实验动物运动模型的特点与应用
2023-06-08 01:11:40李瑞,董毅*
中国体育科技 2023年5期
李 瑞 ,董 毅 *
运动影响着人体每个系统、器官和组织(Wang et al.,2010),合理运动对健康大有裨益。然而,运动对人体各个系统影响的途径和机制仍存在诸多问题有待阐明。为了进一步研究这些问题,研究者开发出许多用于动物研究的体育锻炼模型,即运动模型。本研究总结目前已有动物模型的研究进展、优缺点和应用范围,并对未来研究的发展趋势提升展望。
1 运动生理学研究中动物模型的重要性
运动生理学在正确认识人体机能活动基本规律的基础上进一步探究体育运动对人体机能发展变化的影响,以此阐明运动对健康、疾病治疗的影响和机制(Lemanne et al.,2013; Pate et al.,2004)。不同的运动模式对人体的作用不同,有氧运动可以提高心肺耐力,阻力运动可以使肌肉力量和耐力增强。除运动模式外,运动的强度(低、中和高强度)、运动频率、运动时间(早晨、晚上)、持续时间(长期、短期)和运动环境(冷环境、热环境)也是决定生理反应和作用结果的因素(Laursen,2010; Seo et al.,2013)。相比人体实验,动物实验可以降低成本并有效监测实验进展。其中,啮齿动物具有寿命短、妊娠期短和易繁衍的优点。同时,人体实验的一些标准可以在动物模型上实现,比如人体运动强度的检查标准是通过实时记录摄氧量(O2)和最大摄氧量(O2max)进行判断,这也是动物模型中最常用的方法(Kemi et al.,2002; Wisløff et al.,2001b)。能否将人体运动生理学指标在实验动物上建立相应的模型是目前动物运动模型是否有效的关键。在动物运动模型中合理安排运动训练方案对于揭示潜在的生理机制至关重要,这也是动物运动模型建立的要点。此外,不同动物运动模型对健康产生的影响和机制也各不相同,因此运动生理学研究中对动物运动模型的选择也非常重要。
2 动物运动模型
目前,常见的动物运动模型主要集中在跑台、游泳、自愿转轮、举重、爬梯等,这些模型已广泛用于研究运动表现或疾病运动干预后的恢复及其机制。实验前应考虑影响运动表现的因素,包括环境、运动强度、实验动物的品系、性别、年龄和劳损等(Coimbra et al.,2008; Kobayashi et al.,2012),做好必要的准备工作可以提高动物运动模型的可靠性。更重要的是,实验过程中研究人员必须确保对动物进行锻炼方案时采用人道的程序(Lerman et al.,2002)。
2.1 跑台运动
在啮齿类动物中,研究多采用跑台运动,其原理是在跑步过程中通过调整速度、坡度和持续时间3 项参数对运动强度进行控制,从而模拟人类运动模式。目前的研究已经设计了多种跑台运行方案,总训练持续时间从数周到数月不等,一次训练持续时间从数分钟到数小时不等,运动速度范围为10~97 m/min,跑步机的坡度范围为0°~30°(Fenning et al.,2003; Kemi et al.,2002; Wisløff et al.,2001a; Zhang et al.,2002)。有研究发现,当坡度从0°变为30°时,大鼠O2max在64.5~79.9 mL·kg-1·min-1变化,表明跑台的坡度会影响O2的水平(Wisløff et al.,2001a)。在跑台运动中,跑步速度既可以调节训练强度,也可以在低强度运动中估计O2max(Høydal et al.,2007)。此外,不同持续时间的运动表现出不同的生理反应和实验结果(Evangelista et al.,2003)。本研究对跑台模型中通过调整参数所衍生的运动模型进行分别阐述。
2.1.1 运动性疲劳模型
为了使动物达到运动性疲劳,一项研究采取7 周的高强度运动建立了慢性运动性疲劳动物模型。具体方法如下:实验的前5 周运动负荷逐级递增,每周的速度分别为15、22、27、31、35 m/min,20 min/天,5 天/周,最后2 周的速度为35 m/min,一般训练组为20 min/天,强化训练组为25 min/天(郑澜 等,2003)。另一项研究采取4 周的训练建立了运动性疲劳模型。具体方法如下:4 周的跑台速度分别为28、30、30、32 m/min,120 min/天,6 天/周,跑台坡度为10° (王平 等,2009)。侯莉娟等(2017)通过7 天训练建立了力竭性运动疲劳模型。具体方法如下:每天的训练负荷分为3 级(8.2 m/min、15 min,15 m/min、15 min,20 m/min、运动至力竭)。与以上建模模式不同,刘晓莉等(2012)采用多级递增负荷建立力竭运动的疲劳模型。具体方法如下:先进行3 天适应性跑台训练,1 次/天,15~30 min/次。当大鼠能以20 m/min 的速度持续运动30 min 时,可正式开始实验。跑台坡度为0°,负荷分为3 级,分别为8.2 m/min、15 min,15 m/min、15 min,20 m/min、运动至力竭。方剑乔等(2009)采取5 级递增跑台训练建立运动性疲劳模型。具体方法如下:前6 天在坡度为5°的跑台上,每天分别以10、15、20、24、28 m/min 的速度各运动10 min,第7 天以28 m/min 的速度持续运动至力竭。还有研究采用3 种不同的运动强度建立了急性运动疲劳性模型,分别为短时间大强度运动组(20 min,28 m/min)、长时间中等强度运动组(100 min,18 m/min)和超长时间中等强度运动组(200 min,18 m/min)(田野 等,1995)。大鼠力竭标准为动物不能维持跑台速度继续运动,滞留于跑道后挡板不动,使用光、电、声刺激驱赶无效,并伴有呼吸急促、俯卧跑台、垂头不起等行为表现。由此可见,根据建模参数的选择可建立不同的运动性疲劳模型(表1)。
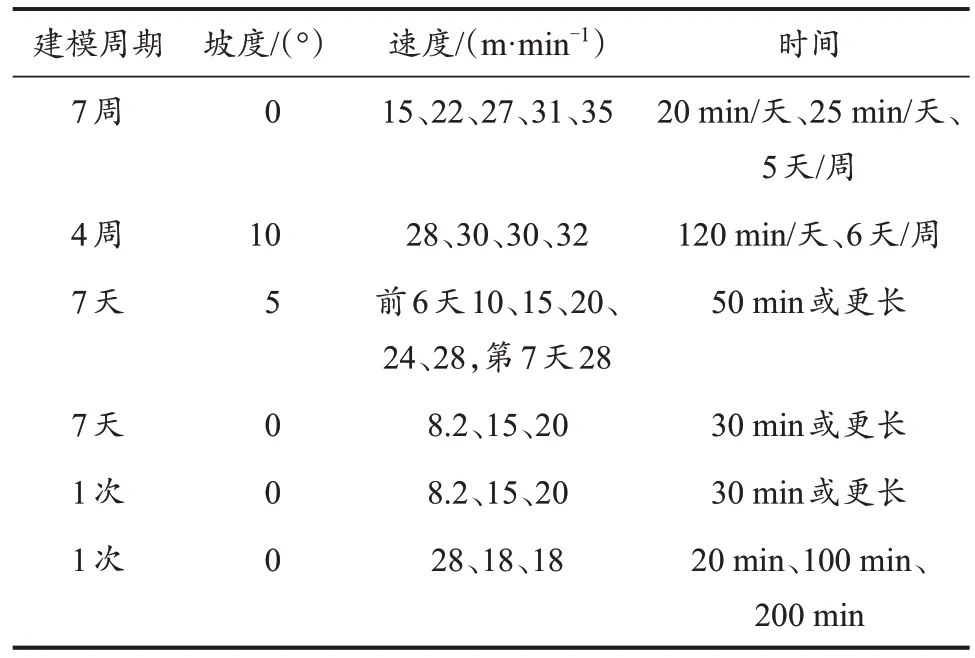
表1 不同运动性疲劳模型的建模参数Table 1 Modeling Parameters for Different Exercise-Induced Fatigue Models
2.1.2 过度训练模型
为了探究人类过度训练的影响,研究者设计了动物过度训练的模型。一项研究采取17 周的跑台训练建立了过度训练模型。具体方法如下:第1 周:坡度为5°,10 m/min、20 min;第2 周:坡度为5°,15 m/min、10 min,18 m/min、20 min;第3 周:坡度为5°,18 m/min、15 min,20 m/min、15 min;第4 周:坡度为5°,20 m/min、20 min,22 m/min、20 min;第5 周:坡度为5°,22 m/min、20 min,25 m/min、15 min,28 m/min、15 min;第6 周:坡度为5°,25 m/min、20 min,28 m/min、20 min,30 m/min、20 min;第7 周:坡度为5°,28 m/min、30 min,30 m/min、40 min;第8 周:坡度为5°,30 m/min、30 min;坡度为10°,32 m/min、40 min;第9 周:坡度为10°,32 m/min、70 min;第10 周:坡度为10°,35 m/min、30 min,38 m/min、40 min;第11 周:坡度为10°,38 m/min、30 min,40 m/min、40 min;第12~14周:坡度为10°,40 m/min、40 min,42 m/min、30 min;第15~16周:坡度为10°,42 m/min、30 min,45 m/min、40 min;第17 周:坡度为10°,45 m/min、30 min,48 m/min、40 min(张崇林 等,2011)。另一项研究采取11 周的跑台训练建立了过度训练模型。具体方法如下:第1 周:15 m/min,20 min,1 次/天;第2 周:20 m/min,30 min,1 次/天;第3 周:22.5 m/min,45 min,1 次/天;第4周:25 m/min,60 min,1 次/天;第5~8 周:25 m/min,60 min,1 次/天;第9 周:25 m/min,60 min,2 次/天,1 次间隔4 h;第10 周:25 m/min,60 min,3 次/天,1 次间隔3 h;第11 周:25 m/min,60 min,4 次/天,1 次间隔2 h(Hohl et al.,2009)。此外,一项研究采取8 周递增负荷跑台训练建立了过度训练模型。具体方法如下:跑台坡度为10°,一般训练(1~4 周)和力竭训练(5~8 周)各4 周,6 天/周。每周的速度与持续时间分别为:第1 周:10 m/min,10 min;第2 周:10 m/min、10 min,15 m/min、10 min;第3 周:10、15和20 m/min 各10 min;第4 周以10、15、20、25 m/min 的速度各进行10 min 的训练;从第5 周开始,每天分别以15、20 和25 m/min 的速度各运动10 min,随后加速至30 和35 m/min 各运动20 min,并且不断增加跑台速度,直至力竭(郑陆 等,2000)。徐琳等(2019)也采取8 周递增负荷跑台训练建立了过度训练模型。具体方法如下:第1~4 周:坡度为0°,60 min,60%EV;第5周:下坡14%,60 min,60%EV;第6周:下坡14%,60 min,70%EV;第7周:下坡14%,60 min,75%EV;第8 周:下坡14%,60 min,75%EV,训练2 次[EV=V+(n/b)·a。其中,v 是上一个完成阶段的速度,n 为完成阶段的持续时间,b 为该阶段的持续时间,a 是增量速度]。因此,不同的训练方案均可以建立过度训练模型,从训练周期时长及便于研究出发,建议研究人员优先选择上述后两种方案。
2.1.3 高强度间歇性运动模型
研究多采取跑台运动建立动物高强度间歇运动模型。一项研究采取12 周的跑台运动建立了该模型。具体方法如下:跑台坡度为5°,高速阶段以25 m/min 的速度快跑3 min,低速阶段以15 m/min 的速度慢跑1 min,重复10 组,40 min/天,5天/周(张子怡 等,2020)。另一项研究采取8周的跑台运动建立了该模型。具体方法如下:适应阶段,跑台坡度为0°,速度为8.3 m/min,训练2 天。正式训练阶段,热身活动以8.3 m/min 的速度运动4 min,再以跑台坡度10°、25 m/min、4 min 和跑台坡度0°、8.3 m/min、4 min 重复7 组,60 min/天,5 天/周(施曼莉 等,2015)。此外,还有研究采取4 周的跑台运动建立了该模型。具体方法如下:1 周的适应阶段,跑台坡度为0°,10 m/min,20 min,1 次/天。正式训练阶段,30 m/min、1 min,15 m/min、3 min,重复3 组,随后每周比前一周多重复1 次(王蒙 等,2020)。
通过对参数的调整可以建立不同的跑台运动模型(运动性疲劳、过度训练和高强度间歇性),研究者可根据实验需要进行选择和设计。目前对各种跑台运动模型的建立尚未有统一的标准,还需进一步的深入研究。
2.1.4 跑台运动模型的优缺点和适用范围
2.1.4.1 优点
1)精确控制运动强度、运动量、持续时间、坡度、速度和距离,便于变量控制。2)跑台设备由计算机控制,实验数据的获取和实验数据的分析效率高。3)跑步机能在受控条件下测量运动和心血管参数。
2.1.4.2 缺点
1)实验通常是压力性的和非生理性的,使用负面刺激(电击)导致活动模式与正常的小鼠行为相差较大。2)实验安排在白天,这与鼠类夜间活动的昼夜模式相反,可能对运动的生理反应和分子机制产生混杂影响。3)跑台可能会难以激励动物长时间运动,并且动物可能会因强行奔跑而遭受身体和心理压力。
2.1.4.3 适用范围
跑台运动属于有氧运动的一种,对动物的益处是全身性的。因此,跑台运动可对研究全身器官的功能、疾病的预防和治疗有积极的作用。国内外有研究证实,长期中等强度跑台运动的益处包括延缓机体的衰老(Kim et al.,2010),减少肿瘤细胞的扩散和转移(Murphy et al.,2004),改善糖尿病患者的糖代谢和能量代谢紊乱(丛琳等,2001),以及明显减轻肥胖群体的体质量等(陈巍 等,2018)。相比中等强度跑台运动,高强度跑台运动对心肺功能有更明显的影响(Hafstad et al.,2011)。相比低强度跑台运动,高强度跑台运动对骨骼结构有更明显的影响(黄伟彦 等,2018)。
2.2 游泳运动
在游泳运动中,可通过改变持续时间和频率调整运动强度,还可将一定重量的负荷附加在动物的胸部或尾巴上来调整运动强度(Gobatto et al.,2001; Voltarelli et al.,2002)。采用游泳运动形式,也可以模拟人类运动的一些情况。本研究对游泳模型中通过调整参数所衍生的运动模型进行分别阐述。
2.2.1 运动性疲劳模型
有研究通过游泳训练建立运动性疲劳模型。具体方法如下:首先对实验大鼠进行3 天的适应性游泳训练,1 次/天,20 min/次。正式训练前7 天采取的训练模式为1 次/天,3 h/次,后3 天采取的训练模式为2 次/天,3 h/次,每次间隔时间为6 h。在游泳过程中,当大鼠出现反复下沉时,将其取出游泳池休息3 min 后,再放入游泳池中继续游泳,使其游泳时间不少于3 h(侯莉娟 等,2005)。采用该方法可以模拟人类运动性疲劳的状态。
2.2.2 力竭运动模型
一项研究通过8 周递增游泳训练建立了力竭运动模型。具体方法如下:正式训练采取5 天/周,1 次/天,第1 次训练10 min,此后逐日增加,1~3 周周末的时间分别为30、60、120 min/天。第4 周开始高强度训练:大鼠尾部增加0.5%体质量的负荷,120 min/天,第4 周周末增加重量达到体质量的1%,第5 周周末增加达到体质量的2%。第6周周末起每天上、下午各训练1 次,上午增加2%的体质量游2 h,下午增加3%~7%的体质量游2 h。如发现有力竭表现(在水下维持10 s 不能上浮),将其取出水面休息5 min 后继续训练直至2 h。第7~8 周时,夜间再训练1 次,同样增加3%~7%体质量的负荷,持续游泳至力竭,训练2 h,大鼠训练满8 周后,次日上午继续按第8 周安排方案训练,增加2%的体质量游完2 h (毛杰,2004)。另一项研究采取6 周的递增负荷建立力竭运动模型。具体方法如下:前3 周通过增加游泳时间来提高运动负荷(第1 周为5~30 min,第2 周为30~60 min,第3 周为60~120 min);后3 周固定运动时间增加负重(第4 周负重1%~2%体质量,第5 周负重2%~4%体质量,第6 周负重4%~6%体质量),6 天/周(佟强 等,2016)。由此可见,游泳训练也可以建立力竭运动模型。
2.2.3 过度训练模型
有研究采取8 周的训练建立过度训练模型。具体方法如下:前3 天适应性游泳30 min,并在1 周内增加时间至120 min,训练1周后,对大鼠进行力竭性游泳训练,1次/天,6 天/周,持续4 周。最后2 周,每天早、晚各1 次,每周6 天,对于在短时间内力竭的大鼠,捞出休息5 min 后再进行游泳训练,使训练时间不少于2 h(李宁川 等,2000)。还有研究采取6 周的训练建立过度训练模型。具体方法如下:在鼠尾部增加负重(体质量的50%),1 次/天,180 min/次,6 天/周,持续训练6 周(张志胜 等,1999)。游泳方式的过度训练模型也可以模拟人类的活动。
除了跑台运动模型,通过对参数的调整也可以建立不同的游泳运动模型(运动性疲劳、过度训练和力竭运动),两者之间的比较见表2。
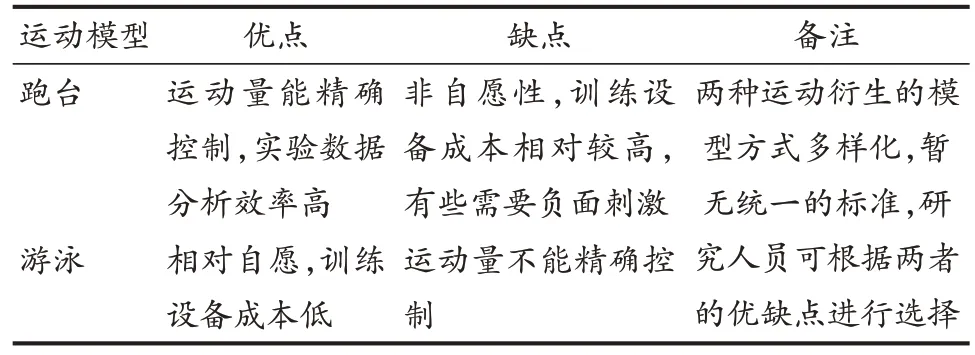
表2 跑台与游泳运动模型(运动性疲劳、过度训练、力竭运动)的比较Table 2 Comparison of Treadmill and Swimming Exercise Models (Exercise-Induced Fatigue,Overtraining,Exhaustive Exercise)
2.2.4 游泳运动模型的优缺点和适用范围
2.2.4.1 优点
1)鼠类具有先天的游泳能力,在进行游泳运动时一般不表现出强烈的抵触行为。2)游泳训练易维持较高水平的运动强度,而所需设备大多简便易得。3)可同时进行相对大量的动物训练,而不必依赖动物的自我激励。
2.2.4.2 缺点
1)由于缺乏分级的运动量,导致量化运动强度困难。2)水环境可能会给动物增加额外的压力,例如,与潜水有关的缺氧、不适感和溺水的恐惧,而低水温可能导致神经内分泌系统和血液动力学的变化(Kioukia-Fougia et al.,2002)。
2.2.4.3 适用范围
游泳运动属于有氧运动,不仅可以作为一种训练手段,还有利于疾病的恢复。例如,作为训练手段对骨骼适应性(步斌,2005)、骨骼肌适应性(黄文聪 等,2008)、心脏适应性(Wang et al.,2008) 以及大脑可塑性(马春莲 等,2018)等有作用;对多种疾病如抑郁症(Suvrathan et al.,2010)、高血压(Cardoso et al.,2014)、糖尿病(张坦 等,2016)和阿尔茨海默病(刘涛,2012)也有作用。
2.3 自愿转轮运动
有研究表明,使用能够自由转动的笼子,鼠类则会自发奔跑(Allen et al.,2001; Lerman et al.,2002; Swallow et al.,1998),在野生小鼠中也观察到这种行为(Meijer et al.,2014)。小鼠受玩耍、逃跑和代谢驱动而奔跑,这是有益行为,因此自愿转轮运动被研究者选为另一种运动模型。目前发现,小鼠自愿转轮运动的特征是间歇性的,类似于人类的间歇训练,因此可模拟人类间歇运动状态。
有研究发现,小鼠在黑暗周期开始后立即奔跑。奔跑活动在黑暗周期最初2~3 h 达到峰值,并逐渐降低(Bartling et al.,2017; De Bono et al.,2006)。目前发现,小鼠每天总跑步时间和总距离之间的差异可能受年龄、性别、品系和环境等影响。有研究进一步发现,不同品系的小鼠每天跑步速度和总跑步距离各不相同,其中C57L/J小鼠的跑动比其他品系快,因此在选择动物模型时要综合考虑品系运动差异(Lightfoot et al.,2004)。此外,雌性小鼠的每周跑步距离大于雄性小鼠,老年小鼠的日常活动明显少于年轻小鼠(Bartling et al.,2017)。研究还证明,小鼠较喜欢以 “巡航速度”(接近其最大速度)进行运动(De Bono et al.,2006)。因此,这种参数的统计结果可能优于传统方法(平均速度),而且还可以将跑步速度较快的小鼠替代跑步距离较长的小鼠 (Swallow et al.,2005)。
目前,在参数控制上,主要研究动物自愿转轮运动的长期效应,对运动速度和运动距离等指标一般不做干预,仅将运动的总持续时间作为控制因素(Allen et al.,2001),最大程度依靠动物的自愿进行运动。
2.3.1 自愿转轮运动模型的优点
1)运动方式类似于小鼠的自然跑步行为。2)可根据动物的正常昼夜节律在非应激条件下进行。3)不需要研究人员的直接干预,且易于长期实验研究。4)允许动物在笼内无应激的环境中活动,对技术要求需求较少。
2.3.2 自愿转轮运动模型的缺点
1)不同年龄、性别、品系的小鼠运动水平各不一致,对实验的结果也会产生不同的影响。2)除了饮食干预外,运动强度和持续时间不能精确控制。3)可能会折断脚趾甲或擦伤。
2.3.3 自愿转轮运动模型的适用范围
自愿转轮运动属于有氧运动的一种,通常适合研究运动的长期效应。例如,慢性适应性变化(Manzanares et al.,2019)、慢性疾病(Goh et al.,2013)、行为学研究(Bartling et al.,2017; Koteja et al.,1999)、认知功能(Lee et al.,2012)、心脏适应性(Konhilas et al.,2004)、骨骼肌适应性(Pellegrino et al.,2005)、肥胖症(Goh et al.,2013)、杜氏肌营养不良症(Call et al.,2010)、阿尔茨海默病(张楠等,2017)、抑郁症(崔建梅 等,2014)和中风等(Ke et al.,2011)。
2.4 举重运动
大鼠举重运动模式常用于研究长时间的耐力和力量训练下肌肉和骨骼变化。对动物而言,举重运动模式不是自愿的,需要通过一些刺激和奖励来促使动物运动。根据不同的诱导方式,可分为以下几种不同的举重训练模式。
有研究对大鼠下肢肌肉进行电刺激以使其抵住滑轮杆进行举重运动。在训练期间,对其采用低频重复、高训练负荷的训练方案。在给定的负荷下完成的动作连续3个训练阶段达到稳定水平,再以100 g 的增量逐渐增加,每次训练4 组,每组6 次。每隔20 s 重复1 次,每组之间休息5 min,共持续16 周。研究发现,受刺激的负重腿部腓肠肌湿重增加了18%。该模型为进一步研究举重运动引起骨骼肌增大提供了思路。这种模型的不足之处是使用电刺激诱导会不自主的使肌肉收缩,训练过程中大鼠的心理和精神创伤较大,并且实验数据的记录需要花费大量的时间(Wong et al.,1988)。另一项研究将双极电极植入大鼠颅内进行自我刺激来进行举重运动。大鼠穿着一定重量的外套,起始阻力为大鼠体质量的5%~10%。在随后的每个星期开始时,阻力逐渐增加。在训练期结束时,大鼠举起起始重量的550%以上。训练方案5 天/周,持续10 周。该模型将运动与积极激励相结合,具有相对容易实施且不会在动物体内产生任何明显的身体或精神创伤的优点,不足之处是大鼠需做开颅手术并植入电极(Garner et al.,1991)。
同上述举重运动中采用电刺激相反,在另外几种举重运动模型中产生了可长期维持的自发性肌肉运动。其中一项研究诱使大鼠抬起脚尖来得到头顶的食物进而完成一次训练。在36 周内,杠杆上的重量增加了85%。对于训练后大鼠的左右下肢比目鱼肌重量分别比对照组增加了31%和34%。同样,左右肢的足底屈肌也增加了24%。该模型的明显优势在于能够在训练后肌肉重量和张力产生变化。不足之处是大鼠必须在禁食保持饥饿状态才可能愿意进行训练(Klitgaard,1988)。另一项研究通过操作性调节程序和食物奖励来进行训练。为了保持目标体质量,要在笼子内调整大鼠标准实验室食物的每日定量。实验将大鼠分为负重70 g 组和700 g 组。在初步训练后,这些大鼠就能够通过其全部位移抬起负荷,并在数次连续的训练中保持稳定的速度(70 g 组中稳定在100 次,700 g 组中稳定在80 次)。大鼠进行了适应训练后,在之后的几周内,举重模式呈稳定状态。而且,这种模型是自愿和无创的,并且非常适合研究围绕重复性抗阻锻炼对生理的影响(Wirth et al.,2003)。还有研究作出进一步改进,该模型不使用禁食或电击作为锻炼的刺激,鼓励动物通过短期的能量限制和干扰刺激运动,而且这些刺激不会促进体质量的改变。此模型还将声音设备集成到调节过程中,可以优化运动学习的性能。动物的调整完全取决于光线、声音和气味的变化。并且可以准确控制运动变量(数量、强度和休息间隔),这种抗阻训练设备更接近于人类观察到的生理环境(Nicastro et al.,2012)。
2.4.1 举重运动模型的优点
1)与人类抗阻运动密切相关。2)运动变量比较容易控制。3)对研究骨骼肌(肥大、萎缩、代谢)方面起着必不可少的作用。
2.4.2 举重运动模型的缺点
1)非自愿运动,动物容易产生应激和不合作。2)可能需要负面刺激(禁食、电击)来维持运动。3)需要专用的训练设备。4)动物在训练前需要一定阶段的时间适应训练模式。
2.4.3 举重运动模型的适用范围
举重运动是抗阻运动的一种,重点研究其对骨骼肌和心脏的影响。例如,骨骼肌肥大(Tamaki et al.,1992)、心脏功能(Ahmadiasl et al.,2012)、心肌肥大(Barauna et al.,2007)。
2.5 爬梯运动
目前,已经开发出了若干动物模型用于抗阻训练,并旨在模仿人类抗阻运动中所表现出的骨骼肌生理效应(Klitgaard,1988; Tamaki et al.,1992; Wong et al.,1988;Yarasheski et al.,1990)。其中一些研究使用负面强化,如电击或禁食来激发动物运动(Klitgaard,1988; Tamaki et al.,1992)。而通过电刺激诱发训练可能会破坏结果的可靠性,甚至会阻止模型的成功执行。目前有研究证明了拒绝在跑步机上跑步且未经训练的老鼠会在梯子进行爬坡运动,且V˙O2与爬梯速度成线性关系。同时证明了爬梯是锻炼大鼠较好的方法之一,其依从率较高,可重复性强,并且在这种锻炼方式中会出现与人类相同的生理反应(Norton et al.,1990)。因此,研究人员开发了一种能够模仿人类渐进式抗阻运动的动物模型——爬梯式抗阻运动。
已有研究通过不同的爬梯运动模型训练大鼠后肢骨骼肌肥大和力量。一项研究训练大鼠爬上40 cm 的垂直梯子,同时逐渐增加固定在尾巴上的重量。训练持续26 周,4 天/周,12~15 次/组,4 组/天或一次训练重复4 组。大鼠最多可承受800 g 或其各自体质量140%的负荷。这种长期的抗阻训练可增强肌肉耐力和肌肉疲劳的抵抗力,但没有明显增加肌肉肥大,也没有增加趾长伸肌或比目鱼肌的最大力量(Duncan et al.,1998)。另一项研究则相反,正式训练前大鼠要在倾斜80°的梯子(长110 cm×宽18 cm)上进行适应性训练,3 次/天,共3 天。在此期间,将大鼠放置在梯子顶部的收容室内60 s,然后放在梯子的底部。在第二项实验中,将大鼠放在梯子的中间长度上。在最后一次试验,大鼠爬完整个梯子并记录了所耗费的时间。实验组接受负荷试验,持续8 周,每周5 次,将负荷50 mL 锥形管固定在大鼠的尾巴上。实验证明,渐进式抗阻训练的小鼠表现出趾长屈肌肌纤维肥大,并改善了海马依赖性记忆任务(Cassilhas et al.,2012)。与此不同,Hornberger 等(2004)采取高强度渐进式阻力训练,每3 天训练1 次,持续8 周。适应性训练3 天后进入正式训练,训练大鼠4~9 次爬梯,在最初的4 次爬梯过程中,大鼠分别承载了之前最大承载能力的50%、75%、90%和100%。在随后的爬梯过程中,逐渐增加30 g 的额外负荷,直至达到大鼠新的最大承受能力为止。研究发现,拇长屈肌(FHL)质量增加了23%,FHL的峰值强直张力增加了20%。组数、休息时间和训练频率与典型的人类抵抗运动训练计划非常相似,且观察到许多与人类进行性抵抗运动训练参数和生理适应性。
2.5.1 爬梯运动模型的优点
1)与人类渐进式抗阻运动密切相关。2)一般不需要负面刺激(电击)驱使动物运动。3)训练设备简便可得且成本较低。
2.5.2 爬梯运动模型的缺点
1)适应后可能对动物的压力较大。2)运动强度逐步加大,对动物产生心理和身体上的压力。3)训练过程中需要人工实时监测和记录运动量(表3)。

表3 爬梯与举重运动模型的比较Table 3 Comparison of Stair Climbing and Weightlifting Model
2.5.3 爬梯运动模型的适用范围
爬梯运动也是抗阻运动,研究多围绕对骨骼和骨骼肌结构和功能的影响。例如,骨骼生长(Ahles et al.,2013)、骨骼肌肥大(Hornberger et al.,2004)、认知功能(Cassilhas et al.,2012)和糖尿病(Sanches et al.,2014)。
2.6 电刺激运动
除了以上较为自然的运动模型外,还有研究者从电生理学角度开发了更为特殊的动物运动模型——电刺激运动模型。电刺激运动模型是指向肌肉内植入电刺激器从而导致非自愿的肌肉收缩(Ambrosio et al.,2012; Ljubicic et al.,2005)。在这种运动模型中,可以激活特定的肌肉群而不是整个小腿,并且由于该模型中有对照肌肉,因此可获得定量的结果(Baar et al.,1999)。
有研究发现,经过4 周的神经肌肉电刺激(NMES)后,鼠的强直性收缩增加了约30%。NMES 鼠模型可促进骨骼肌血管生成和增强,但不会引起骨骼肌损伤(Ambrosio et al.,2012)。另有研究表明,长期电刺激的作用与耐力锻炼并无不同,且电刺激模式避免了意志的局限性和生理性募集顺序。与经受相同的连续低频脉冲序列的肌肉相比,高频刺激模式的肌肉将具有更大的质量和横截面积,并产生更大的力(Salmons,2009)。
2.6.1 电刺激运动模型的优点
1)可用于控制对侧肌肉。2)定量且高度可重复的结果。3)不需要动物的配合。4)能最大程度地激活所有运动单元。
2.6.2 电刺激运动模型的缺点
1)需要手术和重复麻醉,可能会影响动物的生理。2)肌肉收缩不是生理性的,影响结果的可靠性。3)高频刺激肌肉纤维可能发生转变。
2.6.3 电刺激运动模型的适用范围
电刺激模式应用最多的是对骨骼肌的影响。例如,骨骼肌肥大(Baar et al.,1999)、肌肉功能(Pette et al.,1999)、肌肉损伤和炎症的恢复(Ambrosio et al.,2012; Ljubicic et al.,2005)、神经肌肉的疾病肌肉收缩等(Ambrosio et al.,2012)。
3 小结与展望
不同运动模型有各自的优缺点和适用范围,应进一步开发和改进各种动物运动模型,以实现高重复性和成本效益,同时节省研究人员的劳动力,这是目前亟待解决的问题。在选择和开发动物模型时,应牢记影响运动结果的多种因素。例如:动物的昼夜节律,负面刺激,动物品系、性别和年龄等。当前,还没有任何一种运动模型或任何一种运动方案能够对实验对象产生最优的效果,这需要研究人员对每种运动模型进行对比来调整运动方案,并不断改进运动模型,最终开发出能够模拟人类运动的理想化运动模型。
猜你喜欢
城市道桥与防洪(2019年5期)2019-06-26 00:56:04
中成药(2018年3期)2018-05-07 13:34:34
Coco薇(2017年8期)2017-08-03 16:11:23
岁月(2017年7期)2017-07-18 18:52:11
故事作文·高年级(2017年6期)2017-06-29 10:42:44
中国老年学杂志(2017年10期)2017-06-15 19:07:40
中国运动医学杂志(2016年3期)2016-07-10 12:07:23
电气化铁道(2016年4期)2016-04-16 05:59:46
红蜻蜓·低年级(2015年8期)2016-02-02 11:04:38
故事作文·低年级(2015年11期)2015-12-11 07:40:20