基于方向直方图签名描述符的点云配准方法
2023-05-08 03:56赵卫东陈香梅
安徽工业大学学报(自然科学版) 2023年2期
赵卫东 ,程 星 ,陈香梅
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243032)
近年,机器视觉在机器人领域得到迅速发展,且广泛用于工业抓取、焊接及装配等作业中[1]。错误的目标位姿会导致机器人抓取、焊接等作业出现明显偏差、缩短机器人使用寿命,严重影响工业生产效率。因此,对物体识别定位的研究具有重大的工程意义。物体识别定位是从计算、比较或学习物体的几何属性、形状属性和结构属性等特征出发[2],常见的物体识别定位方法大致分为基于2D 图像特征和三维点云特征的物体识别法,两者均利用物体在不同维度上的相同特征来完成对物体的识别定位。特征匹配作为机器视觉领域的核心问题之一,本质是通过物体的特征将不同场景下的物体建立联系,从而将各场景下物体位姿进行仿射变换[3]。物体的特征可通过2D 图像的亮度、姿态、形状等属性表示,利用2D 特征对特定物体进行识别定位[4]。郑晶怡等[5]提出一种图割法与形状先验模型相结合的工件识别定位方法,通过先验模型将目标工件分割出来,对采集的工件拟合出平面,计算拟合工件表面法向量,从而对目标工件进行识别定位;程义民等[6]在对物体深度图像分割的基础上,计算深度图像高斯曲率、平均曲率等几何信息,再利用属性关系图(attributed relational graph,ARG)描述物体,最后通过模型库ARG 图匹配来完成物体的识别定位。基于图像的物体识别方法能够快速识别定位物体,但受拍摄图像质量、光照、2D 特征不显著等问题的影响,无法准确、高效地识别定位物体。
基于三维点云特征的物体识别作为物体识别定位领域研究热点之一,具有较好描述物体细节特征的能力,从三维角度比对物体特征,可将特征分为局部特征和全局特征。基于点云全局特征的方法如视点特征直方图[7]、聚类视点特征直方图[8]等,对点云完整性要求较高,对遮挡、噪声等问题处理效果不佳,无法用于复杂环境。基于点云局部特征的方法,通过对点云局部特征计算编码来识别整体,一定程度上解决了点云遮挡、残缺和噪声等问题。Rusu 等[9]提出快速点特征直方图(fast point feature histogram,FPFH),根据特征点与其邻域半径内的点估计法线方向角度差异,建立一个多维直方图,通过比对、匹配直方图完成点云识别。谭国威等[10]利用FPFH 描述子对点云进行粗配准后,使用迭代最近点(iterative closest point,ICP)进行精确配准,为点云配准提供一种“粗细结合”的配准方式;陆军等[11]在点云配准中加入关键点计算,优化点云配准速度;宗晓萍等[12]在粗配准过程加入KD 树数据结构,加快对应点对搜索,进一步优化整体配准速度;Tombari等[13]提出方向直方图签名(signature of histograms of orientations,SHOT),将特征点附近空间划分为32 个子空间,计算统计每个子空间法线特征直方图,再将每个子空间直方图综合到一起得到高维描述符,该描述符鲁棒性较好。基于局部特征的点云识别对遮挡、残缺等情况有较好的识别效果,但依然存在识别速度慢、精度低、鲁棒性差等问题[14-16]。鉴于此,针对复杂场景下传统点云识别效率低、精度低、鲁棒性差等问题,提出一种基于SHOT 描述符的点云配准方法,在目标存在遮挡、残缺和其他干扰物的情况下,利用高维SHOT 描述符记录物体局部特征,对目标进行快速识别定位,为机器人提供精确的点云变换矩阵,具有较好的配准效率和鲁棒性。
1 基于点云局部特征的识别
针对传统点云识别存在的问题,对采集的点云进行降采样和内部形状签名[17](intrinsic shape signatures,ISS)提取关键点预处理,采用KD 树搜索匹配特征相似点对,缩短配准用时;对提取的关键点采用鲁棒性较好的SHOT 描述子计算、保存点云特征;采用随机采样一致性[18-19](random sample consensus,RANSAC)优化配对点对和估计初始位姿,为迭代最近点[20](ICP)配准提供初始条件,提高配准精度。
1.1 点云降采样
点云数据量庞大,需进行降采样预处理,但不能破坏点云的局部特征。文中采用体素重心降采样,即通过建立空间体素栅格,将点云划分数个栅格区域,将栅格包含的所有点用质心代替,此时质心称为降采样点Q,如式(1)。
式中:n为点云个数;(qxi,qyi,qzi)为 空间坐标系下第i个点沿x,y,z轴的坐标值。
1.2 ISS 特征点提取
特征点是能够充分展现点云特征的点集,数量远小于原始点数。ISS 提取特征点的步骤如下:

1.3 关键点SHOT 描述符
提取特征点后,对特征点建立空间SHOT 描述符。SHOT 描述符作为一种局部特征子,在特征点F处建立局部坐标系,对半径为r的球邻域内经线、纬线和径向方向分别划分8,2,2 个部分,共形成32 个区域,如图1。统计区域内每个点的法向特征编码至直方图,将32 个区域的直方图综合到一起得到高维描述子。

图1 SHOT 描述符分割示意图Fig.1 Schematic diagram of SHOT descriptor splitting
计算SHOT 描述符的步骤如下:
1) 对ISS 提取的关键点pi构建协方差矩阵M,其中p表示关键点pi邻域内的其他点,p*表示邻域内所有点的质心,d表示邻域内的点到质心p*的距离。■
2) 对协方差矩阵M求解得出特征值,可得λ1>λ2>λ3,对应特征向量v1,v2,v3代表x,y,z坐标轴。
3) 计算分布在32 个区域内第k区域某关键点pi与其邻域点p的 夹角余弦 cos θki,如式(6)。其中vki表示第k个区域内第i个点的法向量,v3表 示关键点pi的法向量。
4) 统计各个区域内夹角余弦,共分为11 维直方图,再将32 个空间直方图组合,最终得到 3 2×11=352维度的SHOT 描述符。
1.4 KD 树对应点对匹配
KD 树是一种分割K维数据空间的数据结构,将无序的K维数据按一定顺序排列,以方便快捷高效地检索,大幅减少搜索时间。KD 树多用于处理多维数据,KD 树中每一个节点代表一个空间范围,构建KD 树的过程是一个逐级展开递归的过程。构建KD 树后,对于特定点pi,对给定距离r找出满足式(7)的所有点pr。
不同点云的相同位置SHOT 描述符应近似相同,在对模型点云和场景点云提取特征后,需将相同特征的点联系起来。对提取到点的SHOT 描述符进行二进制编码,得到每个特征点的特征向量Di,构建KD 树检索匹配相似特征向量的点对。匹配结果如图2,圆圈代表特征点,实线代表正确配对,虚线代表错误配对。
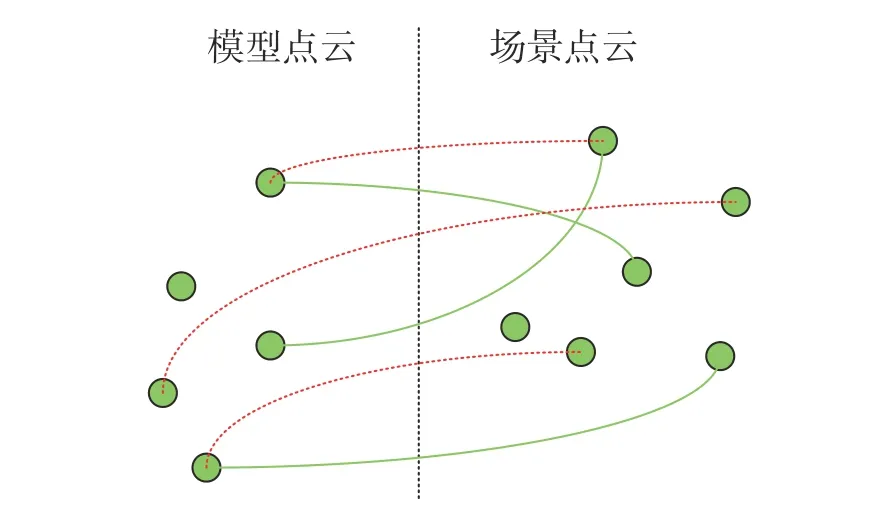
图2 模型点云和场景点云配对关系Fig.2 Matching relationship between model point cloud and field point cloud
1.5 RANSAC 粗配准
由于点云的稀疏程度、噪声等影响,匹配完成的点对会存在误匹配,直接影响粗配准结果。文中采用RANSAC 在估计初始位姿的同时,剔除误匹配点对,提高配准成功率。RANSAC 步骤如下:
1) 从配对点集P中随机选取3 组对应点对,并拟合出模型A1;
2) 对P中剩余配对点对,计算每个点与拟合模型A1的欧式距离,若距离超过提前设定阈值认为是局外点,不超过阈值则认为是局内点,记录此时局内点数量m;
3) 重复上述步骤直到迭代上限,统计不同刚体变换下样本内点个数,选取样本内点个数最多的模型为最佳数学模型,并保留所有样本内点,剔除在此刚体变换下的样本外点。
对于最佳模型给出的配对点集,利用奇异值分解[20](singular value decomposition,SVD)计算粗配准点云变换矩阵,为后续ICP 配准提供良好的初始配准条件。
1.6 ICP 精配准
ICP 配准需良好的初始配准结果,否则会陷入局部最优解,难以完成理想配准。RANSAC 算法提供了较好的初始位姿,将目标点云经过旋转平移变换,降低由空间差异造成的两片点云之间的旋转平移错位,有助于提高精配准的速度和精度,不会陷入局部最优解。采用ICP 配准的主要步骤如下:
1) 设模型点云Cp={pi,i=1,2,3,···,u} ,场景点云Cq={qi,i=1,2,3,···,t},u和t表示两点云数量。
2) 在模型点云Cp中 随机选取3 个即以上的点集Cp1, 从场景点云Cq中选择预期最近的点集Ct1,确定其对应关系,并计算对应的旋转矩阵R和平移矩阵T。
3) 计算变换后的模型点云和场景点云的均方差函数e,计算公式如下
4) 当均方误差小于初始设定值e0时,终止迭代,选择当前R和T为最终旋转平移变换矩阵。若不满足条件,重复步骤2),3),4),直到满足条件要求。其中N表示随机选取点个数。
2 实验与结果分析
2.1 实验过程
通过自主搭建的双目点云扫描设备获取点云,该双目设备主要由2 个Basler 相机型号为acA1920-150 µm相机、步进电机、线激光发射器和驱动电路构成。实验装置及实验平台如图3。

图3 扫描设备及实验平台Fig.3 Scanning equipment and experimental platform
通过双目点云扫描设备获取热电偶工件模型点云,对其处理得到红色模型点云(图4(b)),点云数量为35 215;为加快配准速度,对模型点云进行体素重心降采样(图4(c)),降采样后点云个数为3 000;对降采样后的点云采用ISS 提取特征点,设置搜索半径为60 mm、阈值为0.03,最终提取特征点个数为132 个,特征点用绿点表示(图4(d))。模型点云预处理过程如图4。

图4 模型点云的预处理Fig.4 Preprocessing of model point clouds
计算特征点SHOT 描述符,并进行二进制编码后存放在本地模板库中,为后续场景点云配准做准备。对包含热电偶目标场景进行扫描,获取的场景点云同样进行体素重心降采样预处理,限制场景点云个数在5 000 个以下,并计算其特征点。取特征点周围10 个点计算法线,领域搜索半径为60 mm,计算SHOT 描述符。对提取到的SHOT 描述符构建KD 树,与本地模板库中的模型对比,设置阈值为0.25,完成与模型点云的点对匹配;设置RANSAC 最大迭代次数为500、阈值为0.5,通过RANSAC 去除误匹配点对并获取粗配准位姿;将粗配准获取的初始位姿作为输入,设置ICP 最大迭代次数为200、转化差值为1e-6,结合粗配准位姿完成最终精配准。
为方便直观观察点云配准效果,将整个过程用可视化结果表示,如图5。图5(a)为KD 树配对后的点对关系,包含较多的误匹配点对;图5(b)为经RANSAC 去除误匹配点对,矫正后的配对关系;图5(c)为经RANSAC 粗配准后的初始位姿;图5(d)为最终ICP 配准后位姿。

图5 本文方法配准的可视化流程Fig.5 Visualization process of this method registration
对于图5(d)中的配准结果,最终模型点云相对于场景目标点云的位姿转换关系T如下:
2.2 实验结果分析
为验证本文方法的有效性,按照上述配准流程,分别对热电偶和H 型钢进行点云配准,并与传统ICP 算法作比较,配准效果如图6,7。从图6,7 可看出:直接使用ICP 配准会陷入局部最优解,导致配准失败;本文方法能够较好地完成配准,不会陷入局部最优解。为衡量配准精度,取两片点云空间距离接近程度SRMSE,定义为
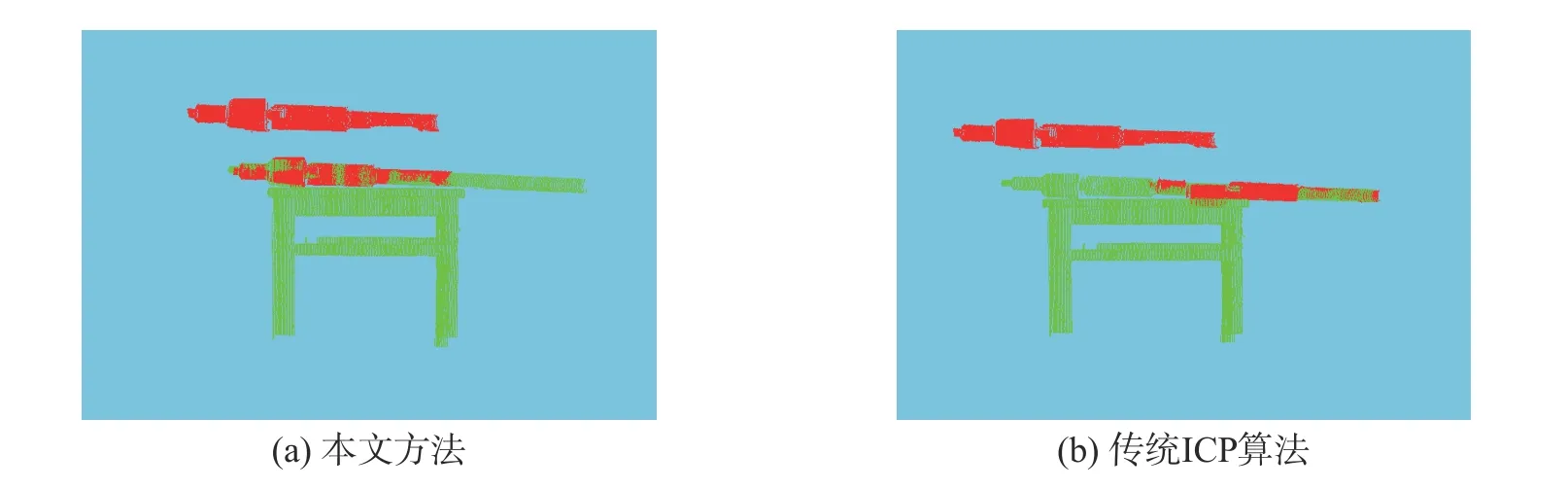
图6 本文及传统方法热电偶配准效果比较Fig.6 Comparison of thermocouple alignment effect between this paper and traditional method

其中:N为对应点数量;Xi为 配准后对应点之间的欧式距离;X︿i为对应点之间欧氏距离的真值。

图7 本文及传统方法H 型钢配准效果比较Fig.7 Comparison of H-beam alignment effect between this paper and traditional methods
对工件热电偶和H 型钢按照本文方法配准,配准评估结果如表1。由表1 可看出:传统的ICP 配准都会使两片点云产生明显的错配,RMES 达到厘米级,H 型钢的配准误差更大,而本文方法误差在毫米级、精度较好;本文方法配准用时较短,在2 s 以内。这是因为本文方法在ICP 精配准前通过粗配准为ICP 配准提供了良好的初始条件,避免配准陷入局部最优发生错配现象。

表1 不同方法的配准效果评估Tab.1 Evaluation of alignment effect of different methods
对热电偶及H 型钢采用本文方法进行50 次扫描配准,结果如图8。由图8 可看出:配准平均误差较稳定,由于热电偶表面凹凸变化明显,相对于H 型钢其特征更明显,热电偶的配准精度比H 型钢好。

图8 平均配准精度与配准次数的关系Fig.8 Relationship between average alignment accuracy and alignment number
为验证本文方法具有较好的鲁棒性,根据上文实验结果,采用本文方法对选择特征不明显的H 型钢在遮挡和众多干扰物干扰情况下进行识别实验,结果如图9,10。由图9,10 可看出:对于无明显特征的H 型钢,在其他干扰平面和遮挡物存在的情况下,本文方法依然能够对其进行准确识别,具有较好的鲁棒性。

图9 本文方法对干扰物的识别情况Fig.9 Identification of interferers by this method

图10 本文方法对遮挡物的识别情况Fig.10 Recognition of obstacles by this method
3 结 论
为实现复杂场景下机器人能够高效、准确地识别和定位目标工件,提出一种基于SHOT 描述符的点云配准方法。通过双目点云扫描设备获取目标工件点云,对其进行预处理,并计算SHOT 描述符且将其存储在本地;对场景点云计算SHOT 描述符并进行二进制编码,构建KD 树加速与本地模板库的匹配,提高配准速度;对配对完成的点对,使用RANSAC 去除误匹配点对后,利用SVD 估计点云初始配准位姿,提高配准准确率;使用ICP 优化配准结果,再次提高配准精度。实验结果表明:本文方法能够快速准确的识别目标工件,配准精度在5 mm 以内、配准时间在2 s 以内;相比于传统点云配准ICP,本文方法配准精度更高,鲁棒性更好;对目标特征不明显的工件在目标遮挡、残缺和其他干扰物的情况下,本文方法依然有较好的识别效果,鲁棒性较好,能够满足复杂环境机器人场景的应用。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
测绘学报(2022年12期)2022-02-13
计算机应用与软件(2020年6期)2020-06-16
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
摄影之友(影像视觉)(2018年12期)2019-01-28
数字通信世界(2018年1期)2018-04-18
测绘科学与工程(2017年5期)2017-05-07
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04