一种基于图像处理的水下小目标航迹自动跟踪方法*
2023-06-05 00:49金巧园代中华张国超
舰船电子工程 2023年1期
程 雨 金巧园 代中华 张国超
(中国船舶集团有限公司第七二六研究所 上海 201108)
1 引言
近年来,随着世界各国对水下攻防日益重视,兼具攻击性和隐匿性的无人潜航器、蛙人、鱼雷等各类小型水下武器飞速发展。水下武器能够摧毁舰艇、岸基,对国民财产和安全构成很大威胁[1]。因此,针对水下小目标的探测、跟踪、预警成为水下攻防的另一重点研究方向。
由于电磁波在水中会迅速衰减,水下小目标的探测主要依靠声波信号。声纳是一种利用声波在水中传播和反射特性,通过电声转换和信号处理技术对水下目标进行探测的装置。基于被动声纳的水下监控系统能够实时监测当前水域,探测、处理水下目标的辐射噪声,发现并持续关注目标,通过向用户发出预警信号,为水下攻防赢得宝贵的准备时间。传统的水下监控系统依赖人工参与,需要值班人员集中精力观察界面是否出现异常,长时间工作时精力难以集中,容易发生漏报误报。
为减轻水下监控系统操作人员的工作强度,本文以被动声纳输出的序列数据为研究对象,从图像处理角度提出一种水下小目标航迹自动跟踪方法,通过对声纳序列历程图像进行预处理、初始航迹检测、航迹跟踪等操作,实现声纳观测范围内水下小目标航迹的自动跟踪。
2 方法
2.1 预处理
水下监控系统的实际应用场景中,水文环境复杂,声纳接收到的声信号中不仅有水下目标,还包含水面航船、鱼群以及一些随机干扰噪声信号。这些背景噪声会对声纳产生干扰,使我们真正关注的水下小目标信号淹没其中。
图1是根据声纳输出的序列数据生成的历程图像,横轴表示角度,纵轴表示时间,左下角为坐标原点,星号标出的是本文要跟踪的水下小目标航迹。图中存在的环境噪声和其他目标航迹,会对后续航迹检测、跟踪产生不利影响,因此,首先要对声纳历程图进行预处理,减少干扰。具体处理方法如下。

图1 声纳序列数据历程图像
1)顶帽变换
顶帽变换是用原始图像减去该图像的开运算结果,数学描述如式(1)所示。通过选择结构元素的类型和大小,可以实现特定结构的提取[2]。
其中,f表示原始图像,S表示结构元素,° 表示形态学开运算算子。
本应用场景下,声纳接收到的目标信号在历程图上表现为暗背景下的亮轨迹。本文选择圆盘作为结构元素,效果如图2所示。综合考虑,结构元素大小选择2。顶帽变换操作可以滤除一些干扰对象,同时保留关注目标的信号。对比图2(a)、(c)可知,原始图像中水面船只引入的噪声被有效滤除。
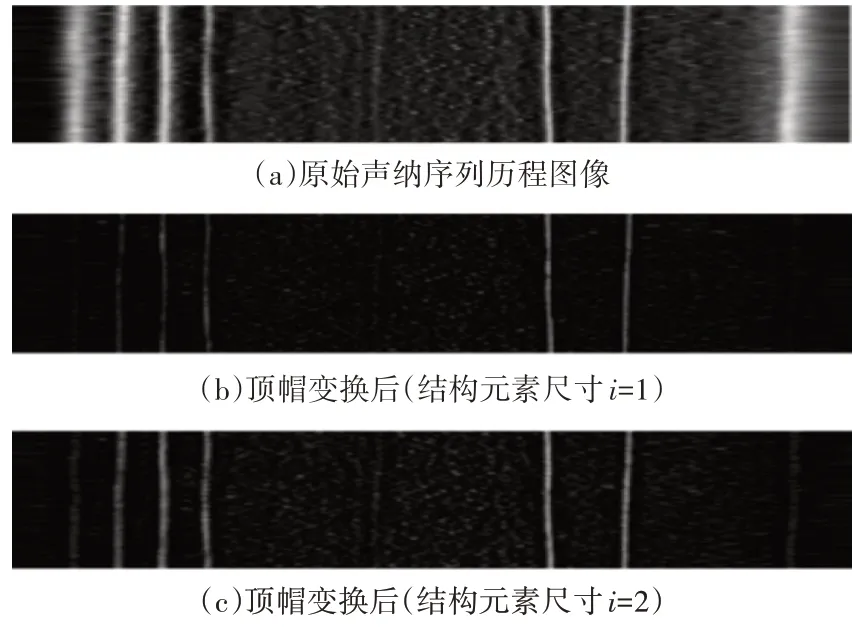
图2 顶帽变换效果对比图
2)二值化
二值化[3]是图像分割的一种方法,通过选取阈值H,将原始图像中灰度大于这个临界值的点赋值255,反之赋0值,最终得到一幅黑白两色的二值图像,数学描述如式(2)所示。
通过评估当前水域的环境噪声水平,可以得到分割阈值H,进而将目标信号与背景环境噪声分离开。图3是图2对应时间段的声纳能量序列历程图像,其中横轴表示探测角度,纵轴表示时间,像素点灰度值表示声纳探测信号的能量强度。

图3 声纳能量历程图
统计声纳能量历程图的直方图,结果如图4所示,其中纵轴表示该能量区间的像素数量。根据经验,我们认为背景环境噪声是图像中数量最多的像素,能量强度很低但不为0。因此,在前5 个等级中,选取出现频率最大的非零能量强度Enoise作为背景环境噪声级。

图4 能量强度直方图(level=25)
本应用场景下,以Enoise作为全局阈值,对顶帽变换后的探测历程图二值化,将目标前景和背景噪声分割开。效果如图5所示,可见,前景中除了目标轨迹还夹杂着较多细小噪声。

图5 二值化效果图
3)形态学滤波
形态学开运算是个基于几何运算的滤波器,通过利用结构元素,对图像先腐蚀后膨胀,消除前景中小物体的同时,平滑大物体边界且不改变其面积。数学描述如式(3)所示。
其中f 表示原始图像,S 表示结构元素,“°”、“Θ”、“⊕”分别表示开运算、腐蚀和膨胀算子。
本应用场景下,对探测历程二值图像进行形态学开运算操作,去噪效果如图6所示。与原始图像图2(a)相比,前景中的大部分干扰都已被消除。

图6 形态学滤波去噪效果图
2.2 初始航迹检测
真正的威胁目标往往是突然出现的,而持续存在的目标威胁等级通常很低。这些长期存在于探测环境中的目标,可称之为“背景目标”。为了方便区分背景目标航迹和突现目标航迹,我们需要在水下监控系统刚开机、搭载平台进行大幅度机动等探测环境发生较大变化的情况下,对当前水域进行一段时间的背景学习,检测背景目标产生的初始航迹。
霍夫变换[3]是一种经典的检测直线、圆等可参数化描述的简单几何形状的算法,它通过式(4),将笛卡尔坐标系一条直线上的观测数据()x,y 映射为霍夫空间中的极坐标点()ρ,θ,实现“点线转换”,在此基础上引入累加投票机制,即可实现对指定形状的检测[4~5]。
本应用场景下,对预处理后的探测历程图,利用霍夫变换检测初始航迹,效果如图7所示,可以看出,当前水域中有效背景目标的初始航迹基本都被检测出。

图7 霍夫变换检测效果
2.3 航迹跟踪
航迹是目标观测的集合。本节以T+1 时刻为例,通过一些目标检测方法,获取目标的最新观测。首先对过去一段时间内的声纳历程图预处理,初步提取当前时刻的m′个目标检测点;接下来通过设置能量信噪差阈值E,找出当前时刻声纳探测能量数据的局部极大值,最终得到m 个(m≤m′)目标检测点。
航迹跟踪[6~8]是对观测建立内部联系的过程,包括航迹起始、航迹更新、航迹终止。
1)航迹起始
航迹起始是航迹跟踪的第一步,其任务是建立目标航迹。
初始航迹的时间跨度小,可近似为直线,将其抽象为两个端点,建立起n 条起始航迹。后续通过检测获取目标观测,当观测远离现有航迹且无法与任意航迹匹配时,按孤立点迹处理,并将它作为某条新增航迹的头,如果后续有观测与之成功匹配,则认为该航迹正式起始。
2)航迹更新
航迹更新是对航迹动态管理的过程,包括航迹的预测、拟合和数据关联。
目标航迹G(t)由多个时刻的位置观测F(x),x=1,2,..,t 组成,航迹预测是指利用历史观测信息,推测目标在下一周期的位置P(t+1)。如果航迹中真实目标观测少于M 个,认为可靠性低,故在预测该航迹下一周期的位置时,保守地假设角度不变。当航迹中包括M 个及以上的真实目标观测时,认为该航迹可靠,可以依据历史观测信息预测目标后续的位置。
航迹拟合[9~10]是指拟合航迹的历史观测。水下小目标的运动特性可用式(5)的二阶多项式表征,在此基础上利用最小二乘算法对航迹历史观测数据做拟合,可求出二阶多项式参数,从而间接获取目标的运动速度和方向等信息;考虑到目标运动具有连续性,其位置和运动方向在相邻声纳输出周期内不会突变,故在此基础上可预测该航迹在下一周期的位置外推值。
这是个二阶多项式拟合模型,其中b0、b1、b2分别表示位移、速度、加速度相关的运动参数。
数据关联是指在前端检测模块给出目标最新位置观测的基础上,将观测与现有航迹进行匹配。基于探测环境未发生较大变化的假设,目标位置、运动方向和反射信号能量强度在相邻声纳输出周期不会发生突变,因此在数据关联时,可以引入距离约束和能量约束。
通过检测T 时间内的声纳探测历程数据,得到n 条初始航迹,即{G1(T),G2(T),…,Gn(T)};通过航迹预测,得到n 个T+1 时刻目标位置外推值{P1(T+1),P2(T+1),…,Pn(T+1)};通过检测T+1 时刻的声纳探测数据,得到m 个目标位置观测{F1(T+1),F2(T+1),…,Fm(T+1)}。计算航迹外推值和最新目标观测值之间的欧式距离,建立起一个n×m维的距离矩阵,并在此基础上进行数据关联[11~12]。数据关联算法的整体流程如下:
输入:当前时刻所有目标位置观测{Fi(t),i=1,2,…,m};
现有航迹G(t-1)的位置外推值{Pj(t),j=1,2,…,n};
输出:更新后的航迹G(t);
遍历前一时刻的所有航迹G(t-1);
遍历当前时刻所有目标位置观测F(t);
计算航迹外推值以及目标位置观测值与航迹外推值的欧式距离disti,j;
如果disti,j>distMin (distMin 为最小距离阈值),跳过;
否则,记录满足空间距离要求的目标观测;计算满足空间距离要求的目标观测数量Q;
如果Q=0,用外推值Pj(t)作为当前观测,进行航迹更新;
如果Q=1,用观测Fi(t)对当前航迹进行更新;
如果Q>1,选择其中与航迹外推值Pj(t)能量值最接近的观测,对当前航迹进行更新;
遍历当前时刻所有目标位置观测F(t);
如果未与现有航迹成功关联,且与所有外推值的距离大于distMin,则增加一条临时航迹,并将该观测作为新增航迹的起始点;
3)航迹终止
当航迹可靠性较低时,及时终止航迹可以避免出现误报。以下几种情况,需要终止航迹。
(1)航迹预测过程中,使用二阶多项式模型拟合航迹历史数据,并预测下一周期的位置外推值。如果位置外推值与航迹最新位置相距较远,则航迹终止。
(2)数据关联过程中,每次使用外推值代替目标观测进行更新时,航迹的置信度都会下降。如果连续N个周期都未与目标观测成功关联,则航迹终止。
3 实验
3.1 效果展示
为验证本文所提方法的有效性,按时间顺序对图1中的声纳序列数据进行处理,文中提及的各参数设置如下:背景学习周期T=20,目标观测个数M=3,能量信噪差E=5dB,外推周期N=5,最小距离阈值distMin=4。航迹跟踪效果如图8(a)所示,其中,同一种颜色标绘的连续曲线表示同一航迹,每条航迹的起点和终点都用白色“x”号标注出来。图8(b)在原始航迹跟踪结果基础上,剔除了从开始时刻就存在于背景环境中的初始目标航迹,只保留威胁等级高的突现目标。本文方法不仅实现了特定水下小目标航迹的完整跟踪,且没有出现虚警。
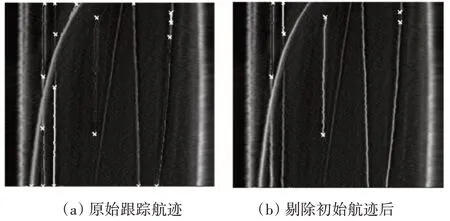
图8 航迹跟踪效果
3.2 对比实验
1)图像预处理
预处理环节,起到的是降低噪声、减少干扰的作用。图9展示了有无预处理环节条件下航迹跟踪的结果,可以看到,去掉预处理步骤后,虽然实现了特定目标的航迹跟踪,但在原有基础上增加了10 条无效航迹,该对比实验证明了图像预处理环节的有效性和必要性。
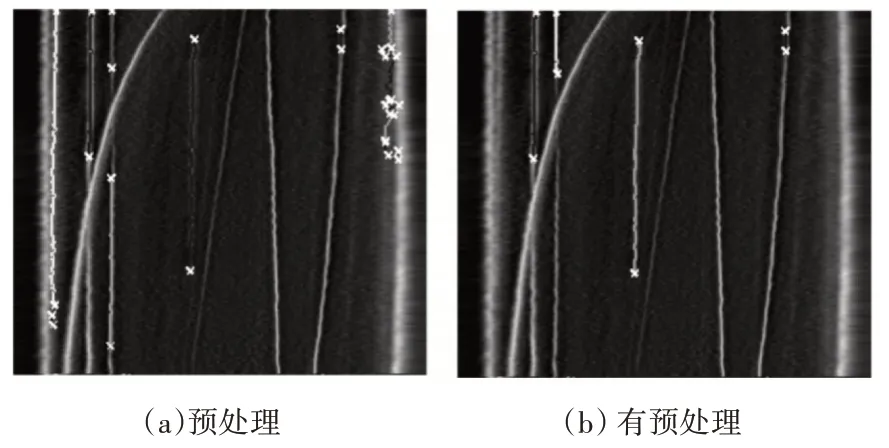
图9 预处理环节的影响
2)能量信噪差
设置能量信噪差阈值,是为了在目标检测时进一步剔除观测中存在的噪声,增加航迹的可靠性。图10展示了设置与未设置能量信噪差条件下航迹跟踪的结果,可以看到,通过设置能量信噪差阈值,减少了很多虚警,证明了本文所提方法的有效性。
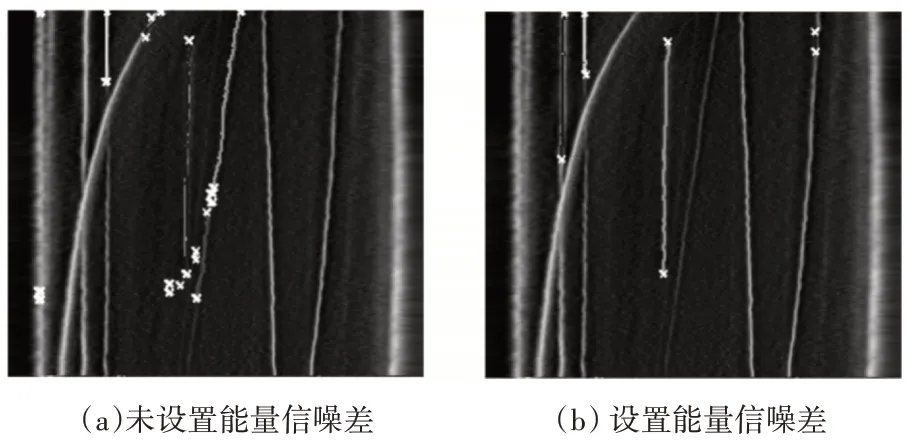
图10 能量信噪差阈值的影响
4 结语
本文从图像处理的角度,提出一种水下小目标航迹自动跟踪方法。该方法能够依据声纳输出的序列数据,实时、自动地跟踪重点目标航迹,其有效性在真实数据上得到了证实。不过方法仍存在不足,后续需要围绕以下几点进行改进:
1)针对多条航迹交汇点附近会出现匹配失败的问题,要通过加强约束来优化数据关联过程;
2)在将来的研究中,可通过进一步挖掘水下小目标的其他图像特征、结合综合态势信息来提升航迹自动跟踪性能。
猜你喜欢
党员文摘(2022年14期)2022-08-06
党员文摘(2022年7期)2022-04-28
党员文摘(2022年1期)2022-02-14
党员文摘(2022年3期)2022-02-12
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
青年歌声(2019年12期)2019-12-17
电子测试(2018年14期)2018-09-26
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16