基于人工智能算法的太阳能水面垃圾回收装置研究*
2023-06-01 08:07李福冬孟德明陈尉棋曹新玉杨弦璀廖梦杰
科技与创新 2023年10期
李福冬,唐 甜,2,孟德明,2,陈尉棋,曹新玉,杨弦璀,廖梦杰
(1.桂林电子科技大学信息与通信学院,广西 桂林 541004;2.桂林电子科技大学电子电路国家级实验教学示范中心,广西 桂林 541004)
截至2022 年,全球水面垃圾数量将达6 亿t,不仅污染环境,还造成资源浪费。对垃圾的回收是绿色家园建设的保证,引起了全民的关注,目前市面上出现了一些垃圾回收的装置[1-2]。本文基于人工智能算法的太阳能水面垃圾回收装置,可全天候24 h 工作,拥有GNSS 全球卫星导航系统和自主导航系统,可实现无人自主工作,携带九轴传感器,可以克服极端天气,实现了安装平衡及正常工作。此外还配置了太阳能电池板,提高装置的续航能力。
1 水面垃圾回收装置的研发现状分析
“厦门湾海漂垃圾漂移轨迹预测系统”是在西北太平洋、台湾海峡及中国沿海港湾的水动力模型的基础上,结合厦门海洋垃圾监测与防治的管理需要进行的精准研发[1]。该系统基于天气预报模型、海洋数值预报模型,融合了海漂垃圾实时监控信息,模拟并预测厦门湾海漂垃圾漂移轨迹,然后通过厦门大学海洋监测与信息服务中心进行发布和推送。
欧洲SeaClear 科研团队开发了一种可在水下收集垃圾的机器人系统——“净海”,该系统通过深度学习算法和声学传感器将垃圾与动植物区分开来,使用定制设计的抓取器和抽吸设备收集检测到的垃圾,并将垃圾放到位于水面的收集箱中。通过多主体控制技术,将所有机器人都相互连接,除了设置一个机器人的初始命令外,整个系统无需人工干预。
海上垃圾回收装置正在向小中型机器人研究进发,采用MSP430 单片机下C 语言编程设计,能大大提高处理问题的能力[3];使用超声波避障寻找垃圾,对垃圾位置进行精确定位;采用太阳能源与电池结合的电能供给方案,提高工作效率。
2 水面垃圾回收装置的工作机理分析
2.1 人工智能算法
通过采用计算机技术,在多个函数的控制下构建复杂而完整的系统,通过高质量拟合效果的神经网络算法,提高对识别对象具体的信息处理的能力。本装置利用计算机技术的云计算,采用神经网络算法,相对于传统的回收装置,拥有更高的数据信息检索能力和更快的信息匹配能力,在高效回收垃圾的同时,不影响水中生物的正常栖息。
2.2 太阳能动力源
太阳能动力源的核心为太阳能发电装置,实现能量的转化,为水面垃圾回收装置提供源源不断的电能。用数字信号处理作为系统控制核心,以Boost 升压电路作为主回路,同时还有逆变电路、并网跟踪零电路等其他外围电路组成太阳能发电系统。本文设计的太阳能发电系统应用到的是单片机STM32 系列[4],可通过主板设计来改善系统抗干扰能力及扩展能力,拥有超低的研发成本,实时性能好,更适合于太阳能发电系统的设计。
2.3 水面垃圾回收装置
将水面垃圾回收装置放置于水流湍急的漩涡处,利用水流的流动性,将水面垃圾汇集到垃圾回收装置附近,不仅可以节省能量,还可以提高垃圾回收效率。只需要消耗较小的能量作为动能,实现能量的最大利用。据相关数据统计,可以将装置的能耗降低3%,再加上太阳能装置不断发电,实现装置更高的续航。对于水面垃圾的识别,采用CCD(Charge Coupled Device)传感器,将电荷转换成为电压,然后进行AD(模数)转换得到图像,用时钟脉冲驱动,将生成的视频信号进行二值化处理,分辨是否为水面垃圾。
3 水面垃圾回收装置的设计
3.1 总体设计
水面垃圾回收装置设计过程中,外形设计为圆滑桶形,减少装置在水面移动所产生的阻力。在上表面安装一块太阳能板,当太阳光照射时,将它产生的能量不断地转换成电能储存到圆桶形底部的电池中。在圆形桶上部安装浮力仓装置,以便水面垃圾回收装置能够悬浮在水面上。推进器安装在圆桶两侧的中上部,让水面垃圾回收装置能够在水面上移动。在圆桶中部安装感应器和GPS(Global Positioning System)定位装置,通过红外感应器感应,侦测前方是否存在障碍物,通过CDD 传感器识别垃圾,将信息反馈到终端。装置内部设置成一个内胆,内部套上一个可重复利用的碳纤维袋子。底部设计成圆形的发动机装置,可将周围垃圾在吸力作用下吸进内胆袋子,从而完成垃圾的收集。装置剖面图如图1 所示。
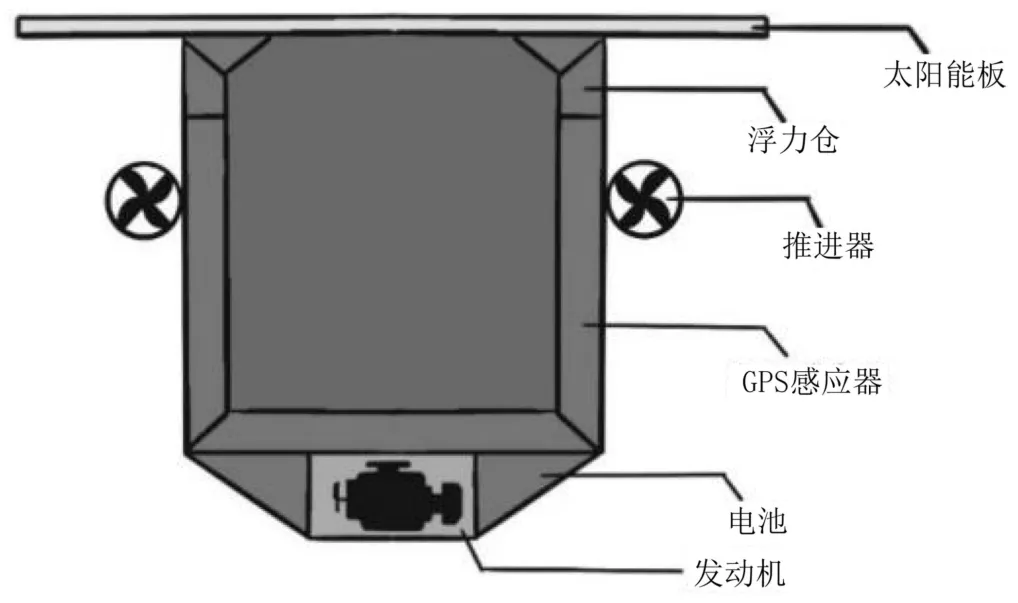
图1 人工智能算法的太阳能水面垃圾回收装置剖面图
为方便用户使用设备,在设备中加入Wi-Fi 模块,将工作状态信息传至用户手机APP 或PC 端,实时了解工作情况,并能够及时调整设备工作状态,保证设备正常工作。
3.2 水面垃圾回收装置的功能性设计
3.2.1 太阳能板稳压输出电路
为使太阳能板充电电路能够在恒电流、恒电压模式下对锂电池进行充电,采用充电芯片TP4056。该芯片集成功率MOSFET 电路的降压开转换器,有过热关断保护功能。锂电池也可以给充电模块进行反向供电,实现无充电情况下维持低功耗的工作模式,同时监测设备的单片机不断检测锂电池的电压。当电压低于4.2 Ⅴ时,开启充电模式;当锂电池的电压达到浮充电压后,芯片将充电的电流降到初始设定电流值的10%,芯片TP4056 将停止对锂电池的充电,同时将锂电池的充电电流模式调整成低电流充电模式,起到保护电池的作用,提高电池寿命。TP4056 芯片控制流程如图2 所示。
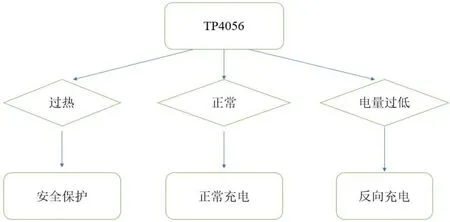
图2 TP4056 芯片控制流程图
3.2.2 平衡和驱动系统
为使装置更好地平衡悬浮在水面上工作,采用九轴传感器模块MPU9250,对装置姿态数据进行采集;采用超声波测距模块HY-SRF05,测与前方障碍物之间的距离;采用蓝牙模块ZS-040,与上位机建立连接并发送指令。
采用九轴传感器模块MPU9250 首先检测装置的倾斜角度和加速度,并将数据传送至STM32F103 单片机,单片机调用片内烧录的角度控制函数,使用PD(Priority-driven scheduling)算法计算出相应的PWM(Pulse Width Modulation)波并输出至电机驱动模块L,控制电机转动,抵消装置的倾斜,达到直立平衡。
超声波测距模块HY-SRF05 通过超声波发射器自动发出方波,并且检测有无信号返回,当超声波接收器接收到返回信号时,通过I/O 口输出高电平,由高电平持续的时间计算得到测试距离。
蓝牙模块ZS-040在空旷环境下的有效传输距离达10 m,与上位机建立连接,发送前进、后退、左转、右转指令控制装置运动。平衡和驱动系统如图3 所示。
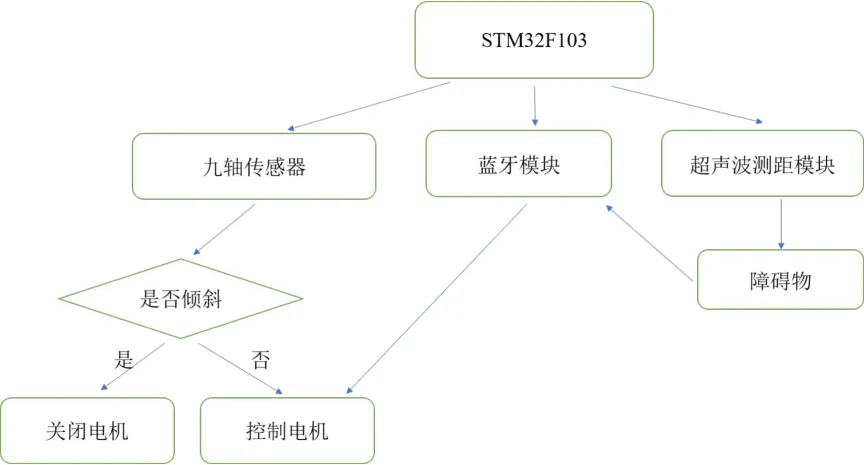
图3 平衡和驱动流程图
3.2.3 传感器感应系统
对障碍物的识别处理,采用红外感应技术。红外发射二极管采用直向发射,有垃圾在附近时,阻碍红外线的发射,一部分红外线反射回来。通过模块电路的处理,输出电平信号,从而实现单片机对障碍物的感应。
3.2.4 实时动态-全球卫星导航系统(RTK-GNSS)
在水面区域,由于水流等因素导致装置视角范围限制及计算延迟,不能准确预判装置行驶路线,采用实时动态-全球卫星导航系统(RTK-GNSS)能够更好地进行工作[5]。
RTK-GNSS 可对储存路径信息及实时定位进行导航。且GNSS 导航系统采用RTK(Real-Time Kinematic)载波相位差分定位技术,定位信号更新频率最高为10 Hz,动态水平定位精度为±1 cm,动态垂直定位精度为±2 cm。RTK-GNSS 为装置提供高精度定位信息。惯性传感器可以自主感应水面机器的3D运动角速度和线加速度,基于航位推算原理进行导航定位,以GNSS定位为主,融合MEMS(Micro-Electro-Mechanical System)惯性传感器,实现导航定位。实时动态-全球卫星导航系统流程图如图4 所示。

图4 实时动态-全球卫星导航系统流程图
3.3 技术优势
装置采用基于人工智能的神经网络算法,可以快速获取图像,确定识别的物体。平衡感应装置在感应到水面浮动后调节装置的平衡,使装置正常运行。该装置安装了GNSS 全球卫星导航系统和自主导航系统,可精确定位装置所在位置,以便于管理员实时监控。在未来的市场中,可以将该装置投放于更多的江河流域,实现全自动化清理垃圾。在技术成熟时,可以对其部分技术进行升级和扩展。
4 结论
本文提出了一种基于人工智能算法的太阳能水面垃圾回收系统,并给出了该水面垃圾回收装置的结构设计及控制系统设计流程。该装置以GNSS 定位为主,融合了MEMS 惯性传感器,携带九轴传感器联合电机驱动实现装置可控,针对水上漂浮式垃圾尤其是水漂垃圾的分散性等特点,可主动对水上漂浮物进行生态打捞,提高中国对水上漂浮物垃圾的处理效率和质量。
猜你喜欢
卫星应用(2022年1期)2022-03-09
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
科学大观园(2020年14期)2020-07-17
环球时报(2020-06-24)2020-06-24
课外生活(小学1-3年级)(2020年2期)2020-03-09
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
摄影之友(影像视觉)(2017年8期)2017-11-27
中国惯性技术学报(2017年1期)2017-06-09
能源(2016年3期)2016-12-01
百科探秘·航空航天(2016年9期)2016-12-01