空间电压矢量PWM 控制的磁轴承开关功放设计
2023-05-29 05:50:58孙建东陈雨琴于大永王兆杰
电子制作 2023年7期
孙建东,陈雨琴,于大永,王兆杰
(瑞纳智能设备股份有限公司,安徽合肥,230000)
0 引言
磁悬浮轴承是一种通过电磁力使定转子之间无机械接触的新型轴承,与普通机械轴承相比,磁悬浮轴承具有无摩擦、无油污、噪音小和使用寿命长等优点,因此广泛应用于航空航天、真空超净、高速机床、储能飞轮等领域[1~2]。
在磁悬浮轴承控制系统中,功率放大器作为磁力轴承的执行元件,其作用是根据控制器的电流指令使流过电磁轴承线圈的电流随电流指令变化,从而使转子恢复到平衡位置[3],决定了磁悬浮轴承性能的好坏。在永磁偏置混合磁悬浮轴承中[4],考虑磁轴承线圈电流可以双向流通,主功率电流拓扑多采用全桥型开关功放结构,相比于其他半桥式拓扑结构,该拓扑可提供双向电流,具有电流纹波小、电流响应速度快等优势[5],采用传统全桥拓扑结构的磁轴承开关功率放大器每个H 桥只能驱动一个自由度的轴承线圈,五自由度磁轴承开关功放需要的开关管数目多,造成功率放大硬件部分体积大、功耗高,可靠性降低[6]。
H 桥功率放大器的实现形式主要有两电平和三电平控制方式[7],相对于两电平控制方式,采用三电平调制技术的开关功放电流纹波与电源电压无关,可以通过提高输入电压进一步提高开关功放的电流响应速度,减小开关损耗,从而有效降低磁轴承涡流损耗,提高磁悬浮系统的效率[8],因此三电平调制技术在磁轴承开关功放中得到了广泛的应用。因此本文基于三电平三桥臂主电路拓扑结构,结合空间电压矢量(SVPWM)控制理论,给出了一种三电平三桥臂主电路拓扑功率放大器的实现方法,并通过MATLAB/Simulink 搭建仿真模型验证算法的可行性。
1 SVPWM 磁轴承功率放大器主电路拓扑
20 世纪70 年代初,德国学者F.Blaschke针对交流电动机提出了磁场定向控制(矢量控制)原理,它是根据变流器空间电压(电流)矢量切换来控制变流器的一种控制策略[9]。磁轴承功率放大器其本质也是一种PWM 变流器,在永磁偏置磁轴承系统中,考虑磁轴承线圈电流需要双向流通,主功率拓扑多采用全桥型开关功放结构。综合上述原因,本文主电路采用三桥臂功率转换电路[10]。
三桥臂全桥功率放大器主电路拓扑结构如图1 所示,其中VT1~VT6为开关管,D1~D6为续流二极管,1L和 2L为两个自由度永磁偏置磁轴承线圈绕组,Udc为母线电压。三桥臂开关功放驱动 1L和 2L两个磁轴承线圈绕组,两路磁轴承线圈共用功率开关管VT3和VT4,相比于传统H 桥结构,开关管数量减少,开关损耗也会相应的降低,在硬件结构上复杂度降低,体积减小,可靠性提高。

图1 SVPWM 磁轴承开关功放主电路结构
在三电平PWM 调制下,同一桥臂的上下两个开关器件的门极驱动信号为互补的控制信号,上下两个桥臂一个处于导通状态,另一个处于关断状态。定义上桥臂导通、下桥臂关断状态为“1”,上桥臂关断、下桥臂导通状态为“0”,定义三个独立变量定义开关函数 1S、S2、S3,有:
根据 1S、S2和S3的值可以组合出八种开关组合状态(1SS2S3)。八个开关状态(000)、(001)、(010)、(011)、(100)、(101)、(110)、(111)对应八个基本电压矢量 0V~7V,各个基本电压矢量分布如图2 所示,两个磁轴承下线圈两端分别输出的电压关系见表1 所示。
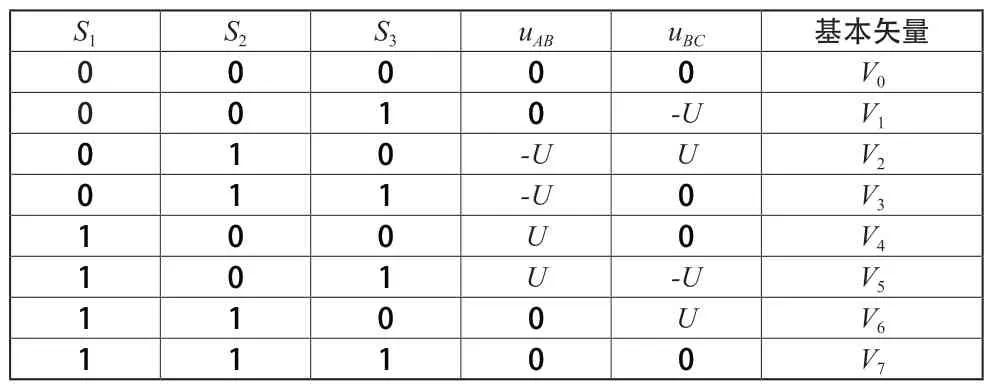
表1 八种开关状态下两个磁轴承线圈两端的输出电压
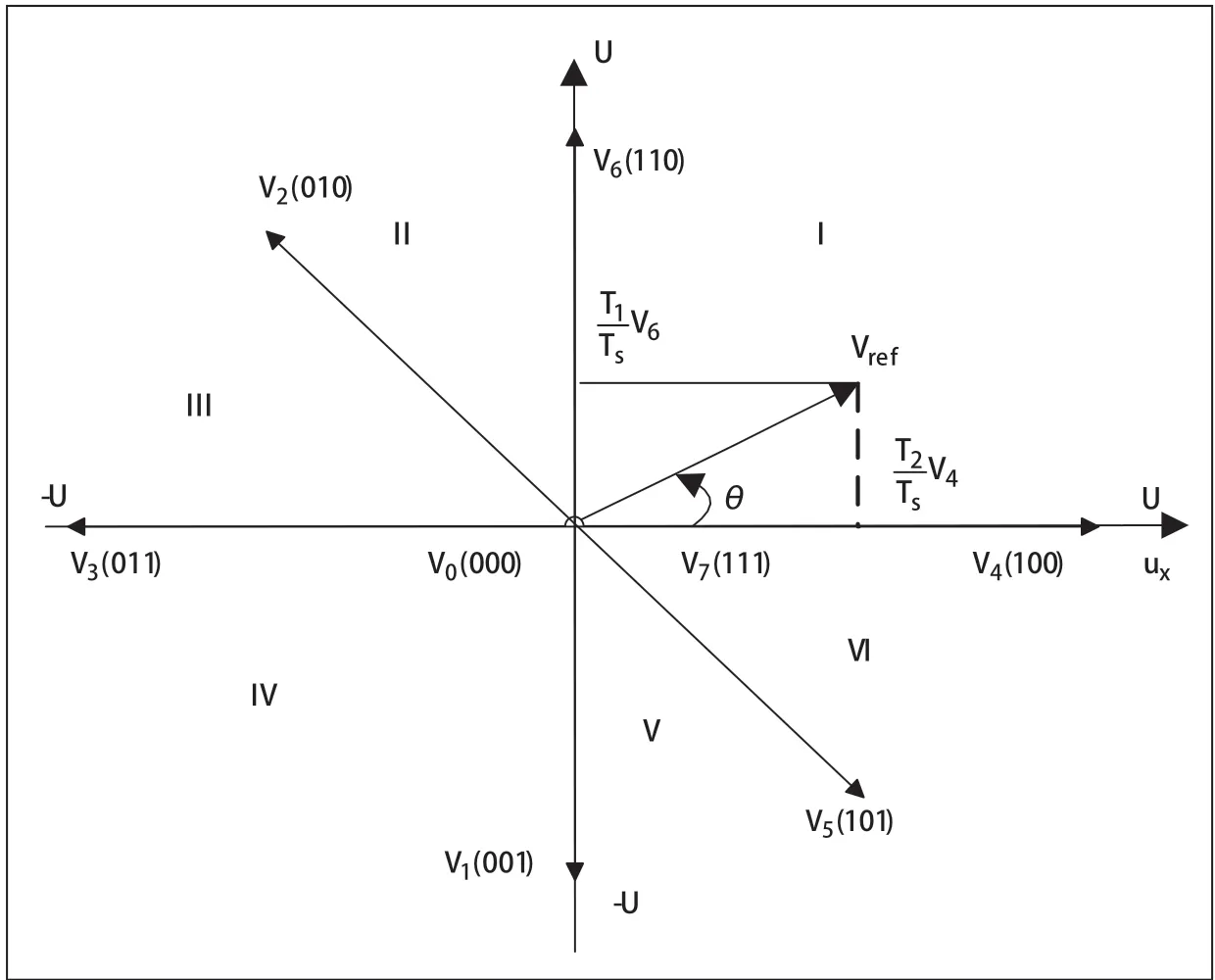
图2 SVPWM 三桥臂开关功放基本电压矢量分布图
通过表1 可知,采用全桥型主电路拓扑的两个磁轴承线圈上会出现U+ 、-U和0 三种电平状态,分别对应电流增长、电流减小及电流续流状态,具有三电平调制技术的优点,与两电平功率放大器相比,三电平功率放大器的功率管增加了续流工作状态,有效的降低了电流纹波[11]。
2 磁轴承开关功放SVPWM 控制策略
SVPWM 控制的基本原理是利用六个功率开关管的八种开关状态对输出电压进行控制,使空间电压矢量逼近磁轴承线圈的电压,本文所述的空间电压矢量为两个单独的磁轴承线圈合成的空间电压矢量。如图2 所示,以ux作为空间角度θ的起始轴,六个电压矢量将xoy平面分为以下六个扇区:扇区I:0≤θ≤π2;扇区II:π2 <θ≤3π4;扇区III:3π4<θ≤π;扇区IV:π<θ≤3π2;扇区V:3π2 <θ≤7π4;扇区VI:7π4 <θ≤2π。六个扇区的相邻两个非零电压矢量可以合成为任一扇区内的电压矢量,当参考电压矢量Vref落在第I 扇区时,根据伏秒积等效原则,Vref的作用效果可以用基本电压矢量 4V作用 4T时间和 6V作用6T时间来代替,即:
式中,4T和 6T分别为基本矢量 4V和 6V在一个周期中的作用时间,0T平均分配给0V矢量和 7V矢量,sT为PWM 开关周期。这样根据输出电压矢量既可以计算所在扇区的两个相邻矢量的有效作用时间,从而确定合成输出电压矢量Vref的两个矢量分量。
2.1 扇区的判断
任意扇区内的参考电压矢量Vref都可以分解成:
因此可以通过Ux、Uy的大小关系,判断出Vref所在的扇区,具体规则见表2。
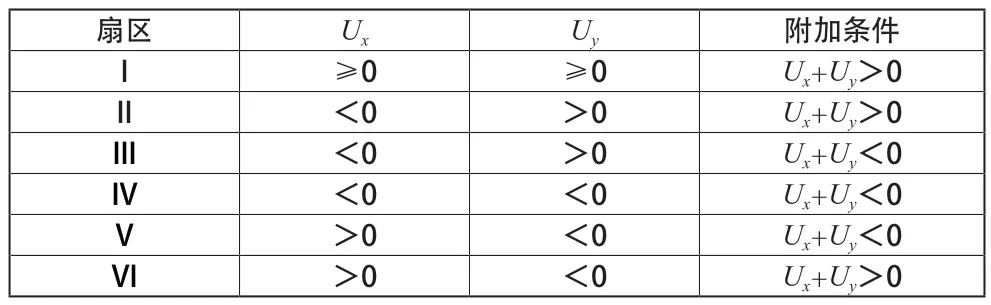
表2 参考电压矢量扇区判断规则
定义三个函数A、B、C 有:
令:
则扇区与N 的对应关系如表3 所示。

表3 扇区与N的对应关系
2.2 各磁轴承线圈工作时间计算
假设磁轴承线圈 1L和 2L经过电流环PI 运算得到的比较值为Cmp1和Cmp2,假设L1的充电时间为t1,假设L2的充电时间为t2,则有:
同理有:
如果为放电,则用式(11)和式(13)计算出来的值为负值,实际使用时应该对该值取反。
2.3 各桥路状态切换时间计算
根据零电压矢量的不同选择,基本电压矢量的作用顺序也不一样。因此就派生出多种组合方式,它们大体上分为7 段式和5 段式两种形式,分别称为对称式SVPWM 和非对称式SVPWM。在一个开关周期内,7 段式对所有的开关管都进行调制;而5段式仅对两路管脚做调制。7 段式SVPWM 各基本电压矢量在每个开关周期内的作用顺序和时间上都是对称分布,所产生的各路PWM 信号也是对称的,可以保证从一个开关状态转到另一个开关状态只有一个桥臂的开关管动作,功率管的开关损耗较5 段式要小,引起的谐波失真较小。下面对几个扇区各桥路状态切换时间的计算进行详细分析。
(1)I 扇区
如图2 所示,I 扇区有基本电压矢量 4V和 6V组成,各基本电压矢量在开关周期内的作用顺序和时间如图3 所示。
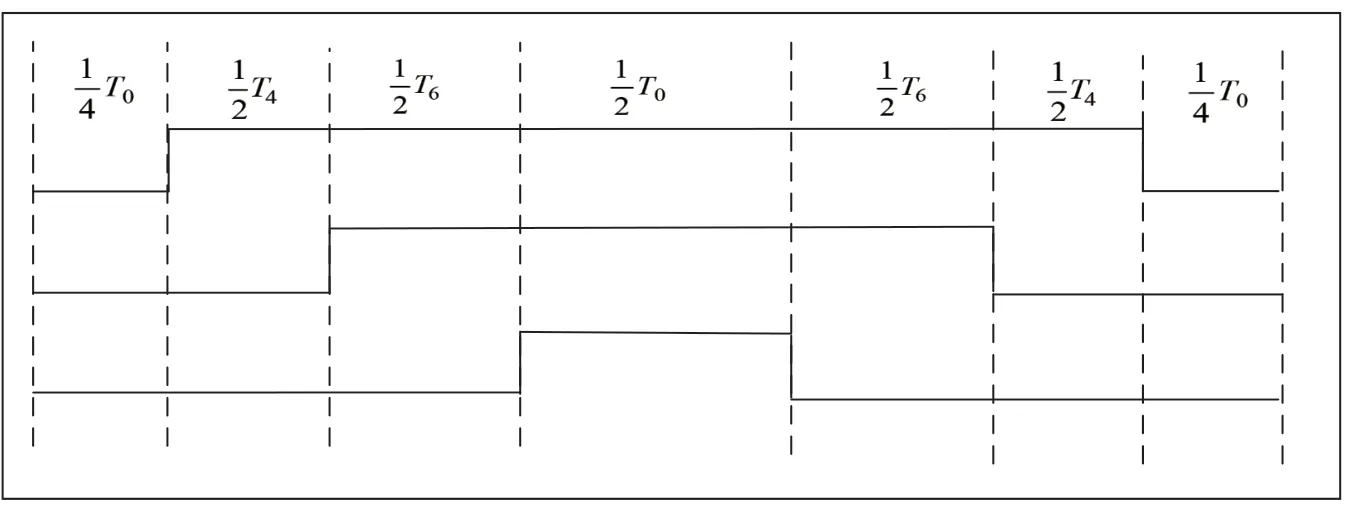
图3 扇区I 开关管导通时间
根据表1 可知,基本电压矢量 4V和 6V两个磁轴承线圈的状态如表4 所示。

表4 扇区I磁轴承线圈状态
根据表4 两个磁轴承线圈状态可知:
将式(14)代入式(15)可得:
(2)II 扇区
II 扇区有基本电压矢量 2V和 6V组成,各基本电压矢量在开关周期内的作用顺序和时间如图4 所示。

图4 扇区II 开关管导通时间
根据表1 可知,基本电压矢量 2V和 6V两个磁轴承线圈的状态如表5 所示。

表5 扇区II磁轴承线圈状态
根据表5 两个磁轴承线圈状态可知:
由于磁轴承线圈 1L在基本电压矢量 2V作用下为放电,则有:
将式(18)代入式(19)可得:
(3)III 扇区
III 扇区有基本电压矢量 2V和 3V组成,各基本电压矢量在开关周期内的作用顺序和时间如图5 所示。

图5 扇区III 开关管导通时间
?
根据表1 可知,基本电压矢量 2V和 3V两个磁轴承线圈的状态如表6 所示。

表6 扇区III磁轴承线圈状态
根据表6 两个磁轴承线圈状态可知:
由于磁轴承线圈 1L在基本电压矢量 2V和 3V的作用下为放电,则有:
将式(22)代入式(23)可得:
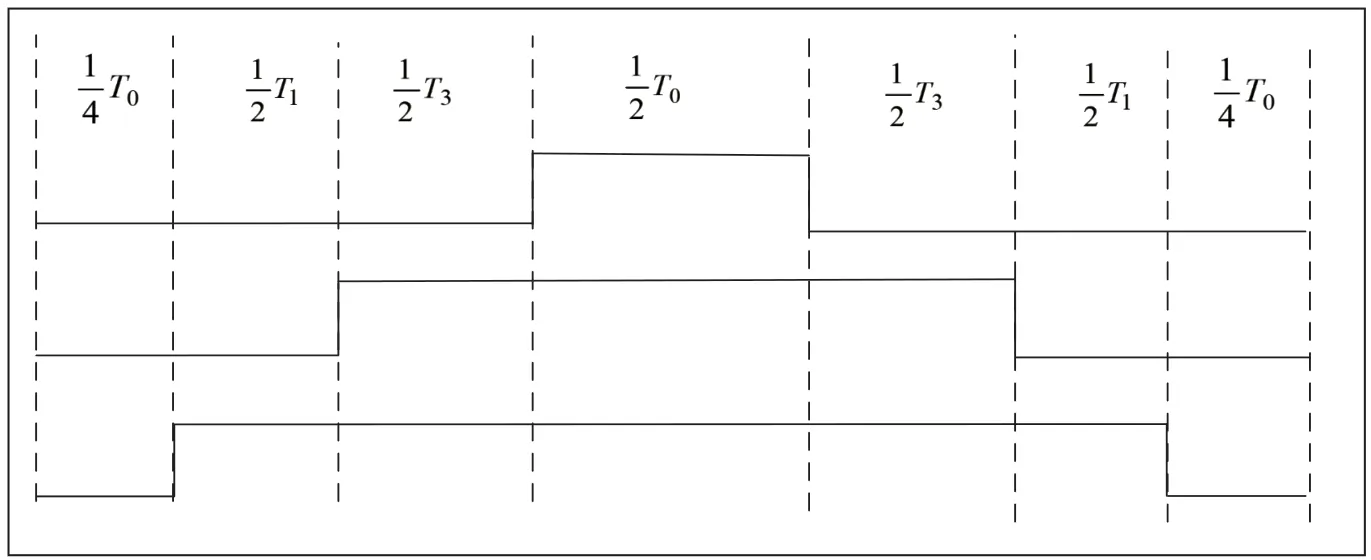
(4)IV 扇区
IV 扇区有基本电压矢量 1V和 3V组成,各基本电压矢量在开关周期内的作用顺序和时间如图6 所示:
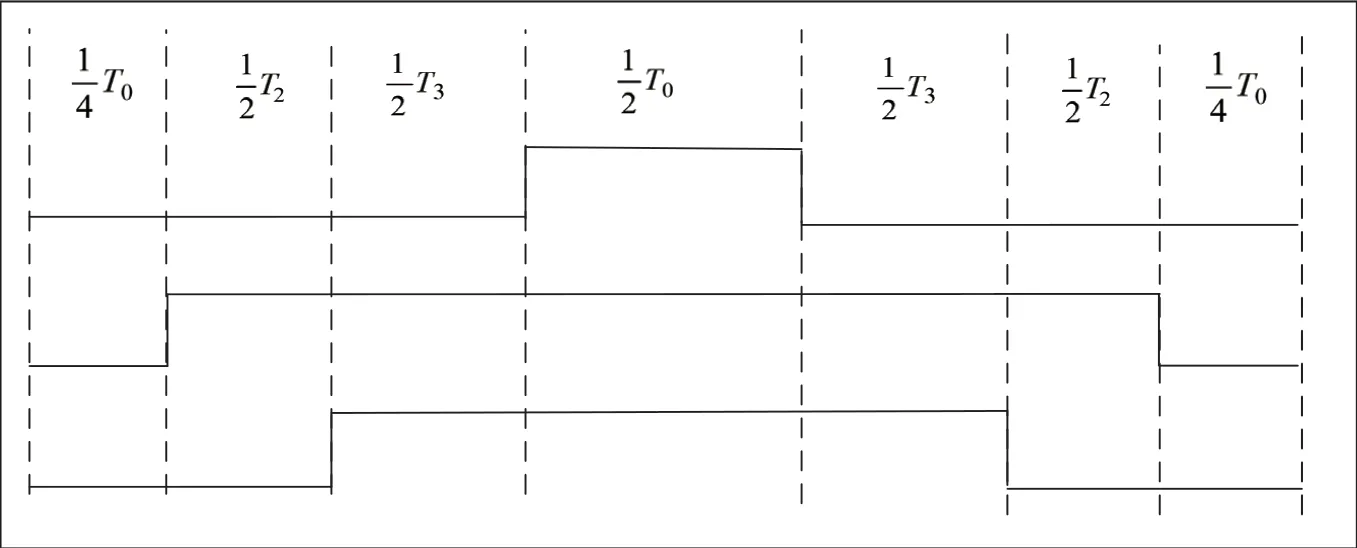
图6 扇区IV 开关管导通时间
根据表1 可知,基本电压矢量1V和 3V两个磁轴承线圈的状态如表7 所示。
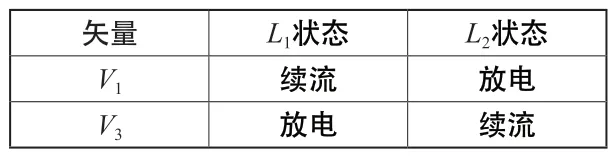
表7 扇区IV磁轴承线圈状态
根据表7 两个磁轴承线圈状态可知:
由于磁轴承线圈 1L和 2L在基本电压矢量 1V和 3V的作用下为放电,则有:
将式(26)代入式(27)可得:
(5)V 扇区
V 扇区有基本电压矢量 1V和 5V组成,各基本电压矢量在开关周期内的作用顺序和时间如图7 所示。

图7 扇区V 开关管导通时间
根据表1 可知,基本电压矢量 1V和 3V两个磁轴承线圈的状态如表8 所示。

表8 扇区V磁轴承线圈状态
根据表8 两个磁轴承线圈状态可知:
由于磁轴承线圈 2L在基本电压矢量 1V和 5V的作用下为放电,则有:
将式(30)代入式(31)可得:
(6)VI 扇区
VI 扇区有基本电压矢量 4V和 5V组成,各基本电压矢量在开关周期内的作用顺序和时间如图8 所示。
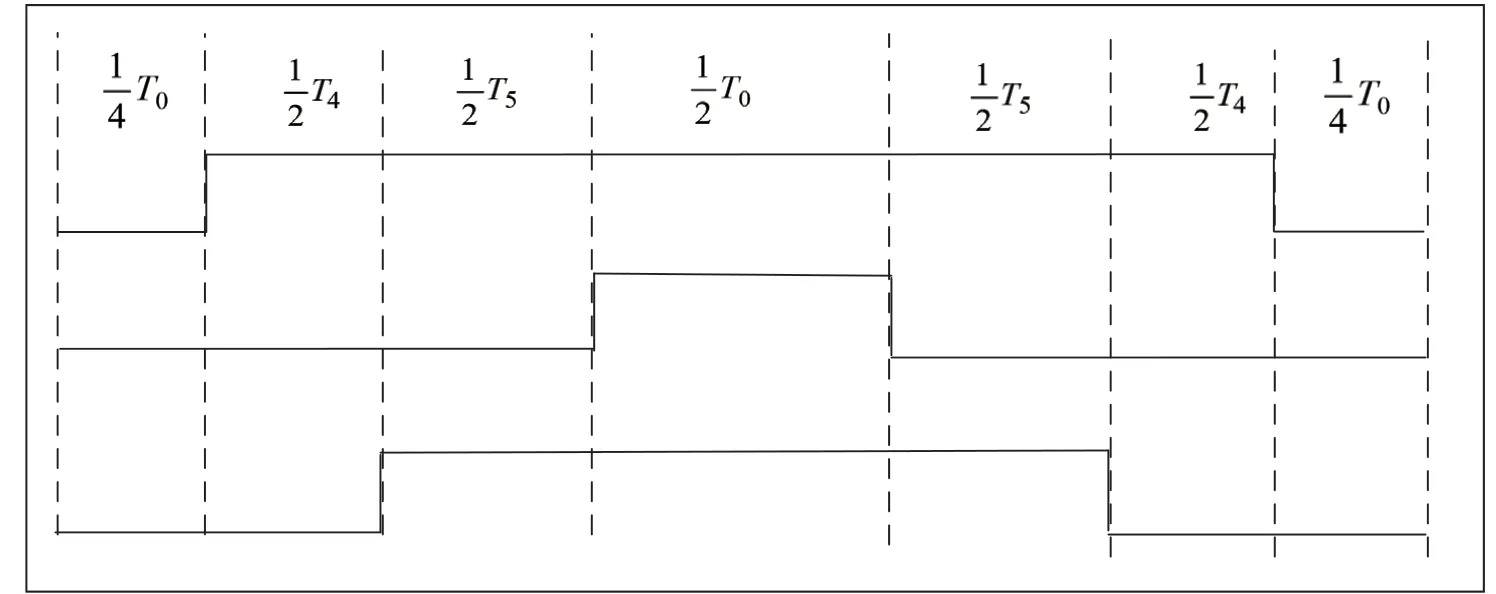
图8 扇区VI 开关管导通时间
根据表1 可知,基本电压矢量 1V和 3V两个磁轴承线圈的状态如表9 所示。

表9 扇区VI磁轴承线圈状态
根据表9 两个磁轴承线圈状态可知:
由于磁轴承线圈L2在基本电压矢量V5的作用下放电,则有:
将式(34)代入式(35)可得:
2.4 各桥路比较值计算
得到各桥路状态切换时间后需要将时间转换成比较值与三角载波计数值进行比较,则三个桥臂的比较值计算如下:
3 仿真验证
为了验证本文提出的控制策略的有效性,在Matlab/Simulink 环境中搭建仿真模型对基于SVPWM 的永磁偏置磁悬浮轴承功率放大器进行了仿真验证。为了模拟一台永磁偏置磁轴承线圈绕组,采用L=12mH,R=5 Ω 的电感线圈作为负载,母线电压U=310V,开关频率为fs= 10kHz。整体结构模型如图9 所示,主要包括信号发生器,电路环控制模块、脉宽调制生成模块以及三桥臂功率放大电路、电流传感器。
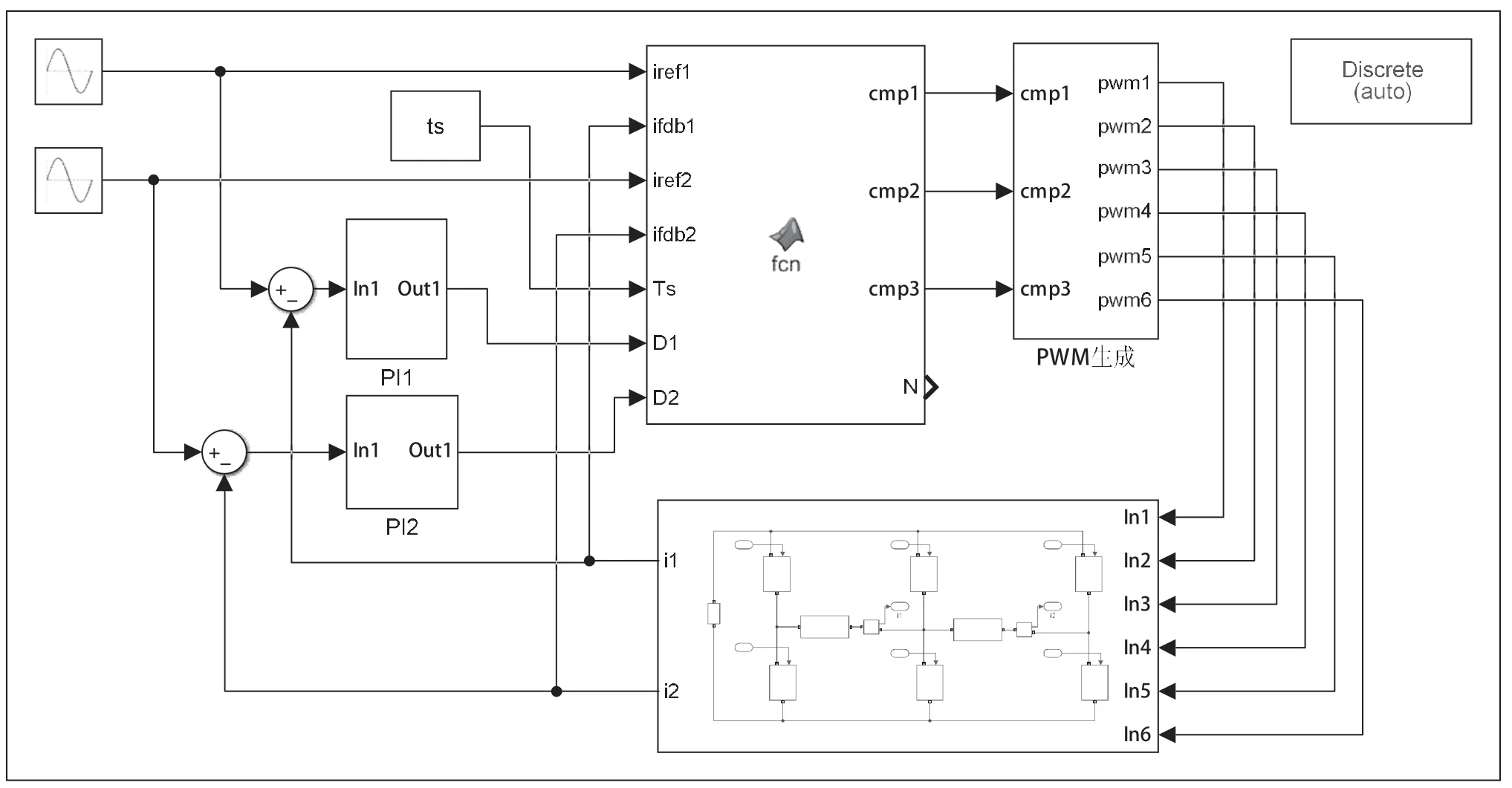
图9 基于SVPWM 的磁轴承开关功放仿真模型
为了验证该算法的可行性,分别给定磁轴承线圈 1L幅值电压幅值为1A、频率为200Hz;磁轴承线圈幅值电压幅值为1A、频率为300Hz 的正弦信号,进行仿真验证,仿真结果如图10 所示。

图10 正弦信号仿真波形
由仿真结果可知,虽然两路输出公用一个桥臂,但是两路负载中的电流却可以互相独立的进行控制,并且都能很好的跟踪各自的波形信号。
4 结论
本文基于对称形式的SVPWM 控制策略设计了一种磁轴承功率放大器,仿真验证了此功放可以同时控制两个自由度的磁轴承线圈,由于两路输出公用一组桥臂,在减少功率开关管的同时改善了系统纹波,仿真结果表明本文提出的SVPWM 磁轴承开关功率放大器可减少功率放大器的数量,减小功率硬件板的体积,提高系统可靠性。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年22期)2016-04-12 00:19:58
新高考·高一物理(2016年1期)2016-03-05 22:47:39
计算机技术与发展(2016年10期)2016-02-27 00:44:08
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58