
基于计算机辅助技术的手工艺品设计与研发
2023-06-03 07:57徐磊陈洁馨
长沙大学学报 2023年2期
徐磊,陈洁馨
安徽新华学院大数据与人工智能学院,安徽 合肥 230088
手工艺品凝结着特殊价值观念、区域文化、风土民俗元素,极具审美意蕴,能满足人们日益增长的审美需求。当今的工业设计品除需要技术支持之外,还要能为设计注入灵魂[1]。传统手工艺品研发依赖人工测量、手绘图纸等方式,不仅工作量大,而且效率较低,为优化手工艺品设计效率与效果,创作出具有时代感的作品,可将手工艺品研发设计与计算机辅助技术相结合[2]。基于三维激光扫描技术获得手工艺品物体的三维数据信息,传输到计算机端进行点云数据预处理、边缘提取、曲面重建处理[3],获得接近原手工艺品的三维物体模型,在此模型基础上,进行手工艺品的艺术加工与再创造[4]。边缘提取过程中应用改进的Canny 边缘检测算法,基于自适应重采样技术实现曲面重建,基于计算机辅助技术提高手工艺品三维模型重构的精度与效率。
1 基于计算机辅助技术的手工艺品设计方法
1.1 手工艺品三维数据采集
使用三维激光扫描仪获取手工艺品的三维点云数据,仪器数据采集基于激光三角法测距实现,扫描区互不重叠,扫描覆盖范围可达120°。最终获取的手工艺品三维点云数据量较大,需要进行分割精简。
点云分割将手工艺品初始点云数据划分为数个子数据集,将三维无序点云数据聚类为有意义的局部结构。子数据集是全部点云数据的总和,子数据集间没有重叠部分,分割后的点云数据便于三维重建应用,减少冗余点云的干扰[5]。我们使用k-means 无监督学习聚类算法分割初始点云数据,基于相似性阈值与最小距离法划分点云类别,实现大规模点云高效分类。
定义n表示手工艺品初始点云数据总和,{q1,q2,q3,…,qn}表示样本数据集合,每个qi为d维向量,则存在qj={qj1,qj2,qj3,…,qjn}T。基于k-means 算法将点云数据分割为三块,因为点云数据是三维向量,所以数据块数量K取值为3,任意选择K个数据为原始聚类中心,将数据点分配至与其距离最小的类别内[6],然后计算最小值:
公式(1)中,CK、χK分别表示K个点云类别样本集合及其内部全部样本qj的聚类中心,则有样本数量d(qj,χK)。计算全部样本与聚类中心之间的欧几里得距离:
计算聚类中心:
其中,χK类别中样本数据数量用qj描述,其数量用nK表示。
基于k-means 算法可快速获得有效的点云数据分割结果。
1.2 基于改进Canny 算法的手工艺品轮廓信息提取
手工艺品三维数据采集完毕,需要精准提取手工艺品边缘轮廓信息并实施精准测量,以构建准确的物体模型,实现有效手工艺品再创造。对此,本文基于Canny 算法提取手工艺品的轮廓并将其转换为矢量数据,结合分割后的点云数据实施手工艺品点云提取与测量。本文研究改进传统Canny 边缘提取算法,着重对Canny 算法的梯度幅值与梯度角度求取、边缘点筛选策略进行优化。
1.2.1 梯度幅值与梯度角度计算改进
对采集的初始点云数据实施预处理,降低数据噪声点,作为轮廓提取的样本数据。在手工艺品三维轮廓边缘提取部分,参考索贝尔算子边缘提取原则,在Canny 算法的梯度幅值和梯度角度计算过程中引入45°、135°方向梯度运算模板[7],考虑更多方向上梯度的计算,以提高边缘检测的精度。图1 是新加入模板的运用原理。

图1 Canny 算法优化后模板样式
参考段锁林等的研究,结合图1 模板优化内容求取x方向、y方向、45°方向、135°方向的梯度幅 值,分 别 为Hx(i,j)、Hy(i,j)、H45(i,j)、H135(i,j)[8]。此刻像素点灰度值位于水平方向与垂直方向上的梯度可根据以上4 个梯度信息计算得到:
由此计算得到此刻像素点灰度值梯度幅值与角度值:
以上引入45°、135°方向的梯度模板策略可直接获得像素点梯度信息,兼顾了8 个邻域范围中的梯度表现[9],梯度计算数据更加充分,使三维边缘检测精确度有所保障。
1.2.2 基于边缘连接算法的边缘点筛选
Canny 边缘检测算法一般采用高低阈值预设法筛选边缘点,该方法可以良好消除三维扫描产生的边缘噪声端信息,对变化不显著的边缘灰度低阈值却难以确定。为避免此缺陷,我们通过边缘连接算法来筛选边缘噪声信息。
对三维激光扫描采集的全部点信息实施遍历,找出断裂边缘端点和边缘连接方向。边缘连接的位置基于端点同待连接点特征、连接方向梯度值上限两个指标来判断[10],操作过程如下。
(1)查找全部断裂的边缘端点,将8 邻域中存在一个或两个相邻点的边缘点标记为端点。
(2)边缘连接方向基于端点同相邻点的法线确定,8 邻域以法线为介质被划分成3 个部分,边缘连接方向就是不带有相邻点的部分。图2 是连接方向。其中,点D包含一个上端像素点,那么1、2、3、4、5 即该点的边缘连接方向[11]。

图2 边缘连接方向
(3)依次求取连接点的梯度幅值与梯度方向,连接点符合以下条件:梯度方向与法线之间夹角不大于45°、梯度幅值是5 个待连接点中的最大者。
(4)以完成的一次连接为前提,获取“端点”(连接的点),重复执行该步骤,停止的条件有两个:一是连接点与另一边缘相邻;二是连接至图像边界。
(5)没有连接点待连接时,标记检索完毕的端点D,回到第(1)步,遍历完全部端点时终止。
基于改进Canny 算法提取手工艺品的轮廓,将其转换为矢量数据,提供精准的手工艺品规格参数,作为手工艺品三维建模的基本信息。
1.3 基于自适应重采样的手工艺品曲面重构建模
计算机技术辅助下的手工艺品设计对物体曲面网格重建质量要求极高,直接决定了手工艺品模型重建的可视化水平与精准度。为此,我们从两个角度约束曲面生成的质量:一是调节采样点疏密程度以改进自适应重采样算法,实现曲面自适应三维网格生成;二是引入三角形美化度函数,确保生成的三角形形态良好,减少曲面重建的孔洞数量。
1.3.1 基于加权CVT 的曲面网格自适应重采样
基于加权CVT 法进行曲面网格采样前,构造密度函数修正控制采样点的密度,确保较小的细节区域完整保留,进一步基于加权CVT 自适应采样曲面网格点,步骤如下。
(2)B为计算得到的BG每个区域重心点,定义Ai为其中一个区域,该区域的顶点及顶点密度值分别用、表示,k=1,2,…,m。为Ai的质心点,计算方法如下:
(3)在iθ′ 位置放置θi。
(4)基于CVT能量函数与点集B计算能量[12]:
预设能量函数阈值,若能量值小于阈值,则对应的点集B满足密度函数标准;若能量值大于或等于阈值,则点集B不能满足密度函数标准,需要再次操作步骤(1)到(3),直到符合条件时为止。
1.3.2 基于三角形美化度函数的曲面网格质量约束
基于三角形美化度函数约束三角网生成质量,将元素的大小与美化程度作为评估三角面网优劣的指标,手工艺品表面模型的分辨率和表面形态通过面网优化技术来调节[13]。定义一个三角形T,基于三角形基本特性(面积与外接圆半径决定了三角形的大小、内切圆半径与外接圆半径比值决定了三角形的质量)构建三角形美化度函数:
公式(10)中,三角形内切圆和外接圆半径分别采用h(T)、U(T)描述;l(T)取值区间为0~0.5,若要获取最佳的三角形形状质量,需令T为等边三角形,l取值为0.5;若l(T)趋近于0,获取的三角形质量较差,形状趋近于扁长。定义手工艺品整体面网美化水平,以三角面网中三角形数量|T(S)|为对象构建全局美化度函数:
将获得的二维自适应采样点集映射到三维空间,以重构手工艺品的三维模型,完成三维网格自适应重采样。然后在美化度函数约束下提高三维网格质量,基于平面参数化一一映射特性,将高质量平面网格覆盖在参数化平面网格上;基于重心插值法,结合原三角形三维坐标,计算新采样点三维坐标,实现手工艺品三维模型的重构。
2 测试与分析
我们开展一次手工艺品设计测试以评估计算机技术辅助下的手工艺品设计的实际应用性能,以手工艺品为测量对象进行三维数据采集并实施逆向设计,三维数据采集工具为激光扫描仪,具体参数见表1。

表1 激光扫描仪参数
测试搭建的计算机硬件环境为:Intel(R)Core(TM) i5-2410M CPU,2.3 GHz,内存(RAM)为4 GB,操作系统属于64 位。测试中以3Dmax 软件、CAD 软件作为辅助工具。为突出基于计算机辅助的技术在手工艺品设计与研发中的高性能,采用同类型的基于Delaunay 三角网格手工艺品建模方法(方法1)、基于Canny 边缘检测的手工艺品设计方法(方法2)进行对比测试。
测试中以 cow、sheep、monkey、giraffe、elephant手工艺品造型为对象进行再设计,各手工艺品原型基本数据信息如表2 所示。
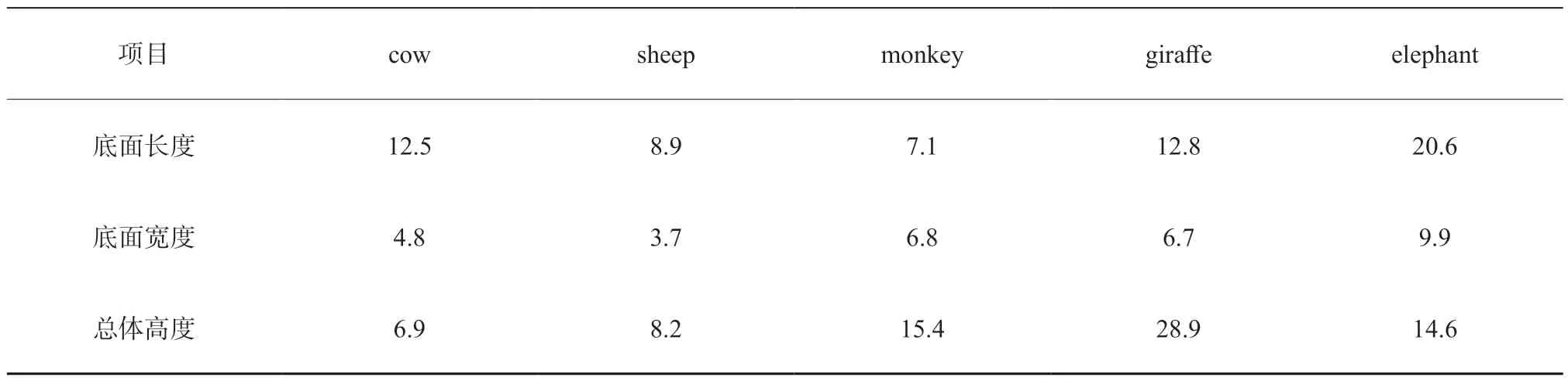
表2 手工艺品原型基本数据信息单位:cm
2.1 三维轮廓信息提取效果分析
我们统计了3 种方法检测各个对象轮廓边缘的误差情况,以明晰各方法的性能优劣。使用MAE(平均绝对误差)和RMSE(均方根误差)描述三维轮廓信息提取的偏差,计算方法如下:
其中,x表示手工艺品轮廓的真值,m(x)表示轮廓提取均值,测量总量用n表示。三维轮廓信息真值通过人工测量与手工艺品自身配备参数进行综合确定,以商讨的最佳值作为真值。
基于上述公式获得各方法三维轮廓边缘提取的MAE和RMSE均值,如表3 和表4 所示。

表3 三维轮廓边缘提取MAE 统计

表4 三维轮廓边缘提取RMSE 统计
结合表3 和表4 数据可知,基于计算机辅助技术的方法提取三维轮廓边缘的平均绝对误差保持在0.100 左右,数值浮动较小,均方根误差在0.100 ~0.250 之间,数值较低;方法1 的三维轮廓边缘提取的MAE和RMSE值较高,RMSE值最大可达0.684;方法2 的MAE和RMSE水平虽然略低于方法1,但是误差水平极其不稳定,提取三维轮廓边缘的可靠性差。综合对比可知,基于计算机辅助技术的方法展现了良好的三维轮廓边缘提取精度与稳定性。
基于计算机辅助技术的方法在三维轮廓的提取上误差小,是因为在边缘提取阶段应用了改进的Canny 边缘检测算法,引入45°、135°方向梯度运算模板,考虑了梯度幅值与梯度角度计算的多个方向,对边缘提取进行有效约束,所以提取手工艺品三维轮廓的精度更优。不仅如此,我们进一步使用边缘连接算法筛选边缘点,对环境干扰下形成的手工艺品轮廓不清晰部分、变化不显著的边缘灰度部分也具有较高的提取能力,为边缘提取精度提供双重保障。
2.2 模型曲面重构效果分析
孔洞数量严重影响三角网格生成的速率与质量,为此我们统计了不同点集规模下各方法的曲面网格孔洞数量,其结果如图3 所示。

图3 曲面网格孔洞检测数量
分析图3 可知,在不同点集规模下基于计算机辅助技术的方法重建的网格曲面中孔洞分布最少,方法1 与方法2 的孔洞分布数量折线明显比其高,展现较差的网格重采样质量。基于计算机辅助技术的方法点集规模为2 341 时,孔洞数量最少为1 个,其余情况下网格的孔洞数量均低于5 个,说明其重建三维手工艺品模型的曲面效果良好,可以重建出完整的模型曲面。这是因为其在构建三角网格过程中应用了加权CVT 曲面网格采样策略,此前构造密度函数修正采样点的疏密程度,使被测量的微小特征得以保留,能够在表达原手工艺品模型曲面特征的基础上构建美观的三角网格,一定程度上减少了孔洞的存在;不仅如此,我们引入三角形美化度函数把控曲面网格质量,剔除了狭长、扁平的不美观三角形,以函数形式约束三角形的形状,进一步减少了曲面中孔洞区域的存在,因此其重建的曲面网格孔洞数量较少。
3 结论
我们基于多种计算机辅助技术设计了一套手工艺品研发方法,以三维激光扫描数据作为样本在计算机端进行了三维轮廓边缘提取、三维曲面网格重建处理,高精度重建手工艺品的三维模型,方便设计师进行手工艺品的再创造。该方法在物体三维轮廓边缘提取方面展现了优势,在Canny 边缘检测算法中引入45°、135°方向梯度运算模板,考虑了梯度幅值与梯度角度计算的多个方向,利用边缘连接算法筛选三维轮廓的边缘点,获得了精准的三维模型轮廓信息,为构建精准的模型轮廓架创造良好条件。另外,基于自适应重采样的手工艺品曲面建模获得了低孔洞的网格构建效果,较好地还原了三维模型曲面的细节特征与真实性。
猜你喜欢
电子技术与软件工程(2021年7期)2021-06-16
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
收藏界(2019年3期)2019-10-10
中国商界(2017年4期)2017-05-17
光学精密工程(2016年4期)2016-11-07
工业设计(2016年10期)2016-04-16
工业设计(2016年10期)2016-04-16
计算机工程(2015年4期)2015-07-05
时代英语·高三(2014年5期)2014-08-26
