基于THERP可变功能机械功能转换过程评价
2023-05-26 06:17王圣辉贺华波
宁波大学学报(理工版) 2023年3期
王圣辉, 贺华波*
基于THERP可变功能机械功能转换过程评价
王圣辉1,2, 贺华波1,2*
(1.宁波大学 机械工程与力学学院, 浙江 宁波 315211; 2.浙江省零件轧制成形技术研究重点实验室, 浙江 宁波 315211)
可变功能机械额功能转换过程设计是该类产品设计开发的一个重要环节, 其设计结果不仅决定产品功能的实现与否, 还会对诸如安全性、经济性等非技术类问题造成影响, 目前还缺少专门针对此过程设计解的分析及评估方法. 为解决此问题, 结合人失误概率预测技术(Technique for Human Error Rate Prediction, THERP)模型及风险概率与经济性安全评价对功能转换过程进行定量分析. 依据THERP模型将功能转换过程划分为一系列子任务, 并建立功能转换过程二叉树, 同时按照功能转换过程的特点对二叉树进行简化, 接着评估各失误路径的发生概率及失误严重度, 并将失误严重度量化为经济损失, 最后得到功能转换过程的风险值. 同时通过角磨机向电锯功能转换的过程定量分析, 验证了该方法的可行性.
可变功能; 人失误概率预测技术; 二叉树; 功能转换
现代社会科技的进步使得产品功能不断完善细化, 以满足人们对功能的多样性需求. 然而, 更多的功能往往意味着更多的产品, 繁杂多样产品所造成的不便促使人们寻找既能实现多个功能又相对结构简单、紧凑的单一产品. 可变功能机械是一种通过更改构件或者构件间的连接方式以实现多种功能的机械系统[1]. 作为典型的多功能机械, 其既能实现一个产品包含多种功能, 又能满足人们对于产品简化的期许. 但另一方面, 随着功能集成度及机械复杂程度越来越高, 可变功能机械的功能转换过程也相应更为复杂. 与传统机械相比较, 可变功能机械的功能转换过程大多需要用户本人完成, 由于用户的经验、专业技能和知识背景不尽相同, 这大大提高了产品使用的失误风险性. 故而对可变功能机械的功能转换过程进行安全评估, 探讨消除或减少危险的措施, 对于提高产品的安全性显得尤为必要.
人失误概率预测技术(Technique for Human Error Rate Prediction, THERP)模型是由20世纪80年代初, Swain和Guttmann等开发的一套针对操作人员在某工作环境下及工作过程中动作发生失误概率的预测方法, 以测算该工作过程中人失误可能性[2]. 王全伟等[3]、文豪等[4]运用THERP模型分析正常工作情况下起重机司机的人因可靠性. 邓明明等[5]用THERP分析某企业汽车内饰装配过程的冷媒加工工序, 验证THERP模型的合理性及不足. 陈农田等[6]基于THERP+HCR(Human Cognitive Reliability)综合模型对航空维修差错的人失误概率进行计算. 张建祥等[7]运用THERP-CREAM(Cogni- tive Reliability and Error Analysis Method)通过相似事件来预测空管人因失效概率. 通过以上研究可知, THERP用来预测和评估由于人为差错导致的故障问题有着不错的效果, 而且THERP与时间相关较小的任务较为贴合. 但传统THERP仅仅是给出任务的失误概率, 并没有对人失误及产生相应的后果进行综合评价. 可变功能机械由于具有需用户本人完成功能转换过程的特点, 且与时间的相关程度较低, 与THERP模型较为贴合. 因此本文基于该模型, 同时结合风险概率与经济性对可变功能机械的功能转换过程进行综合评价, 以期为此类产品的设计开发提供相应的技术支持.
1 THERP模型
THERP在人因可靠性方面的优势相当明显. 章逸民[8]曾对人因可靠性的主流分析方法进行综合评价, 认为THERP是得分最高的评价方法, 尤其在可用性、成熟度、可接受性等方面得到满分的评价.
THERP将工作人员的工作过程总任务拆分为一系列连贯的动作或者子任务[9], 接着根据各个子任务所包含的动作类型预测动作的风险性, 进而对总任务的可靠性进行预估. THERP总体过程大致可以分为4个阶段, 分别是系统相关信息的收集阶段、初步定性分析阶段、定量分析阶段以及应用阶段, 下文简要介绍前3个阶段.
1.1 阶段一: 系统相关信息的收集
查阅历史资料, 包含历史事故、历史故障等, 了解机械系统的运作方式, 以及工作人员的工作过程等, 分析历史事故与人员工作过程的关系.
1.2 阶段二: 初步定性分析
该阶段需要将总任务分解成一系列动作或者子任务, 并结合子任务或动作及其相关设备、动作行为、环境限制等影响因素, 为子任务或动作建立相应的事件树. 在完成上述步骤后, 使用二叉树对事件进行描述, 并给出各个子任务或者动作成功或失误的概率, 模型如图1所示.
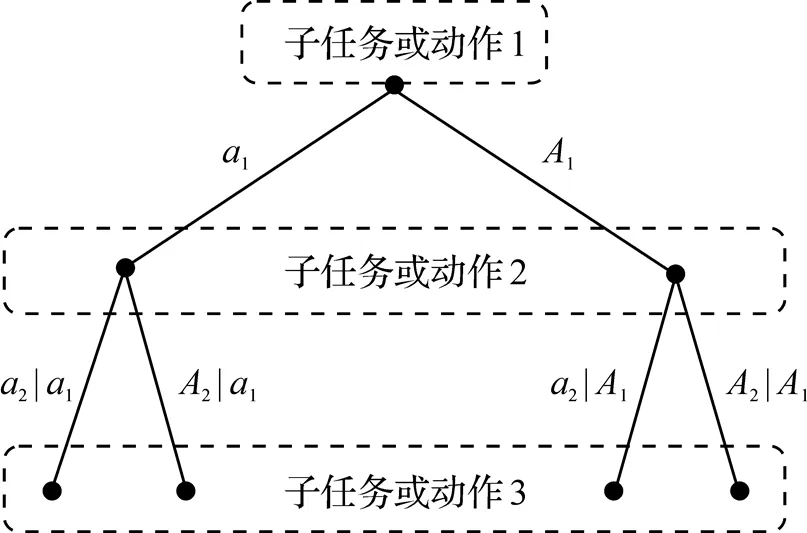
图1 二叉树模型
1.3 阶段三: 定量分析
(1)以图1为例, 串联模式成功概率为:
失误概率为:
(2)若任务为并联模式, 成功概率为:
失误概率为:
(3)修正系数(PSF)

由于每个子任务或动作之间或许存在相关性, 按照Swain手册将相关性分为5个等级, 依次为完全相关(CD)、强相关(HD)、相关(MD)、低相关(LD)以及无相关(ZD), 具体相应任务概率的计算公式如下:
2 基于THERP模型的功能转换过程评价模型
2.1 可变功能机械功能转换相关任务的特点
(1)可变功能机械是多功能机械的一个分支, 其有别于普通多功能机械的特点之一是需要对机械系统进行功能构件的更换或者改变其连接方式, 以获得不同的功能. 因此, 当用户需要转换功能时, 就必须对机械系统进行功能构件的更换或连接方式的改变. 此过程通常需要用户本人完成, 也是本文研究的重点.
(2)用户初次完成功能转换过程出错的概率较高. 用户从取得产品到初次使用, 一般经过以下几个步骤: 1)阅读使用说明书; 2)按照说明书指示进行功能转换; 3)在功能转换过程中出错并纠正, 如此反复; 4)最终完成功能转换. 由此可见, 在用户接触到新产品的使用初期, 出现失误概率较高.
(3)用户在后续的使用中出现失误具有反复性. 由于用户个人的受教育程度、使用环境、使用时间等不尽相同, 因此用户在后续使用的失误情况也呈多样化趋势. 但是各用户在功能转换过程中的失误都具有反复性, 且用户自身也有一定的纠错能力, 能在一定程度上避免后续的功能转换失误.
(4)用户在各子任务上的失误会引起不同后果. 由于功能转换过程可分解为一系列子任务或动作, 那么用户在各个子任务或动作上都有失误的可能, 这些失误可能会导致最终的功能转换失败, 但用户仍有可能继续使用, 进而产生一定后果.
2.2 功能转换过程评价模型
首先依据THERP模型建立功能转换过程的二叉树, 然后按照规则对二叉树的每条失误路径进行筛选, 查询THERP模型相关表格, 获取每条路径子任务或动作失误的概率. 接着对剩下路径上每个子任务或动作按照风险矩阵进行评价并筛选, 随后将每条路径中失误可能导致的事故严重程度转化为风险经济损失, 并计算总风险经济损失, 最后根据总风险经济损失得到功能转换过程的安全状态, 并根据评价结果提出相应的改进措施. 具体评价方法流程如图2所示.
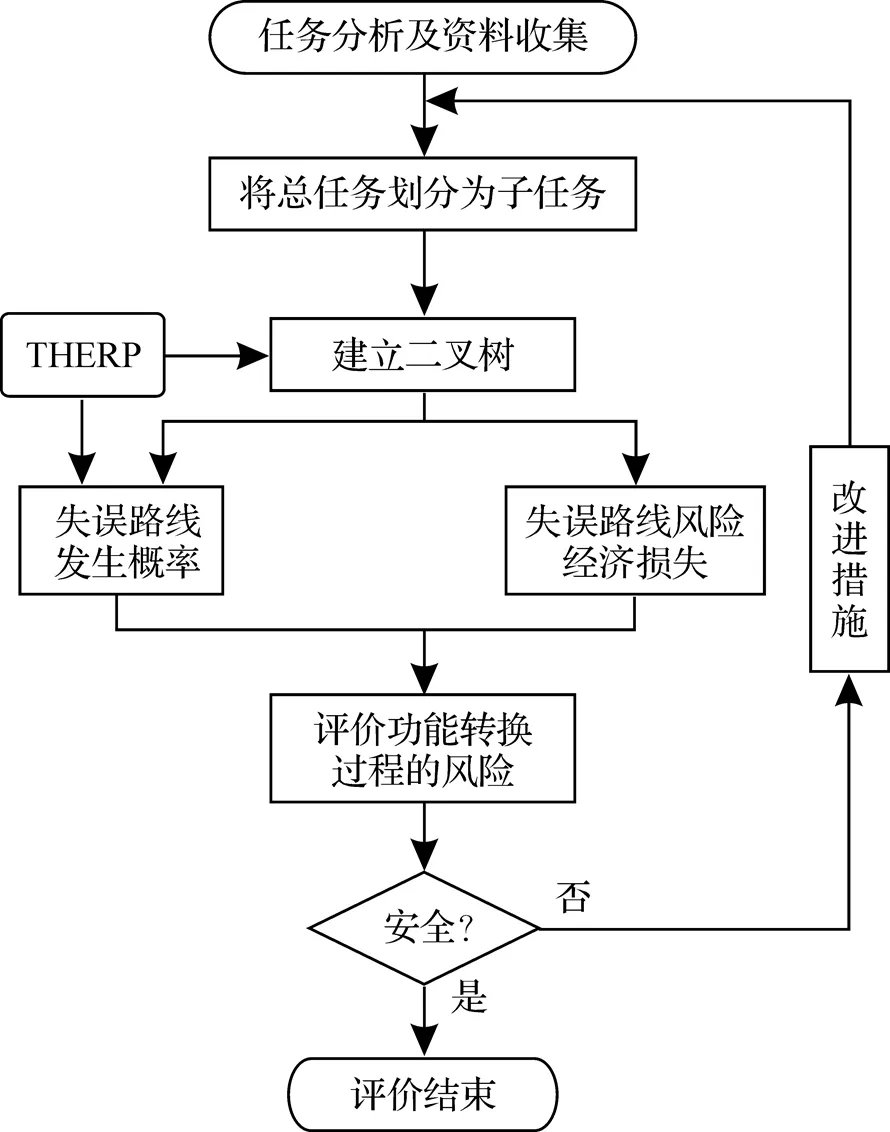
图2 功能转换评价过程
2.3 采用风险评价矩阵对子任务进行筛选
风险评价矩阵作为一种直观有效的风险评估方法, 能根据事故的严重程度以及其发生的概率对某一事故进行初步的评估. 本文通过风险评价矩阵对总任务所划分的子任务或动作进行初步的评价, 筛选出安全概率较高的任务, 从而减轻工作量.
本文以任务的失误严重程度为横轴, 分为非常严重、严重、中等、轻微4个等级. 子任务或动作发生失误的概率为纵轴, 分为概率高、概率中, 概率低、概率非常低4个等级. 将子任务的风险程度分为高、中、低、可忽略4个等级[10]. 可根据风险矩阵对子任务进行初步的筛选(表1).

表1 风险矩阵
2.4 确定二叉树中路径的发生概率
首先熟悉产品资料以及功能转换过程任务, 掌握功能转换的整个过程, 同时分析进行此项任务的各种边界条件, 建立二叉树, 并对简化后的失误路径进行定量分析.
为了对功能转换过程的二叉树中各失误路径进行定量分析, 首先需要对路径进行简化.
2.4.1 二叉树失误路径的简化原则
二叉树失误路径的简化原则需要THERP模型结合可变功能机械功能转换过程的特点制定, 简化原则如下:
(1)规定从任务节点向右为失败, 从任务节点向左或垂直向下为成功;
(3)对二叉树上的子任务进行分析风险矩阵评价, 确定必定成功的子步骤;
(3)对于二叉树的任务节点来说, 如果上一个子任务严重影响到下一个子任务开展, 那么可认定此任务必定成功;
(4)对于二叉树上某个任务节点, 如果其中的一条分支能鉴别出任务的失误或成功, 那么此任务路径将直接被认定失误或成功, 且不需后续的分解;
(5)若总任务为并联模式, 则将总任务转化为多个串联模式.
2.4.2 计算各失误路径的发生概率
按照二叉树定量分析过程对简化后的失误路径进行概率计算.
2.5 风险损失的定量化计算
2.5.1 风险经济性损失
为了量化功能转换过程的风险性, 本文以功能转换过程可能造成的经济损失来量化功能转化过程的风险性. 在考虑功能转换过程可能造成的最大损失以及事故发生的可能性时, 可用事故在被发现前的可能性加以修正, 以得到较为客观的功能转换过程风险评价. 本文采用文献[11]提出的量化方法, 将失误可能对操作人员造成的伤害以及误工时长换算成经济损失, 从而得以衡量功能转换过程的风险性.

可变功能机械的功能转换任务失误路径有多条, 任务第条失误路径的风险程度为路径的失误发生概率与失误路径后果经济损失的乘积, 则功能转换失误子任务的风险度计算公式为:

根据式(2)可以对功能转换各失误路径的风险进行量化.
2.5.2 功能转换过程的风险值修正
由可变功能机械功能转换过程的特点可知, 由于转换过程大多由用户完成, 且用户的受教育水平、技能水平、心理条件等不尽相同, 因此失误路径能否被用户发现也是一项重要的指标, 用户如果能及时发现失误的发生, 并重新完成也能大大降低了此过程的风险值. 故而引入失误路径发现修正系数M用以修正风险值(表2).

式中:为总任务风险值;M为第个失误路径的风险修正系数.

表2 失误路径发现概率
根据式(3)、(4)可以得出整个功能转换过程的风险值, 并按照产品特性设置合适的阈值, 以筛选满足条件的功能转换过程方案, 同时也可根据过程的风险值提出改进措施, 并给出相应评价结果报告.
3 实例
以某品牌角磨机、电锯可变功能机械为例. 该产品将角磨机和电机集合在一起, 通过更换部分部件实现角磨机和电锯两种功能, 成为一机两用的可变功能机械产品(图3). 下文对角磨机向电锯功能转换的过程进行分析.

图3 角磨机(a)与电锯(b)
步骤1 对角磨机向电锯功能之间转换的整个过程进行分析, 可将这一过程分解成以下几个子任务步骤:
(1)下压板替换成链锯带动齿(子任务1);
(2)卡位对准, 将角磨机固定(子任务2);
(3)安装主板铝件, 拧紧螺丝(子任务3);
(4)拆卸护盖螺丝(子任务4);
(5)安装挡板, 拧紧螺丝(子任务5);
(6)安装手柄, 拧紧螺丝(子任务6).
详细过程如图4所示.
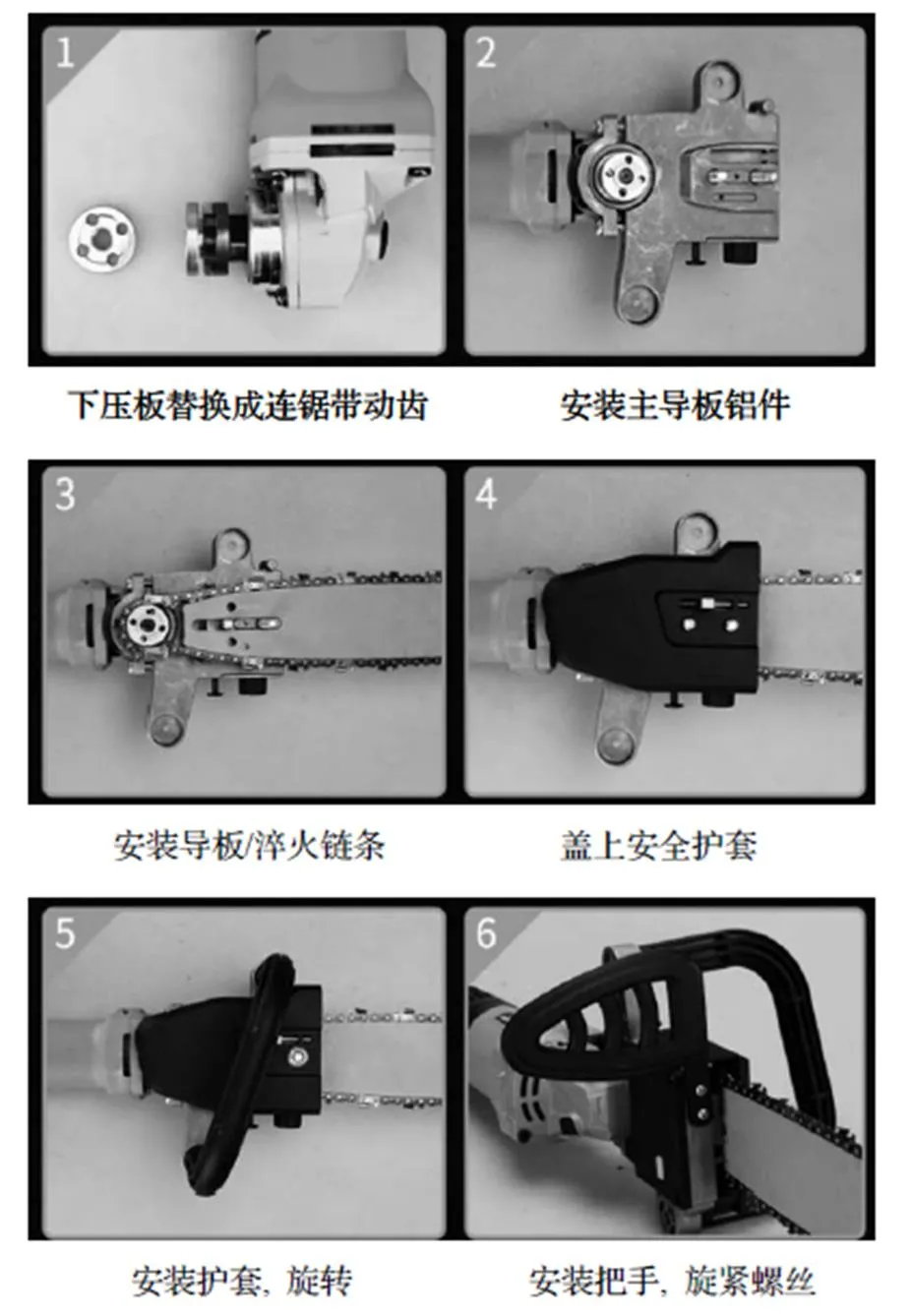
图4 功能转换过程
接着可按照风险矩阵对此6个子任务步骤进行分析(表3), 初步确定其风险等级. 该评定过程通常可由公司中相关有经验的技术人员通过调查完成. 进而确定可忽略等级的子任务, 即子任务4、5视为必定成功.
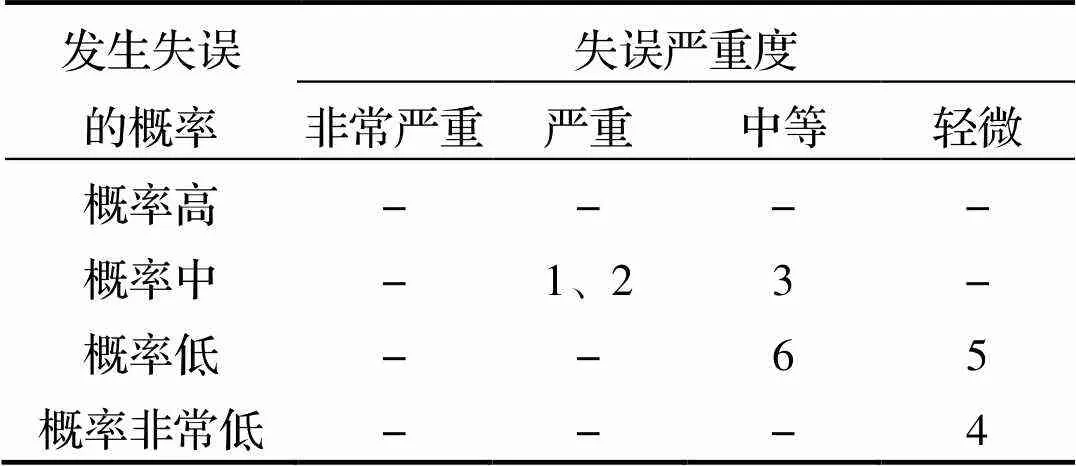
表3 风险矩阵分析
步骤2 建立二叉树模型.
步骤3 按照路径的简化原则对任务流程进行梳理简化. 对于子任务1来说, 如果子任务1发生失误时, 则子任务2将无法正常进行, 也就是说子任务1的失败将严重影响任务2的进行, 即用户在子任务1失误情况下去完成子任务2, 会发现子任务2难以进行, 从而反过来对子任务1进行修正, 故而我们认定子任务1必定成功. 简化后的二叉树模型如图5所示.

图5 简化二叉树模型
从图5可以看出, 失误路径一共有7条路径, 从左至右依次为:
路径1: 子任务1、2、3、4、5成功, 子任务6失败;
路径2: 子任务1、2、4、5、6成功, 子任务3失败;
路径3: 子任务1、2、4、5成功, 子任务3、6失败;
路径4: 子任务1、3、4、5、6成功, 子任务2失败;
路径5: 子任务1、3、4、5成功, 子任务2、6失败;
路径6: 子任务1、4、5、6成功, 子任务2、3失败;
路径7: 子任务1、4、5成功, 子任务2、3、6失败.
查询THERP表格,以相同类别的动作失误概率类比子任务的失误概率, 并计算相应失误路径的失误概率.
每条失误路径的失误概率依次计算为:
设定各失误路径的人因失误概率的修正系数PSF, 按正常情况即不考虑各种压力情况下, PSF取值为1. 各路径相应的事故严重度按式(1)~(4)计算, 接着评估各失误路径的发现可能性, 并取相应的M值, 其相应结果见表4.
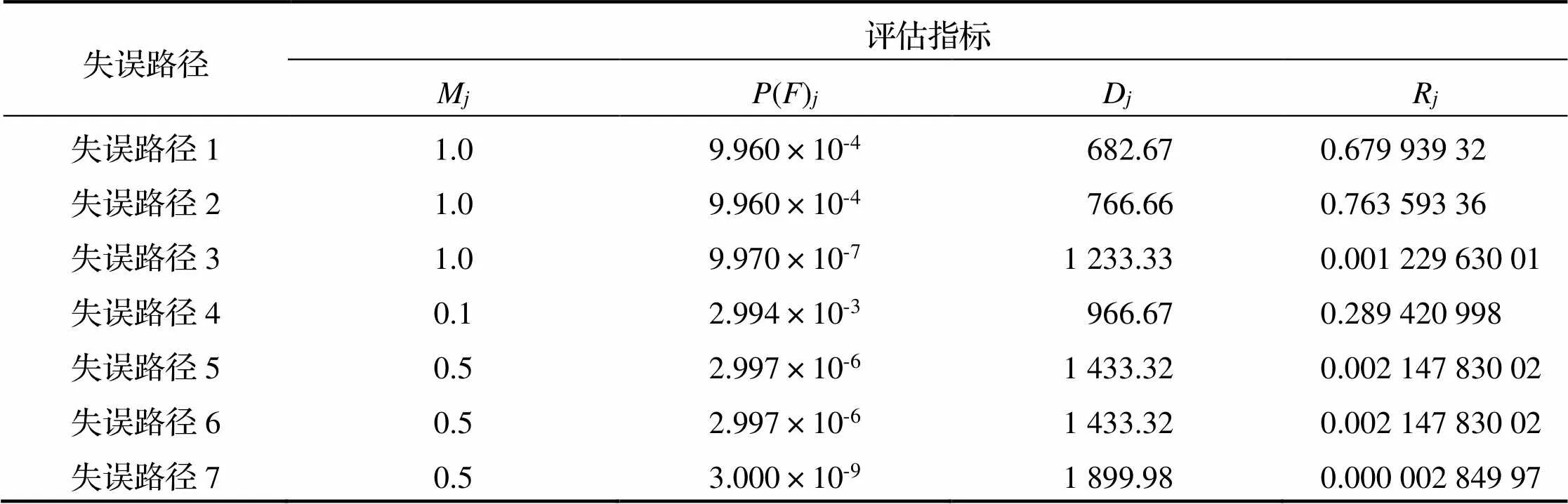
表4 功能转换过程评估结果

4 结果分析
(1)由失误路径4可知, 在失误概率大以及可能引起较为严重后果的情况下, 只要能被用户或其他手段检测到并改正, 就能大大降低失误路径的风险度.
(2)总失误路径的风险值按照设计者本身的要求, 确定是否接受, 不接受就需要对功能转换过程进行优化.
(3)通过THERP数据表查到的数值, 在应用到各个领域时不够准确, 需要设计者按照设计工作需要进行调整, 或者大范围地收集本领域的人因失误概率数据, 可以大大提高准确性.
(4)上述计算过程受各种不同特定条件的影响, 会产生不同结果, 通过计算经济损失的方法在一定程度上可反映功能转换过程的风险性, 也能同时了解并对比各失误路径的风险值. 设计人员可据此对功能转换过程进行优化, 进而使得整个产品系统的设计得以改进.
(5)由于事故的严重度、风险概率需要专家成员的分析与评估, 故而存在一定程度的主观性, 可通过收集行业的资料大数据来提高专家分析评估的准确性.
5 结论
通过结合THERP模型、风险概率和经济性安全评价方法对可变功能机械的功能转换过程进行定量分析. 运用THERP模型对功能转换总任务进行任务划分, 并依据可变功能机械的功能转换过程特点对二叉树模型进行简化. 随后计算各失误路径的失误概率及事故严重度, 同时评估失误路径的可发现性, 最后得出总失误路线的风险值.
功能转换过程的划分及各子任务的风险值计算有助于对比各失误路径的风险值, 为设计者的改进设计提供一条思路; 同时对总失误路线风险值的定量分析有助于对功能转换整个过程的综合评价, 方便设计者进行设计评价与验收.
但定量分析的数据来源具有一定的环境相关性, 相应数据采集也存在一定难度, 使得分析结果还存在一定程度的主观性, 这些方面有待于未来的进一步研究和完善.
[1] 邹长武, 邓益民, 王根华. 基于修正赋权有向图功能结构的可变功能机械建模方法[J]. 机械制造, 2016, 54(1): 1-4; 10.
[2] 张力, 黄曙东, 何爱武, 等. 人因可靠性分析方法[J]. 中国安全科学学报, 2001, 11(3):9-19.
[3] 王全伟, 徐格宁, 文豪. 起重机司机行为建模与操作可靠度分析[J]. 人类工效学, 2016, 22(3):58-65.
[4] 文豪, 刘治宏, 王全伟, 等. 通用桥式起重机驾驶员操作可靠度研究[J]. 中国安全科学学报, 2012, 22(9):63- 68.
[5] 邓明明, 朱郭奇. 检验THERP合理性及不足的实验研究——以汽车冷媒加注工序为例[J]. 工业工程, 2019, 22(1):85-89.
[6] 陈农田, 马婷, 李瑞. 基于THERP+HCR的航空维修差错人误概率计算[J]. 人类工效学, 2016, 22(6):59-63.
[7] 张建祥, 甘旭升, 吴亚荣, 等. 空管人因失效概率的THERP-CREAM预测方法[J]. 航空工程进展, 2022, 13(6):59-68.
[8] 章逸民. 一种简化的事故后人因可靠性分析方法在秦山核电厂概率安全评价中的应用[D]. 上海: 上海交通大学, 2007.
[9] 徐培娟, 彭其渊, 文超, 等. 基于THERP-Markov原理的高铁列调人因可靠性分析[J]. 交通运输系统工程与信息, 2014, 14(6):133-140.
[10] 陈文瑛, 吴穹, 王勇毅. 机械安全性评估方法研究[J]. 中国安全科学学报, 2010, 20(1):77-83.
[11] 卞虹. 产品安全性量化研究[D]. 沈阳: 沈阳航空工业学院, 2007.
Evaluation of function conversion process of adaptable-function mechanical product based on THERP
WANG Shenghui1,2, HE Huabo1,2*
( 1.Faculty of Mechanical Engineering & Mechanics, Ningbo University, Ningbo 315211, China; 2.Zhejiang Provincial Key Laboratory of Part Rolling Technology, Ningbo 315211, China )
The function conversion process of the adaptable-function mechanical product is one of major tasks in the design and development of this specific type of product. The design solution for the function conversion process not only determines the implementation of product functions, but also has repercussions on non-technical issues such as safety and economy. Currently, there still lacks particular method for the analysis and evaluation of the relevant design solutions. To address this problem, this paper carries out quantitative analysis of the function conversion process by integrating the THERP (Technique for Human Error Rate Prediction) model, the risk probability calculation and the economic safety evaluation. With THERP model, the function conversion process is divided into a series of subtasks, and its binary tree is established. and meanwhile simplified by taking the mechanical characteristics of function conversion process into account. Subsequently, the occurrence probability and error severity of each error path are evaluated, and the error severity is quantified as economic loss. Finally, the risk value of the entire task is obtained that is used to evaluate the function conversion process. A case study of the function conversion process from angle grinder to chainsaw is also presented to verify the feasibility of the proposed method.
adaptable function; technique for human error rate prediction; binary tree; function conversion
TH122
A
1001-5132(2023)03-0050-07
2022−11−10.
宁波大学学报(理工版)网址: http://journallg.nbu.edu.cn/
国家自然科学基金(51375246).
王圣辉(1996-), 男, 安徽六安人, 在读硕士研究生, 主要研究方向: 机械设计与理论研究. E-mail: 1178622100@qq.com
通信作者:贺华波(1976-), 男, 浙江宁波人, 博士/副教授, 主要研究方向: 机械设计与理论研究. E-mail: hehuabo@nbu.edu.cn
(责任编辑 章践立)
猜你喜欢
电脑报(2022年37期)2022-09-28
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
现代计算机(2021年14期)2021-07-09
武汉轻工大学学报(2016年4期)2017-01-16
商用汽车(2016年11期)2016-12-19
商用汽车(2016年6期)2016-06-29
商用汽车(2016年4期)2016-05-09