AUV 模块化对于操纵性的影响分析
2023-06-15 00:59:56刘隽文永鹏孙翔朱心科周焕银尚红
舰船科学技术 2023年10期
刘隽,文永鹏,孙翔,朱心科,周焕银,尚红
(1.东华理工大学机械与电子工程学院,江西 南昌 330013;2.国电电力浙江舟山海上风电开发有限公司,浙江 舟山 316100;3.自然资源部第二海洋研究所,浙江 杭州 310012)
0 引言
不同的观测任务需要携带不同的传感器,而现有的AUV 设计对于更换传感器困难,因此模块化[1]是AUV 必然的发展趋势。设计能够携带多种传感器的舱段能够减少制造成本,可以根据观测任务的需要自由更换或增加舱段。
一般情况下,实现AUV 搭载更多探测设备的方法有增加附体、改变AUV 外壳外形和增加舱段等。在增加附体方面,赵金鑫[2]根据某些任务为AUV 设计了大尺度挂载,并根据操纵性分析对比,得出大尺度挂载对AUV 的操纵性运动的性能影响量,对于大型的附加载体采用该方法较好。在通过改变AUV 自身外形方面,许锦宇[3]设计出采取上下双半椭圆组合的橫截面结构,能让搭载的机械手收缩并贴合在AUV 的耐压舱外表面,并分析了AUV 在不同运动状态下机械手展开时与收起时受到力和力矩的变化,但在优化AUV 外形阻力时没有把舵和推进器加入考虑。在通过模块化设计方面,王鑫[4]根据模块化思想,设计出自定义舱段的机械结构,安装自定义舱段可以自行搭载更多传感或探测装置,同时对外形进行算法优化,有了兼具一定要求的容积和较小的直航阻力,但是在操纵性方面没有过多涉及。
考虑能源量、观测任务所需要的传感器体积尺寸以及制造成本等综合因素,本文研究的AUV 采用模块化设计,增加舱段搭载更多观测设备。良好的操纵性决定AUV 的稳定性、机动性,一定程度上影响着可携带能源量和使用成本,而增加舱段会对原来AUV 的操纵性产生影响,因此研究模块化AUV 的操纵性非常重要。
在借鉴上述研究结果的基础上,首先建立AUV 与加舱段AUV 的三维模型,通过Fluent 分别计算加装舱段的AUV 和未加装舱段AUV 的水动力系数,通过受力分析,建立数学模型进行仿真,给出水平回转运动仿真、水平面Z 形操舵仿真及空间定常螺旋下潜3 个方面的仿真结果,并分析加装舱段AUV 和未加装舱段AUV 操纵性发生的变化。
1 AUV 的模块化舱段设计
模块化设计的AUV 不同舱段之间采取螺纹连接方式,舱段可以设计为密封舱段或者透水舱段,这里设计采用透水舱段,舱段安装有传感器和浮力材料等,与密封舱段之间通过水密接插件进行数据传输与能源供给,在原AUV 上安装附加舱段后,会改变物理属性如质量、重心、排水体积等,并且也会改变计算的水动力系数数值,最终在操纵性上表现出来。
模块化AUV 与安装附加舱段的模块化AUV 设计参数如表1 所示。

表1 AUV 设计参数Tab.1 AUV design attributes
2 AUV 动力学分析与建模
建立坐标系,对AUV 的水动力、复原力、控制面作用力和推进器推理4 个方面的受力进行分析,建立完整的六自由度运动方程。
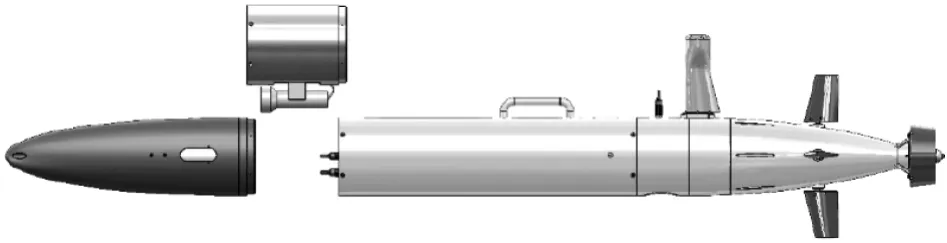
图1 模块化AUV 与附加舱段Fig.1 Modular AUV with additional compartments
2.1 坐标系的建立
建立空间运动坐标系描述AUV 的空间运动,如图2所示。采用国际水池会议(ITTC)推荐的和造船与轮机工程学会(SNAME)术语公报的体系分别建立惯性(定系)坐标系和动系坐标系。

图2 惯性坐标系和动坐标系Fig.2 Inertial and moving coordinates
2.2 六自由度空间运动方程
由刚体动力学理论可得水下航行体在空间六自由度运动方程[5]的一般形式如下:
其中:
式中:m为AUV 质量;Ixx,Iyy,Izz分别为质量m对ox,oy与oz轴的转动惯量;XG,YG,ZG分别为AUV 重心坐标在随体坐标系的位置;u,v,w,p,q,r,分别为运动(加)速度,角(加)速度在动坐标系Gx,Gy,Gz轴的投影;X,Y,Z,K,M,N分别为作用力,力矩对动坐标系Gx,Gy,Gz轴的投影;Fluid,Propeller,Rudder 和Static 分别代表水动力(矩),推进器推力(矩),控制面舵力(矩)和复原力(矩)。
公式中的作用力与力矩X,Y,Z,K,M,N包括AUV 在航行过程中所受到的水动力(矩)重力(矩)和浮力(矩)、推进器的推力(矩)、控制舵的作用力(矩)。整个AUV 动力系统的控制输入分为对纵向的推进器推力Fu,水平舵的舵角 δs,垂直舵的舵角δr,AUV 系统为欠驱动系统。
2.3 水动力
AUV 所受到的水动力一般分为粘性水动力和惯性水动力两类。取等速直航状态(u0=V且u0≠0)作为泰勒级数展开点,将力和力矩泰勒展开并水动力只取到二阶项,考虑到AUV 几何模型的水平面非对称,得出下式[6]:
式中:Xqq,,等均为水动力系数;u,v,w,p,q,r,均为水动力函数的变量。
2.4 复原力(矩)
复原力(矩)描述艇身在横摇和纵摇自由度具备的横稳性和纵稳性,作用于AUV 上的静力包括重力B、浮力P及力矩M。由于重力和浮力的方向一般铅锤向下,所以在定系中的分量为(0,0,P-B)。在动坐标系表示[7]为:
重力P、浮力B对于随体坐标系原点的力矩为:
式中:(xB,yB,zB)为AUV 的浮心位置坐标;(xG,yG,zG)为AUV 的重心位置坐标;P为AUV 总重力;B为AUV 总浮力。
AUV 重心和浮心满足xG=xB,yG=yB,并且在中性浮力下重力P与浮力B相等,且相对于纵中平面对称。
2.5 控制面作用力
舵和桨布局方式为桨前舵,舵型为NACA0012 型。舵的外形参数[8]如表2 所示。
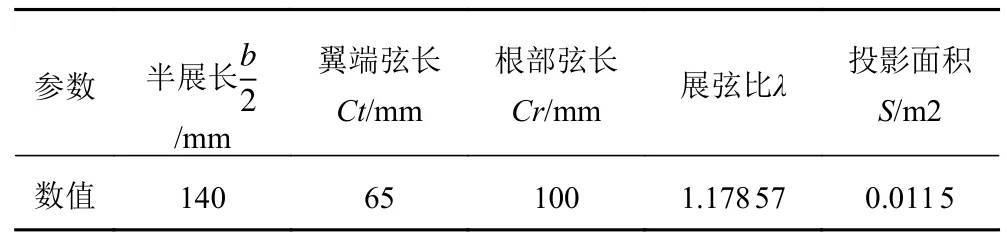
表2 NACA0012 外形参数Tab.2 NACA0012 Shape attribute
当攻角为α,速度为V时,舵受到力R的作用,可以分解为水平方向上的阻力D和与来流方向垂直的升力L,用升力系数CL和阻力系数CD来表征。本文研究的AUV 舵的升力系数与攻角关系、阻力系数与攻角关系如图3 所示。
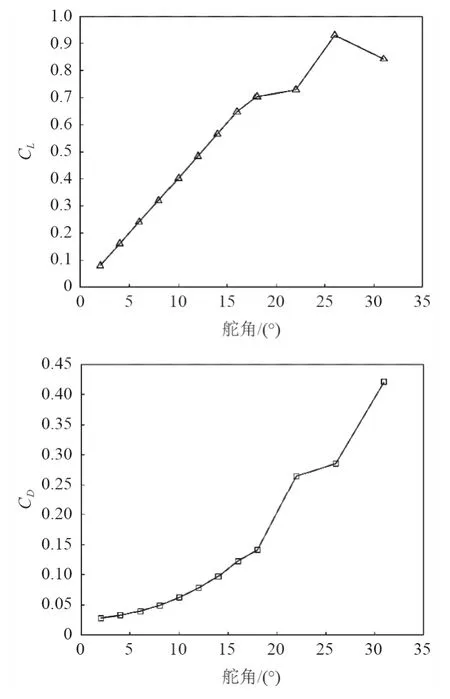
图3 NACA0012 舵的升力系数、阻力系数与攻角关系Fig.3 The relation between lift coefficient,drag coefficient and Angle of attack of NACA0012 rudder
使用Aitken 插值法最终得到的升力系数、阻力系数与舵角的函数关系式,并通过下式和舵翼安装位置得到对AUV 的力和力矩。
上式中:ρ 为流体密度;AR为舵翼投影面积;V为来流速度。
2.6 推进器推力
只在尾部安装有一个单螺旋桨作为推进器,通过试验和查询资料从而获取螺旋桨直径D、进速系数J、推力系数KT和转矩系数KQ,数据经过最小二乘法作最小二乘拟合处理,得到J与KT、J与KQ曲线,再通过AUV 航速V、当前螺旋桨转速n可求得推力T和扭矩Q。
螺旋桨主要参数如表3 所示。
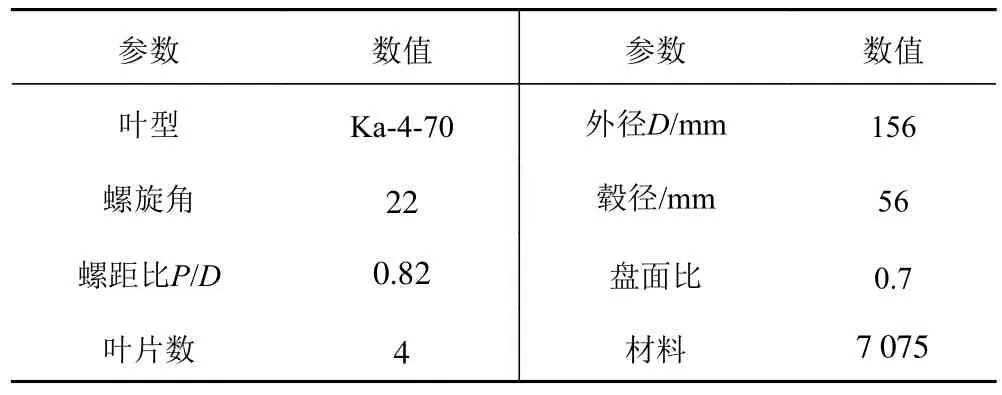
表3 Ka-4-70 螺旋桨主要参数Tab.3 Ka-4-70Main parameters of propeller
推力和转矩的表达式如下:
速度为0~2 m/s,令AUV 与加舱段AUV 以2 m/s直行,此时AUV 与加舱段AUV 的航行阻力分别为32.62 N 与37.38 N。螺旋桨推力系数KT与转矩系数KQ分别为KT=0.392 9,KQ=0.081 9,在725 r/min转速下,AUV 此时的螺旋桨推力与转矩为:
在765 r/min 的转速下,加舱段AUV 此时的螺旋桨推力与转矩为:
由上式可知,在不同转速下旋转的螺旋桨推力能够满足AUV 与加舱段AUV 在2 m/s 的直航阻力,该类型的螺旋桨能够满足要求。
3 AUV 水动力系数的仿真获取
计算AUV 六自由度运动方程所需要的水动力系数,通过分别划分AUV 和加舱段AUV 的重叠网格后导入Ansys Fluent[9]计算获得。模拟A U V 在∆u=0.25 m/s,u∈[0.25,2]直航试验[10];水平面和垂直面斜航试验,其中漂角和攻角∆α,∆β=2°,α,β ∈[−14°,14°];水平面和垂直面纯升沉和纯横荡试验、纯俯仰和纯摇首试验[11],这4 种仿真通过设置Fluent 的UDF 文件进行[12],其中震荡频率为0.2~0.625 Hz,纯升沉和纯横荡试验a=0.04 m/s,纯俯仰和纯摇艏θ0=0.1 rad。将得到的水动力系数进行无因次化处理[13],仿真试验所得部分水动力系数如表4 所示。
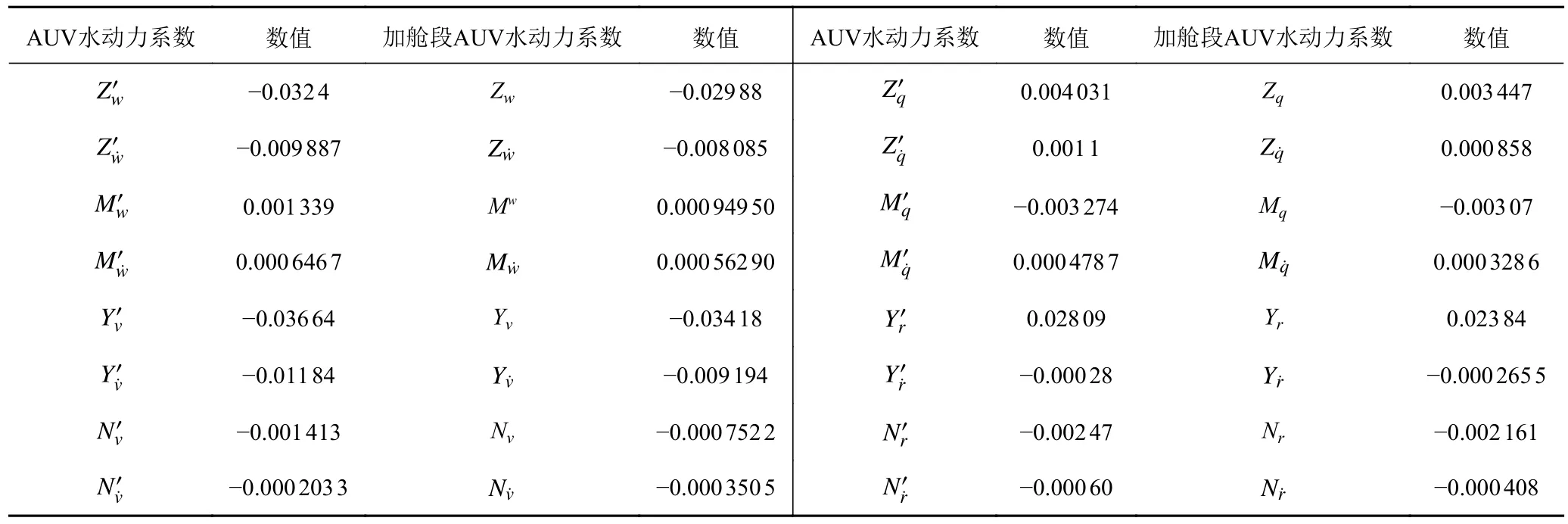
表4 PMM 仿真所得水动力系数Tab.4 hydrodynamic coefficients obtained by PMM simulation
水动力系数中含有大部分的耦合系数,为非线性系数,这些系数测定比较困难,博尔曼[14]于1989 年提出一种关于一些耦合水动力系数的近似关系式,由此可以推算出其他耦合系数。
4 建立AUV 六自由度运动仿真系统
通过Matlab 建立运动仿真程序,仿真流程如图4所示。首先初始化所有的运动状态变量,然后给输入变量赋值(推进器推力、垂直舵和方向舵的力矩),通过六自由度运动方程得到不同坐标系的加速度,根据四阶龙格库塔法[15]求解六自由度运动方程求出AUV 的状态变量(速度、位置和姿态),从而得到运动仿真的重心轨迹。
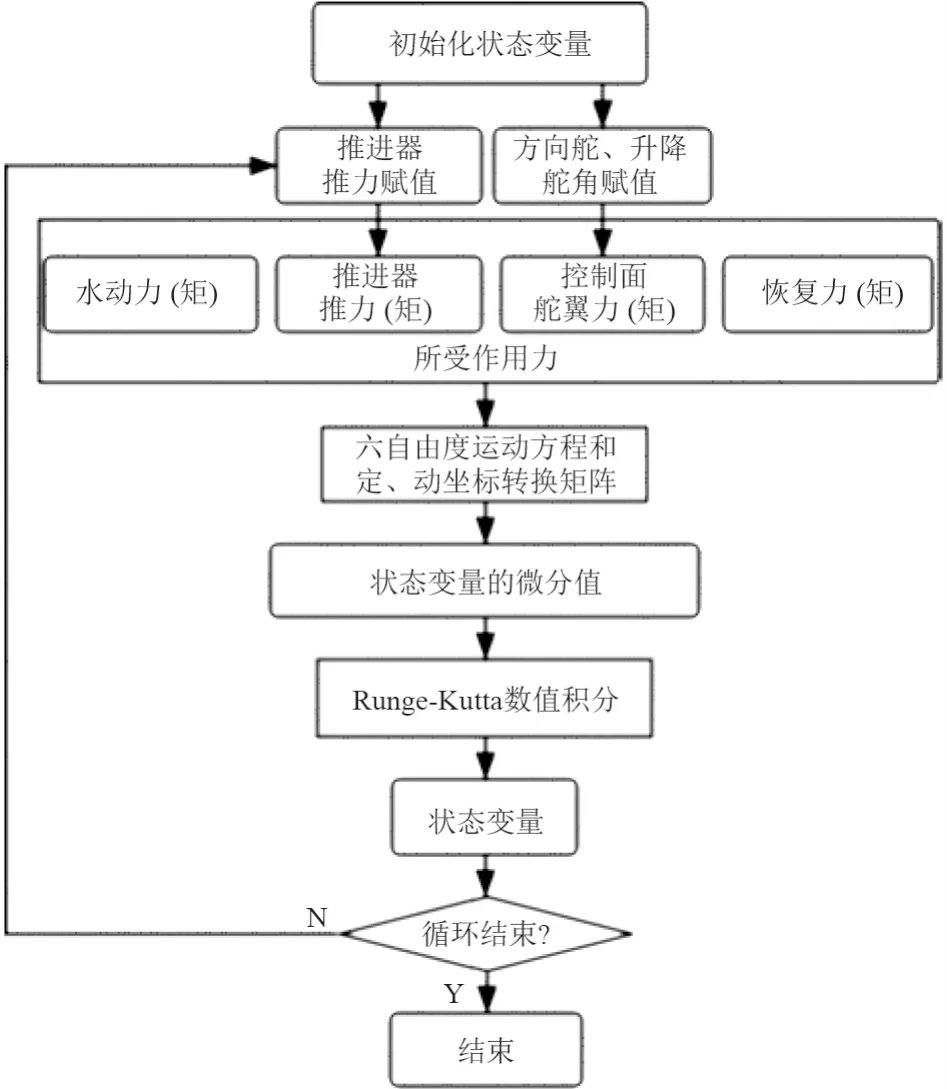
图4 AUV 运动仿真流程Fig.4 AUV motion simulation flow
5 AUV 操纵性分析
研究水平面回转运动、水平面Z 形操舵运动和空间定常螺旋下潜运动,并对AUV和加装舱段的AUV 的仿真数据进行对比,分析加装舱段后对原AUV 操纵性的影响和变化。
5.1 水平回转运动仿真试验
仿真试验为评价AUV 在水平面运动时的回转性能。设定直航速度为2 m/s,仿真总时长500 s,输入控制量的方向舵舵角δr=20°。重心在水平面的运动轨迹如图5 所示。
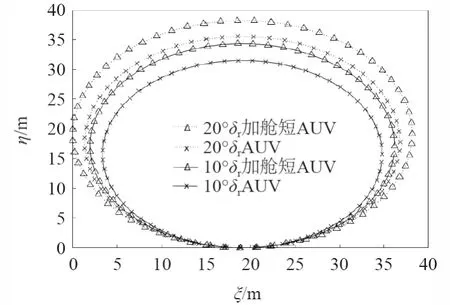
图5 10°与20°方向舵舵角下的AUV 与加舱段AUV 水平回转运动曲线对比Fig.5 Comparison of AUV and cabin added AUV horizontal rotation motion curves under different rudder angles
仿真结果如表5 所示。

表5 回转运动仿真结果Tab.5 Simulation results of rotary motion
定常回转直径D0指定常回转圆的直径。回转周期T0指在水平面回转运动中,从转舵起至回转360°所经历的时间。
5.2 水平面Z 形操舵仿真
该仿真试验是为了评价AUV 的航向改变性能。水平面Z 形操舵仿真时,设定直航速度为2 m/s,垂直方向舵舵角 δr/执行首向角 ψ为10°/10°,操舵速率为6°/s,仿真结果如图6 和表6 所示。
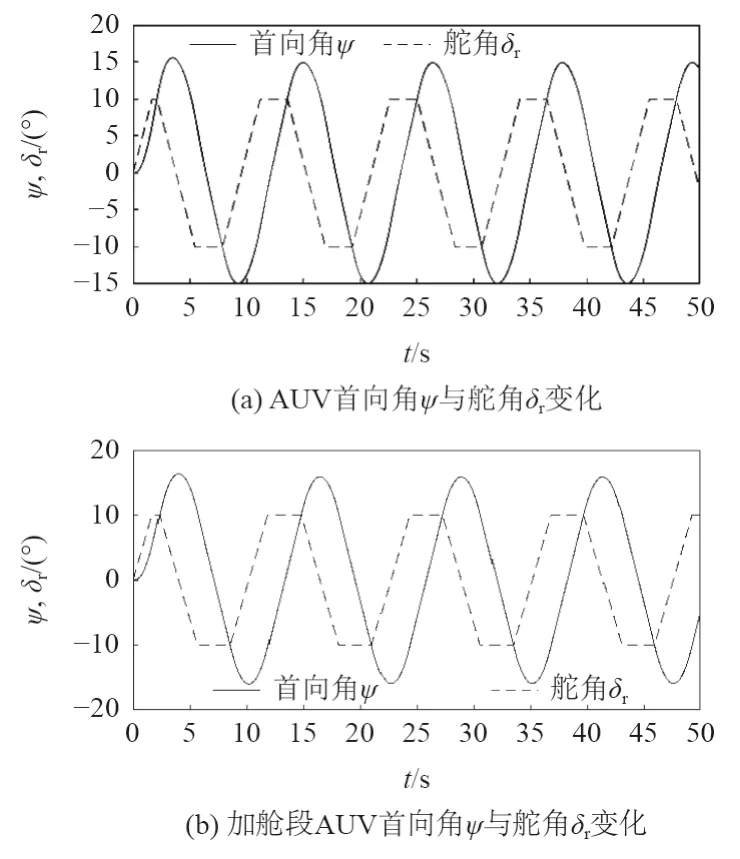
图6 水平面Z 形操舵仿真Fig.6 Simulation of horizontal Z steering
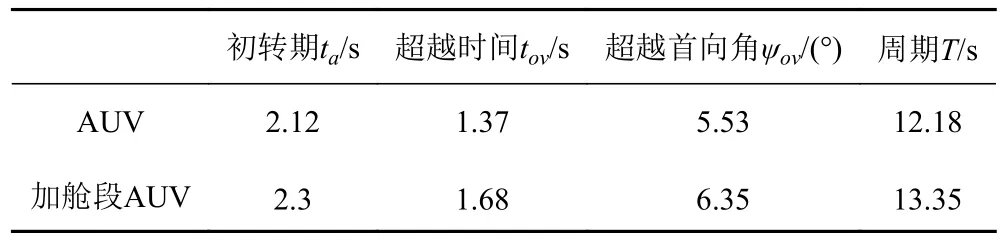
表6 水平面Z 形操舵仿真结果Tab.6 Simulation results of horizontal Z steering
初转期ta为首次操舵起至第一次操反舵止所经过的时间;超越时间tov指从操反舵开始到潜器停止朝原方向回转的时间;超越首向角 ψov指操反舵后潜器继续朝原方向回转所转过的最大角度;周期T指从操舵开始瞬间到潜器完成向右舷和左舷摆动各一次,回复到初始首向角的时间。
5.3 空间定常螺旋下潜运动仿真
该仿真试验是为了测定AUV 空间定常螺旋潜浮机动时的升矩和回转半径。仿真时使AUV 在适当深度以一个预定航速定深直航时,设定水平升降舵和垂直方向舵在预定舵角把定,此时AUV 就会同时进行回转和潜浮运动。空间定常螺旋运动的表征参数有水平面投影直径Ds和升距∆Ye。设定直航速度为2 m/s,输入控制量的方向舵舵角δr=20垂直升降舵舵角δs=20°,仿真时间为200 s,仿真结果如图7 和表7 所示。
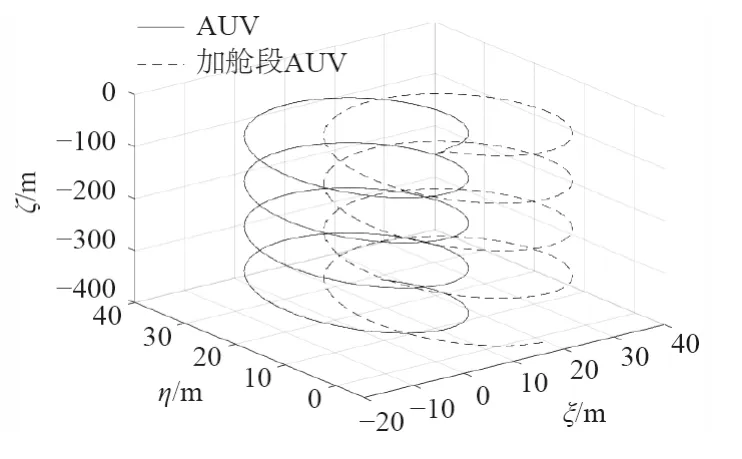
图7 u=2 m/s,δr,δs 为20°的AUV/加舱段AUV 重心轨迹Fig.7 u=2 m/s,δr,δs=20°AUV/ cabin added AUV center of gravity trajectory
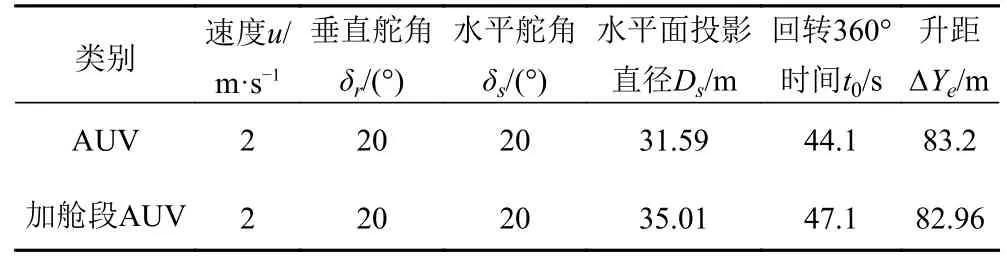
表7 空间定常螺旋下潜运动仿真结果Tab.7 Simulation results of space steady spiral diving motion
水平投影直径Ds指潜器的螺旋运动水平投影圆的直径。升矩指潜器回转360°潜深改变量。
5.4 操纵性分析对比
在水平面回转试验中,在设定条件下,加舱段AUV相比原AUV 的定常回转直径分别大了8.42%,11.37%,10.79%,12.83%,定常回转直径越大,表明加舱段AUV 相比原AUV 水平面内机动性降低。加舱段AUV 相比原AUV 的回转周期时间分别长了11.22%,9.07%,5.56% 和6.14%,表明加舱段AUV 相比原AUV 在大幅度转向的程度上减慢。因此在水平面回转实验中,加舱段AUV 与原AUV 相比,在同一舵角下回转直径D0要更大,回转周期T时间更长,水平面大舵角转向机动性更低。
在水平面Z 形操舵试验中,在设定条件下,加舱段AUV 相比AUV 初转期时间长了8.49%,加舱段AUV 相比原AUV 周期时间长了9.61%,表明加舱段AUV 相比AUV 首向改变减慢。加舱段AUV 相比AUV 的超越时间tov长了22.63%,加舱段AUV 相比原AUV 的超越艏向角大了14.83%,表明加舱段AUV 相比AUV 运动惯性增大。上述4 个特征量表明,加舱段AUV 相比AUV 对舵的响应较快,转首性较好、应舵较快。
在空间定常螺旋下潜试验中,在设定条件下,加舱段AUV 要比原AUV 的水平投影直径大10.83%,加舱段AUV 要比原AUV 的回转360°所需时间长6.8%,表明加舱段AUV 回转360°比原AUV 回转速度减慢。原AUV 要比加舱段AUV 的升矩大0.29%,表明加舱段AUV 比原AUV 下潜速度减慢。上述2 个特征量表明在三维空间的运动下,附加舱段的AUV 要相对于AUV 下潜减慢,空间运动性能下降。
6 结语
运用Solidworks 分别建立AUV 与安装附加舱段的AUV 的几何模型,并通过Ansys Fluent 分别计算AUV 与安装附加舱段AUV 水动力系数以及舵翼的水动力性能。建立AUV 操纵运动数学模型,通过进行AUV 与加舱段AUV 分别为水平回转运动、水平面Z 形操舵、空间定常螺旋运动操纵性仿真试验,对AUV 的操纵性能进行预报。最后对比AUV 与加舱段AUV 的操纵性试验所得试验数据,表明安装了附加舱段的AUV 相比原AUV的运动性、应舵性均下降。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:52
江苏船舶(2021年4期)2021-09-28 08:09:10
舰船科学技术(2021年8期)2021-09-18 08:36:06
舰船电子工程(2020年4期)2020-06-19 06:14:48
制造技术与机床(2019年4期)2019-04-04 12:21:26
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
电源技术(2015年2期)2015-08-22 11:28:02
中国水运(2015年2期)2015-04-23 15:04:07
新高考·高一物理(2014年1期)2014-09-18 15:33:33