
MIMO 中无人机基站的最优定位策略
2023-05-30 09:32高彦杰
现代电子技术 2023年11期
李 昀,高彦杰
(上海电力大学 电子与信息工程学院,上海 200000)
0 引 言
无人驾驶飞行器(无人机)具有快速部署和机动性强等独特的优势。因此,在农业、工业、通信、军事和人工智能等多个领域中,在提高服务质量方面具有巨大潜力[1]。5G+或6G 无人机的新兴用途之一是作为电信行业中的基站,适用于服务具有极高用户设备密度的场景,用来扩展无线通信覆盖范围,通过减少连接距离来提高频谱效率,提高多样化服务的质量[2-4]。随着终端数量的增加,结合高机动性场景和多输入多输出等新型技术,无人机基站的位置和轨迹跟踪已成为一个新的研究领域,无人机基站的路径规划已成为关键任务操作中需要解决的问题之一。
1 研究现状与优化
1.1 现有的研究成果与不足
在固定基站的场景中,传统的小区选择是根据最强的接收功率来选择基站执行的。固定基站拓扑已被文献[5-6]证明在频谱利用率方面不是最优的。在文献[7]中,异构网络通过缩短宏小区基站(MBS)到其用户设备的距离,帮助优化了频谱。然而,在文献[8]中可知,使用无人机基站进一步优化频谱需要缩短无人机作为基站和其用户设备之间的集体距离。采用混合整数非线性规划(MINLP)技术解决单天线无人机基站的定位问题已被文献[9]证明是非常复杂的。
以往的研究都是在考虑度量空间最小化的情况下进行的,函数在多维欧几里德度量空间中求解无人机基站的定位问题[10]。文献[11-12]表示,在MIMO 环境中,无人机基站将配备相当数量的天线,信道的研究、无人机基站的定位和小区选择问题甚至更加复杂,因此MINLP 求解器的实现对网络性能有相当大的影响。虽然在某些应用中可以考虑度量空间,但文献[13]已经证明,由于无线电传播的特性以及发射器和接收器天线之间的障碍物,收发器之间的最短距离并不总是最优的。
1.2 本文的研究方向与优势
针对上述问题,本文讨论了在MIMO 无线网络设置中多个无人机基站的最优定位问题。首先,介绍了无人机基站MIMO 无线通信模型,然后提出了一种基于无监督机器学习的低复杂度算法,该算法根据用户设备所经历的共有信道无线传播来迭代选择无人机基站的位置,而不是传统的度量空间成本函数。该算法在更新无人机基站位置的同时,减少了系统中的传播损耗。
2 系统模型
2.1 无人机基站MIMO 系统模型
考虑一种蜂窝型MIMO 系统,该系统共有L个无人机,每个无人机配备M个天线阵列,通过空间复用同时服务K个终端。设单个无人机第k个终端到第m个无人机基站天线之间的增益表示为,假设无人机基站天线配置在一个紧凑的阵列中,一个给定的用户设备和单个无人机基站天线之间的无线链路受一个相等的大尺度衰落系数βk的影响,该系数与K、空中距离和不同的小尺度衰落有关。因此,单个无人机的可以表示为:
假设小尺度衰落在用户设备和无人机基站之间遵循独立的瑞利分布,即为独立同分布圆对称高斯随机变量,平均μ值为0,方差σ2=1(即CN(0,1))。所有用户设备和所有无人机基站之间的信道增益用矩阵表示为:
上行链路中,各终端同时传输k个信号x1,x2,…,xk,第m个无人机基站天线接收信号为:
式中:ρul是上行链路信噪比(SNR);ωm~CN(0,1)是接收器噪声。假设{ωm}在天线之间不相关。将各终端的发射功率分别约束为E{ |xk|}≤1,其中E{·}为平均算子,认为发射信号的均值E{xk}=0。因此,根据式(3),无人机基站中的M天线接收到矢量y=[y1,y2,…,yM]Τ,用(·)Τ作为转置算子,则有:
当x= [x1,x2,…,xk]Τ,ω= [ω1,ω2,…,ωM]Τ,gk为矩阵g的第k列。在下行链路中,M个无人机基站天线发送M个矢量x,通过互易,第k个用户设备接收为:
式中:ρdl为下行链路信噪比;ωk为噪声。如果用向量的形式表示式(5),向量y可以表示为:
式中:y=[y1,y2,…,yk]Τ;ω=[ω1,ω2,…,ωM]Τ。假设CN(0,1)噪声样本{ωk}和一个归一化的x使E{ ‖xk‖2}≤1,对应天线辐射功率之和的长期约束,无人机基站和现有的固定基站之间有可用的容量和可靠的回程链路。
2.2 无监督无人机基站轨迹选择
在实际无人机基站系统中,拟部署的无人机数量L及其初始三维位置矩阵T= {z1,z2,…,zL}∈R(L×3)已知,其中zl表示第l个无人机基站的位置。如果假设l=3为最小值,则无人机基站可以根据信号强度三角定位用户设备的位置。通过定位无人机基站得到终端定位矩阵,表示为有限的三维矩阵S={r1,r2,…,rk}∈R(K×3),其中rk表示第k个用户设备的位置。目标是迭代找到无人机基站位置T的最佳矩阵,即成本最低。其中 |T|=L,T的递归模块将追踪到无人机基站的实时轨迹,使成本τ达到最小。
算法的第一步将第k个用户设备分配给MIMO 无线网络中接收信号强度最低的第l个无人机基站。从无人机基站的位置诱导了一个三维的泰森多边形分解到L的小区C1,C2,…,CL,使CL= {x∈S:xk的最低成本τ为zL}。与传统的欧几里德度量成本函数不同,cost(τ) =,其中z隐含在大规模衰落估计信道增益矩阵gk中。将式(5)中接收到的信号最小化:
因此,第k个终端根据式(7)选择第l个无人机基站表示成本τ最低的小区Cl。
算法的第二步,根据分配给每个无人机基站的用户设备位置的第一时间更新无人机基站位置矩阵T,即zl←E[Cl]。算法一直运行到无人机基站的位置稳定(即直到式(7)中的成本函数τ收敛)。算法可以视作一个简化的流程图,如图1 所示。

图1 算法流程图
在算法的运行过程中,成本单调减小,算法将收敛到最终的无人机基站位置T的最终集合。为了证明收敛性,假设和分别表示第t次迭代开始时的中心和簇。
迭代的第一步将每个用户设备分配到与其最近的无人机基站,即:
第二步,对随机向量进行一般的偏方差分解:
对于任意集合C∈Rd和任意z∈Rd,每个无人机基站都以其均值为中心。
3 仿真结果与分析
经过1、4、7、10 次迭代后,以欧氏距离为成本τ的无人机轨迹如图2 所示,水平轴和垂直轴以m 为单位。
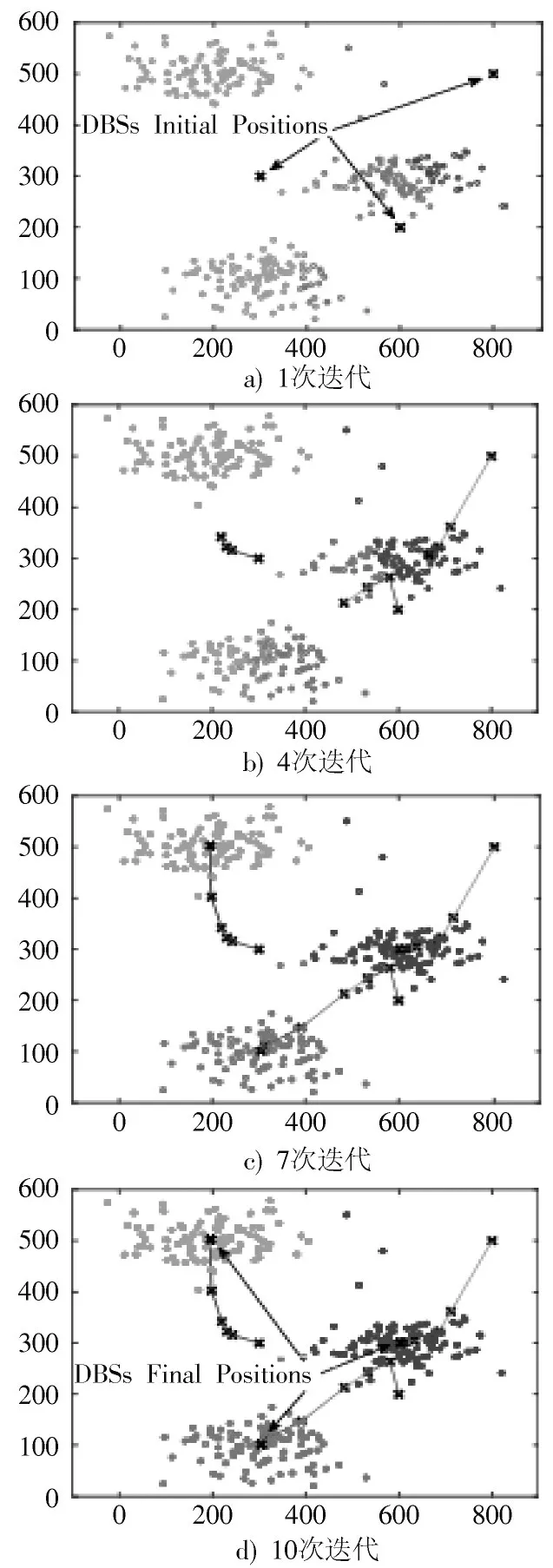
图2 欧几里德函数迭代1、4、7、10 次后无人机基站的位置
经过1、4、7、10 次迭代后,使用MIMO 信道的无人机轨迹如图3 所示,接收信号强度作为成本τ,水平轴和垂直轴以m 为单位。

图3 信道相关成本函数迭代1、4、7、10 次后无人机基站的位置
本文提出的成本函数相对于文献[3]中使用的欧几里德度量成本函数,在40 次迭代后的平均传播损耗与迭代次数如图4 所示。
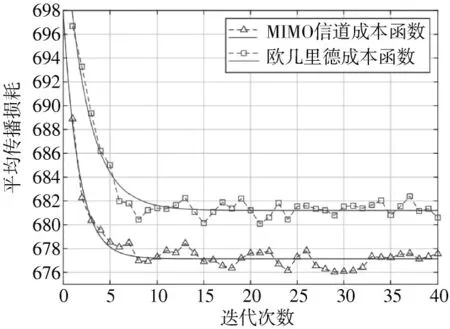
图4 平均传播损耗与迭代次数的关系
为了模拟无人机基站与用户设备之间的传输信号,使用Matlab 设计了一个带有随机散射体的6 GHz MIMO信道。每个无人机基站包含一个64 元发射均匀的线性阵列(ULA),发射天线有余弦响应,接收天线相同,两个阵列的元素间距小于半个波长,该信道有200 个随机产生的静态散射体,信号的采样速率设置为10 MHz。
第一个无人机基站的高度限制在距离地面50 m,后续每个高度上升1 m,以避免碰撞。为了说明仿真场景,在3 个高度密集的集群中部署了300 个用户设备,3 个无人机基站分别运行传统的欧几里德度量成本函数和本文提出的信道相关成本函数。
图2 显示了以欧几里德成本度量函数经过1、4、7 和10 次迭代后得到的无人机基站的二维轨迹。用户设备按照最短的距离聚集到相应的无人机基站上,形成了完全分离的泰森多边形区域。这些分布没有考虑到MIMO 信道的真实特性;因此,无人机基站只能找到一条到用户设备分布中心的快速路径。
图3 展示了无人机基站在第1、4、7 和10 次迭代后遵循基于信道的矢量量化最小值的轨迹。从第一次迭代开始,模拟的散射体结合MIMO 信道中经历的大规模衰落效应,影响用户设备分配给无人机基站。在图3b)中,两个无人机基站趋于收敛,在最下方的终端集群和最右侧的终端集群之间分担业务负载。如图3c)所示,由于MIMO 无线网络中信号强度的最小化,服务于顶部集群的无人机基站仍然在底部分配终端。在图3d)中,3 个无人机基站收敛于3 个综合生成的用户分布。
图4 评估了生成无人机基站轨迹对所有子系统在40 次迭代中经历的平均传播损耗。
将本文算法得到的数据与欧几里德度量得到的数据进行了比较,在仿真过程中,本文提出的算法在每个子系统中产生了较低的平均传播损耗。
4 结 语
本文解决了MIMO 环境下多个无人机基站的轨迹选择问题,证明文献中常用的欧几里德成本函数可能不适合高动态无线场景。本文提出了一个替代的成本函数,以最小化接收信号的强度,而不是传统的度量距离。无人机基站位置的初始化、信号三角测量机制的影响、小区间干扰场景等都可以进行进一步的研究,以达到最大的系统性能。
注:本文通讯作者为李昀。
猜你喜欢
上海文化(文化研究)(2022年3期)2022-06-28
数学年刊A辑(中文版)(2022年4期)2022-02-16
数学年刊A辑(中文版)(2019年3期)2019-10-08
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
中国学术期刊文摘(2016年1期)2016-02-13
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
移动通信(2015年17期)2015-08-24
电子设计工程(2015年8期)2015-02-27
