基于PLC 技术的规模化养殖场精准饲喂系统的设计*
2023-06-21 05:00黄红玉
南方农机 2023年13期
黄红玉
(广西现代职业技术学院,广西 河池 547000)
规模化养殖方式的应用,可以避免猪肉价格变化过大而严重影响工厂整体生产效益,有效保证生猪养殖安全性,提高饲料、人力资源等信息利用率,降低生产成本,为后期扩大工厂养殖化规模打下了坚实的基础[1]。而基于PLC 技术的规模化养殖场精准饲喂系统的设计和应用,可以保证养殖饲喂的精确性,满足规模化养猪需求,极大地提高生猪养殖的自动化程度。所以,在PLC 技术的应用背景下,如何科学地设计规模化养殖场精准饲喂系统是技术人员必须思考和解决的问题。
1 系统总体设计
1.1 系统总体构成
系统总体结构示意图如图1 所示,从图1 中可以看出,在设计该系统时,首先要结合系统预先所设置好的拟定内容,完成对PLC 的科学化选型,并确定输入点、输出点。采用编程与调试的方式,完成对PLC软件的科学化设计。其次,还要将各个模块安装和固定到饲喂车上,科学化设计饲喂车机械结构,确保饲喂车能够自动完成饲喂工作。饲喂车主要由以下几个部分组成:1)饲喂车盛料箱,该盛料箱主要用于对饲料的盛装。2)槽位检测传感器,该传感器主要用于对槽位的精确化查找和定位,便于智能化控制饲喂车。3)障碍物检测传感器,该传感器主要安装和固定于饲喂车前端与后端,主要用于智能化检测饲喂小车附近存在的障碍物[2]。4)限位开关,通过配合使用限位开关与触碰板,可以定位饲喂车所在轨道的实际位置。5)下料口,通过借助下料口,可以确保饲料准确地下落到合适的位置。6)螺旋杆,通过借助加料电机,可以为螺旋杆提供一定的外力,确保螺旋杆可以快速旋转,使得饲料沿着螺旋杆到达下料口,并顺利下落。

图1 系统结构示意图
1.2 系统工作流程
饲喂小车在启动时,均要做好加料处理,当加料操作结束后,会快速返回到相应的加料位置,然后,饲喂车从加料所在位置进行匀速前进,便于后期更好地开展槽位加料处理。当饲喂车各个槽位加料操作结束后,需要反转处理饲喂车电机[3],促使饲喂车能够向前、向后稳定运行,直到加料位置停下即可,有效保证加料工作效率。
2 系统硬件设计
2.1 PLC控制系统设计
2.1.1 PLC选型
在进行PLC 选型时,要综合考虑PLC 响应速度、存储容量、性能等参数,对启动按钮、暂停按钮、光电开关、电源指示灯等进行智能化控制。同时,还要结合控制对象实际控制需求,改进和优化整个控制系统设备,使得设备运行成本降到最低。系统设计所用到的PLC 主要是由西门子公司所研发的可编程控制器,该控制器表现出良好的扩展性[4],具有强大的通信功能、编程功能。
2.1.2 输入/输出点确定
在确定输入/输出点时,要确保PLC 与工业现场之间建立良好的通信关系。同时,还要借助输入接口,向PLC 系统中安全、可靠地传输现场工作命令,由PLC 系统负责针对性地处理现场工作命令,并借助执行机构,输出相应的工作命令。通过对输入点、输出点进行有效定义,可以提高整个控制系统的稳定性和可靠性。另外,还要结合所设置好的存储器存放范围,定义系统输入点和输出点。
2.2 PLC控制系统硬件组成
PLC 控制系统主要是由PLC、人机界面、无线模块、传感器、直流电机、电源等部分组成。其中,PLC 型号为S7-200 CPU224XPCN,人机界面型号为TPC7062KX,传感器型号为E3F-R2PKPNP,电机型号为36 V 400 W 直流电机,电源型号为12 V蓄电池。
3 PLC软件设计
3.1 PLC编程软件STEP7设计
STEP7 编程软件主要是在参照Windows96 平台设计的,通过运用该软件,可以更好地进行PLC 编程、参数设置、参数监控等环节。该系统在实际设计中,除了用到STEP7 编程软件外,还用到Windows XP系统。
3.2 PLC程序设计流程
PLC 程序设计流程如图2 所示,从图2 中可以看出,PLC 程序设计流程主要包含以下几个步骤:1)通过全面地了解系统整体情况,可以为实现系统整体控制打下坚实的基础。2)绘制系统程序流程图,并明确地表示出各个动作执行顺序和执行条件。3)制定抗干扰措施。结合现场工作情况,寻找干扰出现原因[5],然后,结合系统软硬件特点,制定出切实可行的抗干扰方案。4)编写程序。采用C#编程语言,保证PLC程序流程图实现效果。5)程序调试。采用现场控制的方式,对编写程序进行系统化调试。

图2 PLC 程序设计流程
3.3 PLC软件设计
在完成系统硬件设计的基础上,确定出相应的系统控制任务,程序运行流程图如图3 所示。从图3 中可以看出,程序运行流程具体步骤如下:1)启动PLC程序,并判断和分析设备是否出现异常故障问题,当系统出现异常故障时,PLC 暂停运行,并发出相应的报警声。当设备没有出现故障问题时,可以采用自动方式、手动方式两种判断操作的方式。其中,手动方式需要操作人员手动操作系统[6]。在自动方式下,当饲喂车向前稳定运行时,需要对整个槽位进行全面化检测,分析和判断该槽位是否需要执行相关加料指令。经过判断,如果有加料需求,饲喂车会停止运行,此时,需要开启加料电机。经过一段时间的延迟后,可以保证加料过程实现效果。然后,分析和判断其他食槽是否出现加料需求,如果有加料需求,饲喂车需要继续向前稳定运行,当检测到槽位时,饲喂车停止运行。
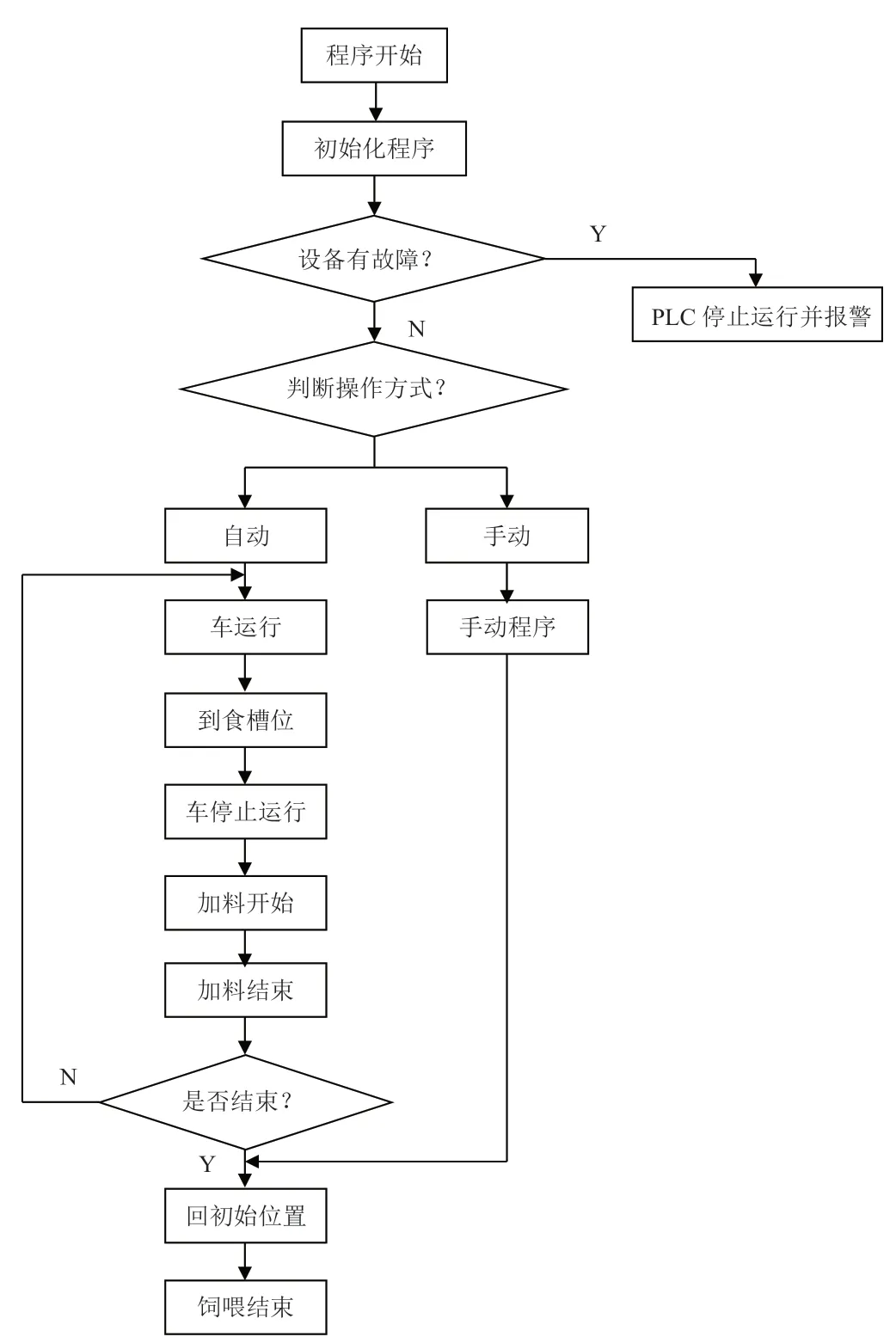
图3 程序运行流程图
3.3.1 数据传输过程的设计
为快速确定饲喂车实际食槽位置,需要利用PLC,系统化处理系统内部数据、外部数据,这就会涉及数据传输过程。首先,要利用槽位,对计数器进行精确化检测;其次,利用数据变量寄存器,完成对所需数据变量值的存储;最后,使用上位机触摸屏,精确地读出槽位位置坐标,便于相关人员查看和了解饲喂车所在槽位位置[7]。当饲喂车移动到某一槽位时,需要将饲料加入该槽位中,此时,系统会启动寄存器,将相关数据安全、可靠地传输到另一个寄存器中,从而完成数据传输过程。
3.3.2 定位过程的设计
通过将光电开关安装和固定到饲喂车上,可以方便相关人员精确化检测饲喂车达到槽位状态。同时,在光电开关的应用背景下,如果没有检测出反射挡板,该光电开关所输出的电平为高电平状态;如果检测出反射挡板[8],该光电开关所输出的电平为低电平状态,借助输入点电平变化,可以促使PLC 能够快速化、智能化处理位置信息。
3.3.3 循环过程的设计
饲喂车主要按照向前运行、向前停止运行、加料电机开启、加料电机关闭环节进行循环执行,通过运用组态软件,可以精确化设置所加饲料的质量。结合系统整个工作过程分析情况,采用步进指令的方式,保证PLC 软件实现效果。在此过程中,首先,需要对饲喂车运行状态进行科学划分[9],使其划分为预备、前进、加料、返回、手动五个步进状态;然后,灵活地切换不同步进状态,保证循环加料实现效果。当然,也可以采用灵活切换自动运行状态与手动运行状态的方式,实现循环加料过程。
3.3.4 加料过程的设计
加料过程在实际设计中,要将前进步进状态直接设置为加料过程,当饲喂车处于前进步进状态时,饲喂车会暂停运行,并启用加料电机,将饲料添加到食槽中,整个加料时间长短可以由操作人员结合实际使用需求,使用触摸屏界面进行针对性设置。当饲喂车加料结束后,加料电机自动停止运行[10],然后,将饲喂车快速返回到预备状态,这说明整个加料过程全部结束。此时,饲喂车可以对下一个食槽进行加料操作,当各个食槽加料操作全部完成后,饲喂车会自动返回到最初暂停位置。
4 系统测试
为验证系统定点加料过程的有效性和稳定性,要重点调试定点加料过程,整个调试流程如图4所示。
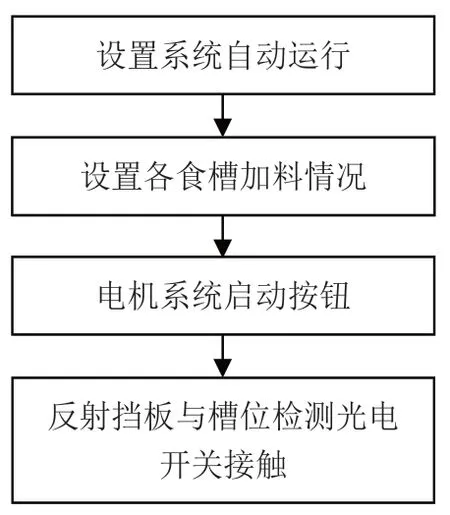
图4 定点加料过程调试流程
通过使用饲喂车,可以实现对反射挡板的精确化检测,检测其是否出现停止运行,并进行加料处理,定点加料调试结果如表1 所示。通过使用该饲喂车,可以科学设置各个食槽加料情况,并执行相关命令。当加料设置结束后,要停止运行饲喂车,此时进入加料环节。当设置“不加料”模式后,需要继续运行饲喂车,禁止对加料过程的执行。

表1 定点加料调试结果
通过运用直流电机调速器,科学地调整和控制饲喂车实际运行速度。同时,严格按照相关技术标准和要求,将饲喂车的运行速度设置为0.6 m/s。结合现场测试情况发现,当饲喂车运行速度达到0.6 m/s时,检测和验证反射挡板是否处于停止运行状态,从而产生相应的缓冲距离。结合饲料质量,适当地改变和控制缓冲距离,饲喂车缓冲距离如表2所示。
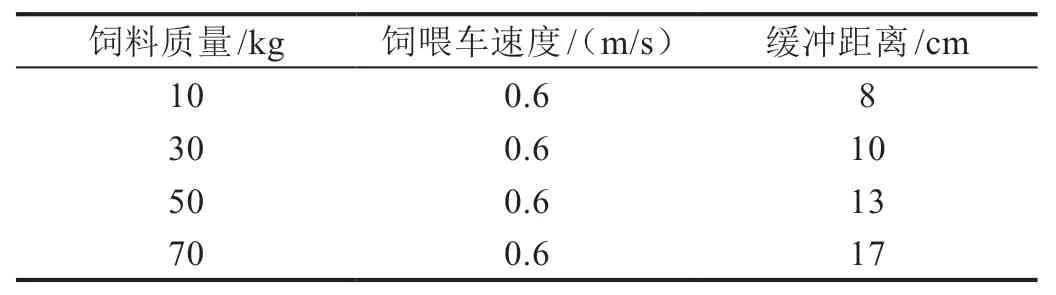
表2 饲喂车缓冲距离
从表2 中的数据可以看出,饲料质量高低与缓冲距离之间存在明显关系。与缓冲距离值相比,食槽长度值相对较高,通过科学地调整和控制反射挡板的位置,便于后期进行加料处理时有效地降低饲喂车与食槽位置之间的偏差,确保加料的精准度得以大幅度提高。
5 结论
综上所述,本设计主要成果如下:1)结合系统应用环境相关指标,科学选型PLC,并做好对输入、输出设备的选择和连接,从而保证系统硬件设计质量。2)使用STEP7-Micro/WIN软件,完成对相关用户程序的编写,并在下载和调试用户程序的基础上,提高精准饲喂系统的设计质量,符合相关技术指标。3)验证和测试系统性能,经过测试,发现系统完全满足预期所设置的技术指标,保证了加料的精准度,促使养殖饲喂管理向智能化、便捷化、高效化方向不断发展。
但是,本设计仍然存在以下需要完善的地方:1)饲喂车定位精确度有待提升,通过新增制动装置,提高制动效率,降低偏移距离。2)系统功能有待优化和丰富,如果将视频监控系统与智能饲喂系统进行组合,可以促使系统功能变得更加全面化。3)PLC 程序有待完善,这就需要相关技术人员调试和解决系统可能出现的异常问题。
猜你喜欢
动漫星空(兴趣英语)(2020年11期)2020-12-04
动漫星空(兴趣英语)(2020年11期)2020-11-06
时代英语·高一(2019年5期)2019-09-03
小学生作文(低年级适用)(2019年5期)2019-07-26
科学种养(2019年4期)2019-04-30
电子制作(2018年12期)2018-08-01
读友·少年文学(清雅版)(2018年12期)2018-04-04
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年19期)2017-02-02
当代化工研究(2016年6期)2016-03-20