
无人机自主着陆视觉相对位姿测量误差分析方法
2023-05-19 08:22尚克军扈光锋刘崇亮李茜茜
导航与控制 2023年2期
明 丽,尚克军,扈光锋,刘崇亮,李茜茜
(北京自动化控制设备研究所,北京 100074)
0 引言
卫星拒止条件下无人机自主回收是无人机实现快速机动部署与重复使用的关键,是未来无人机发展中一项极具挑战的前沿难题,也是当前国内外研究的热点问题。典型代表包括: 德宇航建议下启动的C2Land 计划[1-6]、法国空客公司的ATTOL 项目、美国通用原子航空系统公司开展的ATLC 实验以及国内北京自动化控制设备研究所提出的着陆视觉导航项目[7-9]等。其关键在于如何自主、实时、精确地获取无人机与着陆场站之间的相对位置与姿态(相对位姿)信息。
目前,常用的位姿测量方法包括: 卫星位姿测量[10]、雷达位姿测量[11]、惯性位姿测量[12]、视觉位姿测量[13-15],根据其测量原理可分为直接和间接相对位姿测量。其中,卫星测量是通过测量载体自身的位置并利用差分获得运动体之间的相对位置关系,具有精度高、稳定性好、成本低、体积小、质量小等特点,但在卫星信号较弱或战时复杂电磁环境下,其位置测量的可靠性会受到严重影响。雷达测量具有全天候、全天时工作的突出优势,但其抗电磁干扰能力和隐蔽性较差。惯性测量是一种不依赖外部信息、战时可用的全自主测量方式,具有不受电磁干扰、实时、连续、短期精度高等特点,但位姿测量误差会随时间发散。
不同于以上三种测量方式,视觉测量能直接敏感高动态运动体之间的相对位姿信息,在测量精度方面具备显著优势,但对成像质量和完整性要求较高。在无人机固定机场着陆的实际使用过程中仍面临许多问题,例如: 受视觉传感器视场范围、安装位置、无人机机动方式以及飞行环境等因素的制约,导致跑道等合作目标成像不完整,存在视觉测量“盲区”,获得的相对位置与姿态存在不稳定;视觉传感器关键参数标定误差导致通过视觉测量获得的相对位置与姿态误差增加等问题[16]。其原因在于视觉相对位姿测量误差机理不明确,尚未建立完整的视觉相对位姿测量误差机理模型,从而导致测量精度难以提升。
综上所述,为满足无人机自主着陆对自主、实时、高精度相对位姿测量的需求,本文提出了无人机自主着陆视觉相对位姿测量误差分析方法。在基于点线综合特征的视觉相对位姿测量模型的基础上,推导并计算了机场跑道特征提取精度、相机内参数等对相对位姿测量精度的影响,最后通过仿真实验对相关参数的影响规律进行了验证。
1 坐标系定义
图1给出了世界坐标系(w系)、机场坐标系(a系)、摄像机坐标系(c系)以及图像坐标系(i系)的定义和相互之间关系。
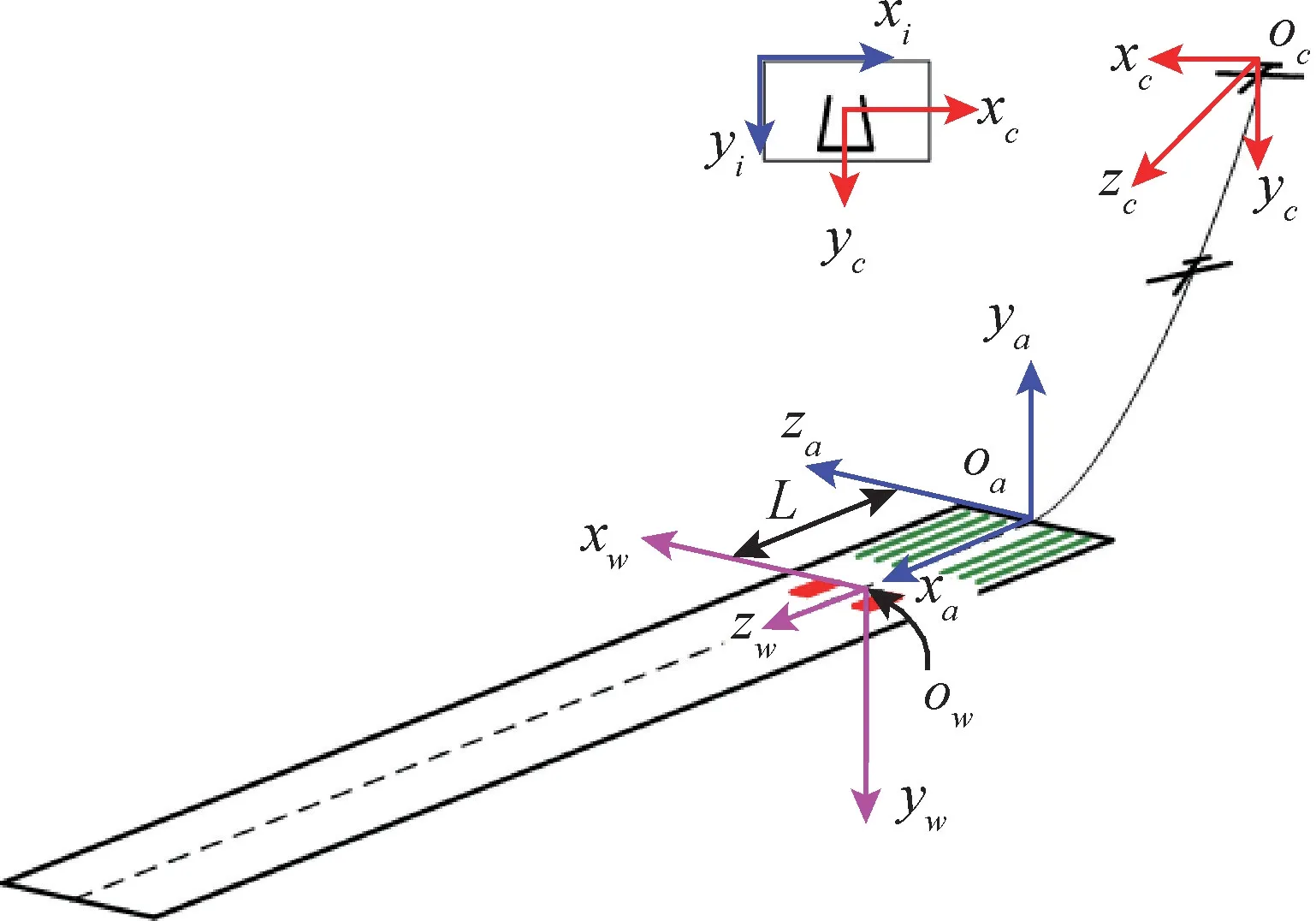
图1 坐标系示意图Fig.1 Schematic diagram of coordinate system
世界坐标系: 以跑道起始线与跑道中心线的交点为原点ow;xw轴与跑道起始线重合,右向为正;yw轴垂直于跑道平面,向下为正;zw轴沿跑道中心线,前向为正;owxwywzw构成右手坐标系;世界坐标系下某点的坐标用(xw,yw,zw) 表示。
机场坐标系: 以跑道起始线与跑道中心线的交点为原点oa;xa轴沿跑道中心线,前向为正;ya轴垂直于跑道平面,向上为正;za轴与跑道起始线重合,右向为正;oaxayaza构成右手坐标系;机场坐标系下某点的坐标用(xa,ya,za)表示。
摄像机坐标系: 以光学系统的像方主点为原点oc;当正对光学系统观察时,xc轴平行于成像平面坐标系的水平轴,左向为正;yc轴平行于成像平面坐标系的垂直轴,向下为正;zc轴指向观察者,并与xc轴和yc轴构成右手坐标系。
图像坐标系: 在摄像机光敏面所在的平面内建立图像坐标系,它是一个二维平面坐标系,以图像左上角为原点,沿图像水平方向向右为图像坐标系的xi轴,沿图像垂直方向向下为图像坐标系的yi轴,图像坐标系的单位是像素。
2 视觉相对位姿测量
2.1 基于点特征的视觉相对位姿测量
根据小孔成像原理,空间点P从世界坐标系中的齐次坐标投影到图像坐标系中的齐次坐标的过程可表示为
xi与yi分别为世界坐标系中三维点P在图像坐标系中的列像素坐标与行像素坐标,zc为P点在相机坐标系中的z坐标分量,f为相机镜头焦距,sx和sy为图像水平和垂直方向的像元尺寸,[cxcy]T为图像的主点,Ccw为从世界坐标系到相机坐标系的旋转矩阵,Twc为相机坐标系原点在世界坐标系下的坐标。
基于点特征的视觉相对位姿测量的本质是通过一组已知的“点对应” (即世界坐标系中的三维空间点坐标与图像坐标系中的像点) 求解相机的位姿,上述方法被称为Perspective-n-Point(PnP)算法
2.2 基于线特征的视觉相对位姿测量
在摄像机映射T的作用下,用Plücker 矩阵定义的直线L表示图像坐标系下对应直线的像l
式(3)可简化为
通过上述关系式可获得无人机着陆过程中世界坐标系中的跑道边线、中线、起始线与图像坐标系中的像之间的“线对应” 关系,并利用消影点、消影线以及直线之间的平行和垂直关系确定如下无人机位姿解算方程组
式(5)中,
综上所述,无人机相对位姿测量可表示为
3 视觉相对位姿测量误差分析
由上述基于点特征以及线特征的视觉相对位姿测量原理可知,测量模型的输入参数包括跑道特征点及特征线在世界坐标系中的三维坐标Pw、L,对应图像坐标系中的像素坐标Pi、l,相机内参数矩阵K包括相机镜头焦距f,垂直及水平方向的像元尺寸sx、sy,主点坐标[cxcy]T。另外,合作目标的点线配置也会影响视觉相对位姿测量的误差。本文所有推导均忽略了相机镜头的畸变影响。
3.1 相机内参数的影响
本文考虑的相机内参数主要是指镜头焦距与像元尺寸之间的比值f/sx、f/sy、主点坐标[cxcy]T,这些参数均可通过摄像机标定获取,因此相机参数的标定误差势必会影响相对位姿测量的精度,其影响规律如下
式(8)中,ki(i=1,2,3)分别表示镜头焦距与像元尺寸之间的比值f/sx、f/sy、主点坐标[cxcy]T。
3.2 特征提取像素误差的影响
由式(1)、式(2)可知,无人机固定机场着陆过程中的目标特征坐标包括跑道特征点及特征线在世界坐标系中的三维空间坐标Pw、L和对应图像坐标系中的像素坐标Pi、l。其中,Pw、L均需事先人为通过高精度测量仪器测量获取,主要涉及跑道端点的坐标、跑道长度以及跑道宽度;而图像坐标系中特征的像素坐标主要通过目标识别与特征提取算法获取,特征点提取精度用对应像素坐标的像素误差表示,而特征线的提取精度主要用直线l:yi=kxi+b的斜率k以及截距b的提取精度表示。相比较而言,特征提取像素误差是视觉相对位姿测量更为关键的误差来源,下面将分别计算其影响
式(9)、式(10)分别为由第i个特征点行坐标与列坐标像素提取误差Δxi、Δyi引起的位置和姿态误差。同理,可获得图像坐标系内第i条直线斜率和截距变化Δki、Δbi所引起的位置和姿态误差
4 精度优化实验分析
本文实验数据来源于某型号固定翼无人机着陆实飞数据,利用文献[15]中提出的基于三平行线的惯性/视觉相对位姿测量方法计算着陆时无人机相对机场跑道的侧向位置,并以此作为实验真值(惯性/视觉组合导航测量结果为真值)。跑道宽度为26.15m,所采用的视觉传感器相关参数如下
为了验证相机内参数标定误差以及跑道线特征提取误差对相对位姿测量造成的影响,本文通过在真实数据的基础上叠加部分误差,并计算此时的侧向相对位置的相对误差,以此分析不同参数对相对位置测量的影响规律以及影响权重。
4.1 抑制传感器标定误差
图2为抑制相机焦比误差以及主点坐标误差对侧向相对位置测量精度的影响。不难发现,侧向相对位置测量精度与焦比误差成线性关系,焦比标定误差越小,位置测量精度越高;而主点坐标误差分别取0.1 及0.15 倍真值时,位置测量误差随误差增加成比例增加,但主点坐标误差为0.05倍时,在整个着陆过程中位置测量误差并非完全成比例减小,三条曲线的变化规律并不完全一致。因此,通过抑制传感器标定误差能有效减小视觉相对位置测量的误差。
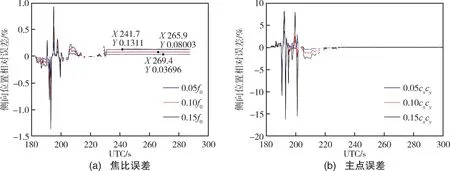
图2 相机内参数标定误差对侧向相对位置测量误差的影响Fig.2 Influence of camera parameter calibration error on lateral relative position measurement error
4.2 提高特征提取算法精度
本文采用三平行线(即跑道左右边线及中线)计算无人机相对着陆跑道的位姿信息。为了深入研究特征提取误差对相对位置测量精度的影响,本文分别分析中线、左边线、右边线在图像坐标系中斜率和截距变化对相对位置测量精度的影响。图3为中线斜率与截距的变化对侧向位置测量精度的影响。由图3可知,位置测量误差随中线斜率误差以及截距误差的增大而增大;相比中线截距的变化,其斜率的变化对侧向位置相对误差影响更大。
图4给出了左边线斜率与截距变化对侧向位置测量精度的影响。与中线相同的是,位置测量误差随左边线斜率误差以及截距误差的增大而增大;但不同之处是,左边线截距的变化对侧向位置相对误差影响更大。对比图3(a)和图4(a)可知,分别加入同比例的中线斜率误差和左边线斜率误差,中线斜率对位置相对误差影响更大,因此需要提高特征算法对跑道中线斜率的提取精度;对比图3(b)和图4(b)后发现,跑道边线相对图像中心的距离(即截距大小)对侧向相对位置测量精度至关重要,因此需要提升特征算法对跑道边界的敏感程度,提高对跑道边界位置的提取精度。通过分析图5所示的右边线斜率与截距变化对侧向位置测量精度的影响可知,右边线与左边线的影响规律一致。
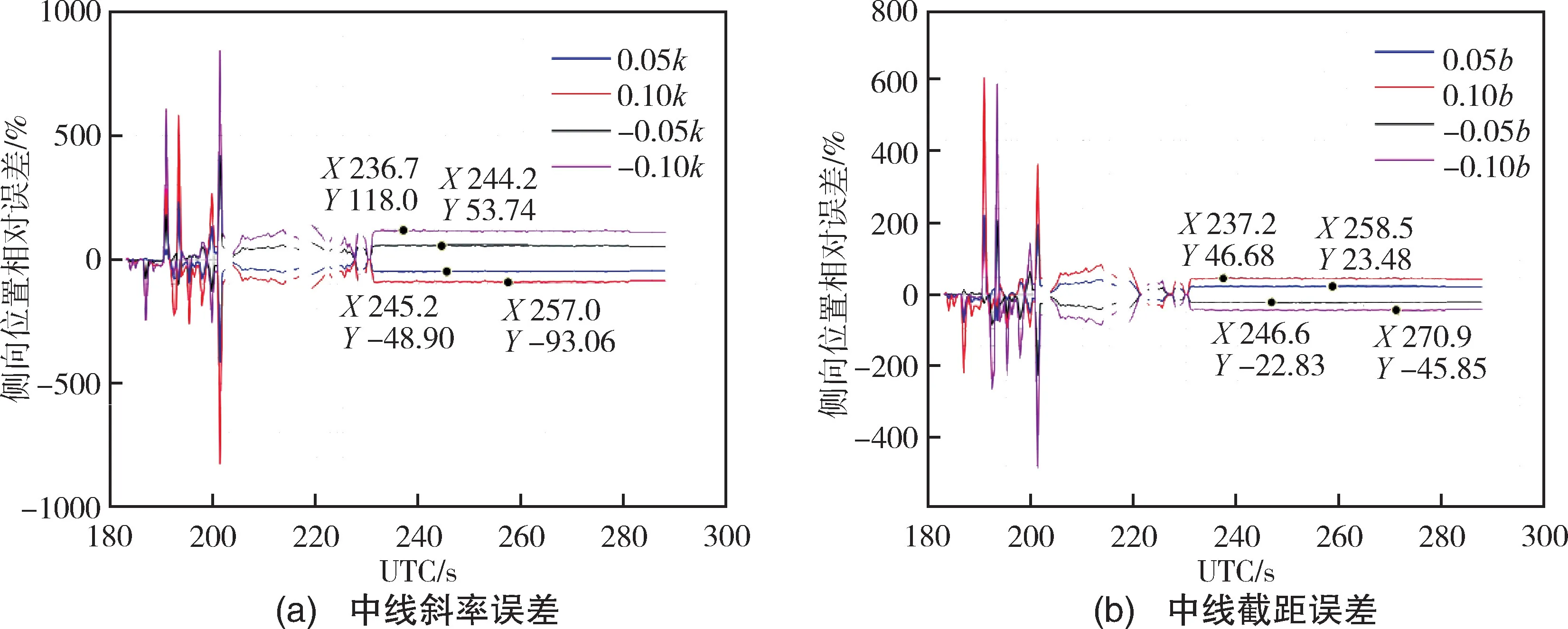
图3 像平面内中线提取误差对侧向相对位置测量误差的影响Fig.3 Influence of center line extraction error on lateral relative position measurement error in image plane
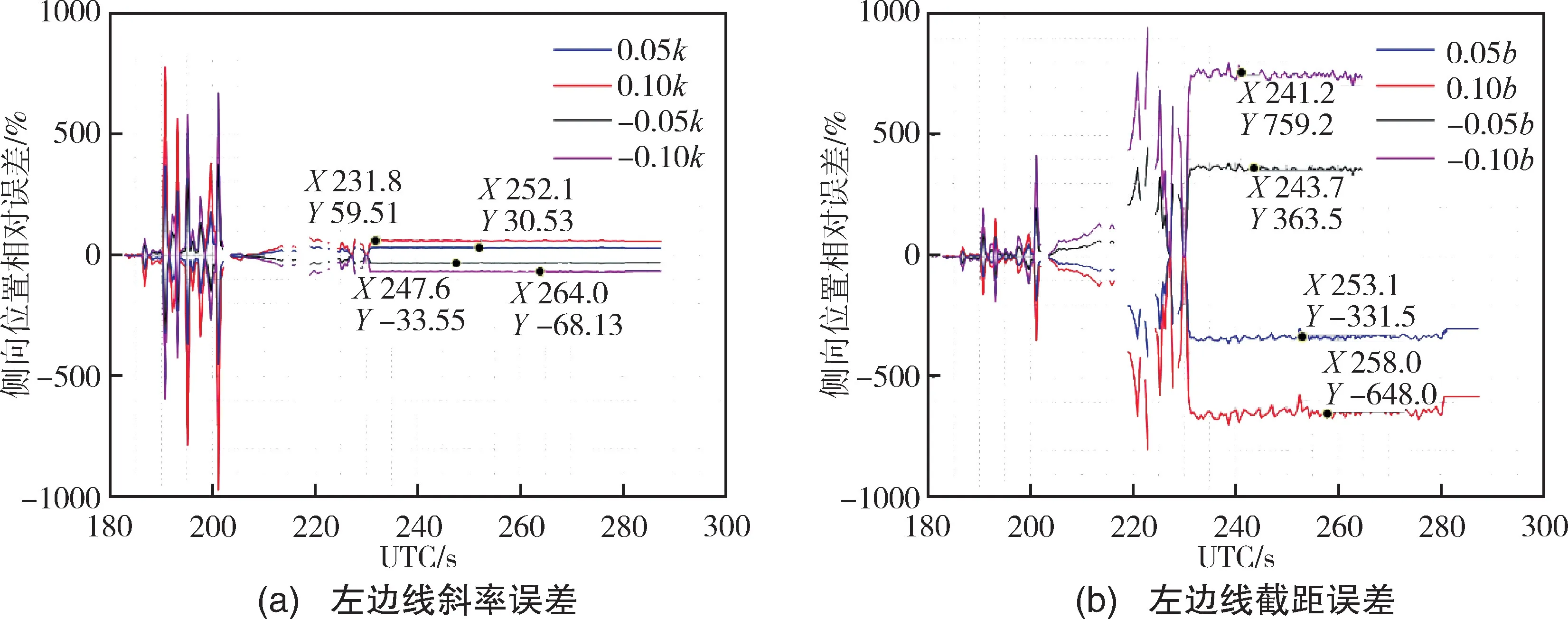
图4 像平面内左边线提取误差对侧向相对位置测量误差的影响Fig.4 Influence of left line extraction error on lateral relative position measurement error in image plane
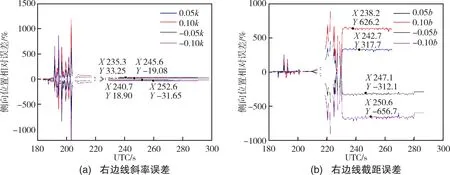
图5 像平面内右边线提取误差对侧向相对位置测量误差的影响Fig.5 Influence of right line extraction error on lateral relative position measurement error in image plane
综上所述,侧向相对位置测量精度对中线斜率与左右边线截距误差更为敏感,特征提取算法的精度是提升相对位置测量精度的核心与关键。
5 结论
本文为掌握无人机自主着陆视觉相对位姿测量误差影响因素的影响规律,提出了一种无人机自主着陆视觉相对位姿测量误差分析方法。通过模型推导和仿真验证相结合的方式确定相机内参数标定误差以及特征提取精度对视觉相对位置的影响,从仿真分析结果可知: 通过抑制相机内参数标定误差并提高特征提取精度能有效抑制相对位置测量误差;同时在基于三平行线的视觉相对位姿测量方法中,跑道中线斜率与左右边线相对中心点距离的提取精度对位置测量至关重要。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
北京航空航天大学学报(2021年4期)2021-11-24
应用数学(2020年2期)2020-06-24
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
湖北工业大学学报(2016年5期)2016-02-27
西北工业大学学报(2015年1期)2016-01-19
电测与仪表(2015年18期)2015-04-12
