某型SPMT 车组重载条件下的运动性能测试
2023-05-27 09:12董赞
科技资讯 2023年24期
关键词:高精度
董赞


摘要: 为验证某型SPMT 车组能够实现某型新船舶巨型总段的平移和高精度对接作业,满足相关国军标(GJB)关于建造定位精度的要求,实验在某型SPMT 车组重载条件下以模拟SMPT 车组承载某型新船舶巨型总段进行平移对接作业。结果表明,该SPMT 可以实现相关GJB 关于建造定位精度的要求,为采用SPMT 实现该类船舶的巨型总段建造工法对接提供了重要参考。
关键词: SPMT 巨型总段 总段对接工艺 高精度
中图分类号: U44 文献标识码: A 文章编号: 1672-3791(2023)24-0082-04
1 测试目的
对比验证某型SPMT 厂家测试报告,验证并进一步量化车辆的误差,包括:机构运行误差、重载情况下因误差引起的车体直线度的变化、实际的升降速度和行驶速度,验证该型SPMT 车组重载条件下是否满足《水面舰船船体建造精度要求》(GJB 3182—1998)、《舰船通用规范0 组舰船总体与管理》(GJB 4000—2000),所要求的船舶分段、总段装配偏差(设计水线长L 在120~160 m的,中线偏差±3 mm,前后位置偏差±4 mm,水平偏差±6 mm)[1-3]。
2 测试SPMT 车组
该型SPMT 两纵列20 轴,包括1 个PPU(7.2 t)、2 个6 轴单元(48 t)、2 个4 轴单元(32 t),起重机配重若干(460 t),总计547.2 t,轴载27.36 t。
3 SPMT 厂家测试报告
如图1 所示为该型SPMT 出厂测试结果,其行驶定位精度及最小速度分别为2 mm和14 cm/min(2.3 mm/s,12 轴线,210 t 荷载下)。该型SPMT 在船舶模块制造工程领域中的最大最新实践成果(2009 年)为12 300 t 船舶模块对接工程[4]。
4 各测试科目
4.1 转向单元车轮转角误差测试
4.1.1 测试内容
(1)八字转向模式。该型SPMT 第一轴转角为0°、30°和60°时各个转向单元车轮的实际转角。
(2)平行转向模式。该型SPMT 第一轴转角为0°、30°和60°时各个转向单元车轮的实际转角。
4.1.2 测量步骤
(1)布置电脑型全站仪进行以下数据测量。
(2)如图2 所示,在20 轴SPMT 上建立基准线。
(3)如图3 所示,在轮胎轮毂水平最大外径处,选择两点并标记。
(4)依次测量各个车轮轮毂的a、b 尺寸,则轮胎转角计算公式为
(5) 如图 4 所示,将测量的数据导入EcoBlock 软件内,在软件内将测得的数据进行分析。
4.1.3 测试结果
表1 为数据节选汇总“八字”“平行”转向的测试转角和误差测量结果。
4.2 重载行驶时车体直线度的变化量
4.2.1 第一项测试
(1)测试内容。
该型SPMT 车重载行驶时车体直线度的变化量需要做的第一项测试主要包含以下内容:第一,直线行驶时的直线度的变化量;第二,转弯时的直线度的变化量(第一轴转角分别为30°和60°)。
测试步骤具体分为:第一,在该型SPMT 车板上固定高强度尼龙线;第二,用张紧器绷紧尼龙线;第三,在车组车板的纵向中心附近固定一条钢板尺,选择一个基准刻度与绷紧尼龙线重合;第四,操作SPMT 车组以一定速度行驶;第五,用DV 拍摄行驶中尼龙线在钢板尺上的移动范围。
(2)测试结果。
该型SPMT 车重载行驶时车体直线度的变化量通过以上测试,可以得出以下结果。第一,当车组直线行驶时,直线角度的变化量为零。第二,车组转弯时,在车轮变化转向角的情况下,28 000 mm 车长直线度变化量最大为3 mm;在轮胎转角恒定的情况下,直线度变化量为零。第三,量具最小刻度为0.5 mm,重载车辆行驶稳定速度。
4.2.2 第二项测试
(1)测试内容。
该型SPMT 车重载行驶时车体直线度的变化量需要做的第二项测试主要测试内容包含以下内容:第一,重载车辆行驶最低稳定速度;第二,重载车辆行驶最高稳定速度。
对重载车辆行驶最低稳定速度进行测试,具体步骤主要包含以下几方面内容。
第一,定义车辆前后方向;第二,安装位移传感器,采用单只位移传感器固定在车辆尾端,位移传感器钢丝绳一端固定在支架端,安装时保证钢丝绳出线为水平出线;第三,初始化并标定初始位置,与实际位置测量做记录,在程序内做线性标定及处理;第四,通过参考程序数据显示,采集运动时间、距离,保证数据采集有效时开始做测试。
对重载车辆行驶最高稳定速度主要测试步骤,具体如下:第一,在地面标记40 m 距离的起止线;第二,车辆经过起点标记时已经达到匀速;第三,记录车辆通过终止线的时间,计算出车辆行驶稳定速度。
(2)测试结果。
经数据整理得到结果如表2、表3 所示。
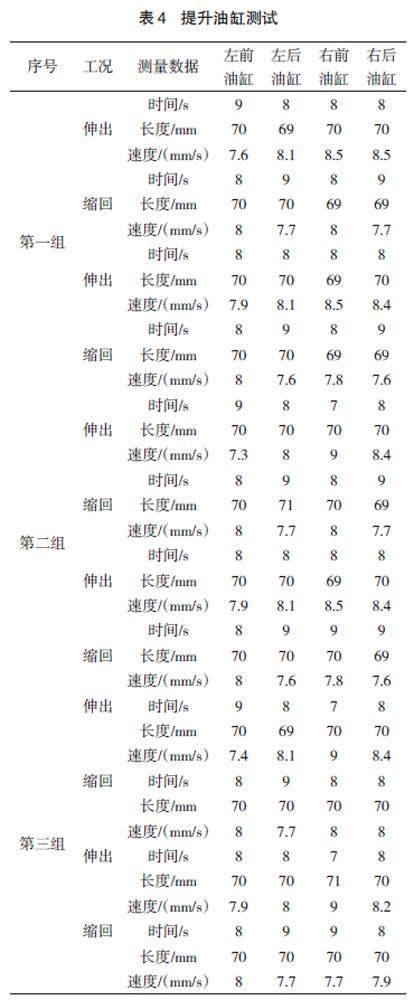
4.3 液压升降的同步性测试
4.3.1 测试内容
通过测试车辆同步起升和同步降落的速度来分析液压升降的同步性,每项测量3 次取平均值。
4.3.2 测试步骤
对测试车辆同步起升和同步降落的速度可按以下步驟进行:首先,确定车辆前后左右方向,选车组前后左右4 个角作为测试点,并命名为左前(A)、左后(D)、右前(B)、右后(C);其次,如图5 安装拉线位移传感器,安装时保证拉线处于竖直方向,使液压缸伸缩速度与位移传感器伸缩速度同步,根据测试时间内的液压缸位移计算出液压缸的伸缩速度;再次,调节节流阀使升降速度相同;最后,针对测试所得出的数据进行采集及处理[5-6]。
4.3.3 测试结果
经数据整理得到结果如表4 所示。
4.4 重载时精确定位实操
4.4.1 测试内容
如图6 所示,操纵重载SPMT 车组,将SPMT 尾部的桁架臂孔与地面布置的桁架臂孔对位配合,使这4 组铰座孔能同时顺利穿销装配[5]。
4.4.2 测试步骤
重载时精确定位测试主要步骤如下:第一,需要将SPMT 车组平板上放置一节桁架臂;第二,在距离地面上1 400 mm 高度上放置另一节桁架臂;第三,利用全站仪测量,将放置在地面的桁架臂调整到水平位置;第四,操作SPMT 车组,并利用两台全站仪,辅助测量定位;第五,调整SPMT 车组位置,直至完全对位并装配。
4.4.3 测试结果
通过全站仪辅助定位,在完成定位后,桁架臂销轴孔直径为55 mm,桁架臂销孔可在无径向力辅助下插入3 个直径为54 mm 和1 个直径为53 mm 的销轴。
5 结语
当该型SPMT 车组重载条件下,通过精密仪器辅助,车组行驶定位精度为±2 mm,液压升降具有较好的同步性,可以实现相关国军标(GJB)关于建造定位精度的要求。
参考文献
[1] 伍赛特. 联合动力装置在水面舰船领域的应用研究及前景展望[J]. 上海节能,2023(5):614-625.
[2] 张磊,王保青,李军. 舰船通用质量特性设计分析研究[J]. 船舶,2019,30(5):96-104.
[3] 朱英富,熊治国,袁奕,等. 现代水面舰船技术发展思考[J]. 中国舰船研究,2022,17(5):1-8.
[4] 刘以高,陈浩,尹志双. 基于流程优化的船舶高效建造技术[J]. 船舶标准化工程师,2020,53(5):40-47,64.
[5] 黎峰,沈立宁,李健,等. 散货船快速改装运载集装箱的系固设计及应用[J]. 船海工程,2023,52(1):30-35.
[6] 秦菡,张峻,李华彦,等. 顾及限高限重的公路大件运输方案设计[J]. 地理空间信息,2021,19(9):133-135,8.
猜你喜欢
电子测试(2018年23期)2018-12-29
测控技术(2018年12期)2018-11-25
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
制造技术与机床(2017年2期)2017-05-04
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10
深空探测学报(2015年3期)2015-12-07