一种基于改进布谷鸟算法的极值搜索控制方法及应用*
2023-06-21 05:00黄政雨白玉婷
南方农机 2023年13期
黄政雨 , 白玉婷
(1.杭州电子科技大学经济学院,浙江 杭州 310018;2.黔南民族师范学院计算机与信息学院,贵州 黔南州 558000)
0 引言
化石燃料的减少和环境污染的加剧是当今世界面临的重要发展问题[1]。太阳能的利用具有成本低、环境友好、零碳排放和自然资源丰富等优点,受到广大科研人员的青睐[2]。由于不确定的环境影响,太阳能电池功率-电压(P-V)曲线是非线性的,需要一个最大功率点跟踪(MPPT)控制器确保在任何环境下太阳能电池都保持最大功率工作[3]。
极值搜索控制方法(ESC)一般针对不确定复杂动力学模型,通过动态调整动力学参数和反馈控制实现这些系统的最优控制[4]。太阳能光伏系统所处外界环境复杂,最优稳态模型不确定,传统最优控制难以应用,因此可采用极值搜索控制方法实现动态环境下的最大功率点跟踪(MPPT)控制[5]。
传统MPPT 控制技术,例如增量电导法(INC)、扰动和观测方法(P&O)基于梯度下降原理,无法区分局部最优和全局最优值[6]。基于智能优化的MPPT控制技术,例如蚁群算法(ACO)、灰狼算法(GWO)等由于其随机性的特点,动态性能参差不齐且系统振荡过多,工业应用困难[7]。课题组研究了一种基于改进布谷鸟算法(CS)的极值搜索控制方法,并进行了仿真实验以验证方法性能。首先,介绍控制系统动力学模型;其次,介绍基于改进布谷鸟算法的极值搜索控制方法;再次,进行实验测试;最后,对全文进行总结。
1 太阳能光伏系统动力学模型
一般的太阳能光伏系统由三个部分组成,即太阳能电池、DC-DC 转换电路和MPPT 控制器。太阳能电池可以通过电流源、二极管和电阻进行建模[8],数学模型如式(1)所示:
式中,Iph(t)为太阳能电池发电产生的动态电流,Is为二极管饱和电流,V(t)为太阳能电池输出电压,Rs为串联电阻,A、Vt为电路理想系数,可视为常数。DC-DC 斩波电路数学模型已有研究人员研究,如式(2)所示[9]:
综上,可得太阳能光伏系统动力学模型,如式(3)所示:
式中,f、J均为系统状态变量、输出变量的平滑映射函数,其中J为不确定函数。而且由于能量守恒定律限制,该系统为自稳定系统且对于任意的J皆存在u*,使得y=y*,y*≥y(t)。
2 基于改进布谷鸟算法的极值搜索控制方法(ICS)
布谷鸟搜索算法通过模拟布谷鸟的寄生育雏习性有效求解优化问题[10]。布谷鸟采用一种迭代方式由一个巢随机飞向另一个巢,寻找安全孵化幼崽概率最高的巢穴。如果宿主发现了布谷鸟蛋,则会将其扔掉或者弃巢。布谷鸟算法利用Levy 飞行实现布谷鸟由一个巢飞向另一个巢的迭代,如式(4)所示:
式中,i是迭代次数,k=1,2,…,ss是当前搜寻群体中的个体排序,ss是搜索群体大小,α是搜索步长,u和v是基于均匀分布的随机矩阵,如式(5)所示:
其中,u和v的方差如式(6)所示:
每一次迭代后布谷鸟蛋均有被宿主发现的危险,被发现概率为p。若被发现,则布谷鸟会飞向随机巢并重新迭代。为加快算法收敛速度,改进布谷鸟蛋被发现后的迭代算法,布谷鸟不飞向随机位置而继续向当前全局最优dbest迭代,如式(7)所示:
这样就使得算法向当前最优值更快速移动,提升了算法的收敛速度。假设系统扰动响应速度慢于系统控制器输入调整速度,系统输入调整速度慢于系统输出响应速度,则在调节时间内,可认为系统外界扰动为常值,在该时间尺度下系统模型为定长确定模型。以该时间尺度为采样和控制调节时间,在该时间尺度利用改进布谷鸟算法实现优化控制,则可得到系统离散控制率u(k)。
由于物理系统为连续系统,而改进布谷鸟算法为离散算法,因此需将离散的布谷鸟算法转变为连续系统的控制器。基于零阶保持器的原理,在采样的两个时刻之间,控制输入保持不变,则可得离散-连续的极值搜索控制方法,如式(8)所示:
3 数值仿真
本文利用MATLAB 建立了太阳能光伏系统动力学模型,该模型模拟环境温度为20 ℃,PWM 频率设置为100 kHz,采样频率为0.001 s,模拟失配条件下的光伏发电系统输入PWM 信号占空比到输出功率的平滑映射函数。该函数呈现多峰特性,具有4 个极点且最大输出功率为570 W。本文利用Runge-Kutta 方法求该仿真模型的数值解。
实验测试了在相同情况下传统CS 算法和本文提出的ICS 算法的性能,算法仿真结果如图1 所示。传统CS 算法和本文提出的ICS 算法均能找到全局最优值,但本文提出的ICS 算法找到的全局最优值为559.74 W,传统CS 算法找到的全局最优值为522.04 W,且在稳定后传统CS 算法存在小幅度振荡,而本文提出的ICS 算法不存在稳态振荡,因此本文提出的ICS 算法稳态性能远优于传统CS 算法。传统CS 算法在0.078 3 s 后收敛,而本文提出的ICS 算法在0.025 5 s 处实现收敛,本文提出的ICS 算法调节时间三倍优于传统CS 算法。传统CS 算法存在大幅振荡10 余次,小幅振荡20 余次,而本文提出的ICS 算法仅存在大幅振荡两次,小幅振荡一次,算法动态性能远优于传统CS算法。
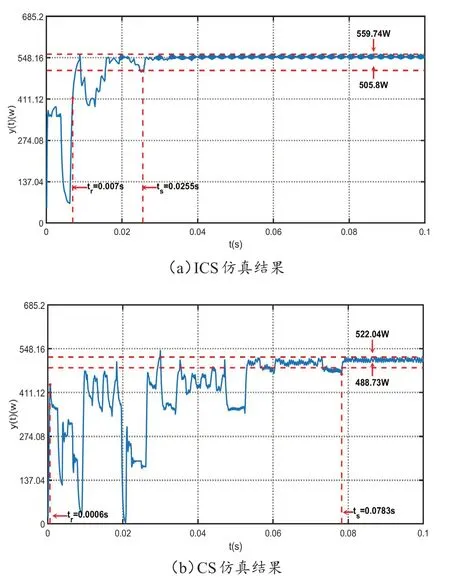
图1 算法仿真结果
综上所述,本文所提出的ICS 算法在仿真研究中动态性能和稳态性能远优于传统CS 算法,其在调节时间、振荡水平和极值搜索能力等方面均性能优越。
4 结论
首先,基于太阳能光伏系统的物理机理和控制电路,课题组提出了一种动力学模型以解释和概括太阳能光伏系统;基于极值搜索控制机理,课题组提出了基于时间尺度的假设,并验证了太阳能光伏系统极值搜索的可能性。
其次,课题组提出了一种基于改进布谷鸟算法的极值搜索控制方法,在采样时间内完成系统的最优控制,并基于离散-连续控制方法实现连续动态太阳能光伏系统的最优控制。该方法结构简单,动态性能和稳态性能卓越,且实现了离散-连续控制转换,可用于数字控制电路。
最后,课题组通过数值仿真将提出的算法在失配条件下与传统CS 算法进行比较,以验证算法追踪全局最大功率点(GMPP)的能力。结果显示,课题组提出的ICS 算法可以非常精准地找到和追踪GMPP,其动态性能和稳态性能均远优于传统CS 算法,其中算法稳态振荡全部消除,算法找到的极值输出功率也大于传统CS 算法,算法调节速度提升了约两倍,算法振荡水平大幅降低。
猜你喜欢
大电机技术(2022年3期)2022-08-06
红蜻蜓·低年级(2021年12期)2022-01-19
核科学与工程(2021年4期)2022-01-12
新世纪智能(数学备考)(2021年10期)2021-12-21
红蜻蜓·低年级(2021年12期)2021-12-19
煤气与热力(2021年4期)2021-06-09
河北理科教学研究(2020年3期)2021-01-04
中华戏曲(2020年1期)2020-02-12
中学数学杂志(2019年1期)2019-04-03
广东技术师范大学学报(2016年5期)2016-08-22