
无人机无人船协同测量作业技术研究
2023-06-06 03:27:00孙爱国熊荣军唐正涛何小丽
中国水运 2023年5期
孙爱国,熊荣军,唐正涛,何小丽
(1.长江航道勘察设计院(武汉)有限公司,湖北 武汉 430040;2.长江航道规划设计研究院,湖北 武汉 430040)
1 前言
《交通强国建设纲要》提出要推动交通发展由“依靠传统要素驱动向更加注重创新驱动转变”,对照高质量发展的根本要求,切实落实推动先进技术同长江航道测量作业的深度融合,紧跟无人技术装备进展,加快推进无人机、无人船技术在航道测量中的应用非常重要。近年来,无人机行业快速发展。传统的地形测量工作难度大,对人力物力的要求比较高,而选用无人机进行测量不但测量速度快,而且适应于许多复杂地形,所以当前地形测量开始由传统测量转为无人机测量;而无人船作为一个运载平台,可以在水域测量中承担很多高风险的任务,具有非常显著的安全及成本优势。随着无人机无人船一体化数据采集及融合的关键技术突破和应用案例逐渐成熟,无人机无人船协同测量作业、无人船集群协同引导、航道地物要素信息自动化提取等研究成为新的发展趋势。目前长江航道无人机、无人船整体应用水平仍处于起步摸索阶段,尚未形成体系,与国内外先进应用水平仍存在差距,应用领域和应用模式有待进一步拓展,为更好地发挥无人技术在航道测量中的应用效能,进一步深入研究无人机无人船的协同测量作业机制和作业模式具有较强的应用和推广价值,具有重要的现实意义和显著的经济社会效益。
2 无人机无人船协同测量的含义
本文研究的“无人机无人船协同测量”主要包括了3 个方面的协同内涵:
(1)利用无人机遥感数据提取的水沫线及临河建筑物边线为无人船快速规划测量计划线提供辅助边界条件,实现无人机与无人船测量作业之间的协同;
(2)利用无人船测量作业控制平台向多艘无人船进行测量任务的分配及调配,使多艘无人船按照指令各自同时开展测量作业,实现多艘无人船之间的协同测量;
(3)利用无人机的遥感数据和无人船的水深数据进行水陆一体化的成图,实现遥感数据和水深数据之间的协同。
3 研究内容
(1)应用基于无人机遥感数据的水沫线、临河建筑物等地物要素信息的自动识别和提取技术,开发数字航道条件下内业数据处理插件,提高内业数据处理效率。
(2)研究利用无人机技术辅助无人船规划航线,包括测区水沫线、障碍物等标注,规划精准、安全的航线。
(3)研究无人船内河航道协同作业控制技术,在一个平台上同时控制多艘无人船的操作,包括任务统一分配、航线统一规划等。
4 研究手段
4.1 地物要素信息的自动识别和提取技术
4.1.1 无人机遥感数据样本库构建
样本库制作通过对收集到的多源、多尺度的不同区域的无人机遥感数据进行分析处理,经过一系列的图像处理步骤制作多尺度标签标准数据集和遥感数据标准数据集,最终制作标准遥感数据样本库,并将其分为样本训练集和样本测试集两部分。无人机遥感数据样本库构建基于无人机正射影像和无人机倾斜影像实现,将目标地物要素按照水沫线和临河建筑物进行分类。正射影像作为一种数字测绘产品,同时具有几何精度、数学精度和影像特征信息量大,内容丰富,直观真实。无人机倾斜摄影技术通过在飞行平台上搭载多台传感器,同时从一个垂直、四个侧视等不同角度采集影像。相较于正射技术多了四个倾斜拍摄角度,从而能够获取更加丰富的侧面纹理等信息。

图1 无人机影像数据示意图

表1 航道地物要素主要类型
4.1.2 深度学习建成区自动解译提取
首先,利用高分辨率和对应的标记数据生成规定格式的样本训练集。然后,针对无人机遥感数据的特点,设计深度学习分割网络模型。利用第一步构建好的样本,对模型进行训练。利用样本测试集对完成训练后的模型进行测试,若测试不通过,则返回第二步修改网络模型,若通过测试则模型训练完毕,可以进行地物自动分割,提取地物要素边缘信息,具体流程如图2 所示。

图2 自动提取流程示意图
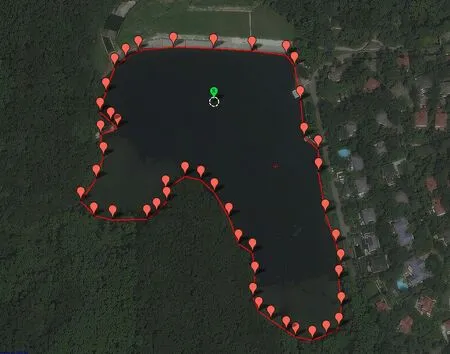
图3 测区边界线生成

图4 由导入的边界线生成无人船自动规划作业计划线
4.2 利用无人机遥感数据规划无人船作业计划线技术
4.2.1 导入通过遥感数据提取的KML 数据
通过无人机无人船综合管理平台,将KML 文件加载到无人船作业计划线规划软件中,生成水域测量边界线,再由边界线生成无人船自动规划作业计划线。
4.2.2 在控制软件上实现水岸线、障碍物标注,优化作业计划线
软件通过算法判断障碍物是静态障碍物或动态障碍物,并在地图上标注,为避障决策提供依据。
4.2.3 无人船智能避障技术辅助作业计划线优化
在无人船规划好作业计划线后,由于受到水位变化、临时障碍物等影响,给无人船协同控制调度带来难度。本项目将通过无人船集成毫米波雷达,为协同软件提供障碍物识别途径。
如图5,将多边形测区范围覆盖测量水域、水中岛屿及其他障碍物。在无人船下水后切换自动模式,例如船从Home 位置下水朝“1 号航点”位置航行,在毫米波检测到障碍物后,无人船向后面作业计划线方向转向绕过障碍物(此案例是向右转向试图绕过),当船连续遇到障碍物并到达下一条测线则判断为岸边,抛弃1 号航点去2 号航点,见图6。

图5 障碍物标注
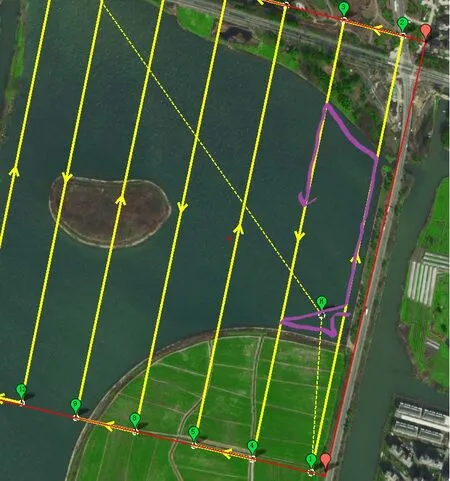
图6 作业计划线切换
若航向2 号航点遇到连续障碍物,且3 号也在障碍物测,则抛弃2、3 航点去4 号航点(如图5)。后续航行逻辑同上,无人船按照图6 跑作业计划线。若障碍物未覆盖到下一条测线,则绕过障碍物继续作业计划线,具体见图7 所示。
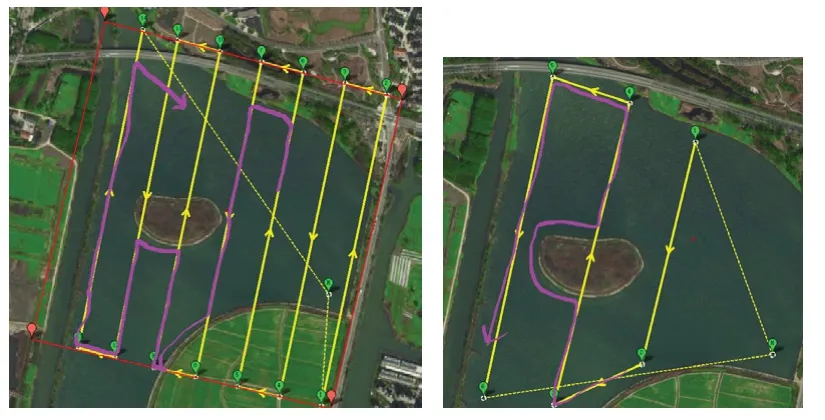
图7 作业计划线控制
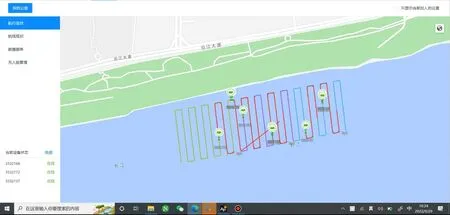
图8 无人船协同测量作业控制平台
4.3 无人船协同测量作业技术
平台基于无人机影像提取的水域岸边线,根据协同无人船数量将区域划分成多个小测区,分别将作业计划线分配给多条无人船。各区域无人船独自作业并将数据上传给管理平台。如有一艘无人船因故障等原因不能完成作业,重新将其区域内剩余任务划分给其他无人船继续完成作业。为保障协同服务器兼容多厂家的无人船数据接入系统管理,后续将制定标准的数据接入协议,具体内容包括:Sn 唯一识别号、无人船状态数据、无人船作业计划线规划、无人船指令控制数据、测量数据透明传输通道等,通过标准化的数据传输,实现不同品牌的无人船协同控制。
5 结论及建议
(1)在地物要素信息的自动识别和提取方面,目前基本能够实现自动识别和提取水沫线,但精度有待确认。下一步建议对洲滩、码头、航道整治建筑物、航标灯等的临河建筑物的信息提取增加样本学习数量,进一步测试和验证提取的效率和精度。
(2)在利用无人机正射影像数据规划无人船测量作业计划线方面,目前基本能够实现利用无人机正射影像数据提取水沫线,然后再利用水沫线规划无人船的作业计划线。下一步建议在水沫线提取的精度和速度方面进行进一步优化。
(3)在无人船协同测量作业方面,目前具备了多艘无人船分组测量功能。下一步建议进一步测试验证无人船之间的协同测量作业功能和智能再分配任务功能。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
岷峨诗稿(2017年4期)2017-04-20 06:26:43
留学(2017年5期)2017-03-29 03:03:54
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
水道港口(2014年1期)2014-04-27 14:14:38
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
水道港口(2013年3期)2013-04-27 14:14:28
