分心驾驶事故场景研究
2023-06-23 04:07:16陈哲多何宇桐
汽车技术 2023年6期
陈哲多 何宇桐
(1.同济大学,上海 201804;2.上海联合道路交通安全科学研究中心,上海 201804)
主题词:交通事故 分心驾驶 场景 聚类分析 事故特征
1 前言
科学完善的场景是智能驾驶汽车评价体系的基础,其中,危险工况场景是验证汽车避撞能力的必要场景,而真实道路环境下的事故信息是危险工况场景的关键数据来源。美国国家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)的数据显示,25%~30%的交通事故由分心驾驶引起[1],驾驶人在分心状态下不能集中注意力且环境感知力下降,无法对道路上的危险信息进行有效辨识,导致事故风险概率增加。目前,基于国内事故数据的场景研究多以自动驾驶的安全测试需求为出发点,考虑不同的场景参与方进行场景构建[2-5]。然而,以事故原因为出发点的针对性场景研究对主动安全系统的验证同样具有重要的应用价值。
针对分心驾驶,部分学者探究了其与交通环境之间的关联性。Robert[6]等研究了简单和复杂道路环境下驾驶人分心驾驶的表现,结果表明,在复杂道路环境下更容易使驾驶人分心,驾驶人对危险的反应时间也相对较长;Kountouriotis[7]等发现道路曲率和其他车辆的存在均会对驾驶人产生不同程度的影响;Chen[8]等利用美国交通事故数据分析不同交通环境对分心驾驶事故的影响,发现城市化道路环境下分心驾驶事故发生率明显高于非分心驾驶事故。因此,不同的交通环境会在一定程度上对驾驶人分心产生影响,但目前相关研究成果尚少,且大部分研究通过设计具备不同环境复杂度的场景开展模拟试验,未能充分考虑环境因素的影响,很少有学者利用真实事故数据进行危险场景的研究。虽然驾驶模拟器可以根据不同研究对象模拟各种道路环境,但真实的交通事故环境往往比模拟环境更为复杂。
因此,本文对交通事故深度调查数据中的分心驾驶事故进行筛选,基于道路交通环境和事故参与方的运动状态确定特征参数,通过二阶聚类分析方法提取不同事故类型下的分心驾驶典型场景并进行特征分析,得到能够体现分心驾驶事故特征的核心场景,使主动安全技术的验证与评价更具针对性。
2 分心驾驶事故的数据来源
2.1 分心驾驶事故的定义
对于分心驾驶的定义,众多机构从多角度给出了解释,目前主要的定义有3 种:国际标准化组织认为分心驾驶是驾驶人将注意力转向与驾驶主任务不相关的人或事物上,从而导致感知能力下降的一种现象[9];澳大利亚道路安全委员会对分心驾驶的解释是驾驶人自愿或非自愿地转移驾驶任务(不因酒精、药物、疲劳等因素),并且切换任务是由于驾驶人执行额外的任务而将注意力短暂地集中在无关驾驶的事物、人和活动上[10];NTHSA认为分心驾驶是指驾驶人在驾驶过程中注意力由驾驶任务转移到另一项活动中的特定类型的注意力不集中[11]。
基于上述分心驾驶定义,考虑酒精、药物等因素导致的分心驾驶事故对场景搭建具有一定的参考意义,本文将分心驾驶事故定义为:驾驶人在驾驶过程中由于内部或外部因素(包括酒精、药物等),将注意力转向与驾驶主任务不相关的人或事物上,导致其驾驶的车辆与其他人或物产生碰撞的事故。
2.2 事故来源与筛选原则
本文研究数据来自上海联合道路交通安全科学研究中心(SHUFO)交通事故深度调查数据库中2013~2020年间的1 376例交通事故案例,事故采集地为上海市,该区域包含了所有城市典型道路类型。剔除缺少关键资料(如视频等)导致无法完成事故再现的案例,再依据分心驾驶事故定义进行筛选。筛选原则如下:
a.在警方资料(道路交通事故认定书和询问笔录等)中,存在“驾驶人疏忽”等类似信息;
b.如果事故参与方多于2个,仅记录分析首次碰撞的参与方信息;
c.将存在分心驾驶情况的驾驶人所在车辆定义为主车,如果事故中的2个参与方驾驶人均存在分心驾驶情况,则将道路交通事故认定书中的主要责任车辆定义为主车。
筛选后得到分心驾驶事故375 例,占总样本量的34%,其中汽车与汽车碰撞事故100 例,汽车与两轮车/三轮车碰撞事故144例,汽车与行人碰撞事故53例,单车事故78例。
3 分心驾驶事故特征分析
3.1 特征参数的选取
在交通事故深度调查数据库中,一起乘用车与乘用车碰撞的事故调查涉及参数数量高达1 500个左右,包括环境、车损、人伤等多角度事故信息。本文根据场景的构建需求,将特征参数集中在道路环境、参与方速度和运动状态3个方面,并在参考现有国内外汽车测试评价标准和相关文献的基础上,对原始数据中的参数进行概括归纳,确定了场景中能够影响安全系统表现且可较完整反映交通环境概况的参数,并作为特征分析与聚类分析的基础参数,如表1所示。

表1 特征参数定义及值域
3.2 分心驾驶事故特征分析
在聚类分析过程中可能由于聚类簇的限制将部分占比较少的场景参数剔除,从而降低了场景的典型性和代表性。为了识别分心驾驶事故关键特征,使其作为核心场景提取的依据,基于筛选得到的375例分心事故案例,对比不同事故类型下的参数分布,分析其中的共性参数。由于不同类型的事故参与方碰撞速度存在较大差异,碰撞速度不在特征分析的考虑范围内。
由于道路环境相关参数的分布容易受到道路规划及地域气候的影响,故有必要调查事故环境情况,作为道路特征、天气、照明参数的主要对比依据。根据2015~2019年间中国道路交通事故统计年报[12-16]的统计结果:不同道路特征、天气、照明条件下的交通事故总量分布较为稳定,其中有近76%为路段事故,近24%为路口事故;晴天、阴天、雨天的事故总量占比分别近似为74%、14.5%、10%,其他天气的事故总量占比仅为1%左右;白天、夜晚有照明、夜晚无照明的事故总量占比分别近似为61%、23%、16%。样本特征分布与年报数据对比情况如表2所示。
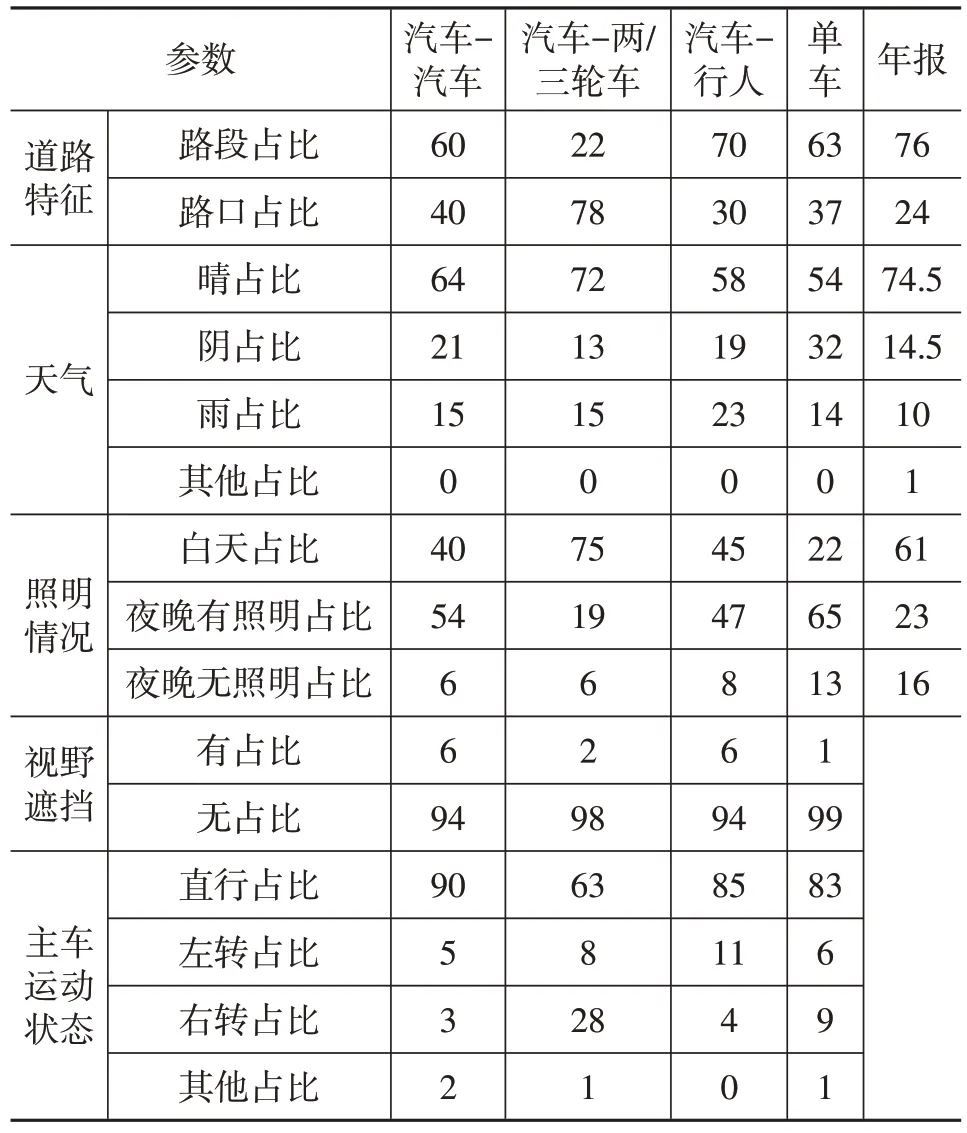
表2 特征分布情况 %
道路特征分布情况与年报的数据相比较可得:4类事故的路口事故总量占比均相对较高,路口道路在分心驾驶事故中更具有代表性,尤其是汽车与两轮车/三轮车碰撞事故。这反映了城市,尤其是大型城市的交通事故特点。因此本文将路口作为这4 类事故的关键特征参数。天气分布情况与年报数据相比较可知:两者具有一定的相似性,汽车与两轮车或三轮车、汽车与行人事故中雨天占比相对较高,故将雨天作为这2类事故的关键特征参数。汽车与汽车事故中阴天占比相对年报更高,结合不同的事故类型进行分析,阴天单车事故发生率相对其他事故类型也较高,高出年报统计量近22%,故将阴天作为这2 类事故的关键特征参数之一。照明分布情况与年报的数据相比较可得:汽车与汽车、汽车与行人、单车事故的照明分布情况与年报的统计结果截然不同,明显的差异在于夜晚有照明的事故占比高于其他2种照明情况,故将夜晚有照明作为这3类事故的关键特征参数。从不同的事故类型来看,汽车与两轮车/三轮车的碰撞事故中白天占比相比其他事故类型高出至少30%,并且较年报统计量高近14%,故将白天作为该类事故的关键特征参数。
各事故类型视野遮挡分布情况较为接近,无遮挡的占比超过93%,远高于有遮挡的事故占比,可见视野遮挡物虽然会对驾驶人视线产生干扰,但并不是导致分心驾驶的最直接原因,故将无视野遮挡作为各事故类型的关键特征参数。事故参与方类型为汽车与汽车、汽车与行人、单车的主车直行状态占比均高于80%,是最为常见的运动状态,故将直行作为这3类事故的关键特征参数。汽车与两轮车/三轮车碰撞事故中主车右转状态的占比远高于其他类型,故将主车右转作为该事故类型的关键特征参数。
根据以上特征分析结果,各事故类型的关键特征参数如表3所示,可以作为分心驾驶场景参数提取的主要依据。

表3 关键特征参数
4 分心驾驶事故场景研究
4.1 聚类算法
二阶聚类法(Two Step Cluster,TSC)是一种智能聚类算法,共分为2 个阶段。第1 个阶段为预聚类,应用基于分层的平衡迭代规约聚类(Balanced Iterative Reducing and Clustering using Hierarchies,BIRCH)算法中聚类特征(Clustering Feature,CF)树生长理论依次处理数据集中的数据点。BIRCH 算法是一种层次聚类算法,CF 树在依次处理数据点过程中不断添加、更新和分裂叶子节点形成诸多子簇[17]。第2 个阶段为聚类,在CF 树基础上采用对数似然距离进行度量,根据距离最小原则合并预处理的子簇,从而得到合适的聚类集合[18]。二阶聚类法与其他传统的聚类方法存在显著区别,其可自动确定最佳聚类数量,并可同时处理离散型数据和连续型数据的聚类问题。由于本文参数包含连续型数据(碰撞速度)和离散型数据(除碰撞速度以外的参数),故应用二阶算法进行聚类分析。
4.2 聚类结果
应用SPSS 软件,根据事故参与方类型的不同分别进行二阶聚类分析,得到汽车与汽车冲突的2 类结果、汽车与两轮车/三轮车冲突的4类结果、汽车与行人冲突的2类结果、单车冲突的3类结果,如表4所示。
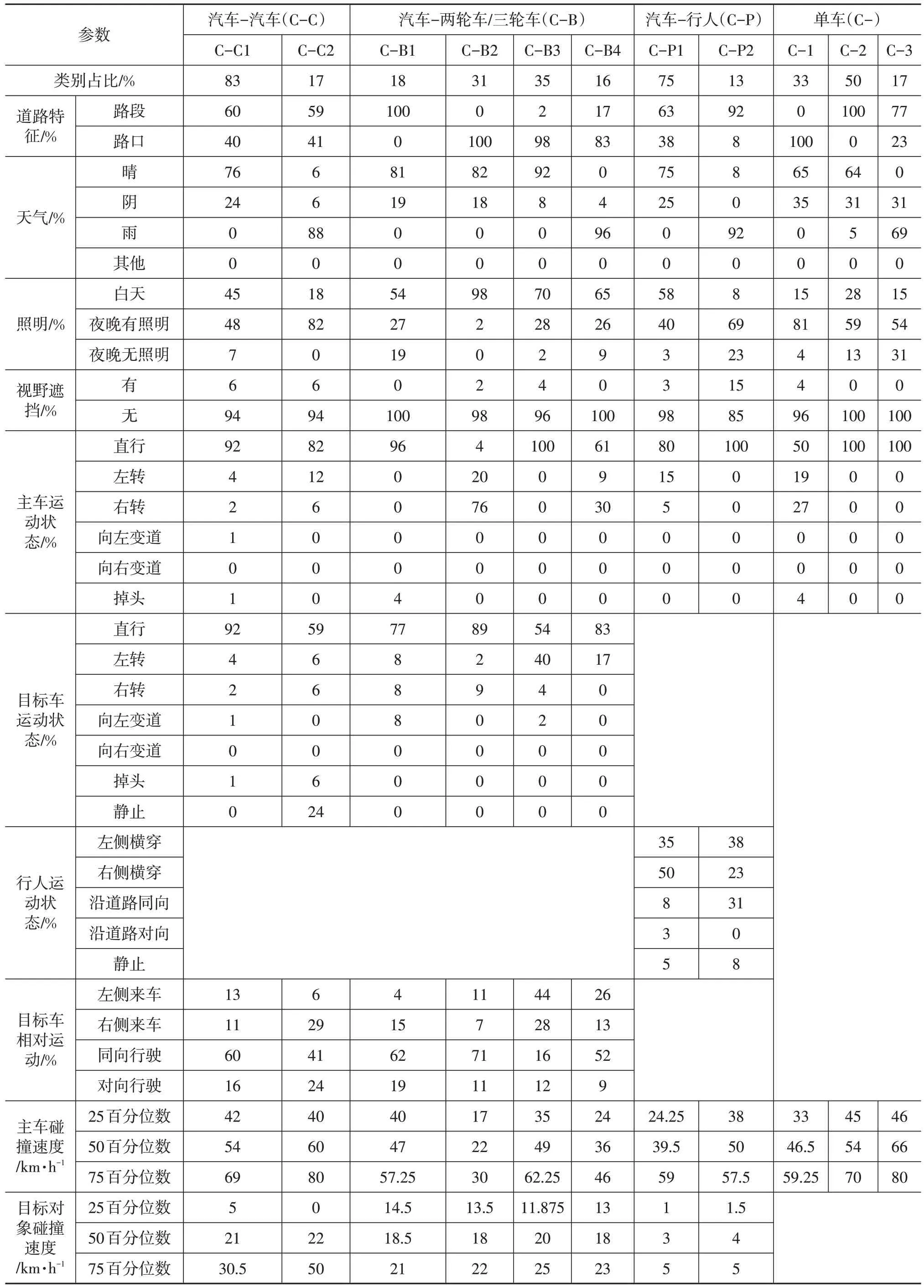
表4 聚类结果频数
4.3 典型场景提取
根据聚类分析参数分布情况,为突出场景的典型性,制定提取规则:对于离散型变量,选取同一参数下数量最多的参数值;对于连续型变量,选取中位数(50百分位数)。由此可得到11 类分心驾驶事故典型场景。
针对汽车与汽车(C-C)事故类型,如图1所示,2类典型场景是在夜晚有环境照明的路段或路口,主车与目标车同向行驶发生追尾,主车的速度是目标车速度的近3倍。这是由于在分心驾驶状态下,主车驾驶人易忽视或不重视跟车风险,造成追尾事故。
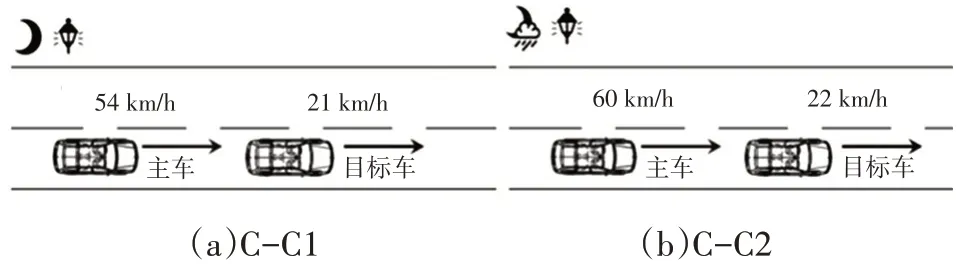
图1 C-C典型场景示意
针对汽车与两轮车/三轮车(C-B)事故类型,如图2所示,其中C-B1 和C-B4 场景均为主车与两轮车/三轮车在白天发生直行追尾事故,区别在于C-B1是在晴天条件下的路段,主车车速较快,而C-B4场景是在雨天条件下的路口。C-B2 场景是白天、晴天条件下右转主车与直行的两轮车/三轮车发生同向刮擦事故。C-B3 场景是在白天、晴天条件下直行主车与右侧道路驶来的直行两轮车/三轮车发生事故。其中C-B2和C-B3场景占比较高,分别为31%和35%,是该类事故中主车驾驶人分心的典型场景。汽车与两轮车/三轮车碰撞的分心驾驶事故中78.47%发生在路口,原因在于汽车驾驶人容易被复杂多变的路口交通环境影响,导致注意力分散,不能及时规避视野盲区驶出的两轮车/三轮车,造成交通事故。
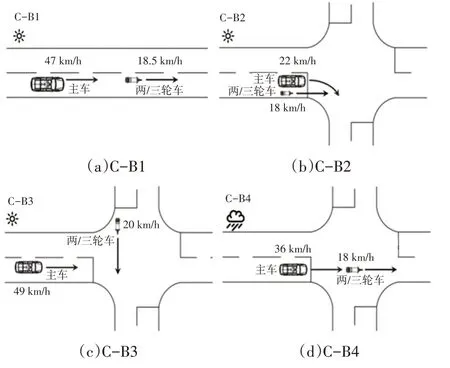
图2 C-B典型场景示意
针对汽车与行人(C-P)事故类型,如图3 所示,CP1 场景是白天、晴天条件下直行主车与从右侧横穿马路的行人发生事故。C-P2 场景是在雨天、夜间有照明条件下直行主车与从左侧横穿马路的行人发生事故。其中,C-P1场景的事故数量占比(75%)远大于C-P2场景事故数量占比(25%)。这是由于中国道路通行规则是靠右侧行驶,行人从右侧横穿马路时离车辆更近,在驾驶人分心状态下更容易发生事故。
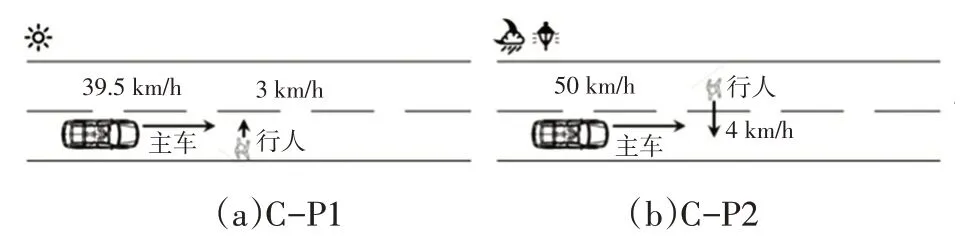
图3 C-P典型场景示意
针对单车(C-)事故类型,如图4所示,3类场景均发生在夜晚,直行主车与道路设施或障碍物等产生冲突。通过分析事故调查资料,发现大部分夜间行驶单车事故中,驾驶人在碰撞前都未及时采取制动或转向操作,且其中51%的事故是由酒后驾驶引起的。
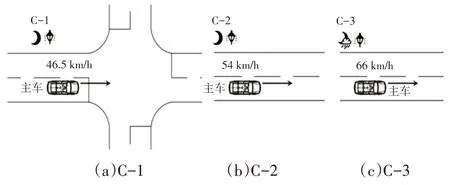
图4 C-典型场景示意
4.4 核心场景提取
在典型场景提取的基础上,根据特征分析中确定的关键特征参数,对典型场景中相应的特征参数进行调整,并对部分速度参数进行优化,得到核心场景,如图5所示。
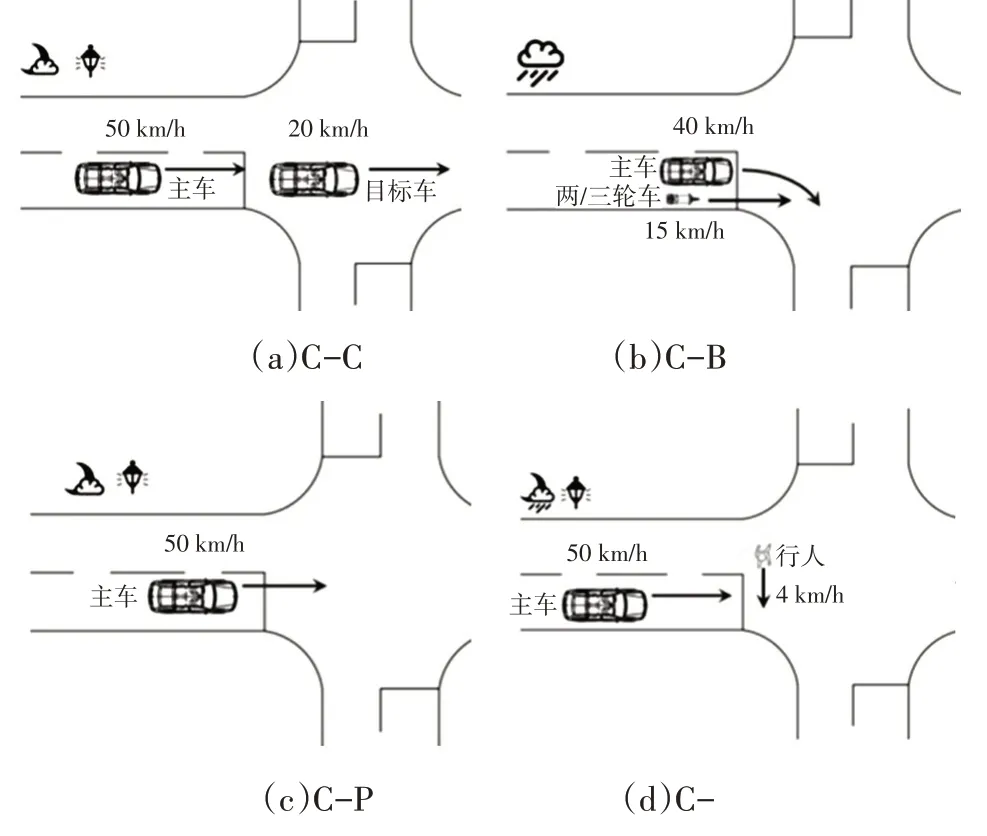
图5 核心场景示意
对于汽车与汽车事故类型,2 类典型场景的道路特征均为路段且不包含阴天,未体现关键道路特征和天气特征。聚类结果中C-C1 场景路口占比(40%)与C-C2 场景(41%)相似,但前者阴天的占比(24%)相对后者(6%)更高,故调整C-C1 场景的道路特征、天气参数,得到汽车与汽车事故类型核心场景,如图5a 所示。
对于汽车与两轮车/三轮车事故类型,虽然C-B2场景除天气因素外均与关键特征参数相符,但聚类结果中并不包含雨天事故。C-B4 场景中仅主车运动状态参数与关键特征参数不符,且聚类结果中包含主车右转事故(30%),故调整C-B4 场景的主车运动状态,得到汽车与两轮车/三轮车冲突的核心场景,如图5b所示。
对于汽车与行人事故类型,2类典型场景中均未体现关键道路特征:C-P1 场景所对应的聚类结果中不包含雨天事故,与关键特征参数不符;C-P2场景与关键特征参数的差异仅在于道路,且聚类结果中存在路口事故(8%)。故调整C-P2场景的道路特征,得到汽车与行人冲突的核心场景,如图5c所示。
对于单车冲突事故类型,C-1场景参数与关键特征参数仅在天气上存在差异,且聚类结果中包含阴天事故(35%),故调整C-1 场景的天气特征,得到单车冲突的核心场景,如图5d所示。
5 结束语
为构建分心驾驶事故场景,本文基于375例分心驾驶真实事故案例,结合事故特征分析与二阶聚类分析方法得到11类中国真实交通环境下的分心驾驶事故典型场景。其中包括2 类汽车与汽车冲突场景、4 类汽车与两轮车和三轮车冲突场景、2类汽车与行人冲突场景和3 类单车冲突场景,并在此基础上得到4种分心驾驶事故核心场景。由于样本数据中缺乏较可靠的驾驶人姿态资料,后续将进一步通过试验仿真平台开展更有针对性的分心驾驶研究,形成更加完整的测试场景评价体系。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:00
小星星·阅读100分(低年级)(2021年12期)2021-10-15 10:44:09
装备制造技术(2021年4期)2021-08-05 07:39:54
作文成功之路·小学版(2020年1期)2020-03-03 13:38:26
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:40
时代汽车(2018年4期)2018-05-31 02:53:08
山东青年(2017年7期)2018-01-11 16:09:15
制造技术与机床(2017年11期)2017-12-18 06:46:39
电测与仪表(2015年7期)2015-04-09 11:40:04