基于PLC 的侧深施肥装置自动控制系统设计*
2023-06-21 05:00:18夏晓谦邱熹程朱爱元夏宁清
南方农机 2023年13期
夏晓谦 , 邱熹程 , 朱爱元 , 夏宁清
(1.益阳职业技术学院,湖南 益阳 413000;2.湖南中天龙舟股份有限公司,湖南 岳阳 414000)
0 引言
目前,我国的化肥施用量已居世界前列。2022年中央一号文件指出,为推动经济社会平稳健康发展,要稳住农业基本盘、做好“三农”工作,持续推进种植业绿色健康发展,推动科学施肥技术普及,确保农业稳产增产。
目前,水稻侧深施肥技术已经逐步得到推广,但侧深施肥只能实现定量施肥,未突破精准施肥技术[1]。首先,现有机型在一定范围内可进行施肥量调节,但基于田块地理条件、土壤性状以及作物生长特征,实现作物定点、定量、定时的精准施肥技术急需突破,现有机型远不能满足肥料“减施”与面源污染控制要求。其次,针对目前采用的机械排肥、气体送肥等施肥方式的机理研究不深入,提升机具工作性能的“瓶颈”依然存在[2-3]。最后,侧深施肥装置中堆肥区域以及排肥区域存在湿度大的问题,需要对其进行干燥,以避免由此产生的肥料颗粒黏结导致堵塞排肥管道以及肥料颗粒破碎等问题[4],降低施肥效果。针对上述问题,课题组设计了一套带恒湿功能的侧深施肥自动控制系统,采用发动机自热导流与阀门控制湿度,通过自动化系统,有效减轻了人员工作量,提高了工作效率。
1 肥料颗粒侧深施放工艺流程
常用侧深施肥机采用边行走边施肥的工作方式,肥料通过积肥区域到达排肥管,再通过螺旋机构将肥料颗粒运送至土壤下层的施肥点,达到精准施肥的目的。肥料颗粒侧深施放工艺流程如图1所示。
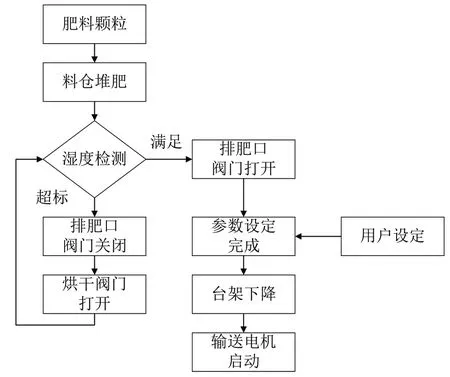
图1 肥料颗粒侧深施放工艺流程图
2 控制系统设计
2.1 系统硬件选型与设计
根据侧深施肥工艺、车辆行走等要求,初步得出主控CPU 及扩展模块分别为6 个数字量输入点、15个数字量输出点和6 路模拟量输入点[5-7]。考虑系统可能会做进一步的拓展,根据经济性,可采用西门子1200 系列产品作为控制系统主控单元,具体可选择西门子1214C AC/DC/ALY 系列PLC(1 600 Ma)作为主控单元,本次选用主体中本体具备14 输入点数、10 输出点数,并具有2 个通道的模拟量输入和4 路高速脉冲输出。根据侧深施肥控制系统要求,本体输出点不足,需要进行数字量和模拟量扩展选用。通过查阅样本手册以及系统控制分析,需选配SM1222型号(135 Ma)数字量输出扩展模块,本模块可扩展数字量16 点位。针对模拟量输入信号要求,需选配SM1231 型号(90 Ma)模拟量扩展,本模拟量扩展模块可增加8 通道模拟量输入。最后,考虑到系统需要进行手动调试、自动化运行以及信息实时显示与监控要求,需要选配人机界面,可选用KTP700 精简7 寸系列设备。
本次所设计系统需要通过湿度传感器等元件将模拟信号传至PLC 主控系统进行分析与控制,根据信号采集不同,需要对湿度、限位、电机转速反馈等方面选择不同功能类型的传感器。系统数据采集模块包括电机转速检测、积肥盒内部湿度检测、肥料位置高度检测的各类传感器,输出电流4 mA~20 mA或输出直流电压0~10 V,同时具有一定的防水、防腐蚀和防潮功能。本次选用的湿度传感器为华控兴业产品,型号HSTL-107WS,其内部拥有高性能的单片机进行信号处理,性能优越,稳定性强,精准度高,适用于室内环境的温湿度测量。其供电电源为24DC,输出信号为DC0~10 V,湿度测量范围为0~100%RH,湿度测量精度为±3%,满足系统控制要求。
根据控制要求对需要控制的对象进行分析[8-10],首先,在1#~6#积肥盒侧面设置单独的烘干阀门,通过阀门的开闭来实现对每个积肥盒的烘干作业。其次,1#~6#电机需要进行速度调节与速度信息反馈。最后,分析机架运动、烘干热风启动、缺肥显示、报警灯常规输出。
2.2 控制系统地址分配
本系统以西门子1214C AC/DC/ALY PLC为中央控制器,控制各个阀门、抬升液压缸、电机的动作,并接收湿度传感器的信号,通过触摸屏与PLC 的通信,完成侧深排肥系统的人机交互功能。设计的I/O接口有27个,其中开关量输入6个、模拟量输入6个、开关量输出15 个,232、485 通信接口各1 个,具体PLC地址分配如表1所示。
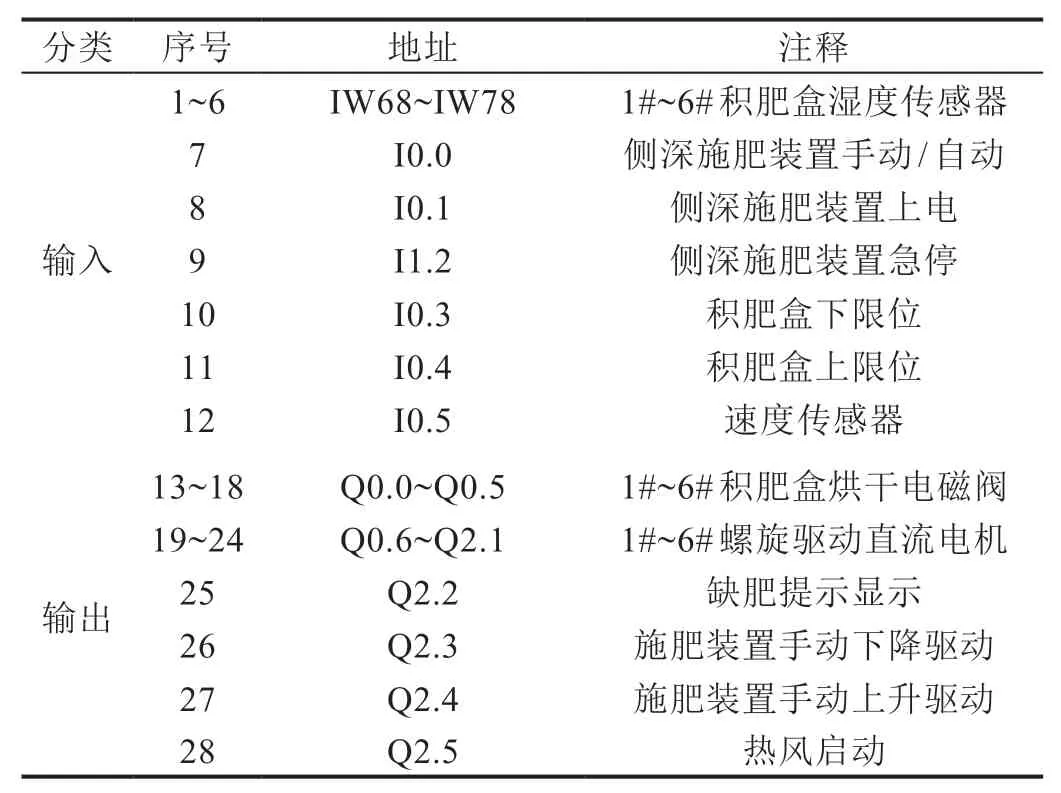
表1 控制系统地址分配
2.3 控制程序设计
在进行程序设计之前,需要对系统控制要求进行梳理。根据侧深施肥系统的工作流程和控制要求,该系统包括手动控制与自动控制两部分,通过触摸屏进行控制方式的切换。采用西门子专用的编程软件博途V16 完成PLC 控制程序的编写,系统模块组成与程序框架如图2 所示。手动程序通过面板上的机械按钮进行操作,自动控制过程采用顺序控制的方式,根据工作过程,先进行系统状态自检与初始化,将系统上电后,检测肥料颗粒是否充足,通过每个积肥盒的湿度传感器进行检测,如湿度超标则停止螺旋电机运转,停止行走并出现报警提示(除湿)。此时,启动热风装置,并根据湿度数据开启对应阀门,对其进行热风干燥。待湿度合适后,关闭热风装置与阀门,开启落料阀门并启动螺旋电机,最终将肥料排入土壤中。由于整体程序较长,程序只截取部分1#号控制逻辑,2#~6#逻辑框架相同,详情如图3至图9 所示。
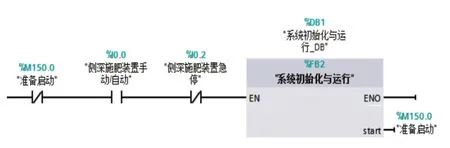
图3 主体系统初始化
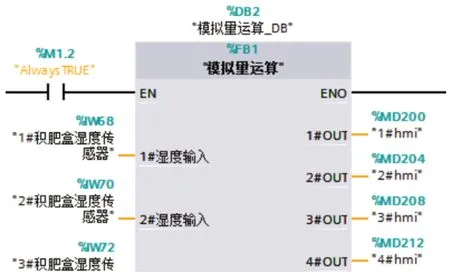
图4 通道模拟量运算子程序
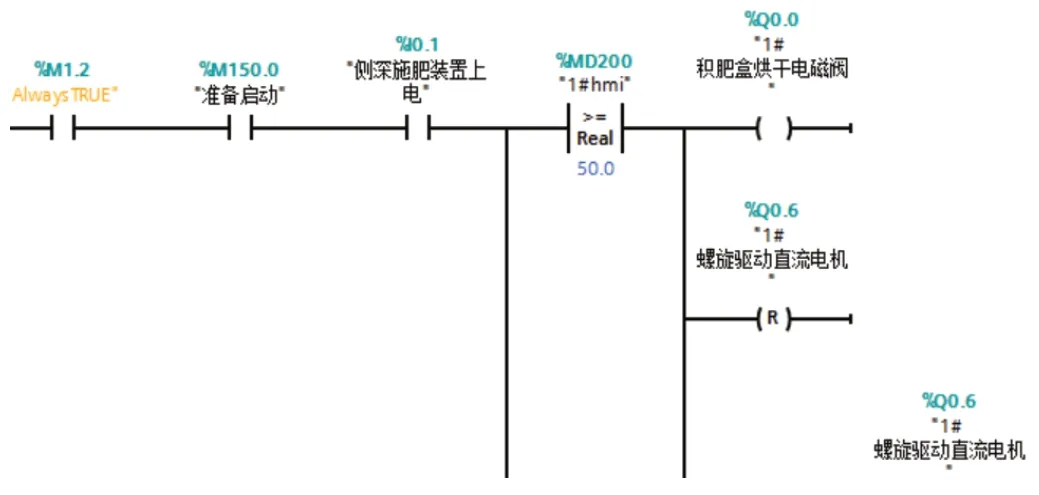
图5 螺旋电机、电磁阀开闭控制
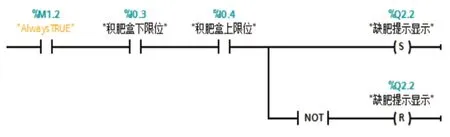
图6 缺肥提示
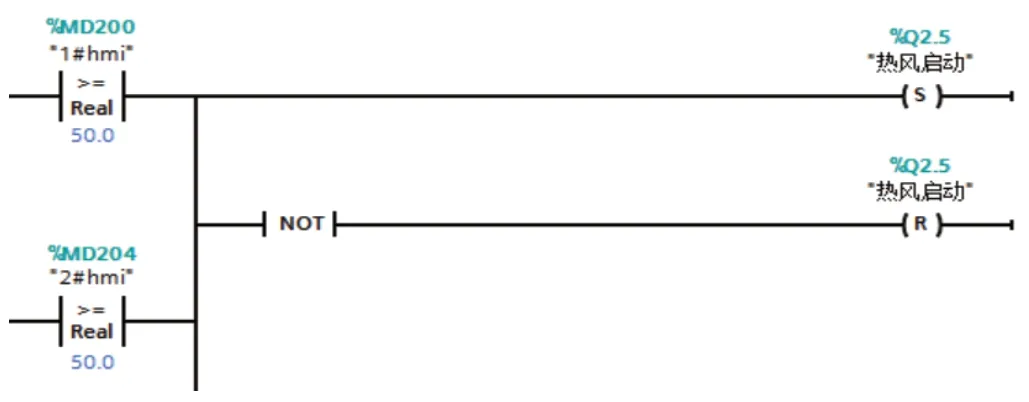
图7 热风启动触发
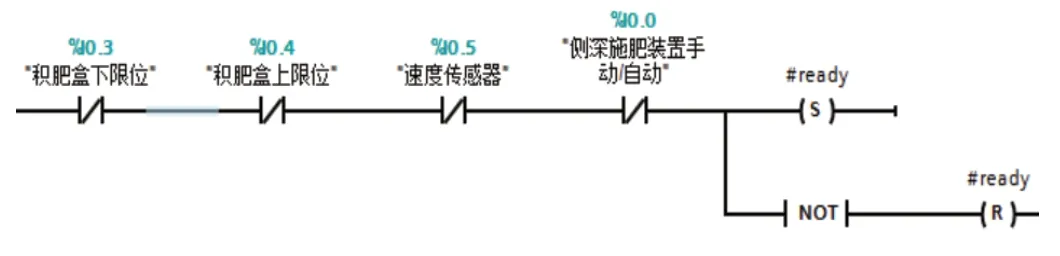
图8 手动/自动状态控制
2.4 触摸屏软件设计
控制程序中需要对一系列数据进行显示,上位机软件采用西门子WinCC V7.0 进行设计,设计系统监控画面,详情如图10 所示。其中,包括肥料量、行走速度、旋转速度、i#实时湿度值、各控制对象状态。当出现肥料堵转、电机过热报警等状态时,会适时进行报警和中断。组态界面可以实现系统的启动和停止,实时监测温湿度环境参数值,观察执行设备运行状态,动态显示温湿度参数实时变化趋势,并可浏览一段时间内的历史变化趋势[11-13]。
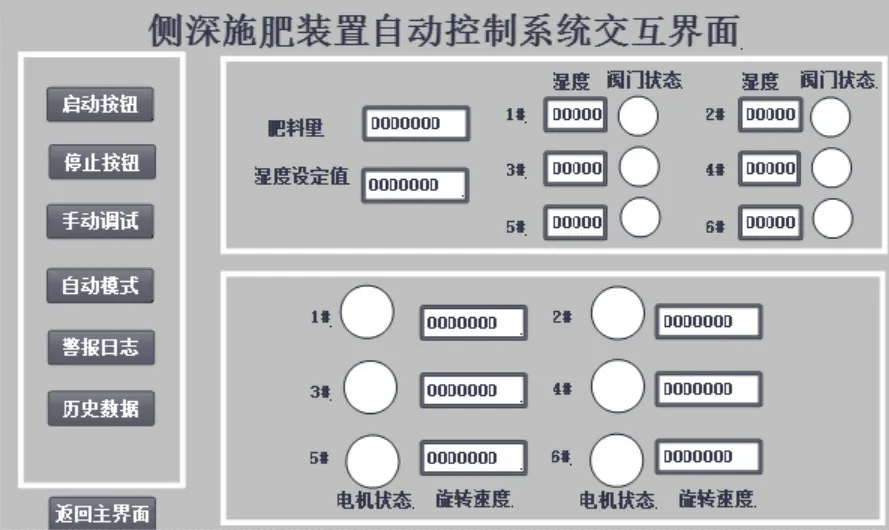
图10 组态界面图
3 结束语
与传统电气控制方式相比,利用PLC 进行侧深施肥控制系统设计具有更高的系统稳定性。同时,通过模拟量控制使得肥料颗粒在施放过程中能保持干燥,能有效避免颗粒黏结和破碎带来的效率问题,具有较好的工程价值。
猜你喜欢
科学大众(2023年21期)2023-12-05 05:23:22
流程工业(2022年3期)2022-06-23 09:41:08
煤气与热力(2021年3期)2021-06-09 06:16:18
中国特种设备安全(2021年9期)2021-03-02 05:40:28
测控技术(2018年12期)2018-11-25 09:37:42
测控技术(2018年9期)2018-11-25 07:44:34
电子制作(2016年21期)2016-05-17 03:53:12
时代英语·高二(2015年2期)2015-05-18 00:08:23
电测与仪表(2015年11期)2015-04-09 11:46:30
中学科技(2014年11期)2014-12-25 07:38:53