
直升机高海况起降相关装备能力要素分析
2023-05-08 07:40:30贺少华谭大力
海军航空大学学报 2023年2期
贺少华,袁 泉,谭大力,腾 腾
(1.海军研究院,北京 100161;2.中国船舶集团有限公司第七一三研究所,河南郑州 450015)
直升机能够在舰船上正常起降是其前出执行空中任务的前提。起降能够适应的海况越高,可执行任务的时间窗口就越多;反之,如果起降适应海况能力偏低,则将直接制约任务能力发挥。
直升机高海况起降作业需要舰、机、人、环动态配合,它是1 个典型的复杂系统问题,影响因素众多,其中的主要影响因素来自装备、试验、训练等多个方面。本文主要对装备相关影响因素进行分析,旨在为国内相关装备研制和部队训练提供参考。在所有船舶类型中,直升机在非直通甲板舰船(如常规驱护舰)上起降时的舰机动态配合行为最为复杂[1],因此,本文主要针对直升机与非直通甲板舰船进行分析。
1“高海况”的定义及高海况起降需求
海况,是指在海上风力作用下,由风浪和涌浪引起的海面外貌特征。目前,国际上通常根据视野内海面状况、波峰的形状及其破裂程度和浪花泡沫出现的多少等,将海况分为10级。分级标准如表1所示。表1 中的浪高(波高)为统计值(即1/3 有义值,其表示一段时间内测量得到的浪高中的前1/3大值的平均值)。
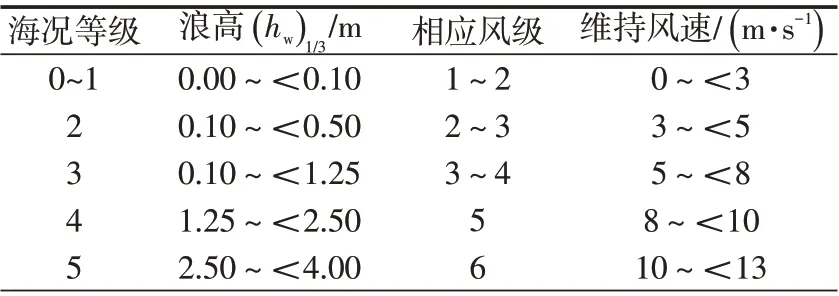
表1 海浪分级标准[2]及对应维持风速范围Tab.1 Sea wave classification standard and corresponding range of maintained wind speed
续表
综合国外舰载机使用情况,将4 级(含)以上海况等级(一般不会超过6级)称为“高海况”。
根据全球海洋环境统计数据显示,世界各国海军主要活动集中在北半球海域,出现3 级及以下海况的概率仅为22%~30%,出现4~6 级海况的概率则高达62%~67%[3],南半球海域海洋环境更加恶劣[4]。美国及北约其他国家、日本海上自卫队直升机大多具备5 级海况起降能力,也见有在6级海况起降的报道[5]。
2 高海况起降相关装备因素分析
直升机高海况起降相关装备影响因素主要包括舰船平台、直升机、起降保障设备等装(设)备的相关功(性)能。
2.1 舰船平台
2.1.1 舰船摇荡运动特性(耐波性)
1)摇荡运动幅值。
舰船在海浪激励下,会出现横摇、纵摇、艏摇、横荡、纵荡、垂荡等六自由度摇荡运动,摇荡运动幅值越小,对直升机起降安全越有利。因此,为提高直升机的高海况起降能力,对舰船在高海况时的摇荡运动幅值有上限要求。
以往研究发现,舰船横摇、纵摇、横荡(横向运动加速度)及垂荡(升沉加速度)对直升机起降安全影响相对较大(艏摇及纵荡对于保持航速和航向行驶的驱护舰而言,幅值通常比较小,一般不予考虑)。
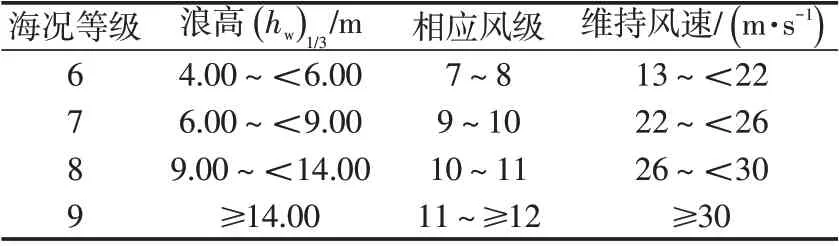
将横摇、横荡统称为横向运动;纵摇、垂荡统称为垂向运动。从图1 可以看出:直升机总距操纵与垂向运动相关性大(与垂荡相关性尤为大),与横向运动相关性小;在舰船运动主频率范围内,飞行员总距、周期变距、尾桨距操纵均与舰船运动存在相关性(1.5 rad/s以上频率段,飞行员操纵主要受舰船气流场影响);横摇与横荡相关性高;纵摇和垂荡同样存在相关性,但相对较低。用纵摇或垂荡表示母舰的垂向运动在一般情况下也是合适的,但对于护卫舰这一类升沉运动相对较大的舰船来说,纵摇和垂荡的相关性并不大。
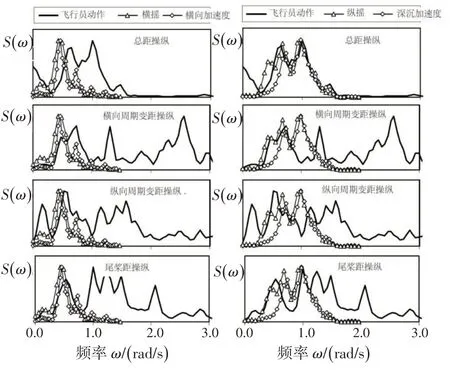
图1 加拿大“海王”直升机在“哈利法克斯”级护卫舰着舰时总距、横/纵向变距和脚蹬操纵与母舰横摇、纵摇、横荡、垂荡运动的相关性[6]Fig.1 Correlation between the collective,cyclic and pedal control of the Canadian Sea King helicopter and the roll,pitch,sway and heave motion of the Halifax frigate
垂荡更多与直升机下降触舰时机轮结构承受的力相关,而该力由下降速率决定,且飞行员难以直接获取实时垂荡信息,设置垂荡限制值对飞行员操纵直升机下降着舰(从悬停点下降触舰)意义不大,机轮结构在设计时预留一定的强度余量,飞行员依据经验判断合适的下降触舰速率更为可行。
基于以上分析,综合考虑横摇、纵摇相对于横荡和垂荡来说,更容易进行监测(测量)。国外直升机起降对母舰摇荡运动要求(耐波性要求)通常仅针对横摇、纵摇,比如起降风限图中,仅包含母舰横摇、纵摇限制值。高海况条件下,选取有利航向,驱护舰横摇、纵摇运动幅值(角度最大值)如果小于给定值,则直升机通常能够安全起降。如美SH-60B“海鹰”直升机具备5 级海况(浪高约为3.66 m)在“阿利·伯克”级驱逐舰上自由起降能力,此时要求该舰(有利航向)的横、纵摇运动幅值分别不超过8°和2°[7];另一种表述为,如果在该海况条件下,“阿利·伯克”级驱逐舰的横摇、纵摇角度小于上述值(还有合成风速、能见度等其他条件要求),则“海鹰”直升机的安全起降基本是可行的。
2)摇荡运动平稳期
由于波浪激励的随机性以及舰船本身具有的趋稳性,在舰船摇荡运动时间历程中,总会存在着幅度相对较小的时间窗口,即舰船摇荡运动平稳期(或称“静息期”“安稳期”等)。舰船摇荡运动平稳期持续时间长度不一,出现时机也无规律可循,如图2所示。
图2 加拿大“哈利法克斯”级护卫舰平稳期实测结果[6]Fig.2 Measured results of quiescent period of the Canadian Halifax frigate
实际上,直升机起降时,起飞离舰和着舰触舰动作,对舰船摇荡运动的适应能力是比较弱的。因此,在高海况条件下,直升机通常需要选择在舰船摇荡运动平稳期内完成离舰起飞和着舰触舰动作。另外,高海况条件下,直升机的舰面旋翼折叠/展开、开/关车等作业通常也需在舰船摇荡运动平稳期内完成。
不同舰船、不同海况,在平稳期出现情况均不同。海况越高,出现满足直升机起降需求的平稳期的概率越低;舰船摇荡运动特性(耐波性)越好,出现满足直升机起降需求的平稳期的概率越高。国外采用舰船横摇、纵摇1/3有义值来衡量舰船耐波性水平,因此,可采用舰船横摇、纵摇1/3有义值来衡量舰船摇荡运动平稳期出现的相对概率,即相同条件下,舰船横摇、纵摇1/3有义值越小,则该舰船出现满足直升机起降需求的平稳期的概率就越高。假设某直升机起降对舰船横摇、纵摇运动幅值要求分别为≤α°、≤β°,如果某舰在某级海况,有利航向航行时横摇、纵摇1/3有义值分别为≤α°、≤β°,则可认为该舰满足该直升机在该级海况下的起降需求;当然,为了进一步提高起降的可行概率,也可采用1/1 000值、1/2 000值等来对舰船耐波性提出要求。
2.1.2 起降平台及机库、上层建筑主尺度
1)起降平台长度。
仅从满足直升机起降角度出发,驱护舰起降平台主尺度(长、宽)越大越好,但起降平台主尺度还需综合考虑排水量、其他设备(舱室)布置、耐波性设计等因素。常规驱护舰起降平台的宽度一般都能满足直升机起降需求,但长度设计尚需深入分析。
考虑直升机起降的驱护舰起降平台长度典型设计思路:一是按照直升机正向进场方式,起降平台长度=全机长+最小安全距离+着舰散布量-尾桨半径;二是按照直升机斜角进场的方式,起降平台长度=(全机长-旋翼半径-尾桨半径)×斜角角度的余弦+最小安全距离+着舰散布量+旋翼半径。美“海鹰”系列直升机和北约NH-90直升机搭载于多国多型驱护舰上,驱护舰起降平台长度最小22 m,最大45 m;国外新研舰艇起降平台尺寸普遍在27 m 以上,但也有例外,如美“阿利·伯克”IIA在“阿利·伯克”II的基础上,保持主尺度不变,增加固定双机库,其起降平台长度由25.5 m减少至23 m,减少尺寸后仍可满足“海鹰”直升机起降需求,可能原因:一是采用斜角进场方式能减少直升机对起降平台长度需求;二是相比其他助降装置,RAST 助降装置采用“拉降”方式,能提高直升机着舰精度,减小着舰散布量。
另外,受舰船气流场影响,相比布置于舰艉部,布置于舰舯部的起降平台长度通常较小,这是由于驱护舰常规设计中,舰艉部起降平台与相邻机库、上层建筑的高度落差大,而舰舯部起降平台与艏艉两端上层建筑的高度落差小,后者气流场品质相对较优,起降平台长度可据此进行优化设计。
2)起降平台高度。
驱护舰起降平台距离海面高度较小,遇高海况或调整航行状态(如高速大角度调整航向)时,易出现起降平台上浪现象;舰船在高速航行时,存在“艉蹲”现象,使得艉部起降平台距离海面高度进一步减小。起降平台距离海面近,湿度、盐度也相对较大。较低的起降平台对直升机舰面驻停、起降及设备寿命均有不利影响。美国海军DDG-51、DDG-79驱逐舰和FFG-7护卫舰的起降平台高度都较低。DDG-51驱逐舰高速航行时,“艉蹲”现象相比其他驱护舰更为明显,在15 kn 以上航速,航速每提高1 kn,艉蹲15.24 cm[7];美海军1 艘DDG-79 驱逐舰(舷号DDG-110)曾在2013 年9月发生1 起高速航行叠加调整航行状态,导致起降平台上浪,进而导致驻停在起降平台上的直升机发生滑移坠海的事故,同级驱逐舰在此之前已发生多起由起降平台上浪引发的不同程度事故[8]。
美海军《载机舰船航空训练和作业程序标准化作业手册》(以下简称《标准化手册》)中,针对起降平台存在上浪对舰面装备、人员的潜在危害,给出了作业限制条件,以图3为例:在3~3.6 m浪高条件下,当起降平台上的直升机处于开车状态时,DDG-51 驱逐舰航速及航向不允许落在红色区域,否则会出现起降平台上浪导致直升机毁坏的风险。最危险航行状态点如图中“X”标示处,此时舰船航速25 kn,航向240°(相对浪向)。起降平台上浪还会威胁舰面作业人员安全,为此,该型舰航行状态也不能落在图中黄色区域。
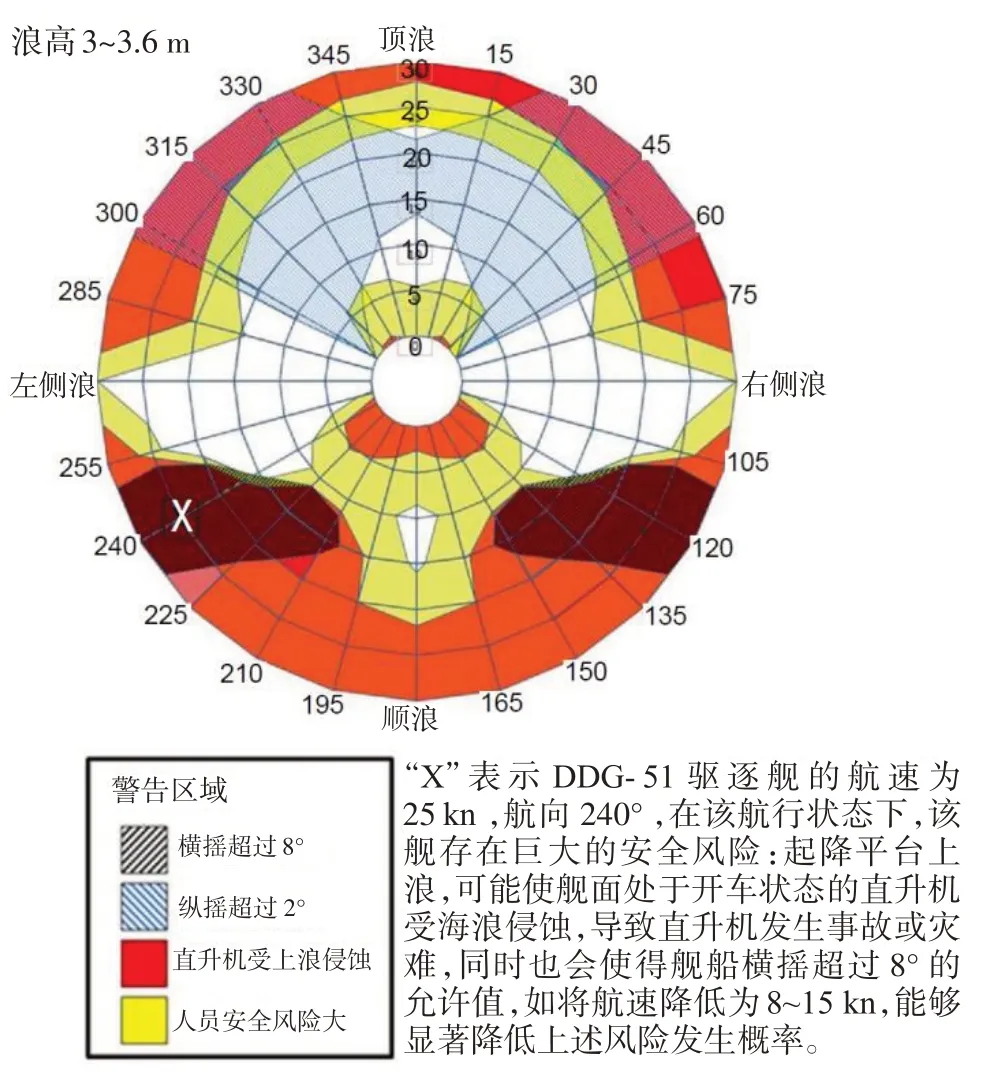
图3 不同航向航速时,美国DDG-51驱逐舰起降平台上浪潜在危害,此时浪高3~3.6 m[6]Fig.3 Potential harm of waves on the flight deck of US navy DDG-51 destroyer at different headings and speeds,with wave heights of 3~3.6m
3)机库及上层建筑主尺度。
相比陆基起降,直升机舰上起降环境的1 个很大不同点在于其存在着舰船气流场。舰船气流场是海上自然风受舰船上层建筑、机库等的阻挡,在起降平台邻近空域(直升机起降空域)形成的1 个非定常流场。区别于开阔空域内速度、方向恒定的自然风,舰船空气流的速度和方向在空域的分布显得“杂乱无章”,对直升机起降的影响十分复杂且是不利的。机库及上层建筑形状、物理尺寸是决定舰船气流场品质的关键因素。舰船气流场的紊乱程度通常随合成甲板风(即海上自然风与舰船航速、航向的叠加)[9]的风速增加而增加,同时也随合成甲板风的风向变化而变化。
已有研究表明,机库高度越低,舰船气流场对直升机起降的不利影响越小,例如:通过实船测试发现,俄“现代”级驱逐舰的起降平台布置在舰舯,与两端上层建筑的高度落差较小,相比起降平台布置在舰艉的其他型号驱护舰,其起降平台气流场品质更优;查阅《SH-60B 标准化作业手册》,美“海鹰”直升机在直通甲板舰船上起降时的抗风能力比常规驱护舰(非直通甲板)明显更强。
与机库情况类似,上层建筑主尺度越大,舰船气流场给直升机飞行员带来的操纵负担就越重。以英国皇家海军23 型护卫舰和“波浪”级油料补给船对比为例:综合测试得到的直升机飞行员操纵动作以及事后飞行员反馈,尽管“波浪”级补给船的起降平台面积更大,但直升机的起降能力边界却比23 型护卫舰小。其原因是:舰船气流场包含不稳定的漩涡结构,这些漩涡从上层建筑表面“脱落”,上层建筑主尺度越大,漩涡越大,速度越慢。漩涡大小与直升机主旋翼尺寸相当,在直升机上产生不稳定力矩,当飞行员试图通过控制抵消气流施加在直升机上的不稳定力矩时,不稳定力矩的频率将增加飞行员操纵负担,甚至导致出现飞行员诱发振荡。
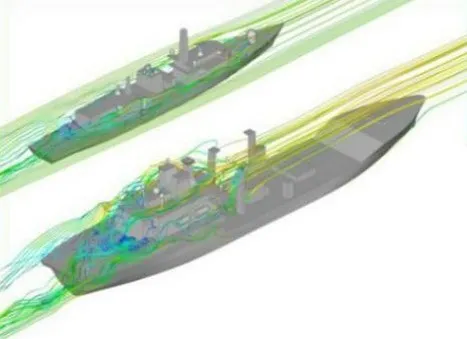
图4 英国皇家海军23型护卫舰(左上)和“波浪”级油料补给船(右下)在某风况下的空气流场图[10]Fig.4 Air flow field diagram of the Royal Navy Type 23 frigate(upper left)and Wave-class oil replenishing ship(lower right)under certain wind conditions
2.2 直升机
相比在陆上起降,直升机舰上起降对其性能(能力)有特殊要求,主要包括抗合成甲板风能力、适应舰船摇荡运动能力、旋翼舰面展开/折叠能力以及舰面开/关车能力等。
2.2.1 抗合成甲板风能力
直升机的抗合成甲板风能力通常用起降时能够适应的有利风向上的最大风速表示。陆基直升机的抗风能力通常仅用抗侧风能力来描述。相比陆基直升机,在舰上直升机起降时的风场环境更加复杂。如上文所述,驱护舰起降平台空域内存在不稳定气流场,不同的合成甲板风风向、风速对应不同的气流场特征,直升机抗合成甲板风能力本质上为抗不稳定舰船气流场能力。国际上通常用起降风限图来表示直升机起降时能够承受的合成甲板风范围[7],起降风限图为直升机起降能够适应的不同风向上的最大合成甲板风风速组成的包络,如图5所示(实际的起降风限图还包括允许的舰船摇荡运动幅值、起降路径、起降重量、能见度等要素)。
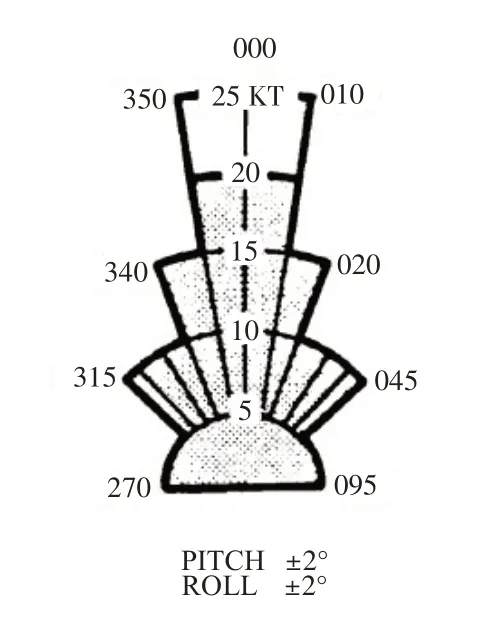
图5 起降风限图示意Fig.5 Schematic diagram of envelope of WOD of landing and take-off of naval helicopter
实际上,直升机的抗合成甲板风能力即起降风限图边界取决于直升机自身相关性能、舰船气流场环境(舰船设计)、能见度等多种因素,但其中最关键因素仍然是直升机自身的相关性能,如总距、周期变距、尾桨距操纵边界、发动机功率等。
2.2.2 适应舰船摇荡运动能力(自由起降能力)
对舰船摇荡运动的适应能力指直升机不使用快速系留设备时的自由起降能力,通常用能够适应的舰船最大横摇、纵摇表示。在《SH-60B 标准化作业手册》中,该型机的翻滚(rollover)特性由3 个指标来定义:一是静态翻滚角,指直升机在静态斜坡上驻停时(长轴与斜坡方向成90°)允许的最大斜坡角度(28°);二是临界翻滚角,指直升机在静态斜坡上起降时,当左前主轮在上坡方向,与坡面接触并能保持相对静止时,最大允许的斜坡角(12°),此时,需要100%横向操纵距方能保持机轮不会相对斜坡滑移;三是动态翻滚,指直升机起降一侧机轮触地时出现的横侧翻滚的趋势,当动态翻滚发生时,直升机绕一侧机轮(横向)转动,直到倾斜角超过一定角度,主旋翼的拉力将促使直升机继续翻滚,最终导致出现大的事故。动态翻滚是1 个复杂的动力学现象,难以用斜坡角度或横向操纵控制量等单一量化指标来标定临界值,但这些因素均直接影响动态翻滚的发生。对动态翻滚贡献最大的为直升机重心绕机轮与斜坡接触点的角速度,当角速度大小超过横向周期距能够施加的反作用时,直升机将在不超过2 s 内发生动态翻滚(这也是RAST、ASIST 等快速系留设备须要在2 s 内快速系留着舰直升机的原因),这种情况下,动态翻滚力距由直升机作用在轮—地接触点引起,机轮自由度约束将横向平移(滑移)转化为角运动,动态翻滚速度可能很大,这取决于直升机下降和漂移速度及机轮约束程度等。
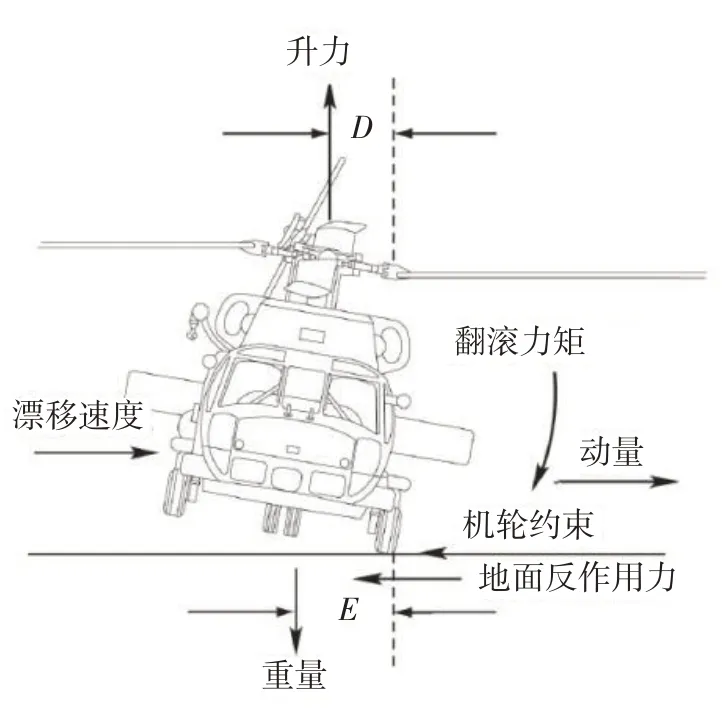
图6 美“海鹰”直升机动态翻滚原理示意图[11]Fig.6 Schematic diagram of dynamic rollover principle of the US Seahawk helicopter
直升机起降时,母舰同时在做六自由度摇荡运动,叠加舰船气流场影响,因此,直升机在舰上起降远比在陆上静态斜坡复杂,难以确定避免动态翻滚允许的舰船横摇、纵摇最大角度。在国外直升机的起降技术指标中,也未体现该类指标。在实际舰上起降作业中,为避免发生动态翻滚,往往采取比较保守的策略,一般选取横摇、纵摇的限制范围分别在4°~5°、1°~2°。
如前文所述,直升机选择母舰摇荡运动平稳期起降,因此,可以认为“平稳期”即为横摇、纵摇分别不高于4°~5°和2°的摇荡运动时间段。直升机在平稳期起飞前和着舰后,适应舰船摇荡运动的能力会有所提升(类似于临界翻滚角),如美“海鹰”直升机在“阿利·伯克”级驱逐舰上自由起降能力(不使用快速系留装置,即为适应舰船摇荡运动能力)为母舰横摇≤8°、纵摇≤2°,在“佩里”级护卫舰上自由起降能力为母舰横摇≤8°、纵摇≤3°[7]。在美海岸警卫队“传奇”级国家安全舰上的自由起降能力为母舰横摇≤8°、纵摇≤4°[12]。“海豚”直升机在上述舰船上的自由起降能力则比“海鹰”明显要低。另外,昼夜间的自由起降能力也是不同的。
综上,不同直升机在相同舰船上有不同的自由起降能力,同型直升机在不同舰船上、不同环境中也有不同的自由起降能力,表明直升机的自由起降能力取决于舰、机、人、环等多种因素,但直升机自身相关性能是关键。
2.2.3 开/关车旋翼抗挥舞能力
为便于在母舰有限空间内存放、转运,直升机主旋翼、尾梁通常需具备可折叠功能(自动或人工)。直升机旋翼及附属结构需要克服起降平台复杂气流环境,避免展开/折叠、开/关车时旋翼过量挥舞引发事故。在母舰横摇、纵摇,合成甲板风以及气流场的综合作用下,直升机主旋翼桨叶易在开/关车时(对于带旋翼刹车机构的直升机,则是在刹车松开后,发动机带动旋翼旋转的开始阶段)发生向下的过量挥舞,一旦出现该现象,将容易导致桨叶与机身、尾桨等部件之间的碰撞,造成不同程度的安全事故。
美海军H46 纵列式直升机自1964 年服役以来,在舰面实施开/关车的过程中,曾发生过上百次桨叶与传动轴的碰撞事故,轻则引起传动轴表面的变形或是表面撕裂,重则切断传动轴,损坏桨叶或是引起桨叶挥舞限动装置的失效[13]。桨叶的过量挥舞通常发生在开车阶段旋翼的最初几圈旋转过程和关车阶段的最后几圈旋转过程中,此时旋翼转速低,桨叶离心力刚化作用小,细长柔软的旋翼桨叶对海面突风或者紊流等外部气流作用非常敏感,耦合舰船升沉、纵横摇运动激励,桨叶容易产生过度挥舞、大扰度变形,导致桨叶与机身尾梁或者甲板等结构发生碰撞。
直升机舰面开/关车旋翼抗挥舞能力是指直升机在舰面开/关车时,在确保不出现旋翼过量挥舞事故前提下,允许的不同合成甲板风风向和对应最大风速组成的包络。在国外直升机标准化作业手册中,明确了直升机舰面开/关车包线,以指导舰面开/关车作业,同时,针对海上阵风等特殊情况,给出补充作业要求,如海上阵风大于10 kn 时,开/关车作业最大允许风速降低10 kn[7]。
2.3 起降保障装备
与直升机高海况起降直接相关的航空舰面保障装(设)备主要包括舰面保障设备和环境监测(测量)设备。
2.3.1 舰面保障设备
1)快速系留与牵引(转运)能力。
快速系留设备主要为直升机提供在舰船摇荡运动平稳期着舰后的快速系留功能,避免平稳期结束后直升机发生滑移、翻滚现象;牵引(转运)设备主要提供牵引和转运直升机出入机库功能。
目前,驱护舰主要采用3 种快速系留与牵引技术体制,分别为欧系“鱼叉-格栅”快速系留和SAMAHE装置或绞车牵引,俄系助降网防滑和绞车牵引,美系RAST、ASIST和TC-ASIST系统快速系留兼顾牵引。
俄系助降网装置利用织物网增大直升机轮胎与甲板间的摩擦系数,实现高海况条件下直升机着舰时的防滑移功能。直升机着舰后由绞车进行牵引。助降网装置起不到防止直升机翻滚的作用,即无快速系留功能,且备便时间较长,需要保障人员多,自动化程度低,难以适应高海况条件。
RAST、ASIST、TC-ASIST系统均具备5级海况下对直升机进行快速系留和牵引出入库功能(母舰横摇≤15°、纵摇≤4°),其中,①RAST系统通过连接直升机与舰面小车之间的钢缆,实现对直升机的“拉降”功能,可减小直升机着舰散布量;直升机着舰后,舰面小车可在2 s内自动“夹紧”直升机机腹下的“探杆”,实现对直升机的快速系留功能;小车可沿导轨运动,实现对直升机的牵引出入库。②ASIST系统无RAST系统的“拉降”功能,但舰面小车可随动跟踪起降平台上方跟进悬停的直升机,优势在于允许直升机着舰位置有更大的偏差,减轻飞行员操纵负担;待直升机着舰后,同样可在2 s内自动“抱紧”直升机机腹下的“探杆”,实现对直升机的快速系留;相比RAST 系统需要舰面人员进行连接钢缆作业,该系统可实现舰面无人化作业。③TC-ASIST系统是ASIST系统的1种演化版,采用“啮合”直升机主轮轴的快速系留方式,主要为满足未装备机腹“探杆”直升机的快速系留需求[14]。
RAST、ASIST和TC-ASIST系统兼顾快速系留和牵引直升机出入机库功能,快速系留与牵引适应海况通常相等;但对于“鱼叉-格栅”快速系留和SAMAHE装置或绞车牵引,快速系留适应海况与牵引通常不相等,因此,起降作业适应海况取“短板”,通常与牵引海况相同。
2)辅助着舰能力。
辅助着舰设备(设施)主要为直升机提供理想下滑路径引导、舰船实时横摇角度及水平基准、理想着舰点(区域)位置提示、舰船运动预报等信息(功能)。
目前,主要依据指挥员和飞行员经验进行舰船摇荡运动平稳期识别、预判,存在精度、效率低,对人员经验要求高等不足。国外已开展基于摇荡运动历史数据和实时浪高测量2种技术体制的舰船摇荡运动平稳期识别(预判)研究[15-16],旨在通过机器自动识别、预判舰船摇荡运动平稳期,辅助指挥员和飞行员高效决策起降时机。
基于舰船摇荡运动历史数据的起降时机辅助决策设备,在国外已上舰使用,如英国AGI 公司研制的着舰时机指示器(landing period designator,LPD),它的基本原理是:基于测量得到的前一时间段和当前的舰船摇荡运动数据,计算出起降平台运动能量系数(EI),根据EI大小将当前起降平台满足直升机安全起降的程度分为“安全”“警告”“危险”3 种状态,并以绿色、黄色、红色3种不同颜色信号灯向指挥员和飞行员传达状态信息,在LPD 的辅助下,结合指挥员和飞行员经验,能够显著提高起降平台摇荡运动平稳期捕获概率,从而提高直升机起降效率和安全性[17]。

图7 英国AGI公司研制的LPD设备[17]Fig.7 LPD equipment developed by AGI,UK
满足直升机起降作业需求的舰船摇荡运动平稳期预报,预报时长宜在15 s以上,但基于舰船摇荡运动历史数据的平稳期预报难以满足该要求。为实现该预报功能,国外主流采用基于实时浪高测量的平稳期预报技术[16]:利用测浪设备实时监测远方来浪方向和距离本舰一定距离的浪高特性,进而结合波浪空间传播预报技术计算舰船一段时间后将遭遇的海面波高,再利用海浪激励下的舰船运动响应预报技术实现舰船摇荡运动预报。基于实时浪高测量的平稳期预报系统在国外尚处于海上试验阶段,目前尚未发现有上舰装备。
2.3.2 环境监测(测量)设备
如上所述,直升机起降受能见度、风、海浪等环境因素影响,因此,对这些环境因素的监测(测量)即环境监测(测量)设备的功(性)能也是需要关注的影响直升机高海况起降的装备因素。在多种环境因素中,对风的监测(测量)相对复杂。
国外直升机起降必须以起降风限图为依据,需要实时监测合成甲板风、海上自然风,据此判断风况是否落在起降风限图包络以内。测风设备安装在起降平台会干涉直升机正常起降,同时也会受到直升机旋翼气流影响,因此,目前,国外驱护舰通常在舰船桅杆顶端左右对称处布置风速计来测量舰船相对海上自然风的风速、风向(合成甲板风)。但受舰船上层建筑带来的气流影响,布置在桅杆顶端的风速计测量得到的风速、风向与实际存在偏差。为减小气流干扰导致的偏差:对于左舷来风,一般采信左边布置风速计测量结果;对于右舷来风,一般采信右边布置风速计测量结果。但即便如此,仍然与实际存在最大约20%的偏差(见图8)。而根据要求,风速计记录的风况数据与实际偏差不能超过±10%,否则数据不可用。
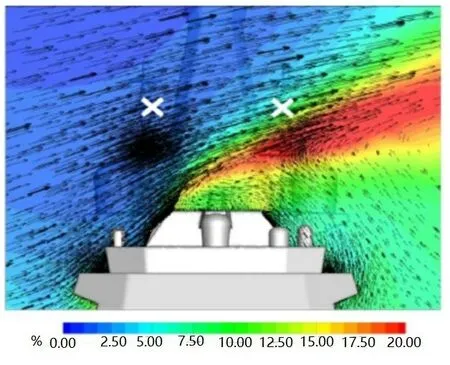
图8 湍流强度云图和速度矢量图,风速40 kn、风向左舷90°[18]Fig.8 Turbulence intensity cloud diagram and velocity vector diagram,with a wind speed of 40 kn and wind direction of 90°to the port
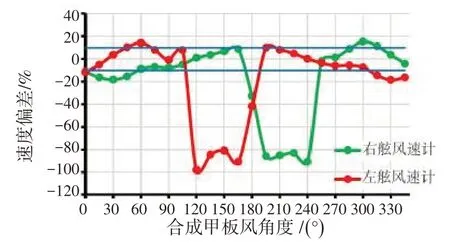
图9 不同风向角风速计位置测得的风速与真实风速的偏差[18]Fig.9 Deviation between wind speed measured by anemometer at different wind directions and true wind speed
针对上述情况,目前有两类方法:一类是采用矫正算法,对风速计测量得到的数据进行矫正,如荷兰海军采用的Wind Correction Algorithm(WCA)算法[9];另一类是未来技术发展趋势之一,即采用激光测风这种非介入式测风手段,在解决驱护舰上的适装性、小型化以及经济性等问题后,这一方法有望在驱护舰上得到使用。
2.4 其他装(设)备能力需求
飞行员视野(目视引导)是确保起降成功的另一关键因素,飞行员在起降关键阶段,需要通过目视来判断直升机相对母舰的位置、距离和姿态。因此,针对高海况起降,直升机座舱也需要有针对性设计,最大限度保证飞行员和机组人员可以通过目视感知外部起降环境。
此外,为降低飞行员操控负担,直升机通常还需具备自动低速跟进悬停等功能。直升机着舰前,在起降平台着舰点上方低速跟进悬停时,为能在遇到突发情况时成功复飞,从有低效情况转入无低效情况(飞越起降平台边缘),发动机需要有10%左右的剩余功率[19]。为能在特殊情况下起降作业,通常还需给飞行人员配备夜视设备。高海况着舰,舰艇摇荡运动相对较大,特别是纵摇和深沉运动,直升机下降时,起落架受到相对较大冲击,起落架强度需要有专门设计等。
3 结论
直升机高海况起降能力在装备方面的影响因素中,直升机自身的相关功(性)能最为关键,它也是决定舰机总体能力边界(能力包络大小)的决定性因素。直升机在高海况下起降,为提高着舰位置精度、起降安全性并减轻驾驶员操纵负担,飞控系统是直升机今后改进的主要方向之一,如提高舰船气流场环境中的相对位置控制、姿态控制、四轴解耦控制等方面能力。
舰船两大相关功(性)能中:摇荡运动水平在驱护舰舰型无大的变化、吨位不断增加、减摇技术相对成熟的背景下,已基本趋于稳定;舰船气流场由于需要兼顾更多其他因素,往往是舰船交付后的“既定事实”,设计阶段的舰船气流场优化实际并无多大空间。针对直升机高海况起降需求,舰船今后需要在摇荡运动预报、起降环境监测、无人化舰面保障作业、气流场主/被动控制[20-21]、计算机辅助人员指挥决策等方面下更多功夫。
直升机起降是1 个舰、机、人、环等多因素耦合的复杂系统问题,后续研究需要对该系统各因素的耦合机理有更深的理解。除装备因素外,试验试飞、人员训练等因素也至关重要。舰机一体海上实装试验试飞是掌握该复杂系统能力边界,发现舰机适配设计不足和问题的科学手段,得到的“起降风限图”是部队训练的基本依据。该复杂系统的能力边界也取决于参与起降作业人员,特别是飞行员(试飞员)的技能水平,国外实践经验表明,试验试飞后交付部队的“起降风限图”,可以在后续长期实践过程中,通过不断挖掘人装结合潜能,进一步扩充其边界[7],这也证明了“人”在直升机高海况起降能力形成中的重要作用。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
科学大众(2021年21期)2022-01-18 05:53:46
舰船科学技术(2021年12期)2021-03-29 01:28:44
装备制造技术(2020年3期)2020-12-25 05:22:08
深空探测学报(2016年2期)2016-05-17 05:19:19
超硬材料工程(2016年1期)2016-02-28 22:20:05
舰船科学技术(2016年1期)2016-02-27 15:39:26
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:14
