
基于双目视觉的混凝土电杆立杆参数测量方法
2023-05-17 06:31:34陈朝新徐恒博陈江义
西安科技大学学报 2023年2期
陈朝新,徐恒博,郭 磊,沈 鹏,陈江义
(1.郑州大学 机械与动力工程学院,河南 郑州 450066;2.国网河南省电力公司 电力科学研究院,河南 郑州 450052)
0 引 言
混凝土电杆具有结构简单、造价低廉的优点,在城乡配网中广泛应用,是配电网中的重要组成部分。恶劣天气时,电杆抗倾覆能力不足会导致大规模倾倒事故,影响居民生产生活甚至威胁居民的生命安全,而埋深与倾斜率是影响电杆抗倾覆能力最重要的2个立杆参数[1-2],掌握其埋深与倾斜率数据,及时对抗倾覆能力不足的电杆进行加固是预防事故的关键,因此建立高效智能的混凝土电杆埋深与倾斜率测量方法对配电网安全稳定运行具有重要意义。
混凝土电杆埋深测量方法一般采用探地雷达、全站仪与便携式激光测距仪[4],而倾斜率测量一般采用铅锤法,经纬仪法,这些方法速度慢、自动化水平低。近年来激光雷达技术也开始用于杆塔结构的测量[5-6],可较精确的获取结构外形尺寸,但该方式计算量大,成本高,且易受障碍物影响。当前基于双目视觉的测量成为了研究的热点,该方法是一种非接触的三维测量方法,与上述方法相比,该方式硬件技术成熟,成本低,部署方便[7-8]。陈广华等利用深度学习方法在图像中对电力塔进行定位,再用双目立体视觉计算得到了电力塔的倾斜度[9];MA等采用YOLO技术与双目测距相结合实时获取了危险物体与输电线路的距离[10];HUANG等采用基于最小二乘拟合插值改进的SGM算法细化了视差图,在5 m内对高压线缆上障碍物进行测量,且误差小于5%[11];LI等通过对深度图的处理,确定绝缘子所在区域,利用无人机对绝缘子进行检测测量,平均误差为2.5%[12];李昊等通过对采用Canny边缘检测后的左右图像进行匹配,精确了特征点匹配精度,测量的输电杆塔间距误差小于2.5%[13]。目前有关双目视觉在电网中的应用研究主要集中在高压输电线路,尚缺乏采用视觉技术在配电网混凝土电杆立杆参数测量方面上的研究。
为了同时满足配电网混凝土电杆埋深与倾斜率测量的准确性与自动化要求,文中研究了一种基于双目视觉的测量方法。首先改进Deeplab V3+模型,在全景图像中对混凝土电杆进行区域分割,减少背景区域对特征点提取的影响;然后采用基于局部区域效应的亚像素边缘检测方法确定电杆的轮廓,并采用最小二乘法拟合边缘,在较高噪声的图像区域提取精确特征点,最后计算出混凝土电杆的埋深与倾斜率。
1 混凝土电杆立杆参数测量方法
1.1 混凝土电杆立杆模型
混凝土电杆的埋深为其地下部分的长度,如图1所示。采用间接测量的方式,通过测量电杆地上部分侧边的底点X1(x1,y1,z1)与顶点X2(x2,y2,z2)三维空间位置可得,计算见式(1)~式(3)。
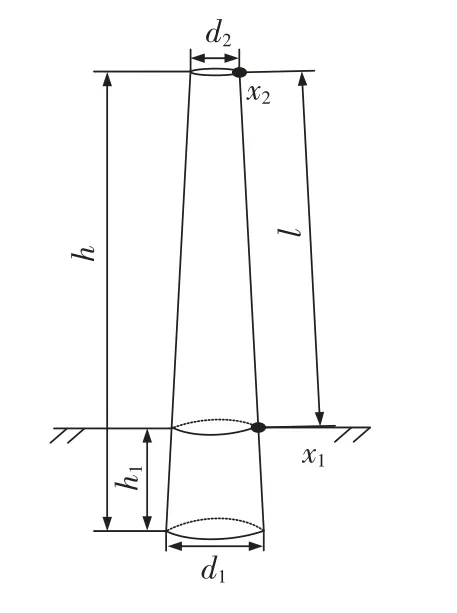
图1 混凝土电杆安装结构示意Fig.1 Sketch of concrete pole installation structure
式中 θ为电杆锥度角,(°);d1为根径长度,m;d2为梢径长度,m;l为电杆的地上部分沿电杆锥度上的长度,m;h1为电杆埋深,m;h为电杆全长,m,在已知电杆型号的情况下;d1,d2和h为已知参数。
电杆倾斜率α可利用混凝土电杆侧边方向向量与水平面夹角测量获得,计算见式(4)。
式中 a为水平向量;b为点X1到点X2方向向量。综上可知,在不考虑混凝土电杆发生弯曲变形的情况下,通过得知电杆侧边的顶点和底点的空间三维坐标即可获得埋深与倾斜率。
1.2 方法流程
测量方法的基本流程如图2所示,在使用双目相机前,先标定相机内部与外部参数,根据其对输入的左右相机图片进行畸变与立体校正,获取电杆图像。采用改进Deeplab V3+网络结构对图像进行区域分割,对分割区域的图像预处理后,进行亚像素级边缘提取,利用电杆的几何形状特性对提取边缘进行拟合,得到所需特征点后,计算混凝土电杆埋深与倾斜率。
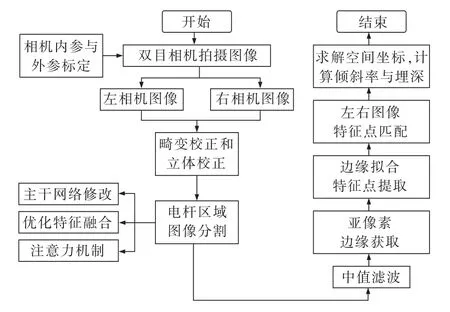
图2 混凝土电杆测量方法技术路线Fig.2 Technical route of concrete pole measurement method
2 混凝土电杆区域分割算法
相比基于锚框的目标检测算法,语义分割模型可基于像素级别精度在图像中定位目标位置,更加精确。Deeplab V3+网络结构是图像分割领域的新高峰[14],引入的编解码模块和Xception主干网络使其分割精度相比Deeplab V3+进一步提升[15]。为减少模型的训练与预测时间,方便模型在移动端部署,需要减小模型复杂程度,进一步提高其分割定位精度,对混凝土电杆分割边缘更为细化,故修改原模型主干特征提取网络,优化模型的特征融合并加入改进CBAM注意力机制,改进后模型结构如图3所示。

图3 改进Deeplab V3+结构Fig.3 Improved Deeplab V3+structure
2.1 修改主干特征提取网络
选择MobileNetV2作为主干特征提取网络,MobileNetV2版本保留V1版本的深度可分离卷积,增加线性瓶颈和倒残差[16],利用线型瓶颈结构实现对图像进行高和宽的压缩。MobileNetV2的倒残差结构参考ResNet,先经过1×1的逐点卷积操作将特征图的通道进行扩张,丰富特征数量,进而提高精度,这一过程和残差块的顺序颠倒,其过程为:1×1(升维)→3×3(dw conv+relu)→1×1(降维+线性变换)。
2.2 优化特征融合
Deeplab V3+在解码模块借鉴FCN的跳步连接方式,选取主干网络提取到的1/4大小的浅层特征图与经过ASPP得到的1/16的深层特征图进行拼接,其浅层特征图主要包含为预测生成清晰边界的细节信息,深层特征图主要包含有助于图像区域分类识别的抽象语义信息[17],但由于特征提取过程中对图像进行多次下采样,导致初始全局信息丢失,分割边界较为模糊。为平衡模型复杂度与预测精度,选择再加入多层下采样后的1/8大小的浅层特征图,将其进行2倍上采样与1/4大小的浅层特征图并进行通道堆叠,利用1×1卷积进行通道融合,与进行4倍上采样后的深层特征图拼接后进行卷积得到最终预测结果。
2.3 改进CBAM 注意力机制
由于不同深度网络中承载的信息各不相同,各通道承载的信息量也有不同,直接将浅层特征层与深层特征成进行拼接融合会导致模型偏离最优解,影响模型预测精度。因此在优化特征融合后引入通道注意力机制与空间注意力机制,抑制冗余通道信息和无效空间特征信息,突出对有效特征的提取,提升模型学习能力和泛化能力。
CBAM的通道注意力模块分别利用最大池化和平均池化得到不同通道特征[18-19],但利用的共享连接方式会引入多余通道关系,增加计算量,降低预测精度。文中故借鉴ECA注意力机制[20],改进其通道注意力模块,分别对平均池化与最大池化后的通道特征进行1 d卷积,提取特征通道间关系并进行相加,最后利用Sigmoid将通道权重固定在0和1之间,如图4所示。

图4 改进CBAM的通道注意力模块Fig.4 Channel attention module of improved CBAM
图4中k为通道信息交互的最佳范围,即1 d卷积的卷积核大小,计算见式(5)。
式中 C为特征通道的数量;γ和b一般被设为2和1。
改进CBAM的通道注意力计算见式(6)。
式中 Mc(F)为改进的通道注意力;F为输入特征;C1D为一维卷积;W1,W2分别为全局最大池化与平均池化后特征提取权重;σ为Sigmoid函数。
原CBAM空间注意力Ms(F)结构不变,则改进CBAM注意力输出特征的计算见式(7)。
3 混凝土电杆特征点提取
3.1 图像预处理
根据混凝土电杆区域分割结果对原图做包围矩形,为防止分割不够精确带来的边缘信息丢失,矩形区域长宽略微大于最小包围矩形,后续特征提取操作仅对矩形框内部图像进行处理,如图5所示。

图5 特征区域提取Fig.5 Feature area extraction
户外拍摄图像的边缘区域噪声较多,颗粒化严重,直接进行边缘提取误差较大,故在进行边缘检测取前,采用3×3中值滤波对图像进行平滑处理,减少噪声干扰,抑制颗粒化现象,如图6所示为图5(c)矩形框内左下角位置,可以看出中值滤波较好抑制电杆边缘的颗粒化现象。

图6 中值滤波前后区域图像对比Fig.6 Comparison of regional images before and after median filtering
3.2 亚像素边缘提取
传统边缘检测方法,如Sobel,Canny和Prewitt算法只能提取到像素级边缘,双线型插值亚像素边缘提取方法易受噪声影响,在户外高噪声情况下效果很差,而Zernike矩和Franklin矩方法计算复杂度很高,不易部署[21],故采用局部区域效应的亚像素边缘检测方法对混凝土电杆进行边缘检测[22],采用边缘像素强度值不连续的假设,即边缘穿过像素(i,j),该点像素强度的计算见式(8)。
式中 A,B为像素点边缘两侧的强度;Gi,j为像素(i,j)内边缘线下方区域面积,h′为像素边长度。
假设边缘分割曲线为二次函数,表达式为y=px2+qx+r;p,q,r为二次曲线的系数,如图7所示,将蓝色框视为求解所需最小子区,依据式(8)假设根据窗口内的强度特征与面积效应,求解p,q,r,假设原边缘像素点坐标为(i,j),则细化后亚像素边缘坐标为(i,j+r)。

图7 边缘线求解过程Fig.7 Edge line solution process
利用该边缘求解方法对预处理后图片进行边缘检测,得到混凝土电杆亚像素级边缘,如图8所示,蓝色箭头为边缘点周围像素强度梯度方向。
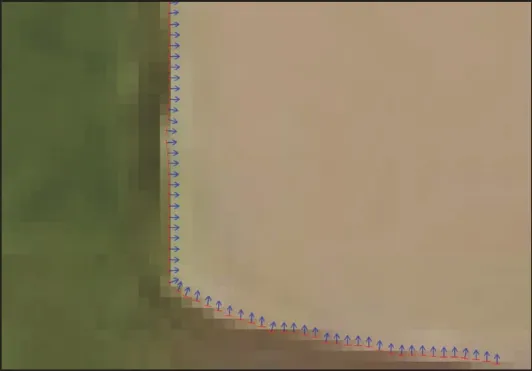
图8 混凝土电杆的亚像素边缘Fig.8 Subpixel edge of concrete electric poles
3.3 特征点提取
从图1可知,混凝土电杆左右边缘为直线,上下边缘为椭圆曲线,故利用混凝土电杆几何特性,对提取到的亚像素边缘坐标分别进行直线与曲线拟合,其交点则为所需混凝土电杆特征点,为防止噪音点对拟合边缘产生误差,采用RANSAC算法先对偏移值较大的伪边缘点进行剔除,设直线与椭圆曲线在图像坐标系下的方程通式分别为y=A1x+B1,x2+A2xy+B2y+C2x+D2y+E2=0,根据最小残差平方和求解方程中系数,目标函数L1,L2的计算见式(9)。
式中 N,M分别为直线与椭圆曲线亚像素边缘点数量。求解拟合直线与椭圆曲线,如图9所示,文中提取的特征点与亚像素边缘轮廓有较好契合度。
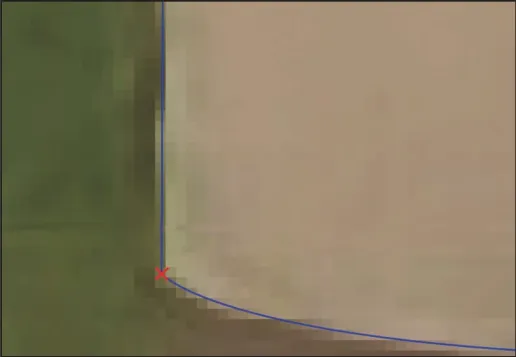
图9 混凝土电杆特征点Fig.9 Feature points of concrete electric poles
4 立杆参数测量与分析
将拍摄的500张混凝土电杆图片进行数据增广作为数据集,利用Labelme软件进行语义分割标签的制作,数据集、验证集和测试集按8∶1∶1划分。
将模型训练分为两个部分,先将主干网络冻结训练50个Epoch,再解冻训练50个Epoch,以加快模型的训练速度,冻结部分批量大小为8,解冻部分批量大小为4,网络训练选择小批量梯度下降算法,动量为0.9,初始学习率为7×10-3,采用余弦退火降低学习率。
采用平均交并比(mIoU)作为衡量模型分割精度的指标,其计算见式(10)。
式中 m为类别数量,只有电杆与背景两个标签,故m =2,TP为正确识别的混凝土电杆像素数,FN为未检出的混凝土电杆像素数,FP为误检为混凝土电杆的像素数。
对改进Deeplab V3+网络结构进行对比试验,验证文中提出的三种改进方法对分割模型性能的影响,为验证改进CBAM的作用,在相同位置加入ECA和CBAM注意力机制进行对比,利用参数大小评估模型的复杂度,结果见表1,改进模型前后预测结果对比如图10所示。

图10 改进模型前后分割结果对比Fig.10 Comparison of segmentation results before and after the improved model
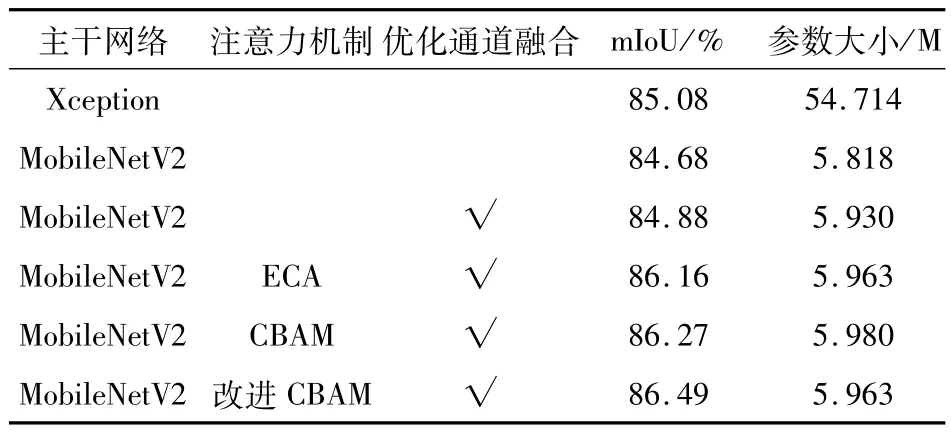
表1 混凝土电杆区域分割模型性能对比Table 1 Performance comparison of concrete pole area segmentation models
分析可知,MobileNetV2主干网络可大大减小模型的参数大小,但会略微降低预测准确率,优化特征融合使mIOU提升0.2%,加入改进后的CBAM注意力机制预测精度再次提升1.61%,比ECA和原CBAM注意力机制效果更好,且改进的CBAM注意力机制相比原结构参数增加量更小。
选用AYALEY可调基线双目相机,其最大分辨率为1 280×960,测量试验平台如图11所示,采用张正友标定法对相机进行标定,使用标定板的棋盘格为15 mm×15 mm,角点数为12×9,利用Matlab中相机标定工具箱计算相机内外参数。

图11 测量试验平台Fig.11 Measurement experimental platform
进行测量时将双目相机水平放置,利用水平仪保证相机光轴方向与重力方向垂直,根据电杆实际情况与相机成像角设定拍摄距离,在测量时保证电杆可以完整地显示在左右相机中,左右相机同时拍摄混凝土电杆图像并输入计算机进行处理。对混凝土电杆进行实地测量试验,采用文中方法与全站仪分别对8根混凝土电杆的埋深与倾斜率进行计算测量,结果见表2,检测耗时为图像输入到计算机进行处理计算得到结果所用的时间。
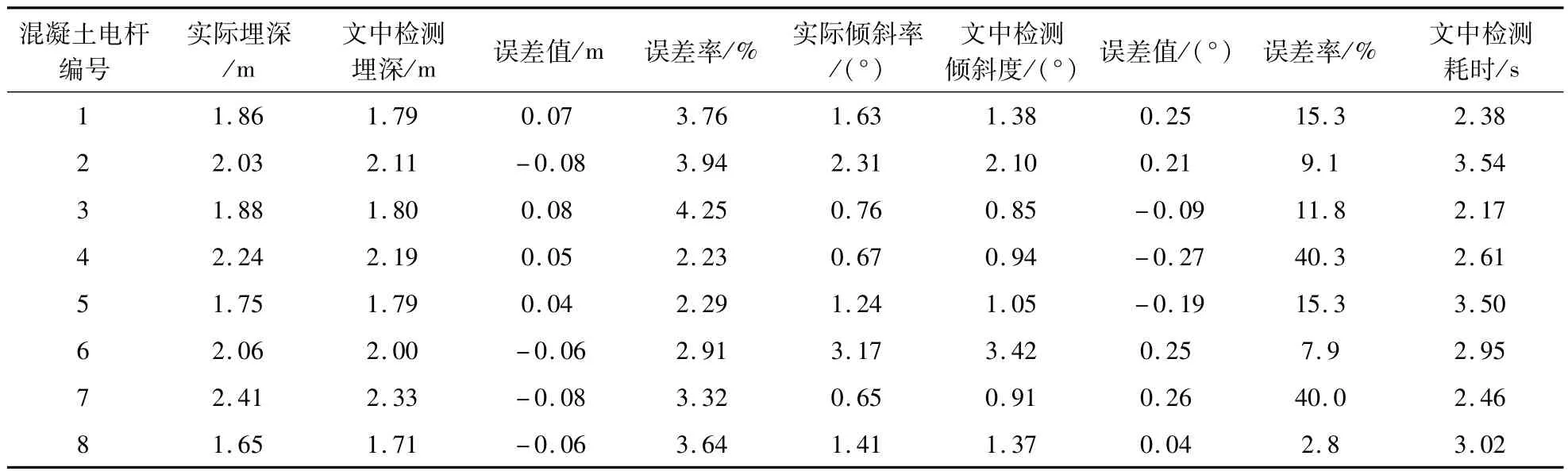
表2 图像测量结果及误差Table 2 Image measurement results and errors
经对比,文中方法的埋深测量误差率小于5%,误差值小于10 cm,倾斜率误差值不大于0.3°,且检测耗时小于4 s,运行速度较快。结果表明,所提方法的检测速度与精度基本满足对混凝土电杆立杆参数的测量要求。文中的测量误差可能主要来源于以下2方面:①标定过程中存在误差,并被引入到图像校正过程中;②双目相机调平过程引入了一定的倾斜。
5 结 论
1)针对混凝土电杆立杆参数测量效率低的问题,提出基于双目立体视觉的电杆埋深和倾斜率测量方法,实测结果表明该方法能满足测量要求,且易于部署,成本低。
2)在混凝土电杆区域分割算法中,改进原Deeplab V3+网络结构,修改主干特征提取网络,优化特征融合,并且加入改进的CBAM注意力机制,结果证明改进的Deeplab V3+模型相比于原模型的mIoU提升1.41%,参数大小减小89.1%。加入改进CBAM 注意力机制的模型相比加入原CBAM的模型,mIoU提升0.22%,且参数增加量更少。
3)利用双目视觉原理,根据混凝土电杆的几何特性,采用基于区域效应的亚像素边缘拟合方法获取特征点,具有较高的测量精度,为简单几何物体的非接触测量提供参考。
猜你喜欢
电子世界(2021年15期)2021-09-27 08:57:18
光源与照明(2021年5期)2021-03-27 03:21:49
油气田地面工程(2020年6期)2020-06-12 06:19:56
电子制作(2019年20期)2019-12-04 03:51:38
通信产业报(2016年44期)2017-03-13 08:41:45
现代计算机(2016年11期)2016-02-28 18:35:20
机械与电子(2014年2期)2014-02-28 02:07:46
河南科技(2014年22期)2014-02-27 14:18:26
空间控制技术与应用(2010年3期)2010-12-23 08:04:58
雕塑(1999年2期)1999-06-28 05:01:42
