机器人辅助步态训练对脑卒中患者步态影响的Meta分析*
2023-06-25 06:39雒甜甜徐秀瑛甘华松张丽丽周亚莉李贵香
现代临床护理 2023年3期
雒甜甜,徐秀瑛,甘华松,张丽丽,周亚莉,李贵香
(1 福建中医药大学护理学院,福建福州,350122;2 福建省厦门市仙岳医院康复与社会工作管理部,福建厦门,361000)
脑卒中是由脑血管破裂或堵塞引起的脑功能紊乱[1],其具有高发病率、高致残率等特点,是目前世界范围内成年人残疾的主要原因之一[2]。据统计,我国总体卒中终生发病风险为39.9%,位居全球首位[3],在患者中,约3/4 遗留不同程度的功能障碍,如偏瘫及平衡功能障碍等[4]。下肢功能障碍作为脑卒中患者最常见的功能障碍之一, 伴随步态明显的不对称性,步态参数表现为步宽加大,步长及步幅缩短、步频和步速降低等。患者常因步态不稳、步态速度和姿势控制能力降低增加跌倒风险[5],不仅直接影响患者的行动能力和日常生活, 还会大大降低其生存质量[6]。因此,改善患者卒中后的步态模式,下肢运动功能康复训练尤为重要。机器人辅助步态训练作为一种新兴且高效的康复训练手段, 其特点是通过应用机器人系统帮助患者进行运动再学习, 从而模拟正常的生理步态模式,避免偏瘫步态[7]。目前,国内外关于机器人辅助步态训练对脑卒中患者干预效果的系统评价, 多针对下肢运动功能及平衡功能的分析[8-9],尚未对相关研究的步态参数进行定量综合评价, 且该训练在脑卒中下肢功能障碍患者相关步态参数中虽有较多应用,但干预效果仍存在争议[10]。因此, 本研究通过对机器人辅助步态训练在脑卒中下肢功能障碍患者步态的干预效果进行Meta 分析,从而为临床中的应用提供循证依据。
1 资料与方法
1.1 文献纳入标准
1.1.1 研究类型 研究机器人辅助步态训练对脑卒中下肢功能障碍患者步态干预效果的随机对照试验(randomized condomized trial,RCT)。
1.1.2 研究对象 诊断标准符合1989年WHO 脑卒中诊断标准[11]或1995年全国第四次脑血管病会议制定的诊断标准[12],经相关影像学检查首次确诊的对象。纳入标准:①年满18 周岁,首次发病且存在下肢功能障碍的患者;②生命体征平稳,意识清晰,无认知障碍及其他神经系统疾病。
1.1.3 干预措施 对照组采用常规康复治疗(重量支持训练、步态训练,平衡训练等);干预组在对照组基础上进行机器人辅助步态训练干预。
1.1.4 结局指标 ①步态参数(步速、步长、步频、步幅、步宽):采用步态分析系统测量步态参数,10m 步行试验(10-meter walk test,10MWT)仅测量步速;②耐力: 采用6min 步行试验 (6-minute walking test,6MWT)测量;③平衡功能:采用Berg 平衡量表(Berg balance scale,BBS)评估;④下肢运动功能:采用Fugl-Meyer 评分法(Fugl-Meyer assessment,FMA)评估下肢部分。文献为符合以上指标中任一即可纳入进行数据合并。
1.2 文献排除标准
①同一研究重复出版物或二级分析;②数据不全或无法进行数据提取的文献;③干预时间不明确。
1.3 文献检索策略
计算机检索8 个数据库:CochraneLibrary、PubMed、Web of Science、Embase、中国生物医学文献数据库(CBM)、中国知网、维普、万方数据库,检索时限均为建库至2022年5月。检索词:脑卒中/中风/脑梗死/脑缺血/脑出血/偏瘫/机器人/下肢/步态/随机;stroke/cerebral infarction/cerebral ischemia/cerebral hemorrhage/ hemiplegia/ robot/ lowerlimb/ lokomat robot/gait/Randomized controlled trial/randomization/ RCT。以PubMed 检索流程为范例,见图1。对于非公开出版文献、非常规文献、难以获取文献等进行灰色文献网、俄罗斯国立科技公共图书馆或OpenSIGLE 数据库检索。

图1 PubMed 检索流程图
1.4 文献筛选和资料提取
由2 名研究者阅读全文后按照已制定好的纳入标准与排除标准,分别进行文献筛选以及资料提取,提取信息包括纳入研究的特征以及纳入研究参与者的相关特征。若出现不同意见,则由第3 名研究者仲裁后决定其是否纳入。文献筛选具体步骤:①将检索文献全部导入EndNote 软件进行查重和初筛,非RCT 的研究剔除;②阅读题目和摘要,进一步筛选符合纳入标准与排除标准的文献;③全文阅读,纳入最终文献。
1.5 文献质量评价
由2 名研究者分别进行文章质量评价,参照Cochrane 随机对照试验偏倚风险评估工具[13],评估内容见表2。若评估内容全为低风险,说明几乎不发生偏倚,质量为A 级;若部分满足低风险,说明发生偏倚的风险为中等,质量为B 级;若都不满足低风险,说明发生偏倚的风险极高,质量为C 级。
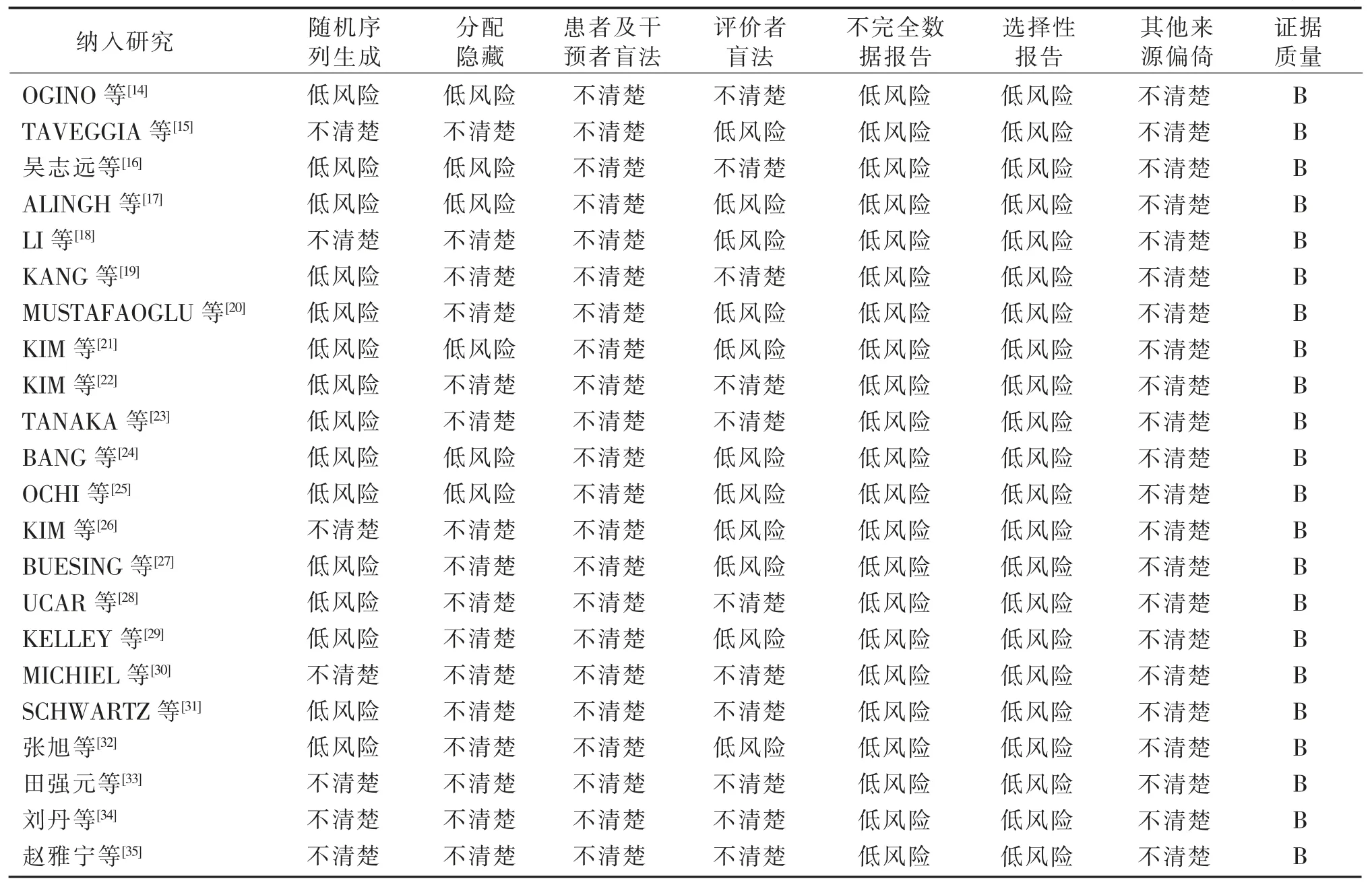
表2 纳入文献的质量评价(n=22)
1.6 统计学方法
采用RevMan5.3 软件进行数据分析。计量资料:采用均数差(MD)或标准化均数差(SMD)及95%置信区间(CI)表示。采用I2定量判断研究间的异质性,若P≥0.05,I2<50%,选用固定效应模型进行分析;若P<0.05,I2≥50%,异质性来源于统计学,则采用随机效应模型;若异质性来源于方法学,则进行亚组分析或放弃合并,只对结果进行统计描述。结果稳定程度:采用逐一剔除法对剩余文献进行敏感性分析,观察合并结果的变化情况。发表偏倚采用SPSS 16 软件分析,Egger’s 检验法判定是否存在发表偏倚,以P<0.05 判定存在发表偏倚。
2 结果
2.1 文献检索结果
初检得到相关文献2 983 篇(中文1 215 篇,英文1 768 篇,通过其他资源补充获得文献0 篇)。剔除重复文献1 518 篇,阅读题目和摘要后排除文献1 408 篇,初步筛选得到文献57 篇。阅读剩余文献全文后,去除干预方法和结局指标不符、干预时间不明、重复发表及无法获取数据的文献后,最终纳入文献共22 篇[14-35],其中中文文献5 篇,英文文献17 篇。文献筛选流程图及结果见图2。
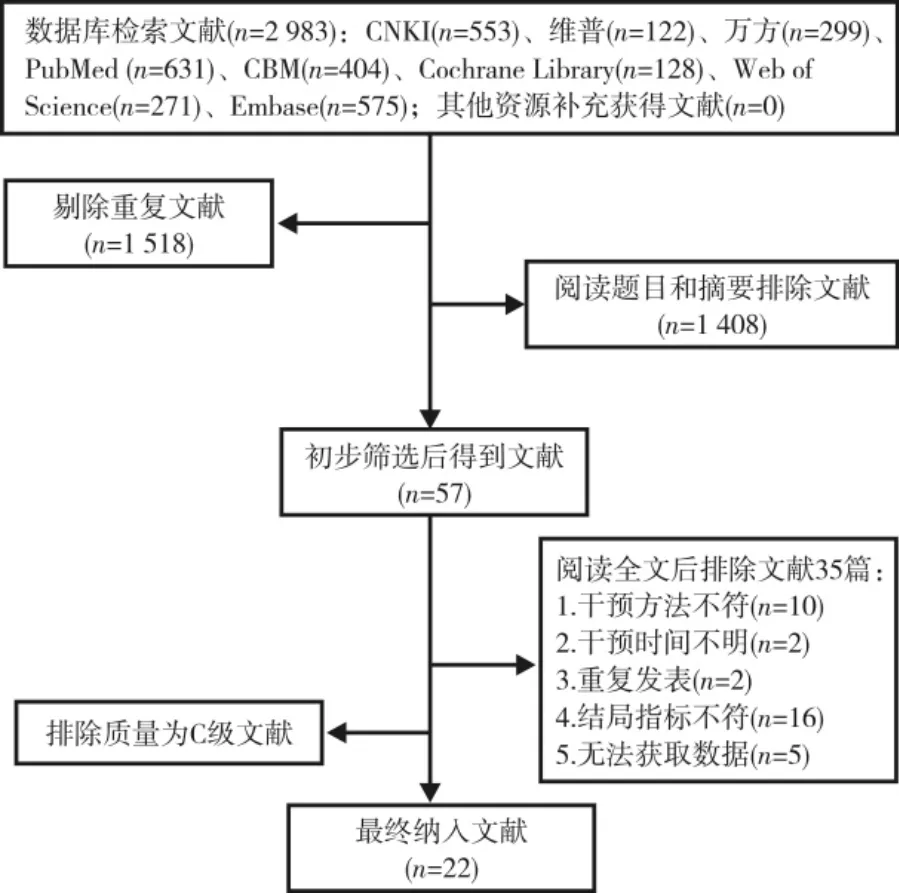
图2 文献筛选流程图及结果
2.2 纳入文献的基本特征
纳入文献的基本特征见表1。由表1 可见,纳入的22 篇文献,合计902 例患者,其中对照组456 例,干预组446 例。21 篇文献[14-25,27-35]探讨了机器人辅助步态训练对脑卒中患者步态参数的影响;7 篇文献[14-15,17-18,20,29,32]探讨了机器人辅助步态训练对脑卒中患者耐力的影响;10 篇文献[16,19,21-22,24,26,32-35]探讨机器人辅助步态训练对脑卒中患者平衡功能的影响;7篇文献[16-18,20-21,33-34]探讨了机器人辅助步态训练对脑卒中患者下肢运动功能的影响。
2.3 方法学质量评价
纳入文献采用Cochrane 随机对照试验偏倚风险评估工具[13]进行评价,结果纳入的22 篇文献均为B 级,质量中等,纳入文献质量评价见表2。
2.4 Meta 分析结果
2.4.1 机器人辅助步态训练对脑卒中患者步态参数的影响
2.4.1.1 步速 21 篇文献[14-25,27-35]报道了机器人辅助步态训练对脑卒中患者步速的影响,见图3。由图3 可见,各研究无明显异质性(P=0.40,I2=5%),采用固定效应模型,Meta 分析结果显示:MD=0.08,95%CI(0.06,0.09),P<0.001,差异有统计学意义。因研究间采用步态分析系统和10MWT 两种方式进行步速测量,故进行亚组分析。其中8 篇文献[16-19,23-24,27,33]采用步态分析系统测量,各研究无明显异质性(P=0.53,I2=0%),采用固定效应模型进行分析;10 篇文献[14-15,20-22,29-32,34]采用10MWT,各研究无明显异质性(P=0.31,I2=15%),采用固定效应模型进行分析,Meta分析结果显示:MD=0.05,95%CI(0.01,0.10),P=0.02,亚组分析结果提示不同测量方式对步速影响不大,分析结果较为稳定。其余3 篇文献[25,28,35]因数据不能合并,仅进行描述性分析。赵雅宁等[35]使用步态分析系统测量步速,研究显示,接受Lokomat 康复机器人训练步速改善效果明显优于常规康复治疗。OCHI等[25]及UCAR 等[28]在常规治疗基础上进行机器人辅助步态训练, 发现两组间的步速没有显著差异,但增加肌肉扭矩很可能会提高步速。
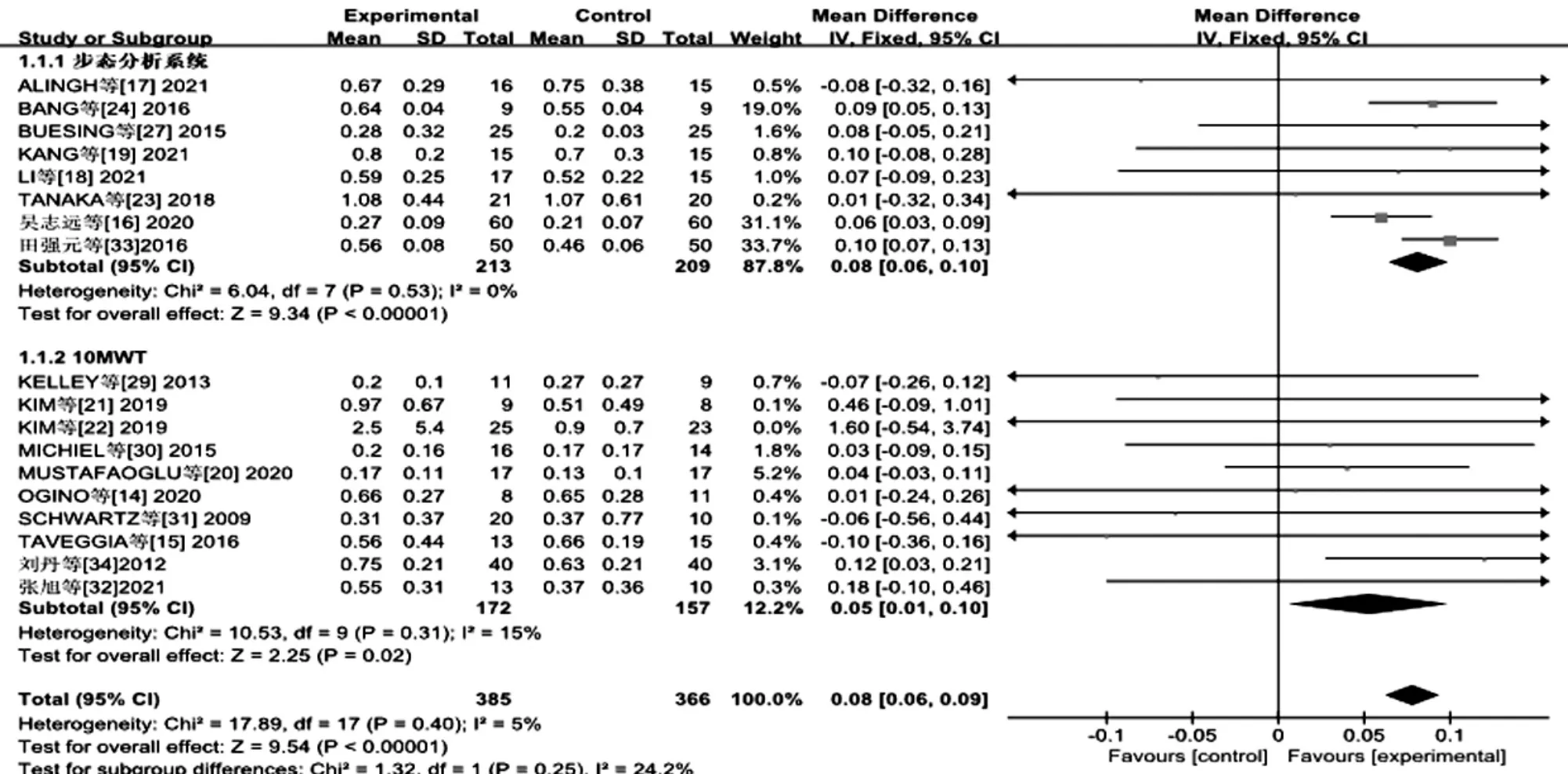
图3 机器人辅助步态训练对脑卒中患者步速的影响

表1 纳入文献的基本特征(n=22)
2.4.1.2 步长 9 篇文献[17-19,23-24,27,33-35]报道了机器人辅助步态训练对脑卒中患者步长的影响,见图4。由图4 可见,各研究间存在较大异质性(P=0.001,I2=69%),采用随机效应模型进行分析,Meta 分析结果显示:MD=3.58,95%CI(2.01,5.15),P<0.001,差异有统计学意义,干预组步长改善效果优于对照组。
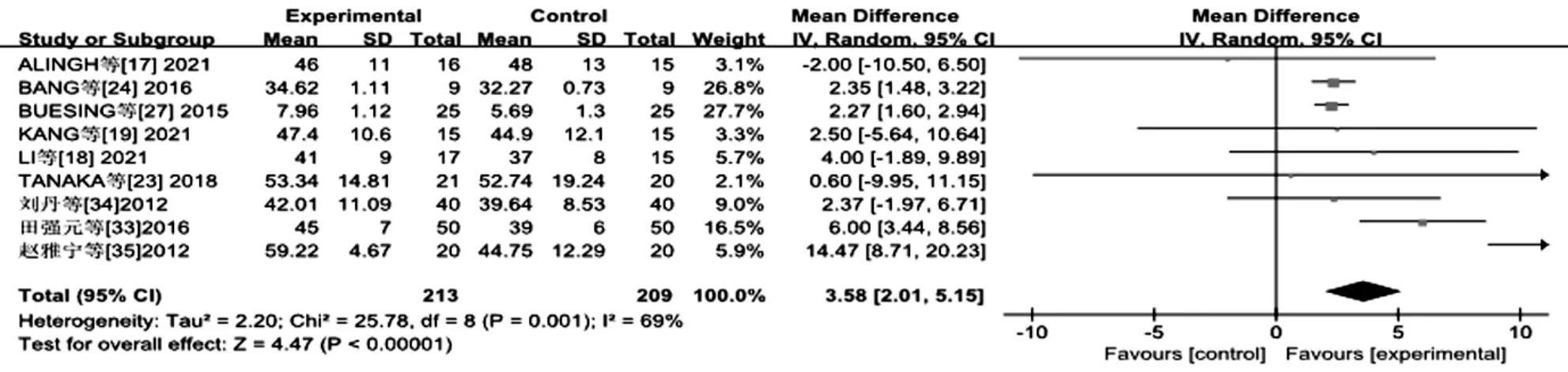
图4 机器人辅助步态训练对脑卒中患者步长的影响
2.4.1.3 步频 10 篇文献[14,16,18-19,23-24,27,33-35]报道了机器人辅助步态训练对脑卒中患者步频的影响, 见图5。由图5 可见,各研究间存在较大异质性(P<0.001,I2=78%),采用随机效应模型进行分析,Meta 分析结果显示:SMD=0.77,95%CI(0.36,1.18),P<0.001,差异有统计学意义,干预组步频改善效果优于对照组。
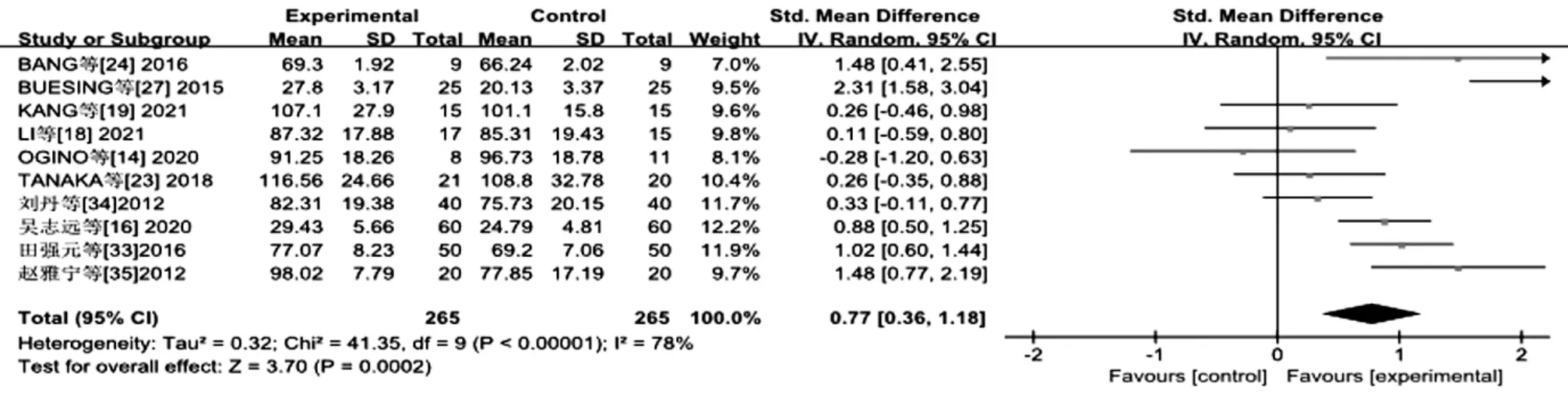
图5 机器人辅助步态训练对脑卒中患者步频的影响
2.4.1.4 步幅 4 篇文献[14,18-19,27]报道了机器人辅助步态训练对脑卒中患者步幅的影响,见图6。由图6可见,各研究间无明显异质性(P=0.88,I2=0%),采用固定效应模型进行分析,Meta 分析结果显示:MD=2.35,95%CI(1.12,3.57),P<0.001,差异有统计学意义,干预组步幅改善效果优于对照组。1 篇文献[16]因数据未能合并,因此采用描述性分析,该研究采用下肢康复机器人作为干预,协助脑卒中患者进行康复训练,研究结果显示:治疗8w 后患者的左右步幅差明显减少且低于对照组。
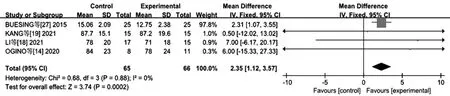
图6 机器人辅助步态训练对脑卒中患者步幅的影响
2.4.1.5 步宽 2 篇文献[17,35]报道了机器人辅助步态训练对脑卒中患者步宽的影响,见图7。由图7 可见,各研究间存在较大异质性(P=0.14,I2=54%),采用随机效应模型进行分析,Meta 分析结果显示:MD=-0.91,95%CI(-4.17,2.34),P=0.58,差异无统计学意义,干预组步宽改善效果并不优于对照组。

图7 机器人辅助步态训练对脑卒中患者步宽的影响
2.4.2 机器人辅助步态训练对脑卒中患者耐力的影响 7 篇文献[14-15,17-18,20,29,32]报道了机器人辅助步态训练对脑卒中患者耐力的干预效果,见图8。由图8可见,各研究无明显异质性(P=0.16,I2=36%),采用固定效应模型进行分析,Meta 分析结果显示:MD=26.75,95%CI(6.89,46.60),P=0.008,差异有统计学意义,干预组耐力改善效果优于对照组。
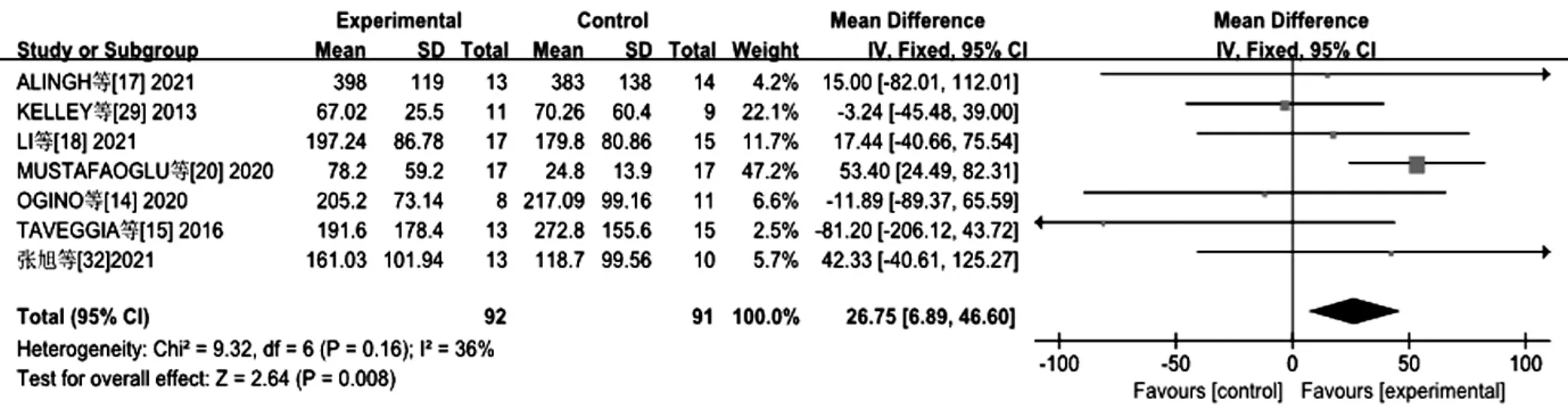
图8 机器人辅助步态训练对脑卒中患者耐力的影响
2.4.3 机器人辅助步态训练对脑卒中患者平衡功能的影响 10 篇文献[16,19,21-22,24,26,32-35]报道了机器人辅助步态训练对脑卒中患者平衡功能的影响,见图9。由图9 可见,各研究间存在较大异质性(P<0.001,I2=81%),采用随机效应模型进行分析,Meta 分析结果显示:MD=3.29,95%CI(1.64,4.94),P<0.001,差异有统计学意义,干预组平衡功能改善效果优于对照组,且干预措施与时间之间有明显的交互作用。为进一步处理统计学异质性,依据不同的干预时间分为干预时间≥4w 和干预时间<4w 两个亚组,其中8项研究[16,21,24,26,32-35]干预时间≥4w,各研究无明显异质性(P=0.59,I2=0%),采用固定效应模型进行分析,Meta 分析结果显示:MD=4.26,95%CI(3.68,4.85),P<0.001,差异有统计学意义,干预组平衡功能改善效果优于对照组;2 项研究[19,22]干预时间<4w,各研究无明显异质性(P=0.21,I2=36%),采用固定效应模型进行分析,Meta 分析结果显示:MD=-1.14,95%CI(-5.59,3.32),P=0.62,差异无统计学意义,干预组平衡功能改善效果并未优于对照组,同时也提示不同干预时长可能是异质性的来源。
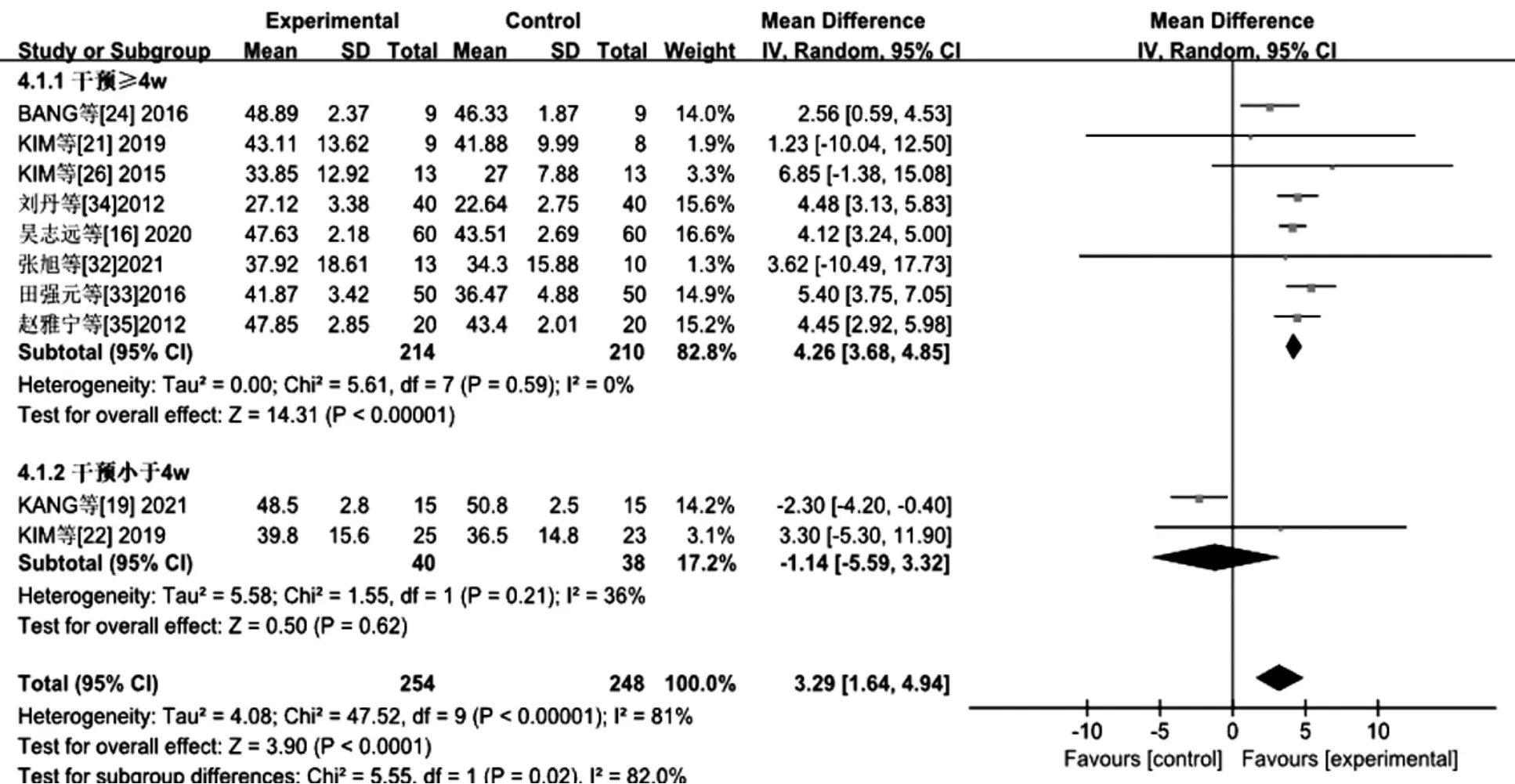
图9 机器人辅助步态训练对脑卒中患者平衡功能的影响
2.4.4 机器人辅助步态训练对脑卒中患者下肢运动功能的影响 7 篇文献[16-18,20-21,33-34]报道了机器人辅助步态训练对脑卒中患者下肢运动功能的影响,见图10。由图10 可见,各研究间存在较大异质性(P=0.02,I2=61%),采用随机效应模型进行分析,Meta 分析结果显示:MD=3.04,95%CI(1.73,4.35),P<0.001,差异有统计学意义,干预组下肢运动功能改善效果优于对照组。
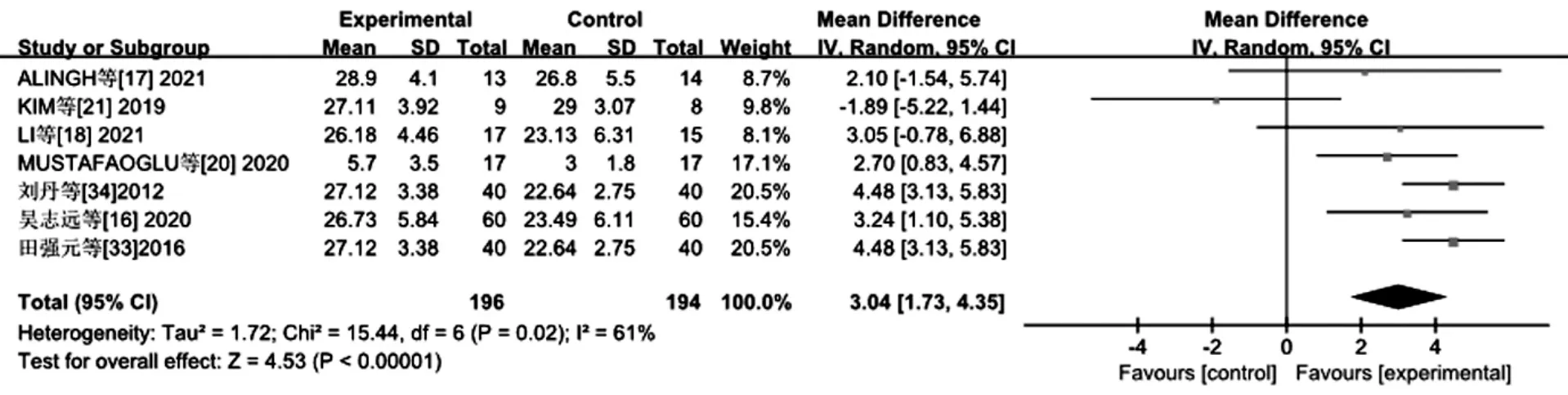
图10 机器人辅助步态训练对脑卒中患者下肢运动功能的影响
2.4.5 敏感性分析 进行步速的Meta 分析时,排除1 篇[23]干预周期最短且异质性较大的文献后,各研究仍无明显异质性(P=0.34,I2=10%),采用固定效应模型进行分析,Meta 分析结果显示:[MD=0.08,95%CI(0.06,0.09),P<0.001],合并结果并无明显变化,提示Meta 分析结果稳定。
2.4.6 发表偏倚分析 本研究纳入22 项随机对照试验,采用基于回归的Egger’s 检验法分别检测研究中关于步速和平衡功能研究文献>10 项的发表偏倚情况,见图11。由图11 可见,步速改善的文献检验结果显示:P=0.629>0.05;平衡功能改善的文献检验结果显示:P=0.058>0.05,提示无明显发表偏倚。
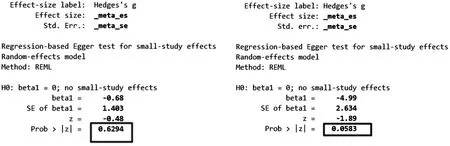
图11 步速、平衡功能发表偏倚Egger’s 检验结果
3 讨论
3.1 纳入研究方法学质量分析
本次纳入22 篇文献均为B 级,质量中等。所有研究均已描述有无退出和失访,且结局指标均有报道。其中15 篇文献[14,16-17,19-25,27-29,31-32]说明了使用随机区块、信封法或随机数表法的随机序列生成方式,6 篇文献[14,16,17,21,24-25]使用不透明信封进行分配隐藏,11 篇文献[15,17-18,20-21,24-27,29,32]对评价者施盲,因此产生测量偏移的可能性较小。尽管如此,本研究仍严格按照Meta 分析方法对纳入文献进行综合分析,且各项结局指标较为集中,总体证据可信度较高。
3.2 机器人辅助步态训练对脑卒中患者步态干预效果的分析
本研究结果显示,机器人辅助步态训练能提高脑卒中患者的步速和步频,增加步长及步幅,与相关研究报道相似[36-37]。其相关机制分析如下:第一,通过运用下肢康复机器人作为治疗工具,协助患者进行重复性、交互式和高强度的特定肢体训练任务,增加肢体摆动相对于地面的推进,降低患侧下肢张力,纠正足下垂等现象,进而提高患者的步速和步频、增加步长及步幅;第二,穿戴机器人后可给予患者一定助力,承担部分的肢体重量,控制患者训练的步速及下肢活动角度,通过模拟正常人的步行姿势,促进肌肉活动协调性, 实现重心转移, 从而提高步行速度,这将大大改善患者的步态能力[36-37]。此外,本研究发现,机器人辅助步态训练对于脑卒中患者的步宽改善效果并不显著,分析原因可能与报道此类指标的研究及样本量较少有关,建议今后增加样本量进一步研究。
本研究纳入机器人类型为外骨骼型康复机器人,此类机器人临床应用及研究更加广泛,其中大多数研究以Lokomat 外骨骼机器人训练为主。国外一项在Lokomat 机器人系统辅助研究中发现,患者下肢单支撑相时间差异明显缩小,不仅发现了脑卒中患者步态时间的不对称性,又为Lokomat 改善患者步态功能和偏侧化异常步态模式提供了依据[38],这与本研究机器人辅助步态训练改善脑卒中患者的步态功能发现一致。此外,本研究结果显示,Lokomat 康复机器人效果明显优于常规康复治疗, 尤其在步速、步长、步频等步态参数中效果更为显著。本次Meta分析纳入研究中有10 项研究[15,20-21,24,28-31,34-35]使用了Lokomat 康复机器人系统作为干预,干预时长为2~10w 不等,其中7 项[20-21,29-31,34-35]选择了6~10w 的干预时长,采取每周3~5 次,每次30~45min 的训练方式。分析不同研究采取的不同时长干预周期,可以发现周期较短时,研究者采取了增加每周次数或每次时长的调整方式以保证干预的效果。除了Lokomat机器人系统外,其他机器人辅助步态训练系统包括Lokohelp[33]、LOPES[17]及A3[16]型康复机器人等,都属于下肢外骨骼机器人,在脑卒中患者的步速、步频改善中均具有一定治疗效果。分析原因可能与康复机器人减重系统有关,该系统主要通过提高患者躯干及骨盆的稳定性,减小因肌力不足以及平衡功能欠佳对于步行训练的影响,从而提高步速和步频。
3.3 机器人辅助步态训练对脑卒中患者耐力干预效果的分析
本研究结果显示,机器人辅助步态训练能够有效改善脑卒中患者的耐力。其作用机制可能为:第一,下肢康复机器人作为可调节的体重支撑物,能够减轻患者因过量运动或错误动作导致的肌肉酸痛和疲劳,进而降低患者的最大耗氧量,提高运动耐力;第二,机器人辅助步态训练通过增加重复训练时长、强度和特异性,时刻测量患者下肢的负重,为患者提供有效反馈,同时对弱化的肌肉进行功能性电刺激,复制患者在训练期间正常的行走模式,从而快速恢复肌肉力量和耐力,增加患者短时间内的正常行走距离。目前,已有多项研究报道[39-40],认为机器人辅助步态训练可以通过改善脑卒中患者的耗氧量及疲劳程度,从而提高患者的运动耐力,这与本研究结果相似。
3.4 机器人辅助步态训练对脑卒中患者平衡及下肢功能干预效果的分析
本研究结果显示,机器人辅助步态训练对脑卒中患者的平衡和下肢运动功能改善效果较明显。可能与以下机制有关:其一,机器人辅助步态训练运用下肢康复机器人定时测量患者下肢运动轨迹,不断修正和调节关节的活动范围,调整下肢位置为其助力,以便纠正轨迹偏离,改善脑卒中患者步态的时空不对称性,最终促进平衡功能的改善和康复;第二,作为提供高重复性的任务训练,下肢康复机器人协调肌肉收缩能力增强,可使患者及时储存运动模式,强化当前步行姿势,诱导持久性的运动学习及神经功能重塑[41],进而有效改善脑卒中患者的下肢运动功能。
4 结论
本研究发现,机器人辅助步态训练可有效改善脑卒中患者的步态、平衡功能及下肢运动功能,提高患者步速和步频,增加步长及步幅。但本Meta 分析尚存在一定的局限性:①研究对象均为脑卒中患者,对于病程和脑卒中的类型未进行限制,范围比较广;②纳入研究质量中等,部分未提及盲法和分配隐藏;③部分研究样本量较小,且存在撤出及退出数据,仍需更多大样本且高质量的研究进行验证;④本研究仅对部分指标干预周期进行了系统分析,尚未对干预中的系统类型、 整体干预周期进行亚组分析。目前,康复机器人的相关研究仍然存在很大的发展空间,如与虚拟现实技术、机电技术和生物反馈技术等结合,伴随着科学技术的进步与发展,机器人相关功能不断得到改进和提升,这将为患者提供更为智能化、全面性的康复治疗带来美好的前景。
猜你喜欢
保健医苑(2023年2期)2023-03-15
河北理科教学研究(2021年3期)2022-01-18
发明与创新(2021年39期)2021-11-05
中华老年多器官疾病杂志(2021年5期)2021-05-27
中国老年学杂志(2021年23期)2021-03-29
实用医学杂志(2021年3期)2021-03-17
南昌大学学报(医学版)(2020年3期)2020-08-17
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
材料科学与工程学报(2016年1期)2017-01-15