基于模糊逻辑的踝足矫形器设计
2023-06-08 08:10蒲文,华伟
现代计算机 2023年8期
蒲 文,华 伟
(四川大学电子信息学院,成都 610065)
0 引言
瘫痪、中风会使患者运动控制存在缺陷导致步态异常,如足下垂是卒中(中风)患者十分常见的后果之一[1]。由于足下垂患者行走时,脚尖拖地或者过度屈膝导致脚尖离地,类似上楼梯时的状态,所以足下垂患者会表现出较短的步长、较长的站立期、较慢的步态速度、更有限的功能性运动和更高的跌倒风险。若下肢长期不进行活动,会导致下肢肌肉萎缩等问题。
目前,踝足矫形器(ankle‑foot orthosis,AFO)是中风相关偏瘫患者改善步态的常用装置,例如2020 年加拿大研究机构研制出由电机驱动的踝足矫形器可以实现踝关节的跖屈和背屈运动[2],周聪[3]设计了一款由绳索驱动的踝关节康复机器,患者穿戴AFO后,在站立和行走时能更好地控制脚踝关节来辅助患者行走,有助于下肢血液循环,通过康复训练来恢复踝关节活动能力,使患者能重新回归正常步态,回归正常生活。
1 踝足矫形器系统设计
1.1 系统组成
基于模糊逻辑的踝足矫形器系统设计如图1所示,主要是由矫形鞋、控制单元、执行单元、数据采集单元构成。
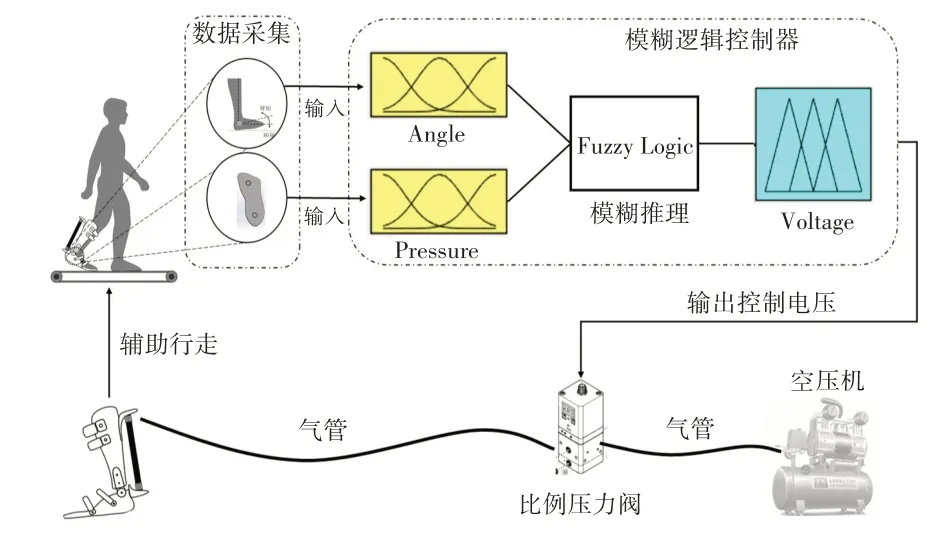
图1 系统概览图
矫形鞋采用超高分子聚乙烯(UHMWPE)材料制成,采用二连杆模型,与气动肌腱组合后实物图如图2所示。

图2 矫形鞋和气动肌腱组装图
系统所用的核心控制器是意法半导体公司开发的STM32F1 系列微处理器产品。执行单元是由Festo 公司生产的比例减压阀和气动肌腱构成,气动肌腱具有功率重量比高、柔韧性好、重量轻等优点,非常适合应用于医疗领域[4]。比例减压阀能够把电压值转为气压值,从而控制气动肌腱充气和放气。数据采集单元主要由传感器构成,其中足底压力传感器用于采集脚后跟和脚前掌的压力值,脚踝位置传感器MPU6050用来采集踝关节俯仰角数值。
1.2 工作原理
人行走时,踝关节主要进行跖屈和背屈活动[5],如图3所示。本文设计的踝足矫形器通过电压来控制比例减压阀开度,比例减压阀又称比例阀,其作为先导控制的调压阀,可以控制0~10 V 的电压信号,实现气动肌肉进出气。具体功能如下:当比例阀显示气压增加,使气动肌腱充气,其轴向压缩、径向膨胀,气动肌腱长度缩短,矫形鞋呈现跖屈状;当比例阀显示气压减小,气动肌腱放气,长度由短变长,为穿戴者提供一个背屈的支撑力。因此矫形鞋可以弥补病人缺失或减少的肌腱力量,达到改善步行的目的。
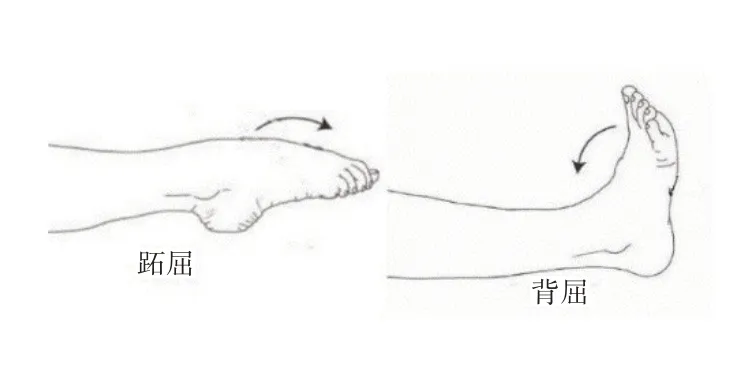
图3 跖屈与背屈
目前已有控制策略是根据脚踝所处位置来输出不同的电压,从而控制矫形鞋跖屈和背屈。但该控制策略只考虑脚踝传感器数据,对于步态周期的判断会因人而异,适合定制开发。模糊逻辑控制属于智能控制的一种,对于被控对象的控制不依赖精确的数学表达式来完成[6],模糊逻辑控制被应用于各种系统中[7-8],都取得了不错的效果。针对踝足矫形器的主动控制策略非线性、时变的特点,本文提出一种模糊逻辑控制策略,以足底压力和踝关节位置作为控制器输入,经过模糊规则计算后,由控制器输出确定的电压。
2 模糊逻辑控制器设计
模糊逻辑控制器的控制目标是控制气动肌腱充气或放气,使得矫形鞋配合穿戴者行走,并且在摆动提供支撑,预防足下垂情况的发生。本系统尽可能地优化隶属度函数和规则的数量,以使得系统简单有效。
2.1 输入、输出量的模糊子集与隶属度函数的选取
本文设计的模糊逻辑控制器为双输入、单输出的控制器,输入为踝关节角度(ankle)和足底压力(pressure),输出为电压值。
在穿戴矫形器行走的过程中,位于踝关节处的位置传感器的论域为[-25, 25]。将其所在论域的模糊子集分为3 个,分别为BWD(向后)、STD(站立)、FWD(向前)。其隶属度函数如图4所示。选择广义钟型隶属函数,是因为该函数比三角形或梯形等隶属函数更平滑。
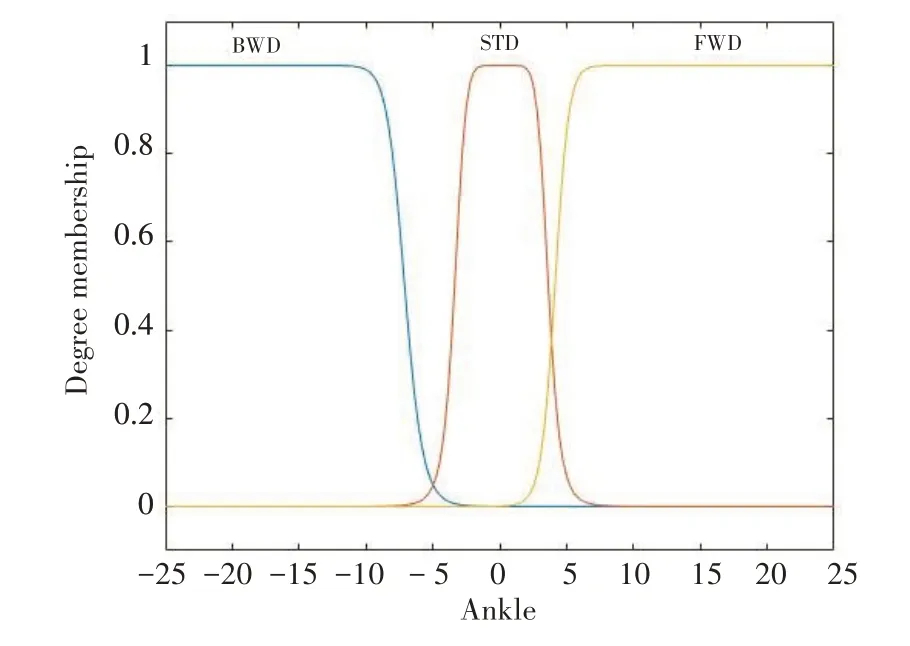
图4 踝关节角度(Ankle)隶属度函数
足底压力的论域为[0,3],输入模糊逻辑控制器的足底压力数据经过处理,能判断出压力点受力情况。因此将其论域的模糊子集分为4个,分别是ZZ(前后脚掌都无压力),ZO(前无后有),OZ(前有后无),OO(前有后有)。其隶属度函数如图5所示。
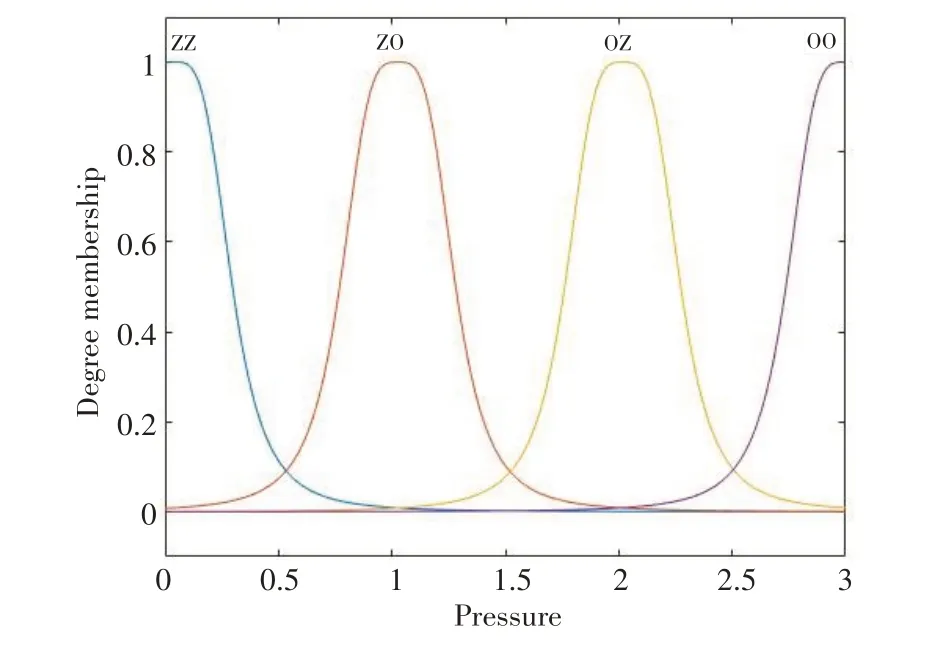
图5 足底压力(Pressure)隶属度函数
输出电压的论域是[0, 10],将其论域的模糊子集分为5个,分别为L(低),ML(中低),M(中),MH(中高),H(高)。其隶属度函数如图6所示。
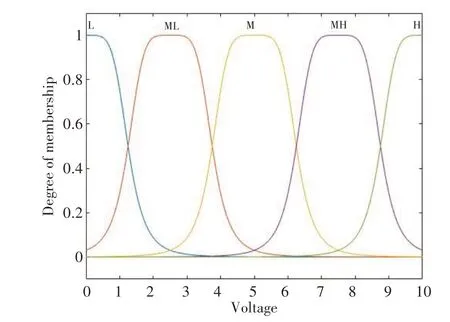
图6 输出电压(Voltage)隶属度函数
2.2 模糊逻辑控制规则
本系统想要达到的目的是,在行走时,当踝足处于正常步态时,矫形器协同行走;当踝足处于不正常步态,如足下垂时,矫形器将限制过度跖屈,保持踝足所处位置以进入下一步态周期。根据先验知识,设置了6条模糊逻辑控制规则,如表1所示。
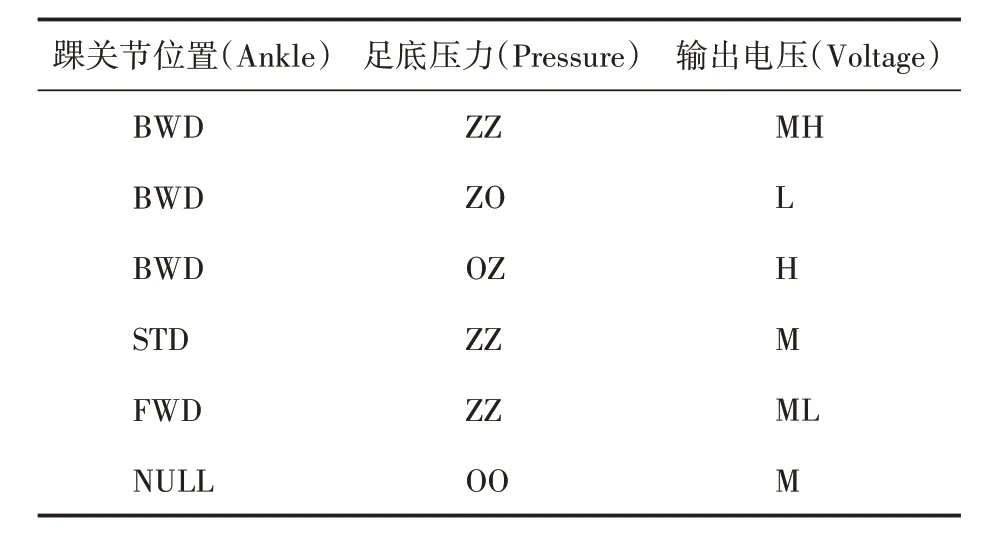
表1 模糊逻辑控制规则
2.3 输出模糊量的清晰化
利用Matlab 软件中的模糊系统设计器对模糊逻辑控制器的行为进行了仿真。在模糊系统设计器中插入隶属函数和规则设计后,图7所示的模糊表面查看器的形式观察输入和输出之间的关系,显示了输入和输出的所有可能的组合。
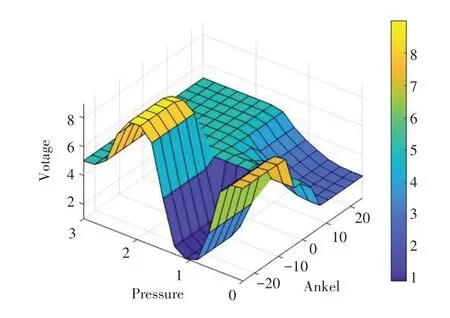
图7 输出电压Voltage随输入变化的曲面
当足底压力为3(前后脚掌都有压力)时,此时电压输出为5左右,气动肌腱充气量适中,矫形器保持站立姿态;当足底压力从3 到1,角度为负数时,代表从站立阶段到摆动阶段,此时输出电压由大变小,刚好配合穿戴者行走;当摆动阶段结束时,输出电压达到最小,矫形器呈背屈姿态,使脚后跟先着地,刚好预防足下垂,避免了脚尖先着地的情况。
3 系统调试
利用本文设计的模糊逻辑控制器,移植到系统后,让试穿者穿戴踝足矫形器进行测试。记录测试过程中的传感器数据和输出电压。如图8 所示。当踝关节角度在0 附近时,穿戴者处于站立姿态,此时输出电压为5 V左右,气动肌腱充气使得矫形鞋也处于站立位置。当踝关节角度持续下降到-20 甚至-30 时,穿戴者脚尖蹬地,即将进入摆动阶段,此时输出电压增大,气动肌腱持续缩短,使得矫形鞋呈现跖屈状,完全配合穿戴者行走意图。当踝关节角度逐渐增加时,穿戴者处于摆动阶段,角度增加达到极限时,穿戴者理应脚后跟着地,为进入站立阶段做准备,从图8可见,此时输出电压达到该步态周期最小值,表明气动肌腱放气,其长度增加,使得矫形鞋呈背屈状,从而保证穿戴者脚后跟先着地。当穿戴者再次恢复站立姿态时,输出电压又变成5 V左右。整个步态周期内,矫形鞋先是配合穿戴者跖屈意图,然后从摆动阶段到站立阶段前,又使得矫形鞋背屈状,防止穿戴者脚尖拍打地面,避免了足下垂情况的发生。
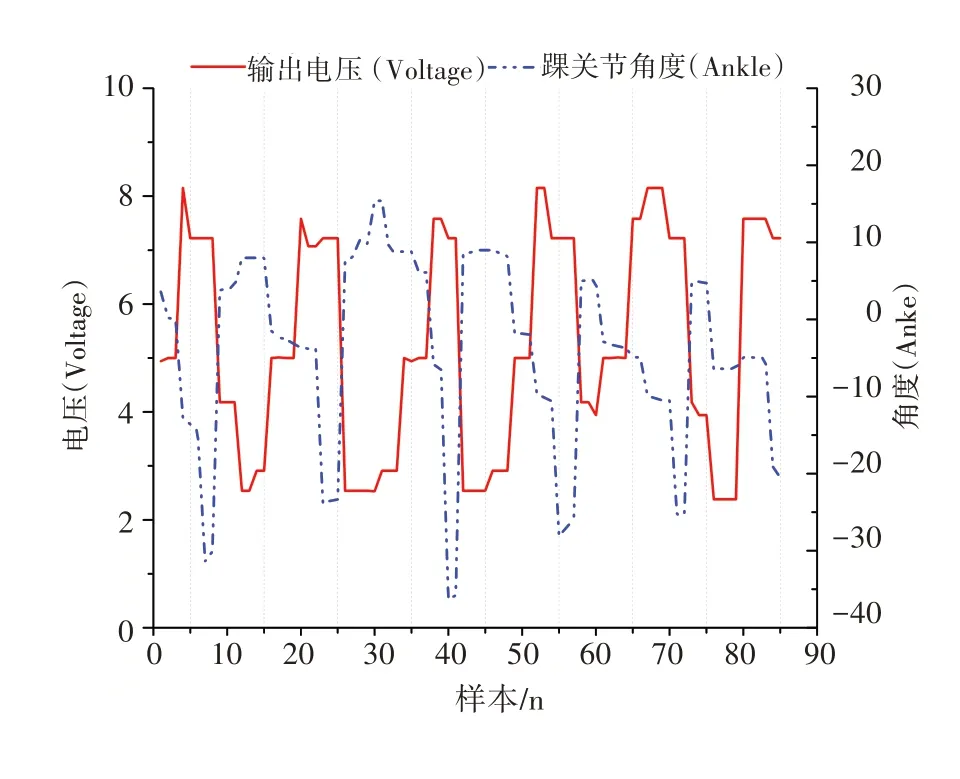
图8 行走测试中的踝关节角度和电压
4 结语
本文将模糊逻辑算法应用于主动型踝足矫形器的控制策略中,适应性较强,以此来辅助足下垂、肌无力等踝足损伤的患者进行康复训练。经过实际测试,表明该装置能够有效地预防脚尖拍打地面,减少了患者摔倒的可能性,规避了一些风险,有助于提高患者主动步行的能力。
猜你喜欢
保健医苑(2023年2期)2023-03-15
南方农机(2022年7期)2023-01-04
家庭百事通·健康一点通(2020年2期)2020-03-25
活力(2019年22期)2019-03-16
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
现代商贸工业(2016年34期)2016-03-13
焊接(2016年5期)2016-02-27
中国康复理论与实践(2015年7期)2015-05-09
中国医药导报(2015年27期)2015-02-28