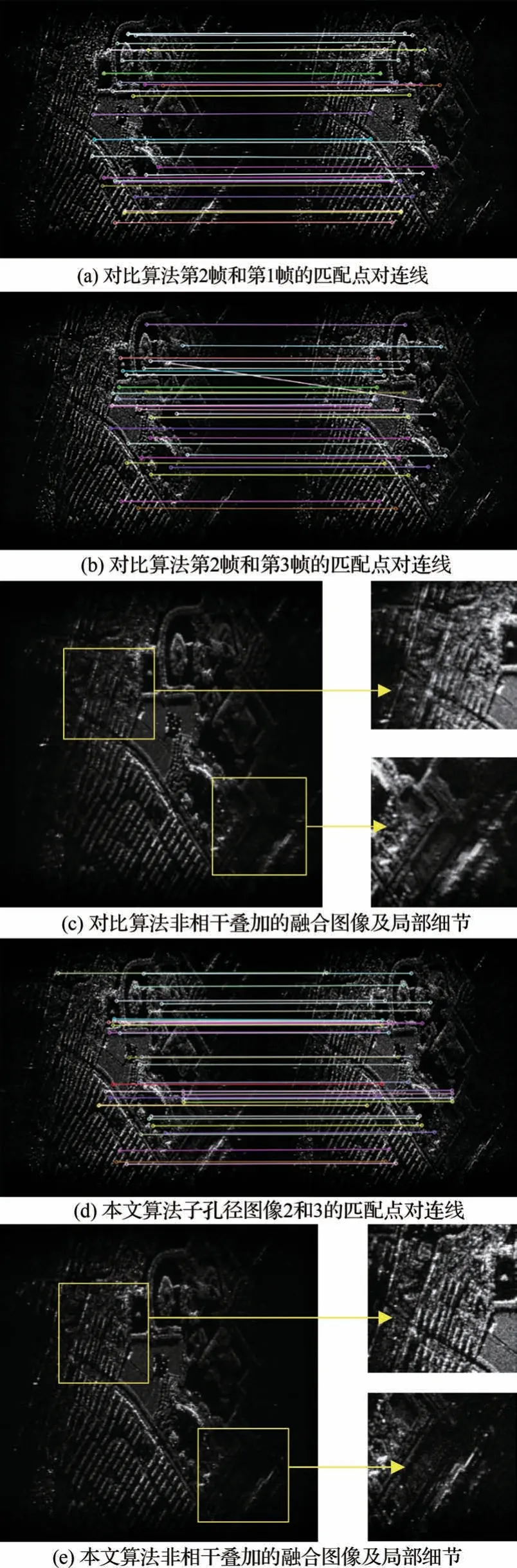
图8 场景1 本文算法及SIFT+RANSAC 算法图像配准结果Fig.8 Image registration results of proposed algorithm and SIFT+ RANSAC algorithm for Scene 1

图9 场景2 本文算法及SIFT+RANSAC 算法图像配准结果Fig.9 Image registration results of proposed algorithm and SIFT+ RANSAC algorithm for Scene 2

图10 场景3 本文算法及SIFT+RANSAC 算法图像配准结果Fig.10 Image registration results of proposed algorithm and SIFT+ RANSAC algorithm for Scene 3
比较图8~图10 中本文算法与对比算法的融合图像及局部细节,可以直观地看出3 个场景中本文算法的融合图像的图像质量都明显优于对比算法,局部细节都较为清晰、不存在模糊区域。从主观视觉上,本文算法的配准效果较对比算法更优。为了从客观上定量衡量本文算法与对比算法的优劣,本文分别从配准效果、融合图像质量和处理时间3 个角度来评估。通过匹配点对、匹配正确率、均方根误差和最大误差4 个评价指标来评估配准效果,如表2 所示。通过图像熵和图像对比度2 个指标来评估融合图像的质量,如表3 所示。表4 为算法处理时间统计。

表2 3 个场景中本文算法与SIFT+RANSAC 算法配准性能对比Table 2 Comparison of registration performance between proposed algorithm and SIFT+RANSAC algorithm
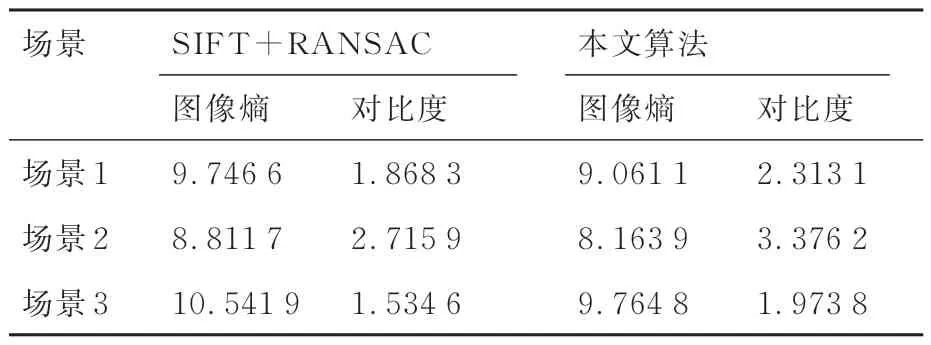
表3 3 个场景中本文算法与SIFT+RANSAC 算法的融合图像质量对比Table 3 Comparison of fusion image quality between proposed algorithm and SIFT+RANSAC algorithm

表4 3 个场景中本文算法与对比算法处理时间对比Table 4 Comparison of processing time between proposed algorithm and comparison algorithm
从表2 可以看出,SIFT+ RANSAC 算法的匹配点对N有2 个值,分别是第2 帧与第1 帧的匹配点对数量和第2 帧与第3 帧的匹配点对数量,3 个场景中本文算法的匹配点对数量均多于对比算法,匹配正确率均为100%,原因是脉内的2 帧子孔径图像经成像处理之后几何位置信息完全一致,无需进行额外的配准,而脉间相邻的2 帧由相同脉冲成像所得的子孔径图像之间具有强相关性,即使未进行相干斑噪声的滤波处理,配准时仍能较好克服相干斑噪声的影响,提取出更多的同名点。本文算法的均方根误差基本在2 个像素之内,最大配准误差基本在6 个像素之内,远小于SIFT+RANSAC 算法,原因是对比实验中的连续3 帧图像不存在重叠的相位历史域,3 帧图像间的相关性较差,随机分布的相干斑噪声带来了较大的配准误差。表2 表明本文算法能获得更多的正确匹配点对,具有较高的配准精度和较强的鲁棒性。
从表3 可以看出,本文算法在3 个场景中的融合图像熵值均明显小于SIFT+RANSAC 算法的图像熵值、对比度均明显大于对比算法的图像对比度,本文算法的图像熵值降低了7%以上,图像对比度提升了23%以上。表3 表明本文算法所得的融合图像聚焦效果更好,图像更清晰,配准结果中的各像素点与参考图像中的对应像素点匹配更精确。
算法处理流程包含SAR 成像、自聚焦处理和图像配准3 个部分,因此本文统计的算法处理时间分为成像+自聚焦和图像配准2 个部分,如表4所示。从表4 可以看出,本文算法在成像和自聚焦处理时耗时较长,这是因为用于本文算法成像的一级子孔径回波数据包含的脉冲数是SIFT+RANSAC 算法的2 倍,并且子孔径自聚焦处理和二级子孔径划分导致本文算法较SIFT+RANSAC 算法更复杂;本文算法在进行图像配准时耗时较SIFT+RANSAC 算法缩短了53%以上,这是因为SIFT+RANSAC 算法需进行2 次配准,分别以左右2 帧为待配准图像向中间帧进行配准,而本文算法只需进行一次配准,即二级子孔径图像2 和3 之间的配准,二级子孔径图像1、2 和二级子孔径图像3、4 分别在同一成像孔径内,两两之间的几何位置信息完全一致,无需再进行额外的配准。
4 结 论
本文针对SAR 图像中无序分布的相干斑噪声导致配准效果不理想的弊端,提出了一种基于重叠子孔径回波信息的SAR 图像配准算法,配准效果得到了显著提高。主要结论如下:
1) 为了克服配准过程中包含相干斑噪声的参考图像和待配准图像之间相关性差的问题,利用复用率为50%的相邻一级子孔径回波数据间的重叠部分提高成像结果间的相关性,再对一级子孔径图像的方位频谱进行二级子孔径划分得到两帧强相关的二级子孔径图像,它们是由回波重叠部分成像所得,同名点提取的数量和稳定性都得到了提高。
2) 由SAR 复图像数据返回相位历史域,并结合适用于子孔径图像的自聚焦算法得到2 帧聚焦效果良好的子孔径复图像,充分利用了SAR 复图像的相位信息。
3) 对脉内和脉间的子孔径图像使用不同的图像配准方法进行配准。脉内子孔径图像由于在同一成像孔径内,选取的参考点一致,因此经成像处理后几何位置信息完全一致;脉间子孔径图像之间的配准采用SIFT+RANSAC 算法。
猜你喜欢
哈尔滨轴承(2020年2期)2020-11-06
今日中国·法文版(2020年7期)2020-07-04
中国特种设备安全(2019年1期)2019-03-13
光学仪器(2018年3期)2018-10-10
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
雷达学报(2017年1期)2017-05-17
科技创新与应用(2017年11期)2017-04-27
海军航空大学学报(2016年6期)2016-12-27
光学精密工程(2016年1期)2016-11-07
山东青年(2016年2期)2016-02-28
