
基于车路云协同的智能网联汽车研究态势*
2023-06-05 06:05贯怀光郭蓬张登权王庆闪夏海鹏
汽车文摘 2023年6期
贯怀光 郭蓬,2 张登权 王庆闪 夏海鹏
(1. 中汽研(天津)汽车工程研究院有限公司,天津 300300;2. 中国汽车技术研究中心有限公司,天津 300300)
缩略语
ICV Intelligent and Connected Vehicle
C-V2X Cellular Vehicle-to-Everything
OBU On board Unit
RSS Road Side Server
5GS 5G System
5GC 5G Core
RSU Road Side Unit
AMF Access and Mobility Management Function
NEF Network Exposure Function
PCF Policy Control Function
SMF Session Management Function
NRF Network Repository Function
NWDAF Network Data Analytics Function
UPF User Plane Fuction
UE User Equipment
CAN Controller Area Network
MEC Mobile Edge Computing
ES Edge Server
HPPS High Precision Positioning System
GNSS Global Navigation Satellite System
IMU Inertial Measurement Unit
VSL Variable Speed Limits
GA Genetic Algorithm
DOA Dingo Optimization Algorithm
IMFAPC Improved Model-Free Adaptive Predictive Control
TD-ISAC Time Division Integrated Sensing and Communication
0 引言
汽车产业正迎来新一轮颠覆性变革,汽车“新四化”是未来的发展趋势,汽车智能化是未来汽车发展的战略方向[1]。汽车产业先进技术、软件系统、信息传输等技术的快速迭代发展,以及国家鼓励智能网联汽车公共蜂窝车联网(Cellular Vehicle-to-everything, C-V2X)相关技术研发与创新,促进了智能网联汽车(Intelligent and Connected Vehicle,ICV)行业迅速发展[2-5]。然而,目前智能驾驶辅助系统的国外供应商市场份额占比高达80%,国外ICV 技术仍处于垄断地位,而国内如地平线、黑芝麻、寒武纪公司自主研发的控制器、芯片普遍与国外还有较大的差距,ICV系统技术发展尚不成熟,仍存在“卡脖子”的技术瓶颈。
为了打破国外垄断格局,弥补我国低速智能网联汽车产业链短板,优化智能驾驶算法,提升软件开发、应用能力都很重要,需要在软件算法上进行攻关和突破。在探索具有中国特色的智能网联汽车发展道路进程中,智能网联车路云协同技术是5G 技术在汽车领域最有潜力的应用。中国将重点打造智能网联汽车、信息技术等产业链集群,打通智能网联汽车产业链上下游,推动行业高质量发展。
从智能网联车路云协同的技术层面分析,现有的单车智能技术方案存在着感知范围有限、车间存在博弈与冲突、难以实现全局路径规划的问题。传统车路云协同主要是强调车与路侧设备之间的协同机制,提供车与车、车与路之间有限、单一的信息决策服务,应用场景和服务能力有限,难以实现大范围的群体协同与决策,不能满足ICV 参与交通系统在发展过程中对全局车辆交通管控与优化的实际需求[6]。
从产业环境层面分析,智能网联汽车技术算法更新和迭代离不开道路、通信基础设施的优化建设,但目前基础设施因企业根据自身项目需求进行建设,导致资源冗余、通信协议复用、难以互联互通、利用效率低,智能网联汽车应用技术标准、运营标准缺乏协同,制约其进一步落地发展。
要解决技术短板和配套设施不完备、产业链上下游断裂的问题,基于“人-车-路-云”统筹规划的系统协同架构,从系统协同方面重构智能网联汽车,打通智能网联汽车的智能化交通基础设施、通信网络基础设施、计算服务技术链。以融合实时云计算为主要技术,以数据可靠、网络安全为主要技术特点,提升道路交通的综合通过能力。
因此,本文分析智能网联车路云协同系统架构技术的最新发展态势,聚焦车路云协同系统框架以及3 大关键技术,提出ICV 系统发展面临的挑战和前进方向。
1 智能网联车路云协同系统框架
1.1 车路云协同融合整体框架
智能网联汽车结合C-V2X 网络与道路、路侧设施、智能网联汽车云有机结合形成新型车路云融合系统[7]。图1所示为智能网联车路云协同系统框架。智能网联车路云协同场景可以分为车辆队列协同控制和空地联网协同控制。
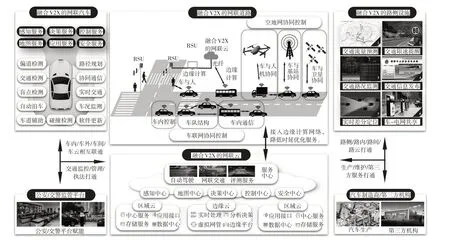
图1 智能网联车路云协同系统框架
在组网和控制场景中,车辆队列协同可以根据协同控制的不同方面分为车内协同、车队结构协同和车间通信,具体阐述如下:
(1)车内控制是指通过分布式控制器实现车辆之间合适的车速和车间间距。
(2)车队结构是指队列中车辆之间队列保持稳定性以及一致性。
(3)车间通信考虑多传感器车载网络拓扑结构的多边特性。
空地联网协同控制是指车与无人机、基站、卫星之间协同。
智能网联汽车云通过“6 大中心”来集成车辆、道路及汽车制造商或第3方平台,以及公安、交警监管平台各种资源数据,构成C-V2X技术融合的车路云协同应用服务核心,“6大中心”分别为:
(1)感知中心
主要是对行驶过程中的智能网联汽车进行信息采集,对车辆状态进行检测。
(2)地图中心
主要为车辆产生高精度的地图定位实时信息,全局、局部动态路径规划信息和交通信息。
(3)决策中心
主要为车辆进行决策和规划,当车辆出现故障和行驶环境恶劣情况下,提升车辆行驶和交通运行的综合性能,确保安全行驶。
(4)控制中心
主要是依据感知和地图中心信息控制驱动。
(5)服务中心
主要是进行车载可视化,让用户享受个性化的交通信息服务。
(6)安全中心
主要是保证汽车组网安全、数据与接口安全、系统平台安全。
车路协同端对端解决方案总架构可划分为4 层结构(图2),其总体目标是能够实现车辆和道路之间及时信息交换,进而为自动驾驶和其它应用场景提供支撑[8],车路协同端对端解决方案总架构4 层结构具体为:

图2 C-V2X车路云协同解决方案总体架构
(1)终端层中,车路协同中遵循同一个标准,ICV 内需要集成C-V2X 模组(On Board Unit,OBU),以获得车载通讯能力,并且结合车身传感器,使路侧单元(Road Side Unit,RSU)与行驶车辆进行通讯。
(2)边缘层中,路侧服务器(Road Side Server,RSS)进行路侧融合、感知,提供交通预警和其它行车风险预警,边缘计算平台承担高精度定位所提供的差分信息采集任务。
(3)云端层,提供基础服务,包括车路云协作数据采集、路由分发、车路云协同数据运用,使得汽车交通管控大脑功能极大增强。
(4)应用层,实现各类数据使用单位之间衔接和执行,为交通信号优化、诱导和控制提供服务。
1.2 车路云协同5G-V2X应用架构
面向车路云协同的智能网联5G-V2X 应用架构如图3 所示。采用5G 系统能够提供良好的动态资源配置与调动功能,使用5G 网络提供V2X 应用发布与差异化通信服务,实现集成V2X的感知决策控制组网一体化功能[9]。5G-V2X 应用系统架构(5G System,5GS)主要是由5G核心网(5G Core,5GC)、RSU和路侧基础设施以及车辆构成。其中,5GC是由访问和移动管理功能体(Access and Mobility management Fuction,AMF)、网络开放功能体(Network Exposure Function,NEF)、策略控制功能体(Policy Control Fuction,PCF)、会话管理功能体(Session Management Fuction,SMF)、网络存储数据库功能体(Network Repository Function,NRF)、网络数据分析功能体(Network Data Analytics Function, NWDAF)以及用户面机制(User Plane Fuction,UPF)网络功能体组成。

图3 5G-V2X车路云协同应用架构[2]
5GC 网络功能使用功能体提供服务接口进行交互(Namf,Nnef,Npcf等),车路云协同的智能网联汽车内置的用户设备(User Equipment,UE)应用之间采用V5 接口进行本地数据交互传递,并且利用V1 接口和V2X应用远程服务器进行交互。
其中在架构中,车载通信分为车-车之间通信和车外通信2个部分。
(1)车-车之间通信系统包括技术平台、控制器域网(Controller Area Network,CAN)网关、传感器可视化平台、地图信息和集成化车载单元OBU接口。
(2)车外通信实现“人-车-路-云”之间的通信服务,通过串口或以太网接口协议进行信息交换。
2 车路云协同平台关键技术
2.1 智能网联汽车V2X通信技术
智能网联汽车通信协议可以为车路云协同系统的运行稳定性提供重要支撑。在智能网联汽车V2X通信系统中,每辆车定期广播其链路状态消息,产生的流量与运行车辆成正比,当车辆流量密度增加时,易导致车辆局部V2X 通信失败。在V2X 通信技术中应聚焦无线网络流量之间的控制研究,对各个运行环境的流量进行调节和动态更新,可便于缓解V2X信道之间流量阻塞。
Rahim等[10]提出了一种内容缓存协议。所提出的协议使用背包优化算法根据其效用将可变大小的内容分配给RSU。结果与市场匹配和随机缓存相比,所提出的协议分别提高了约13%和70%的数据下载量。Yu 等[11]提出了基于车辆间通信技术的队列控制优化跟驰模型。优化模型可以提高车辆跟随的稳定性和安全性,降低车辆总油耗。Hou 等[12]基于C-V2X 智能融合网络提出了边缘计算(Mobile Edge Computing,MEC),为了降低问题的复杂性并提高求解效率,提出了启发式算法,从延迟感知、适用性评估和空间聚类方面实现了C-V2X中边缘服务器(Edge Server,ES)的联合分层放置和配置。但是,ICV不能直接应用于CV2X。需要进一步研究C-V2X通信中的信道模型、控制元件的输入以及车辆密度之间的耦合关系,以重新定义ICV应用场景。
2.2 智能网联汽车定位与融合技术
高精度定位系统(High Precision Positioning System,HPPS)是智能网联车路云系统能力提升的核心,也是确保自动驾驶精准位置定位的重要技术。当前主流技术主要分为:多卫星定位、蜂窝定位、局域网融合定位和智能传感器定位。
(1)多卫星定位,通过获得多地图的定位数据和全球导航卫星系统(Global Navigation Satellite System,GNSS)实现定位。单系统的定位精度通常可以达到米级,但实际定位结果偏差较大,无法满足车道级定位与导航要求。
(2)蜂窝网络定位通过移动通信基站信号时间差来计算车辆所在的位置,终端计算蜂窝网络定位精度取决于定位区域基站数量与分布。
(3)局域网定位是通过测量待定位节点的已知信标节点的电波信号强度特征,依据局域网接收信号到达的时间、时间差、强度信息,推断定位节点的位置。
(4)智能传感器定位有利于智能网联汽车定位在全路况场景上的应用。通过如惯性测量单元(Inertial Measurement Unit, IMU)得到运动体之间的速度与位置信息,表1 是智能网联汽车常用定位技术比较。

表1 智能网联汽车常用的定位技术比较
国内外学者对智能网联汽车定位与融合技术开展了大量研究,Wang等[13]提出一种智能网联环境下的可变限速(Variable Speed Limit,VSL)控制方法,使用总通行能力、总行程时间和总速度差构建多目标函数,控制方法具有较好的控制效果。Chen等[14]提出了一种以深度Q 学习(Deep Q-Learning,DQL)为对象的网络分布式计算卸荷策略,以找到最佳卸载方法,充分利用周围车辆计算资源,减少计算复合任务执行时间。Tong等[15]通过系统车载总线和其它传感器,实时采集智能网联汽车运行时有关数据,并传输至监控平台,以监测道路上的ICV,判断每辆车的行驶状态。同时,在监控平台上建立免疫算法模型,对行驶车辆的行驶状态进行评估,发现不安全状态时及时预警。Wang 等[16]提出了一种基于5G、C-V2X、卫星导航定位、融合感知技术的商用车车路协同系统。Suseendran等[17]使用支持向量机学习对给定的信息及其偏差进行反复分类。该信息通过减少近似误差和复杂性来提供智能网联汽车的准确定位和跟踪。Mo 等[18]提出了协同自动驾驶系统的车基协同感知框架,改进了传统的卡尔曼滤波器,即使车辆在路边故障时也能输出位置信息。
2.3 智能网联汽车测试与评价技术
ICV 车路协同测试通常包括可预测全部场景的虚拟仿真测试、可覆盖典型和极限场景的封闭场景实车测试和主要覆盖典型场景随机组合的开放道路测试,以验证智能网联汽车应对有限和随机场景的能力。在测试过程中,首先开展智能网联汽车性能测试,稳步扩展到高速公路、封闭园区和城市道路下的车路云协同服务测试[19]。
Sun 等[20]基于车辆动力学的状态空间方程,探索和识别主动避撞的安全域。建立模型预测控制器,在复杂交通场景下,测试所提主动防撞控制策略的功能,提高自动驾驶效率和道路交通安全。Li 等[21]建立了考虑动态交通流下交通要素、车辆状态和驾驶员行为的驾驶风险场模型,分析了驾驶风险场模型中各参数的影响因素,提高智能网联汽车动态行驶安全性和自主决策能力。表2 是国内外测试软件比较。Mao 等[22]采用微仿真软件VISSIM,基于遗传算法(Genetic Algorithm, GA)模拟驾驶员通过工作区时的行为,提升高速公路维护运营效率和安全。Li 等[23]基于车辆群行为,对面向智能网联汽车的主动交通管理控制进行了仿真研究。用研究数据对城市快速路交织区交通流车辆驾驶行为进行了VISSIM 模拟。研究成果可以优化车道管理,缓解高速公路交通拥堵。Shi等[24]基于强化学习框架,根据城市无信号交叉口设计强化学习状态、动作和奖励,让车辆以适应人类驾驶汽车的方式安全地通过交叉路口。

表2 国内外常用的智能网联汽车测试评价软件比较
在自动驾驶仿真方面,高性能和高保真的智能网联仿真软件主要是商业化应用,并且进行接口和界面封装,用户根据自身需求定制化程度较低,只能按照软件设定的规范场景进行测试验证。目前,大约80%的算法目标测试场景是通过仿真系统构建,自动驾驶仿真平台的高效性和可靠性关系到自动驾驶未来的应用场景[25]。大多数仿真软件用于对单车和虚拟交通环境进行模拟,但缺少在车路云协同真实交通环境下,对自动驾驶性能进行系统研究。
网联测试主要以测试为主,Wang等[26]提出耦合车辆模型的事件触发框架,所提出的预测方法可以在通信速率和估计性能之间取得有效的平衡。Song等[27]提出了一种使用多通道的多跳传输协议技术,提高通信网络的可靠性和延迟时间。Pari 等[28]使用野狗优化算法(Dingo Optimization Algorithm,DOA)优化车辆之间的路由通信,以实现通信的可靠性,增加了吞吐量和数据包传递率。最后,通过执行混合波束成形增强了通信可靠性,还利用了基于多智能体的分类深度Q 网络,提高频谱效率。Yu 等[29]提出一种无模型自适应预测协同驾驶(Improved Model-Free Adaptive Predictive Control,IMFAPC)改进方法,该方法能够缓解时变延迟和随机丢包对控制效果的不利影响,从而在基础上提高各种流量下的流量效率,确保多车行驶安全。Shen 等[30]提出了物联网辅助创新数据完整性验证方案IoT-IDIVS,以整合交通系统数据并有效地交换信息,丢包率为21.3%,平均服务时延为26.9%。Zhang 等[31]提出了时分集成传感与通信系统(Time Division Integrated Sensing and Communication,TD-ISAC),提出的通信模式选择算法同时通信吞吐量保持在2.2 Gbit/s以上,可以有效地最小化不同条件下的响应时延。
综上,文献中主要测试指标如表3所示,ICV车路云协同系统中典型测试场景可根据道路类别、自动驾驶业务场景、测试数据和通信对象分类,主要指标包括时延、丢包率、吞吐量、通信范围、数据包投递率、接收信号强度。

表3 文献主要测试指标
3 结束语
本文针对智能网联汽车领域中车路云协同系统技术发展不完善,导致智能网联汽车在车路云协同方面的应用和运营标准存在不足的问题,分析智能网联车路云协同系统框架和应用架构研究现状。通过重点分析车辆无线通信、融合和定位、测试和评估关键技术,表明未来智能网联汽车需要在与自动驾驶等级相结合的新型“人-车-路-云”框架内,在车路云协同控制模型方面实现重大突破。
本文首先建议解决车队协同控制中,保障控制层通信安全的问题。为了解决该问题,需要研究在复杂场景下,采用高可靠通信和智能算法推荐技术,并考虑安全互信认证技术需要满足区域范围、网络高频接入问题,以提高智能网联车路云协同系统的稳定性和保密性。其次,智能网联车路云协同系统中的组网架构需要融合智能网联汽车、智能网联道路、智能网联云和路侧设施服务模型,这可能导致信息设备研发企业推出的软硬件接口和交互机制出现差异,因此需要加速推进新型V2X 融合的终端、云控、路面基础设施和标准化,全面联动融合产业发展。
此外,智能网联车路云协同技术将在相当长的时间内采用分区域、分阶段的解决方案,各个阶段之间需要考虑通信、计算技术约束。因此,未来需要部署相应的边缘计算和存储方案,以满足新场景下协同和固定场景下不同网络架构之间的联动需求。
最后,未来需要考虑智能网联汽车网络拓扑的动态变化,通信节点之间信号高速切换时,伪造节点的恶意攻击会导致巨大的安全风险。本文建议加强安全方面的研究,以提高整体安全互信认证技术的升级投入,以提高ICV系统的稳定性和保密性。
猜你喜欢
科学大众(2020年23期)2021-01-18
工业经济论坛(2020年6期)2020-04-13
汽车观察(2019年2期)2019-03-15
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
中国交通信息化(2018年12期)2018-03-21
中国卫生(2016年5期)2016-11-12
现代制造技术与装备(2015年4期)2015-12-23
生物进化(2014年2期)2014-04-16
