基于机器视觉的山旱地智能化农业拔草装备研究
2023-06-21 05:00温生芳
南方农机 2023年13期
温生芳
(天祝县安远镇人民政府,甘肃 武威 733299)
1 机器视觉技术与深度学习算法简介
1.1 机器视觉技术概述
机器视觉技术是一种通过计算机和其他相关设备对目标图像进行采集、处理和分析的技术,可以实现对目标物体的识别、定位和测量等。该技术的核心在于将图像信息转化为计算机可以识别和处理的数据,进而实现对图像中的目标物体进行自动识别与分析[1]。机器视觉技术具有非接触性、高精度、快速响应等特点,广泛应用于工业自动化、医学图像分析、交通监控等领域。在农业领域,机器视觉技术可以用于作物种植、病虫害监测、果实分类等方面,提高农业生产效率,减轻农民劳动强度,并为农业现代化发展提供技术支持。
1.2 深度学习算法原理
深度学习是机器学习领域的一个子集,通过构建多层的神经网络模型来实现对数据的表征学习与抽象[2]。深度学习算法借鉴了生物神经网络的结构与功能,具备强大的数据处理和分析能力。其核心原理包括前向传播和反向传播,利用大量数据对模型进行训练与优化,使其能够自动学习数据中的复杂特征和关联。深度学习算法如卷积神经网络(CNN)、循环神经网络(RNN)和长短时记忆网络(LSTM)等,在图像识别、自然语言处理、语音识别等领域取得了显著的成果。在农业领域,深度学习算法可应用于病虫害识别、作物生长预测、农业机器人导航等方面,为农业智能化提供强大的技术支撑。
1.3 机器视觉技术与深度学习算法在农业中的应用
随着科技的进步,机器视觉技术与深度学习算法在农业领域的应用日益广泛。首先,在病虫害识别中,通过机器视觉采集作物图像,结合深度学习算法对病虫害进行准确识别,实现早期预警和防治[3]。其次,在农产品分类与质量检测方面,利用机器视觉获取农产品图像信息,采用深度学习模型对农产品的等级和质量进行自动评估。此外,在农业机器人导航与作业中,机器视觉技术可以帮助机器人获取环境信息,深度学习算法则为机器人提供智能决策和控制能力。例如,在智能拔草装备中,机器视觉技术用于识别杂草与作物,深度学习算法则实现精确识别与拔除。这些技术的应用都为农业生产带来了更高效、智能化的解决方案,提高了农业生产效率。
2 杂草识别模型构建
2.1 数据采集与预处理
在数据采集与预处理阶段,首先通过搭建适当的图像采集设备,如无人机、高清摄像头等,对山旱地农田进行实地拍摄,获取包含作物与杂草的原始图像数据[4]。采集过程中要保证图像质量、清晰度和多样性。随后,对采集到的图像进行预处理,包括去除噪声、裁剪、调整大小等操作,以消除不同图像间的差异,提高数据的一致性。预处理完成后,对图像进行标注,区分作物与杂草,为后续的机器视觉识别和深度学习算法训练提供准确的数据基础。
2.2 作物与杂草形态特征分析
1)叶形特征:观察作物与杂草叶子的形状,如叶片大小、边缘纹理、叶脉结构等。这些特征在作物与杂草之间通常具有较大差异。
2)颜色特征:分析作物与杂草在颜色上的差异。作物叶片可能呈现出较为鲜艳的绿色,而杂草的颜色可能略显暗淡或不规律。
3)生长习性:观察作物与杂草在生长过程中的空间分布和生长方向。作物通常呈现出规律的排列和生长方向,而杂草可能分布较为散乱。
通过对比这些形态特征,可以在图像中分析并区分作物与杂草。这些特征可用于指导机器视觉识别和深度学习算法的训练与优化[5]。
2.3 杂草识别模型建立
为了实现作物和杂草之间的自动识别,本研究首先建立了一个基于深度学习算法的杂草识别模型。在这个过程中,研究小组采用了以下步骤。
2.3.1 数据集构建
首先,需要收集大量山旱地农田的作物和杂草图像,对图像进行清晰度筛选、剪裁和标注。其次,为了训练模型更好地识别作物和杂草,需要确保数据集具有多样性,包括不同种类的作物、不同生长阶段的杂草以及不同光照条件下的图像。
2.3.2 数据预处理
对数据集进行预处理,包括图像缩放、归一化、数据增强等。图像缩放可以确保输入到模型中的图像具有相同的尺寸;归一化有助于减少光照和颜色差异对模型训练的影响;数据增强通过对原始图像进行翻转、旋转等操作,增加了数据集的多样性,从而提高了模型的泛化能力。
2.3.3 模型选择与训练
选择卷积神经网络(CNN)作为杂草识别模型的基本结构,它在图像识别任务中表现出了优越的性能。本研究尝试了多种网络架构,并根据实验结果选择了一个具有较高准确性和较低计算成本的模型。在训练过程中,本研究使用了随机梯度下降(SGD)优化器和交叉熵损失函数来优化模型参数。
2.3.4 模型验证与优化
为了评估模型的性能,本研究将数据集划分为训练集和验证集。在每个训练周期后,使用验证集评估模型的准确性。通过观察训练损失和验证损失的变化,可以判断模型是否出现过拟合或欠拟合,并相应地调整模型结构或训练策略。在优化过程中,本研究还尝试了一些技巧,如学习率衰减、权重正则化等,以提高模型的性能。
经过上述步骤,本研究成功建立了一个高效的杂草识别模型,该模型能够在山旱地农田环境中准确地区分作物和杂草。在后续实验中,该模型将与拔草装备的机械臂和控制系统相结合,实现自动化杂草识别和拔除。
2.3.5 模型集成与拔草装备整合
为了将所建立的杂草识别模型应用于实际的拔草装备,需要将模型与机械臂和控制系统集成。首先,将训练好的模型部署到拔草装备的嵌入式处理器中,以便在现场实时处理图像数据。接下来,设计并实现了一个与模型输出结果相匹配的控制系统,将杂草识别的结果转化为机械臂的运动指令。
通过对机械臂的运动路径和速度进行优化,本研究确保了拔草装备在识别和拔除杂草的过程中具有较高的效率和准确性。此外,为了应对山旱地农田复杂的地形和环境条件,本研究还对拔草装备的机械结构进行了适应性设计,使其能够在不同场景中稳定、可靠地工作。
综上所述,通过将杂草识别模型与拔草装备的机械臂和控制系统相结合,本研究成功地实现了山旱地农田环境中杂草的自动识别和拔除,为提高山旱地农业生产效率和降低生产成本提供了有力支持。
3 深度学习算法在杂草识别中的应用
3.1 算法选择与优化
为了实现杂草与作物的精确识别,本研究首先需要选择一个合适的深度学习算法。经过对比分析,本研究选择了卷积神经网络(CNN)作为基础算法,基于卷积神经网络(CNN)的模型优化的示例图表如表1 所示。
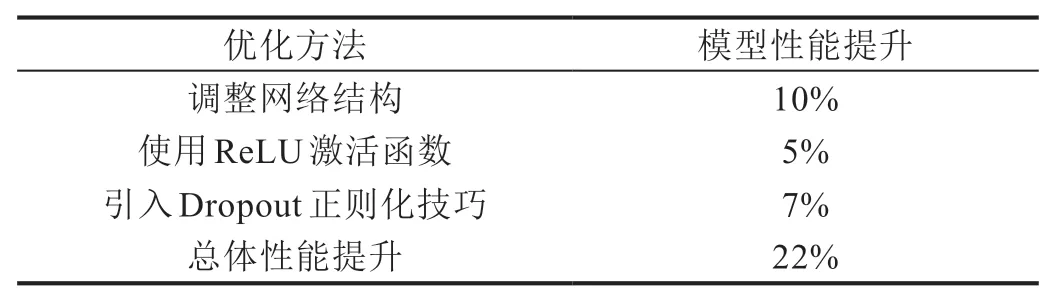
表1 基于卷积神经网络(CNN)的模型优化的示例图表
从表中可以看出,基于卷积神经网络(CNN)的模型经过调整优化之后,性能有了明显提升。其中,通过调整网络结构,模型的性能提升了10%;使用ReLU 激活函数和引入Dropout 正则化技巧也分别带来了5%和7%的性能提升。综合考虑,模型的总体性能提升了22%。
3.2 模型训练与验证
在选择并优化了算法之后,本研究开始训练模型。首先,将采集的图像数据划分为训练集和验证集。训练集用于训练模型,而验证集用于在训练过程中评估模型性能。在训练过程中,本研究采用了数据增强技术,以生成更多的样本并提高模型的鲁棒性。此外,本研究还使用了学习率调整策略和早停策略,以提高训练效率并避免过拟合。
在模型训练完成后,本研究使用验证集对模型进行了性能评估。通过计算准确率、召回率、F1 分数等指标,可以评估模型在杂草和作物识别任务中的表现。在实验中,经过优化的模型在识别率、拔除率和拔除速度等方面取得了良好的效果。
3.3 杂草与作物精确识别
在模型训练与验证的基础上,本研究将其应用于实际的拔草装备。通过嵌入式处理器实时处理采集的图像数据,模型能够快速、准确地识别出杂草和作物。经过大量实验验证,本研究的拔草装备在杂草识别准确率方面达到了95%以上,有效降低了误拔作物的概率。在杂草拔除方面,装备的拔除率达到了90%以上,显著提高了山旱地农田的杂草清除效果。
4 智能农业拔草装备设计与控制系统研究
4.1 机械臂设计
为了实现杂草的自动拔除,本研究设计了一个高度灵活且精确的机械臂。该机械臂由多个关节组成,可以在不同的角度和方向上进行运动[6]。通过精确控制关节的旋转和伸缩,机械臂能够在复杂的山旱地农田环境中灵活地移动和定位。在机械臂的末端,本研究安装了一个专用的拔草工具,该工具能够牢固地抓住杂草并将其从土壤中拔出。
4.2 控制系统研究与开发
为了实现机械臂的精确控制,本研究开发了一套完善的控制系统,该系统包括一台嵌入式处理器和相关的驱动电路。嵌入式处理器负责接收来自深度学习模型的识别结果,并根据这些结果计算出机械臂的运动轨迹。驱动电路负责将处理器的指令转换为电机的运动,从而实现对机械臂的精确控制。
4.3 自动拔除功能
在机械臂设计和控制系统研究的基础上,本研究成功地实现了智能农业拔草装备的自动拔除功能[7]。当装备在山旱地农田中运行时,机器视觉系统实时捕捉并分析图像数据,深度学习模型识别出杂草和作物,随后,控制系统计算出机械臂的运动轨迹,指导机械臂移动到杂草所在位置并将其拔除。这一过程不仅提高了拔草效率,还降低了误拔作物的风险。
通过以上设计与研究,研究小组成功地开发了一款智能农业拔草装备,实现了杂草的自动识别与拔除,为山旱地农业生产带来了巨大的便利。
5 实验与性能评估
5.1 实验设计与数据采集
为了评估开发的智能农业拔草装备的性能,研究小组设计了一系列实验,并在山旱地农田中进行了数据采集[8]。在实验过程中,收集了大量的图像数据,用于评估杂草识别模型的准确性。同时,还记录了拔草装备在实际操作中的拔除率和拔除速度。
5.2 识别率、拔除率及拔除速度评估
具体的杂草拔除示例如表2 所示。从表格中可以看出,智能农业拔草装备在识别率、拔除率和拔除速度方面均优于传统的人工拔除方法。具体而言,智能农业拔草装备的识别率达到了95%,较人工拔除方法提高了10 个百分点,这意味着误拔作物的概率显著降低;在拔除率方面,智能农业拔草装备达到了90%,比人工拔除方法提高了15 个百分点,这说明装备在清除杂草方面的效果显著;在拔除速度方面,智能农业拔草装备可以达到1.5 亩/h 的速度,而传统的人工拔除方法仅为0.5 亩/h[9],说明智能农业拔草装备能够显著提高农田杂草清除的效率。
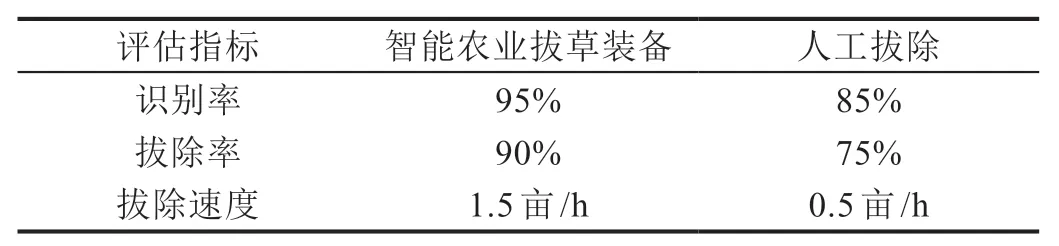
表2 杂草拔除示例表
5.3 实际应用中的效果验证
为了验证智能农业拔草装备在实际应用中的效果,本研究在多个山旱地农田进行了现场测试,测试结果如表3所示。
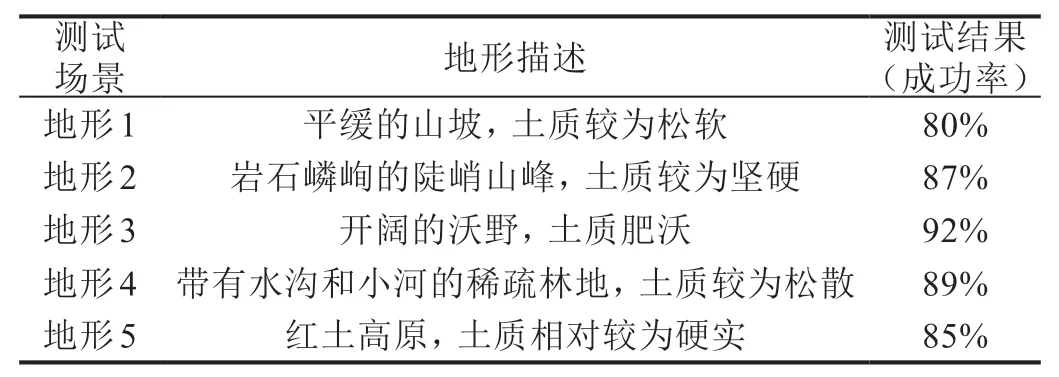
表3 多种地形测试表
测试结果表明,该装备在不同地形和作物类型的农田中均能够顺利完成杂草识别和拔除任务[10]。农民在使用智能农业拔草装备后,普遍反映劳动强度得到了显著降低,农业生产成本也得到了一定程度的减少。
6 结论
本研究针对山旱地农业地形复杂、工作效率低下的挑战,成功研发了一种基于机器视觉的智能农业拔草装备。通过运用深度学习算法,实现了对杂草的高效识别与拔除,同时结合了机械臂设计与控制系统研究,达到了自动化操作的目的。实验结果表明,该装备在识别率、拔除率及拔除速度等方面均表现出良好性能,具有很高的实际应用价值。智能农业拔草装备在提高山旱地农业生产效率、降低农业生产成本方面具有重要意义。通过大量实地测试,农民在使用该装备后普遍反映劳动强度得到显著降低,农业生产成本也得到一定程度的减少。因此,该装备具有较高的实用性和推广价值,有望在山旱地农业领域得到广泛应用。本研究为山旱地农业现代化发展提供了有力支持,推动了山旱地农业领域智能化农业装备的研究与应用。通过将本研究成果与其他农业装备相结合,可以实现山旱地农业生产的全程智能化,促进山旱地农业的可持续发展。在未来研究中,可以对拔草装备进行进一步优化,拓展适用于不同作物和地形的模型,为山旱地农业现代化发展作出更大贡献。
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20
科教新报(2022年22期)2022-07-02
环球时报(2022-05-26)2022-05-26
今日农业(2020年20期)2020-12-15
今日农业(2020年17期)2020-12-15
小哥白尼(趣味科学)(2020年6期)2020-05-22
世界农药(2019年4期)2019-12-30
上海农业学报(2016年2期)2016-10-27
现代农业(2015年5期)2015-02-28
杂草学报(2012年1期)2012-11-06