科研智能化视域下融合智能机器人的知识服务研究
2023-06-23 13:28:57李立睿张嘉程张博睿
图书与情报 2023年2期
李立睿 张嘉程 张博睿
摘 要:科研智能化不断推动科学研究范式的转型与升级,融合智能机器人的知识服务为支持新时代国家科技创新服务高质量发展提供了重要基础。文章运用文献研究、案例分析等方法,剖析科研智能化發展及其推动融合智能机器人知识服务的形成,同时探究科研智能化视域下融合智能机器人的知识服务内涵过程和典型模式。可以从数据资源的机器表征与关联融合、人智协同的服务保障与协调机制、科研用户的隐私安全与伦理风险、知识计算的过程优化与效率提升等方面,促进适应科研智能化的融合智能机器人的知识服务高质量发展。
关键词:科研范式;科研智能化;智能科学家;智能机器人;知识服务
中图分类号:TP242.6 文献标识码:A DOI:10.11968/tsyqb.1003-6938.2023023
Abstract Scientific research intellectualization is continuously promoting the transformation and upgrading of the scientific research paradigm. The knowledge service by integrating smart robots has emerged as a promising foundation for supporting the high-quality development of national science and technology innovation in the new era. By employing literature research and case analysis, this study analyzes the development of scientific research intellectualization and its contribution to the formation of knowledge service by smart robot. Additionally, it explores the connotation process and typical pattern of knowledge service by integrating smart robot from the perspective of scientific research intellectualization. The suggests are concluded, including improving the machine representation and correlation fusion of data resources, establishing service guaranteeing and coordination mechanisms of human-AI collaboration, addressing privacy and security concerns, and optimizing the process and calculation efficiency in knowledge computation, which can promote high-quality development and enhance the effectiveness of scientific research.
Key words scientific research paradigm; scientific research intellectualization; AI scientist; smart robot; knowledge service
近年来,大数据、人工智能、云计算等新兴数智技术的创新发展与转化应用,促使科学创新过程中的数据获取、信息分析、知识发现等一系列研究流程朝着智能化方向转变,极大提升了科研人员的探索与创新能力,加快了大规模知识集的自动化发现与生产,并持续引领着科研智能化的范式变革。如生物学领域的机器人科学家(Robot Scientist)“Adam”[1]和“Eve”[2]、化学领域的“可移动机器人化学家”[3]、医学领域的“Alpha Fold”[4]以及物理学领域的“AI Physicist”[5]等,这些智能机器人通过与人类科学家有机协作,有效承担了问题探索、科学实验、数据分析等纷繁复杂的重点研发任务,逐渐形成了一种科研智能化的新生态。因此,如何利用数智技术推动科研创新与变革,构建面向科研智能化的新型知识服务范式,是当前科技情报服务机构面临的关键难题。本文对科研智能化视域下融合智能机器人的嵌入式知识服务进行系统性探究,以期为人工智能与知识服务的有机融合与协同发展提供参考依据。
1 科研智能化
科研智能化作为数智化赋能科学研究的新型模式,正推动着科学研究的转型与升级。2000年,英国政府首次提出E-science(即科学研究信息化)计划,旨在通过利用高性能网络实现跨时空、跨学科的资源共享与协同工作的科研环境[6]。2007年,美国图灵奖得主Jim Gray根据科学研究的发展规律,提出了实验范式、理论范式、仿真模拟范式和数据密集型科学研究范式的演进路径[7]。2018年,中国科学院院士鄂维南率先提出了AI for Science(即人工智能驱动的科学研究)的概念,旨在将人工智能技术与不同领域的科学研究进行深度融合,进一步推动科学研究范式的变革,这极大促进了科研智能化的发展[8,9]。由此可见,科研智能化是充分利用大数据、人工智能等新兴数智技术的高通量性、自适应性、自学习性等显著优势,并将其应用于科学研究活动中,以此加速科研创新效率并引领科学发现的智能化过程[10-11]。
当前,科研智能化并未形成明确统一的定义。通过对现有研究进行系统梳理,可以发现,科研智能化是对运用人工智能及其技术产品(如智能推荐系统、自动化实验机器人、智能科学家等)参与或主导的科学研究发现的一种统称。如智能科学家等可以参与科学研究过程,并以协助或自主的方式进行构建科学假设、验证实验结果、实现知识发现等一系列科学活动,现已在物理、生物、化学、材料等领域得到了推广和应用[12-13]。具体而言,在生物领域,机器人科学家(Robot Scientist)“Adam”在2004年问世,其通过与生物科学家合作,成功完成酵母酶基因的编辑科学实验,因具有显著的科学实验操作与科学知识发现能力,成为首个实现科学发现的人工智能机器人[1]。之后,研究团队又致力于智能机器人科学家“Eve”的研究,以此用于协助科研人员对新药的研发,充分体现了AI赋能科研创新效率的极大优势[2]。由此可见,智能机器人具有机械智能、分析智能、情感智能等多重智能优势,可以与科学研究深度融合,以此推动科研流程自动化与知识发现智能化,逐渐成为智能科学家的典型应用模式。
2 科研智能化驱动融合智能机器人的知识服务形成
科研智能化是数智技术与科学研究协同发展与深度融合的必然结果,它不仅有效发挥了人智协同创新的突出优势,而且加速了科研范式的变革升级,重塑了面向创新科研活动的知识服务新生态。而智能机器人是通过借助计算机程序、人工智能算法、传感器等综合性技术,能够执行特定任务的自主性智能体,具有自治性、可控性、拟人性、可编程性等典型特征[14]。因此,智能机器人作为科研智能化的核心要素,将其与知识服务新生态有机融合,能为知识服务的智慧化转型与高质量发展赋能,提供更优质的科学解决方案。
(1)科研智能化为融合智能机器人的知识服务奠定技术支撑。科研智能化范式的持续演进,为构建以大科学为形态的科研创新模式提供了智能化科研环境与技术支撑平台。具体而言,科研智能化以自动化科技基础共享平台、科学数据开放平台、大型科学设施仪器装备平台等为基础,为融合智能机器人的知识服务过程中的智能识别与融合、智能分析与发现、智能治理与决策等创新技术的开发应用提供了有力保障[15]。
(2)科研智能化为融合智能机器人的知识服务提供资源保障。科研智能化正推动着科学研究向数据智能化、知识自动化、智慧涌现化等新阶段逐步演变[16]。同时,数据、知识与智慧作为融合智能机器人知识服务的重要资源基础,也极大促进了面向科研智能化的新型知识服务模式的形成、演变与迭代。更进一步,科研智能化促进了跨学科、跨领域的科研用户群体能够基于大规模数据、知识和智慧来思考、设计、实施科学研究过程,而这同时为支持融合智能机器人的知识服务过程中数据、知识和智慧的集聚、关联与融合提供了充分资源保障。
(3)科研智能化为融合智能机器人的知识服务创设服务场景。跨领域的交叉融合以及日益激烈的科技竞争,促使复杂性、系统性、工程性等重大科学问题层出不穷,融入智能机器人以支撑科研智能化过程中复杂难题的攻关,已成為科技创新的重要方式和有效途径。因此,科研智能化为新一代知识服务模式创设了更加复杂、多元、智能的服务场景。与此同时,随着人本人工智能、人因工程学等迅猛发展,利用以智能机器人为典型代表的人智融合模式来协同创设面向复杂科学问题的知识服务场景,已成为新一代知识服务领域的重要发展趋势[17]。
3 科研智能化视域下融合智能机器人的知识服务内涵过程
融合智能机器人的知识服务作为一种人智混合增强的协同服务模式,通过将人机协同的理念和方式引入到高阶化和密集型知识服务流程中,以此提升智能化、专业化和个性化的知识服务质量。因此,融合智能机器人的知识服务既强调施展服务人员的专业特长、知识技能、关系管理等常规化服务能力,又注重在服务全过程中充分发挥智能机器人的需求感知、智能计算、多维交互、智慧学习等多元显著智慧优势,从而服务于那些拥有重大创新研究项目、跨机构联合攻关课题、前沿交叉研究问题的科研用户需求[11]。
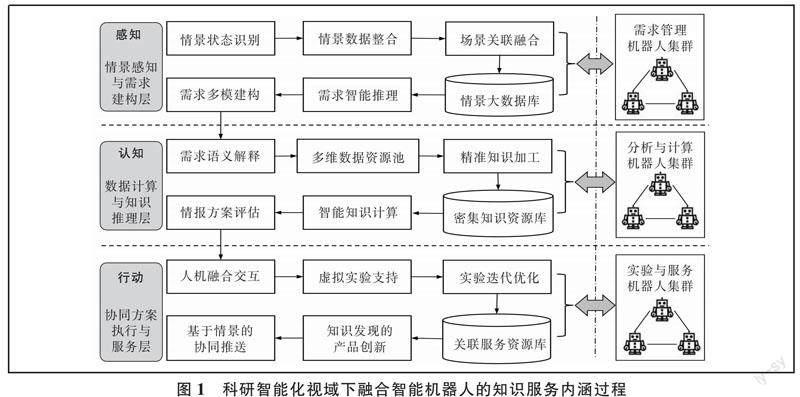
融合智能机器人的知识服务主要包括感知(即情景感知与需求建构层)、认知(数据计算与知识推理层)和行动(即协同方案执行与服务层)构成,通过将需求管理机器人集群、分析与计算机器人集群和实验与服务机器人集群嵌入到科研过程的全生命周期之中,实现面向科研智能化的人智共融式知识服务(见图2)。
(1)情景感知与需求建构层。该层主要包含情景状态识别、情景数据整合、场景关联融合、情景大数据库、需求智能推理以及需求多模建构六个阶段[18]。服务团队利用智能机器人集群进行多维感知,并获取科研用户情景状态,同时,对应的智能情景代理被触发,通过对科研用户的情景数据与历史服务场景进行关联融合,进一步生成情景大数据库,据此实现用户需求智能描述与预测。首先,前端交互类智能机器人通过采用多维互动的形式,对科研用户的个人信息、兴趣偏好、学术文档、行为信息等进行全方位捕捉与画像,厘清科研用户现有研究进展和学术交互关系;然后,情景分析类智能机器人将上述情景数据进行系统整合,并结合前沿热点、应用动态、合作网络等挖掘科研用户的长短期动态需求,逐步构建面向多学科、多领域的科研用户群的情景大数据库;最后,需求管理类智能机器人借助需求智能代理,将科研用户当前的不同类别需求进行整理、排序,并构建需求地图,实现多维度、多模态的需求精准刻画。
(2)数据计算与知识推理层。该层主要包括需求语义解释、多维数据资源池、精准知识加工、密集知识资源库、智能知识计算以及情报方案评估六个阶段。智能机器人通过需求语义解释技术将底层的需求模型转化成高层的语义表示。一方面,以科研用户的研究任务为导向,借助智能机器人的数据融合智能引擎,构建以文献数据、科学数据和实验数据等为主体的多维数据资源池[10];另一方面,利用智能机器人的数据筛选与集成技术、科技文献知识抽取技术、自迭代智能学习技术等对不同类别数据资源池进行数据流转与知识加工,以此构建密集知识资源库。基于此,服务团队通过与科研用户进行交互,从而对研究假设进行调整、修正和改进,以此形成相应的科学问题假设计算空间。最后,智能机器人通过以密集知识资源库为基础,进一步选择相应的实验条件、计算方法、验证路径等科研要素,实现知识的智能化计算,并对相应的情报方案进行智能评估。
(3)协同方案执行与服务层。该层主要包括人机融合交互、虚拟实验支持、实验迭代优化、关联服务资源库、知识发现与产品创新以及基于情景的协同推送六个阶段。具体而言,服务团队、科研用户与智能机器人通过以人机融合交互(如对话协商、智能适应、场景模拟等),运用自动化技术、数字孪生技术、物联网技术等将目标实验过程转化成智能机器人可执行的虚拟实验方案,借助智能机器人传感器或机械手臂实现(虚拟)实验方案的自动化执行。在这一过程中,智能机器人不仅可以对(虚拟)实验假设分析与验证进行系统记录,而且还能结合科研用户需求对(虚拟)实验结论进行阶段性总结、整理和归纳,进而实现(虚拟)实验过程的可视化回溯,极大促进(虚拟)实验过程进行迭代和优化[19]。更进一步,服务团队还可以对(虚拟)实验过程中的服务内容、关联资源、核心模型等进行抽取、融合与组织,构建关键服务资源库,以嵌入、协同的方式实现科研活动知识发现和服务产品的优化,进而提升科研创新效率。
不难发现,根据不同服务目标,对应的智能机器人种类亦具有相应差异,通常包括:①以情景智能感知、分析和处理的交互咨询类智能机器人;②以数据分析、知识管理为主的分析计算类智能机器人;③以实验操作、分析和管理为主的可移动实验类智能机器人;④以服务产品分析、推送、反馈为主的服务管理类智能机器人。与此同时,这对于知识服务团队也提出了新的要求,不仅需要特定学科领域的情报或学科专家,还需要同时具备良好的有关智能机器人的人智协同管理能力以及数据知识化处理能力的知识建构师。
4 科研智能化视域下融合智能机器人的知识服务典型模式
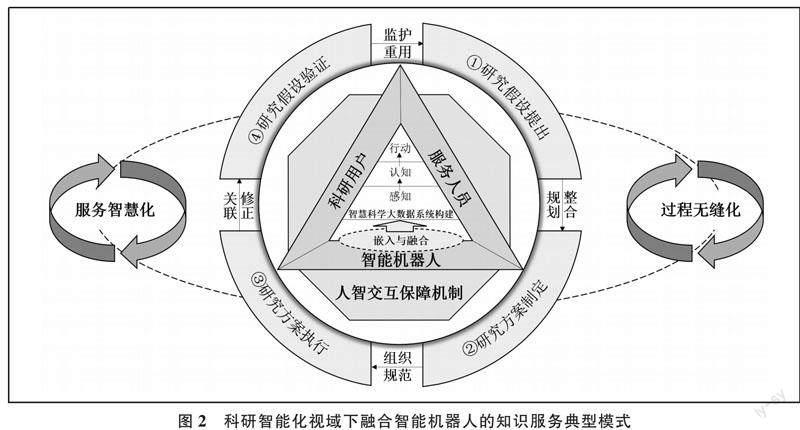
科研智能化视域下融合智能机器人的知识服务,其本质是以科研项目的生命周期为视角,通过充分发挥智能机器人、服務团队与科研用户三位一体的人智协同优势,对科学研究展开全流程系统化管理,以此提升科研项目治理效能与科技研发创新效率,具有服务智慧化和过程无缝化的双重特点。基于此,科研智能化视域下融合智能机器人的知识服务典型模式是一种围绕科研项目生命周期,以人智融合子系统为基础,并依托协同服务子系统来协同实现科研智能化的智慧服务模式(见图2)。
4.1 人智融合子系统
人智融合子系统是以嵌入与融合为服务路径,以知识发现与创新为目标,构建基于“感知→认知→行动”的智慧科学大数据系统,并依托人智交互保障机制,以此为协同服务子系统的有效运转提供支撑。
(1)嵌入与融合。一方面,由服务人员与智能机器人集群所组成的知识服务团队,以物理嵌入、虚拟嵌入、关系嵌入等方式实现研究过程的嵌入;另一方面,通过发挥知识服务团队的专业优势,结合科研用户研究条件、进展、目标和基础,实现针对特定学科领域的协同数据感知、协同关系增强和人智能力共融。
(2)基于“感知→认知→行动”的智慧科学大数据系统构建。该阶段是以前述嵌入与融合为基础,充分发挥融合智能机器人知识服务团队的“感知→认知→行动”一体化优势,实现智慧科学大数据系统的多层次构建,其中涵盖了由原始化科学数据智慧化、派生化科学数据智慧化和结果化科学数据智慧化所构成的智慧科学大数据系统。
(3)人智交互保障机制。科研用户需求的动态性、科研创新目标的探索性、科研过程方案的迭代性等特点,均直接导致了融合智能机器人的知识服务团队与科研用户在交互过程中,会呈现出人智协作、人智竞争、甚至人智冲突等状态[20]。因此,人智交互保障机制是由服务团队、科研用户、科研机构等联合制定的服务伦理与规范制度,以此有效保障在“感知→认知→行动”一体化知识服务过程中,所涉及的科研用户隐私安全、智慧数据系统可靠、科研互动体验可控等问题。
4.2 协同服务子系统
协同服务子系统包括研究假设提出、研究方案制定、研究方案执行以及研究假设检验四个流程阶段,并据此提供相应服务。
(1)从研究假设提出到研究方案制定:规划与整合。这一阶段涵盖了科研用户围绕重大或重点科学问题而提出关键性假设,并借助现有的研究基础、研发能力或核心优势,进行研究方案的规划和整合过程。融合智能机器人的知识服务团队以研究需求为导向,对数据资源、智能资源、关系资源等进行全面整合,同时对研究进展现状进行全面分析,并通过智能计算、情境模拟、系统仿真等方式参与科研用户的假设论证,为研究假设的提出与研究方案设计提供深度参考咨询服务支持。如在材料学领域,知识服务团队通过与科研用户进行协同联合,利用智能机器人整合了高通量实验与计算的“数据工厂”与数据设施,为材料基因工程的规划与整合奠定了重要基础[21]。
(2)从研究方案制定到研究方案执行:组织与规范。这一阶段是融合智能机器人的知识服务团队以前期确立的研究方案为基础,为确保方案顺利执行而采取的组织与规范的服务过程。知识服务团队通过联合科技情报服务机构、智库服务联盟组织等,对研究方案的数据资源组织、知识结构组织、技术储备组织等方面进行整体性把控,确保方案在执行过程中的一致性和有效性。与此同时,通过发挥智能机器人集群的“感知→认知→行为”框架,对研究方案执行过程进行一致性标注、偏差化监控和全面化规范。如麻省理工学院Kebotix实验室联合由计算机专家、知识建构专家、数据科学家等跨领域服务团队,通过利用智能机器人辅助开展新型化合物研制实验方案的制定、实验与检测,并对极端条件中方案稳健性进行流程重组与标准规范[22]。
(3)从研究方案执行到研究假设验证:关联与修正。该阶段是科研用户在充分执行既定研究方案之后,关于实际研究结果与预期假设目标的对比、校正与检验的过程。融合智能机器人的知识服务团队立足于智慧化科学大数据的物理或虚拟实验自动化过程,如蛋白质结构检验、DNA序列测度、空间图像识别等,构建知识计算空间并自动生成关联性假设空间,通过采取多轮迭代,从中匹配支持科研用户的假设模型,为研究方案的关联与修正提供决策支持。如中国科学院在生物医学领域,通过开发微纳米机器人,开展生理环境下对微组织、细胞以及蛋白分子进行操控,并通过人工神经网络技术对研究假设进行智能学习与关联优化,以此加速新药的研发进程[23]。
(4)从研究假设验证到研究假设提出:监护与重用。该阶段是融合智能机器人的知识服务团队与科研用户根据前期整体研究全周期反思,结合前沿应用、问题瓶颈、未来发展等,再次提出创新性研究假设的过程。由数据馆员、数据科学家、数据经理等构成的知识服务团队通过与科研用户深度沟通,发挥智能机器人的数据监护优势,对前期研究过程中的原始数据、派生数据、结果数据及其相关元数据等进行系统性标识和一体化归类,并形成智能机器人可读的全域科学大数据知识库,并确立相应的数据引用、验证与保护机制,为后期科研用户提出研究假设、构建研究方案提供支撑。如材料探索与优化闭环自主机器人,对实验数据进行一致性监护,并根据改进假设,确定相应的最佳实验,以迭代反馈的方式实现实验数据的重用,以此促进最优材料的发现[24]。
5 亟需注意和解决的问题
5.1 数据资源的机器表征与关联融合
数据资源已成为推动科研创新的关键要素。以跨学科、跨领域、跨时空为典型特征的大科学研究创新中,对于多源、异构、高维、海量的数据资源表征、配置与融合已经成为加速知识发现与创新的重要支撑。因此,如何实现以机器智能可读和可计算性为目标,对数据资源的机器化、标准化表征的数据加工技术提出了挑战。更进一步,科学研究过程具有理论指导性、实践渐进性、螺旋上升性等显著特点,所涉及的数据资源不仅涵盖不同研究阶段的原始大数据、派生大数据和结果大数据集合,还包括不同研究阶段实时感知、动态获取、有序增补的各类异构大数据集合,这无疑对数据资源的机器表征与关联融合提出了严峻挑战。
鉴于此,融合智能机器人的知识服务团队可以从复杂生态系统视角,扩展多类别、多模态数据资源的预训练语言模型,强化数据资源的标准化加工建设,提升智能机器人关于数据的数值化可读性表征,以此构建无边界的数据资源空间。与此同时,融合智能机器人的知识服务团队通过以科研全流程周期为基础,充分发挥智能机器人的智能关联、智能融合、智能回溯等显著优势,为智能机器人的高通量智能计算和高效率知识发现提供关键支撑[25]。
5.2 人智协同的服务保障与协调机制
人智协同的交互理念充分体现了智能机器人与科研用户、服务人员等核心要素在一定规则制度下,通过一系列的有序交互和协作活动而实现共同目标的过程。从这一层面来看,完备的人智协同服务保障和协调机制是深入推动服务进程、提升服务质量的关键力量。一方面,以服务人员为主体的人类智能与智能机器人为主体的机器智能相互融通,对算法的公平性、可解释性进行实时控制与干预,能够有效保证服务人员的“人在回路”过程,以此提升人智协同智能增长点;另一方面,将智能机器人嵌入到科研全流程周期中,能够从感知、认知和行动来实现科研智能化与服务专深化。因此,在上述过程中,融合智能机器人的知识服务团队与科研用户之间,所涉及的协同式服务场景保障、冲突与竞争机制的协调等问题,会直接关系到整体体验质量与服务效果[26-27]。基于此,从服务生态系统视角来看,面向“服务人员■智能机器人■科研用户”多维耦合服务关系的场景创设、作业分工、责任区别等保障机制,以及蕴含其中的人智协同决策冲突与竞争的协调机制,对智慧知识服务的高质量发展至关重要。
5.3 科研用户的隐私安全与伦理风险
隐私安全与伦理风险始终是科研智能化环境中智能机器人支撑知识服务需解决的根本问题之一。一方面,智能机器人系统的高效运转离不开科研生态系统中多源、异构、海量化数据,这其中涵盖了大量的关于科研用户个体特征的隐私数据、科研用户研究状态的情境数据、科研用户研究过程的科学数据等,上述数据一旦在传输、使用、保护过程中出现纰漏,极大可能触发科研用户的隐私泄露风险[28];另一方面,智能机器人所采用的智能算法技术(如深度学习、自然语言处理、计算机视觉等)作为一种大数据驱动的概率统计方法论,具有较为明显的数据依赖或组件依赖特征,如若在现实复杂环境应用过程中操作不当,将直接导致相关联的安全漏洞或劫持风险。值得指出的是,智能机器人的机器学习性能优化多是借助计算模型的复杂度来实现的,这在一定程度上导致智能机器人产生对科研用户的数据安全伦理偏见,同时算法的不透明性也会进一步加剧科研用户对于机器决策的可靠性和准确性担忧。
因此,智能机器人在从实验走进现实的服务进程中,可以通过采用科研用户与智能机器人的双向识别与交互技术,展现智能机器人的感知、计算、决策等过程的透明性和可解释性,同时,引入关于智能机器人的可扩展监督系统,强化科研用户隐私数据安全,以此增强科研用户的信任感。此外,服务人员可以联合科技伦理委员会,加强智能机器人研发过程中的社会责任感评估,突出技术与道德伦理层面的融合,进而构建以人为本的人智安全伦理体系[29-30]。
5.4 知识计算的过程优化与效率提升
科研智能化环境下,知识计算化已成为智能机器人实现科学假设开发与验证、科学实验执行与拓展、科学发现融合与应用的重要基础。然而,智能机器人的知识计算过程依赖于面向科学研究全流程的多模态的实验记录数据、多类型的传感检测数据、多种类的文献关联数据等科学大数据形态,具有典型的知识密集性、高度的专业前沿性、突出的学科交叉性等特点。与此同时,智能机器人的知识计算过程强调数据、算法和算力三位一体,尤其注重前沿知识的整合关联与深度挖掘,这对于围绕科学创新流程的数据融合、空间建模、流程重组等方面的过程优化提出了新的要求[31]。另外,智能机器人在支持科研智能化的过程中,构建了现实与虚拟实验室相结合的智能学术实验空间,通过采用数字孪生技术,实现了真实科学实验与虚拟科学实验之间的无缝融合,以此促进大規模知识计算。
为实现这一目标,服务人员需要开发新型的知识语言与操作程序,将资源、空间与服务进行一体化整合和自动化管理,在将知识计算模块嵌入到科研创新全流程的同时,对科学大数据资源、中间化知识内容、智能学术实验空间等进行有效串联,进而以机器学习的方式自建构科学假设,以大数据知识空间为基础,实现知识计算的自动化、规模化和有序化[32-33]。
*本文系重庆市教育科学规划重点项目“智能时代教师数智素养能力评价与提升路径研究”(项目编号:2021-GX-004)、重庆市社会科学规划项目“重庆民族地区非物质文化遗产的数字资源整合与教育传承研究”(项目编号:2022NDQN55)、国家自然科学基金项目“移动学术社区科研用户微知识持续协作行为及协同创新机制研究”(项目编号:71804153)与中央高校基本科研业务费专项资金资助项目“数智时代学习者与智能机器人协作学习质量评价及提升路径研究”(项目编号:SWU2209212)研究成果之一。
参考文献:
[1] King R D,Rowland J,Aubrey W,et al.The robot scientist Adam[J].Computer,2009,42(8):46-54.
[2] Williams K,Bilsland E,Sparkes A,et al.Cheaper faster drug development validated by the repositioning of drugs against neglected tropical diseases[J].Journal of the Royal society Interface,2015,12(104):20141289.
[3] Burger B,Maffettone P M,Gusev V V,et al.A mobile robotic chemist[J].Nature,2020,583(7815):237-241.
[4] Evans R,Jumper J,Kirkpatrick J,et al.De novo structure prediction with deep learning based scoring[J].Annu Rev Biochem,2018,77(363-382):6.
[5] Tang X,Wang B,Rong Y.Artificial intelligence will reduce the need for clinical medical physicists[J].Journal of applied clinical medical physics,2018,19(1):6.
[6] Jankowski N W.Exploring e-Science:An introduction[J].Journal of Computer-Mediated Communication,2010(2):2.
[7] Hey T,Tansley S,Tolle K.潘教峰,张晓林,等,译.第四范式:数据密集型科学发现[M].北京:科学出版社,2012:177-215.
[8] 勒川.AI for Science:共创新未来——2022中关村论坛系列活动“科学智能峰会”举行[J].中关村,2022(9):40-41.
[9] 刘垠.AI撬动科研范式变革[N].科技日报,2023-03-28(1).
[10] 王飛跃.机器人的未来发展:从工业自动化到知识自动化[J].科技导报,2015,33(21):39-44.
[11] 罗威,罗准辰,雷帅,等.智能科学家——科技信息创新引领的下一代科研范式[J].情报理论与实践,2020,43(1):1-5,17.
[12] 孙蒙鸽,韩涛.科研智能化与知识服务:内涵、实现与机遇[J].情报理论与实践,2021,44(10):41-49.
[13] 孙蒙鸽,黄雨馨,韩涛,等.科研智能化新趋势下知识服务的挑战与机遇[J].情报杂志,2022,41(6):173-181,107.
[14] International Federation of Robotics.Definition of service robots[EB/OL].[2023-01-20].https://ifr.org/service-robots.
[15] 胡志刚,王欣,李海波.从商业智能到科研智能:智能化时代的科学学与科技管理[J].科学学与科学技术管理,2021,42(1):3-20.
[16] 王飞跃,张俊.智联网:概念、问题和平台[J].自动化学报,2017,43(12):2061-2070.
[17] Wang F Y,Guo J,Bu G,et al.Mutually trustworthy human-machine knowledge automation and hybrid augmented intelligence:mechanisms and applications of cognition,management,and control for complex systems[J].Frontiers of Information Technology & Electronic Engineering,2022,23(8):1142-1157.
[18] 邓仲华,李立睿,陆颖隽.基于科研用户情景感知的嵌入式知识服务研究(上)[J].情报理论与实践,2014,37(9):16-19,34.
[19] Porwol L,Kowalski D J,Henson A,et al.An autonomous chemical robot discovers the rules of inorganic coordination chemistry without prior knowledge[J].Angewandte Chemie,2020,132(28):11352-11357.
[20] 姜婷婷,许艳闰,傅诗婷,等.人智交互体验研究:为人本人工智能发展注入新动力[J].图书情报知识,2022,39(4):43-55.
[21] Hong Wang,X-D Xiang,Lanting Zhang.On the Data-Driven Materials Innovation Infrastructure[J].Engineering,2020,6(6):609-611.
[22] 中科院网信工作网.Kebotix公司利用人工智能和机器人技术测试新型化合物[EB/OL].[2023-01-05].http://www.ecas.cas.cn/xxkw/kbcd/201115_127129/ml/xxhcxyyyal/201811/t20181126_4545151.html.
[23] Li M,Xi N,Wang Y,et al.Progress in Nanorobotics for Advancing Biomedicine[J].IEEE Transactions on Biomedical Engineering,2021,68(1):130-147.
[24] Kusne A,Yu H,Wu C,et al.On-the-fly closed-loop autonomous materials discovery via bayesian active learning[J].arXiv:Materials Science,2020,11(1):1-11.
[25] 李立睿,鄧仲华.“互联网+”背景下科研用户的小数据融合研究[J].图书情报工作,2016,60(6):58-63.
[26] 曾点.人工智能能替代科学家吗?——再思STS的一场论战[J].哲学分析,2023,14(1):159-171,199.
[27] 李广建,罗立群.计算型情报分析的进展[J].中国图书馆学报,2019,45(4):29-43.
[28] 郑志峰.人工智能时代的隐私保护[J].法律科学(西北政法大学学报),2019,37(2):51-60.
[29] 王欣,张冬梅,闫凤云,等.大数据环境下基于科研用户小数据的图书馆个性化科研服务研究[J].情报理论与实践,2017,40(10):85-90,95.
[30] Rahwan I,Cebrian M,Obradovich N,et al.Machine behaviour[J].Nature,2019,568:477-486.
[31] 孙坦,刘峥,崔运鹏,等.融合知识组织与认知计算的新一代开放知识服务架构探析[J].中国图书馆学报,2019,45(3):38-48.
[32] 杨宁,文奕,张鑫,等.面向情报分析的普适知识计算平台研究与实现[J].情报理论与实践,2019,42(4):41-44,30.
[33] 王晓云,杨子煜.基于知识计算的精准服务研究[J].情报理论与实践,2019,42(6):62-64,41.
作者简介:李立睿,男,西南大学计算机与信息科学学院、西南大学教育学院副教授,博士生导师;张嘉程,男,西南大学计算机与信息科学学院硕士研究生;张博睿,男,中国科学院成都文献情报中心、中国科学院大学经济与管理学院信息资源管理系硕士研究生。
猜你喜欢
环球人文地理·评论版(2016年5期)2017-01-03 04:36:05
科技创新导报(2016年23期)2016-12-23 09:53:51
现代情报(2016年11期)2016-12-21 23:34:35
现代情报(2016年11期)2016-12-21 23:32:05
计算机教育(2016年10期)2016-12-19 21:06:03
科技创新与应用(2016年33期)2016-12-17 15:49:59
现代情报(2016年10期)2016-12-15 11:41:13
商情(2016年39期)2016-11-21 09:55:26
新世纪图书馆(2016年9期)2016-11-15 02:08:04
科教导刊·电子版(2016年24期)2016-10-29 21:22:09