
基于MOPSO算法的水电机组开机过程多目标优化
2023-05-26 12:25:50段文华吕延春吕怡静陈启卷
中国农村水利水电 2023年5期
段文华,吕延春,郑 阳,吕怡静,陈启卷,姚 琛
(1.国网浙江省电力有限公司紧水滩水力发电厂,浙江 丽水 323000; 2.武汉大学动力与机械学院,湖北 武汉 430072)
0 引 言
近年来,随着可再生能源的快速发展,电网新能源渗透率的增加[1],电力系统的稳定性问题成为焦点。水电是一种技术成熟、运行可靠的清洁可再生能源,其负荷处理能力强、电能波动小、对环境影响小[2]。与燃气机组相比水电启停灵活迅速,对未来电网频率调节具有重大意义,提高水电机组启动和停机过程的快速性和稳定性至关重要。
机组开机过程的品质受导叶开启规律主导,空载开机需兼顾快速性和稳定性,目前针对快速性的研究较多。古志等[3]以机组转速的误差绝对值乘时间积分(ITAE)作为目标函数对PID调速器参数进行优化,在一定程度上改善了机组的动态性能。刘志淼等[4]提出了一种考虑水轮机开机时间和超调量的综合性能指标,利用粒子群算法对闭环开机特性进行优化,得到了较好的效果。张官祥等[5]将标准ITAE指标和转速超调量综合成一个目标函数,对导叶开启的开环和闭环参数进行优化,获得了更优的过渡过程。寇攀高[6]等将转速超调量作为惩罚项纳入标准 ITAE 形成单目标函数,提出了一种菌群-粒子群优化算法对调速器 PID 参数进行优化整定,实现了性能优良的过渡过程。但如果导叶开启不当,易造成转轮动应力、扭振、轴向水推力等急剧变化,引发转轮裂纹和关键部件的疲劳损伤[7],该类研究目前较少,需进一步探讨。综上所述,已有的研究成果仍存在一些不足:①优化过程中往往是将多个目标以加权形式聚合形成单一目标,存在局限性,较难同时处理多个博弈目标[8,9],难以反映不同目标之间的矛盾;②多数优化聚焦于在机组开机的转速上升过程,忽略了机组部件存在的机械振动和水压波动,而开机过程的平稳性依赖于机组机械部件的可靠性和安全性。在此基础上本文提出了一种基于非线性模型的水电机组开机多目标优化方法,综合考虑开机过程中的转速上升、压力波动和机械振动之间的博弈关系,得到帕累托最优解集,优化解集获得了良好的效果,提升了机组开机过程的控制性能,为提高水电机组开机过程的动态品质提供了技术支撑。
1 水电机组调节系统模型
本文建立了混流式水电机组的调节系统非线性模型,主要包括引水系统、微机调节器、执行机构、水轮机、发电机5个模块,模型结构如图1所示。
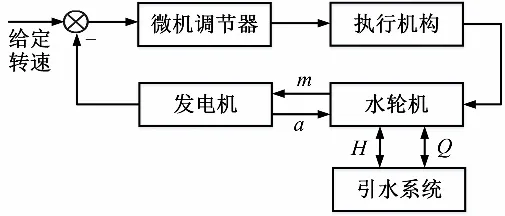
图1 混流式水电机组调节系统模型结构示意Fig.1 Structure diagram of regulating system model of Francis turbine unit
1.1 引水系统
机组开机时,运行状态变化较大,引水系统中的流量和水头的瞬态行为对动态控制过程的影响不可忽略[10],为了准确描述系统的水力和机械特性,本文采用了特征线方法建立引水系统模型。
利用特征线方程对压力管道非恒定流的基本运动方程和连续方程进行转换,得到下列公式:
CP=HA+BQA-R|QA|QA;CM=HB-BQB+R|QB|QB;B=agA;R=fΔx2gDA2
式中:C±代表水锤方向;Hi和Qi分别代表管道节点的水头和流量;i=A,B,P;a为水击波速;D为管道直径;A为管道截面积;f为摩擦系数;∆x为仿真步长;g为重力加速度。
考虑到管道较长,在空间上将其分为N段,每个节点用序列号i(i=1,2,…,N+1)表示,每段长度为∆x,将式(1)代入对划分后的管道及其边界进行描述,即可迭代求解全管道水头及流量变化。
1.2 微机调节器
微机调节器根据采用实际中常用的并联型PID控制器,结构如图2所示。

图2 并联型PID控制器结构图Fig.2 Structure diagram of parallel PID controller
水轮机PID调节器的传递函数可表达为:
式中:KP、KD、KI分别为比例系数、微分系数、积分系数;nc为给定转速;n为实际转速;e为转速偏差。
1.3 执行机构
电液随动系统是调速器的执行器,其主要功能是根据调速器控制信号调整主伺服电机行程,进而控制导叶开度,调节进水流量,实现水轮机转速的调整。执行机构主要由放大元件、主分配阀、主接力器等非线性元件组成,传递函数框图如图3所示。

图3 执行机构传递函数框图Fig.3 Block diagram of actuator transfer function
1.4 水轮机
水轮机全特性曲线揭示了水轮机转矩、流量和导叶开度、转速、水头之间的关系,水轮机在不同工况下的转矩和流量数值一般从模型综合特性曲线得到。在过渡过程计算中,需要将模型综合特性曲线转换为单位流量与单位力矩的变化曲线,描述如下:
式中:Q11为单位流量;M11为水轮机单位力矩;a为导叶开度;n11为水轮机单位转速。
水轮机相似方程描述如下:
式中:Q为水轮机过流量;Mt为水轮机动力矩;D1为水轮机转轮直径;Ht为水轮机工作水头。
1.5 发电机
发电机采用简化的发电机一阶模型,如方程(7)所示:
式中:Ta为机组惯性时间常数;nr为机组额定转速;n为相对速度;en为机组的综合自调节系数;mt为主动力矩;mg为阻力矩。
2 多目标优化算法
2.1 目标函数
以往的研究中学者们大多数把注意力聚集在转速相关的指标,如转速上升时间、超调量、转速ITAE等,而忽略了开机过程中机组的水力和机械振动。但在过渡过程中,保证机组和管道系统的安全性和可靠性意义重大。为了抑制机组开机过程中产生的水力和机械振动,本文将蜗壳进口处的水压波动和轴向水推力纳入目标函数中,将转速相对误差绝对值积分J1、蜗壳水压相对误差绝对值积分J2和最大轴向水推力相对值J3作为机组开机多目标优化的目标函数,即:
式中:k为采样总数;i表示采样点;n(i)表示采样转速值;n(∞)表示转速稳定值;Hv(i)表示采样蜗壳水压值;Fw(i)表示采样轴向水推力;Fwr表示额定工况下的最大轴向水推力;Hv_a表示蜗壳水压平均值,其值轴向水推力Fw的计算方法参考赵玺等[11]提出的公式,其表达式如下:
式中:D1为转轮标称直径;n为转轮转速;Q为过机流量;H为工作水头;λ为修正系数,本文在机组开机过程中取为0.7。
目标函数的第一个目标J1为机组转速相对误差绝对值积分最小化,第二个目标J2为蜗壳水压相对误差绝对值积分最小化,第三个目标J3为最大轴向水推力相对值最小化。
2.2 决策向量
本文研究的是“导叶直接开启+PID控制”的开机规律,如图4所示,导叶先以既定速度快速开启至Y1,保持一段时间后以最快速度回关,当机组转速达到90%,调速器进入空转运行,启动PID调节,随后将导叶开度调整至C点。选取机组PID控制器的比例、积分、微分3个参数,导叶最大空载开度限制线Y1及对应的导叶上升时间t1,导叶开始回关的时间t2,投入PID调节的开度Y2及对应的时间t3作为优化参数,构成决策向量θ=[KP,KI,KD,Y1,Y2,t1,t2,t3]。

图4 开机过程导叶开启规律Fig.4 Guide vane opening rule during start-up process
2.3 约束条件
约束主要针对调节时间ta和决策变量θ,限制如下:
式中:Tu为调节时间上限;θl为决策变量的下限;θu为决策变量上限;θl=[0,0,0,0.15,0.12,5,20,20],θu=[5,1,1,0.3,0.2,20,40,50]。
2.4 多目标粒子群优化算法
粒子群(PSO)算法是基于群智能的优化算法,相较于传统梯度优化算法,粒子群算法适用范围广泛,拥有较强鲁棒性和扩充性,搜索速度快[12-14]。基于PSO的性能优势,不少研究者提出基于PSO的多目标优化算法,其中基于Pareto支配策略[15]的多目标粒子群优化(MOPSO)算法发展迅猛。基于MOPSO算法,根据开机规律优化的目标函数对调速器参数及导叶开启规律参数进行优化,得到帕累托最优前沿,具体流程如下:
步骤1:设置MOPSO算法参数,包括最大迭代次数M、种群规模N、外部档案集规模NRep、惯性权重w、惯性衰减系数wdamp、个体学习系数c1、全局学习系数c2,及决策变量中待优化参数的取值范围;
步骤2:依据决策变量的上下限初始化决策变量的最初位置值θi(k),当前迭代次数k=1,i=1,…,N,N为粒子群大小;
步骤3:计算目标函数转速相对误差绝对值积分J1i(k),蜗壳水压相对误差绝对值积分J2i(k),最大轴向水推力值J3i(k);
步骤4:判断粒子是否满足约束条件,如果满足则跳转至步骤5,否则返回步骤2,直到所有粒子全部满足约束条件;
步骤5:评估所有粒子的适应度函数值,并更新粒子个体最优位置Pbest和全局最优位置Gbest;
步骤6:更新外部档案集,将非支配解插入外部档案集中,将支配解从外部档案集中移除;
步骤7:用公式计算每个粒子的最新速度v(k+1)和最新位置θ(k+1);
式中:v(k)和v(k+1)分别是粒子的当前速度和最新速度;ω为惯性权重;c1、c2为个体学习系数、全局学习系数;r1、r2是[0,1]区间内的随机数;Pbest(k)、Gbest(k)分别是当前的粒子最优位置和全局最优位置;θ(k)和θ(k+1)分别是粒子的当前位置和最新位置。
步骤8:判断是否达到最大迭代次数,若满足,则终止过程,输出帕累托前沿。
3 工程实例
以我国华东地区某混流式水电站为例,利用MOPSO算法对机组正常水头工况下的开机规律和PID控制参数进行多目标优化,分析对比帕累托前沿中几个非支配解之间的控制能力和主导优势,阐述MOPSO在实际应用中的灵活性和优越性。该电站额定水头工况下,额定水头69 m,额定转速200 r/min,额定出力56.7 MW,机组转动惯量4 040 t/m2。MOPSO算法中,最大迭代次数M=200,种群规模N=50,外部档案集规模NRep=50,惯性权重w=0.5,惯性衰减系数wdamp=0.9,个体学习系数c1=1,全局学习系数c2=2。
优化得到的帕累托前沿如图5所示,不难看出,MOPSO的优化效果是良好的,帕累托前沿分布均匀、有序,具有明显的收敛性。并且,帕累托解集综合了转速相对误差绝对值积分、蜗壳水压相对误差绝对值积分和最大轴向水推力值3个目标,在考虑转速平稳上升的同时,均衡了水压波动、轴向水推力对机组带来的影响。MOPSO使水电机组在抑制水力-机械振动的前提下优化转速上升过程,为电站的安全平稳运行提供了有效的决策支持。

图5 MOPSO算法帕累托前沿Fig.5 The MOPSO pareto front
为了比较帕累托前沿中不同解之间的差异性,我们选择其中4组解进行分析,4组解的选择方式如下:
将50个前沿粒子从1到50进行编号。将50个粒子对应的目标函数转速相对误差绝对值积分J1、蜗壳水压相对误差绝对值积分J2、最大轴向水推力相对值J3归一化,得到计算50个粒子的中的最小值对应的粒子即为被选择的解:
方案1:取w1=w2=w3=1/3,J’最小值对应的为解1。
方案2:取w1=0.5,w2=w3=0.25,J’最小值对应的为解2。
方案3:取w2=0.5,w1=w3=0.25,J’最小值对应的为解3。
方案4:取w3=0.5,w1=w2=0.25,J’最小值对应的为解4。
机组转速的相对误差绝对值积分、蜗壳水压相对误差绝对值积分和最大轴向水推力相对值这3个目标函数分别反映机组实际开机过程的转速上升、压力波动和机械振动的情况。权重系数选取依据工程经验所得,其数量大小反映了侧重的优化目标,某项指标的系数相对越大,表示越重视对其的优化效果。方案一是将“提高转速上升的快速性和稳定性”、“抑制管道水压波动使其尽快稳定”和“抑制轴向水推力波动以减小机械振动”这三项目标视为同等重要,方案二则侧重“转速上升的快速平稳”,方案三侧重“蜗壳处水压波动的平抑”,方案四则侧重“最大轴向水推力的平抑”。
4个方案选出的解对应的开机参数如表1所示,对应的过渡过程如图6所示。

表1 多目标优化开机最终方案参数Tab.1 Final parameters of multi-objective optimization start-up scheme

图6 机组开机过程状态曲线Fig.6 State curves of start-up process
通过分析表1中的数据和图6的开机过程状态曲线,可以得出以下结论:①本文提出的基于MOPSO算法的开机规律多目标优化策略,获得了良好的效果,提升了机组开机过程的控制性能,4种典型方案对应的转速均平稳上升且在75 s内达到稳定,无超调和振荡现象。②机组的转速相对误差绝对值积分、蜗壳水压相对误差绝对值积分和最大轴向水推力相对值这3个目标函数是互相矛盾的,无法同时达到最优。方案二最快达到机组稳定时间(本文指转速达到并持续稳定在±2%的误差范围内的最小时刻),用时47.04 s,但其水压波动的剧烈程度和最大轴向水推力都是4个方案中最大的,J2和J3的数据和开机状态曲线可互相印证;方案三较好地抑制了机组和管道内部的水压波动,但略微牺牲了转速上升的快速性,机组稳定时间为65.56 s;方案四具有最小的最大轴向水推力相对值,水压波动的抑制能力也较强,但其转速稳定时间长达72.48 s,是4个方案中用时最长的;方案一则完全均衡地考虑了3个目标函数,其在转速稳定上升、水压波动抑制、轴向水推力抑制的效果均处于良好的状态。电站运行人员可根据实际情况选择合适的开机方案。
4 结 论
为提高水电机组开机过程的动态品质,提出了一种基于非线性模型的水电机组开机多目标优化策略,综合考虑机组开机过程中对水压波动和机械振动的抑制,利用MOPSO算法对导叶开启规律进行优化,获得了良好的效果,得到结论如下。
(1)建立的混流式水电机组的调节系统非线性模型,可以精确描述过水系统和水轮机结构的过渡状态,贴近机组实际运行情况,更加精确地描述机组开机的动态响应过程。
(2)提出的水电机组开机规律多目标优化策略,可以有效提升机组过渡过程的动态品质,在保证转速平稳快速上升的同时平抑压力波动和机械振动,提高机组的可靠性,延长机组寿命。
(3)基于MOPSO算法得到的帕累托最优解集,能有效指导水电机组过渡过程的优化控制,为机组的优化开机提供有力的技术支持,电站运行人员可根据实际情况对最优解进行针对性选择。
猜你喜欢
小学时代·科学小问号(2024年12期)2024-12-28 00:00:00
水利科学与寒区工程(2023年8期)2023-09-05 14:05:32
大电机技术(2022年3期)2022-08-06 07:48:56
发明与创新(2021年39期)2021-11-05 07:15:36
大电机技术(2021年3期)2021-07-16 05:38:24
装备制造技术(2020年4期)2020-12-25 05:26:00
模具制造(2019年4期)2019-06-24 03:36:50
水电站机电技术(2016年1期)2016-02-28 14:21:50
冶金经济与管理(2015年1期)2015-02-28 21:08:51
水利水电科技进展(2014年2期)2014-10-17 03:22:10
