
基于加速度传感器的车灯控制系统的研究
2023-05-05 02:31徐健王刘邓婕
汽车零部件 2023年4期
徐健,王刘,邓婕
常州星宇车灯股份有限公司研究院,江苏常州 213000
0 引言
汽车作为现代社会重要的交通工具,是衡量一个国家物质生活水平高低的重要指标。因此,各个发达国家对汽车产业的发展极其重视。中国汽车工业正在高速增长,据交管部门统计,70% 的交通事故都发生在夜间[1-2]。其中,照明条件不良是主要原因。为保证驾驶员在不同道路和不同行驶状况下都能获得较好的视场条件,迫切需要前照灯的照射光型及角度的自适应变化[3]。因此,汽车自适应前照灯系统的研究和发展成为改善汽车夜间行驶安全的关键方向。
目前现有技术中,在前照灯高度调节方面普遍应用了车身高度传感器。通过安装在车辆前左、前右、后左、后右4处车辆悬挂处的车身高度传感器实时监测车辆的姿态,并将车辆姿态信息发送给前照灯控制器,以实现最佳的前照灯高度调节。由于现有技术方案使用了较多的传感器,同时信号传输多为模拟信号,即通过不同的电平值以表示车身不同的姿态[4-5]。因此,现有技术方案不但系统构成复杂、生产成本高,而且抗干扰与可靠性都相对较低。
为了解决上述问题及满足行业发展的需求,提出了一种基于加速度传感器的车灯控制系统及其控制方法,加速度传感器的采样灵敏度高,可以检测出任意的异常抖动,当汽车遭遇颠簸干扰时,加速度传感器的输出值高于正常状态,因此可以实时检测车身姿态。本文采用一个加速度传感器代替传统技术方案中的4个车身高度传感器,简化系统构成,提高采样精度;同时使用数字信号线代替模拟信号线,有效提升系统信号传递的可靠性。
1 车灯控制系统的总体设计
本文提出的车灯控制系统包括BCM、G-sensor控制单元、车灯控制单元3个部分。BCM为车身控制模块,主要提供车辆状态信息、前方道路状态信息。G-sensor控制单元主要有加速度传感器、MCU芯片、CAN收发器和LIN收发器,加速度传感器测算当前车辆的纵向加速度值(简称G值),并实时将G值发送给MCU芯片,MCU芯片根据接收到的G值,判断出当前车辆的车身姿态。车灯控制单元主要有MCU芯片、电机驱动芯片、LED驱动芯片、LED矩阵管理芯片及CAN收发器和LIN收发器,接收G-sensor控制单元的车身姿态信号,并根据预设的姿态调节值对前照灯高度进行调节。BCM与G-sensor控制单元之间通过CAN总线相连,G-sensor控制单元与车灯控制单元通过CAN总线和LIN总线相连,其系统架构如图1所示。

图1 系统架构
2 车灯控制系统硬件设计
G-sensor控制单元中的MCU芯片硬件原理如图2所示,加速度传感器硬件原理如图3所示。MCU芯片的PTB0脚、PTB1脚、PTB2脚和PTB3脚分别与加速度传感器芯片的CSB脚、MISO脚、SCK脚和MOSI脚相连。其中,CSB脚为加速度传感器芯片的片选信号脚,属于芯片控制信号脚的一种;MISO脚为加速度传感器芯片的信号输入脚,用于接收MCU芯片的配置及控制命令;MOSI脚为加速度传感器芯片的信号输出脚,用于将其检测到的信号输出至MCU芯片;SCK脚为时钟信号脚,用于向加速度传感器芯片输入所需的时钟信号。

图2 MCU芯片硬件原理

图3 加速度传感器硬件原理
CAN收发器硬件原理如图4所示。MCU芯片的PTE5脚和PTE4脚分别与CAN收发器U2的TXD脚和RXD脚相连,CAN收发器U2的CANH脚和CANL脚与BCM端相连,用于接收BCM发送的车辆状态和前方道路状态等信息,并最终传送至MCU芯片。
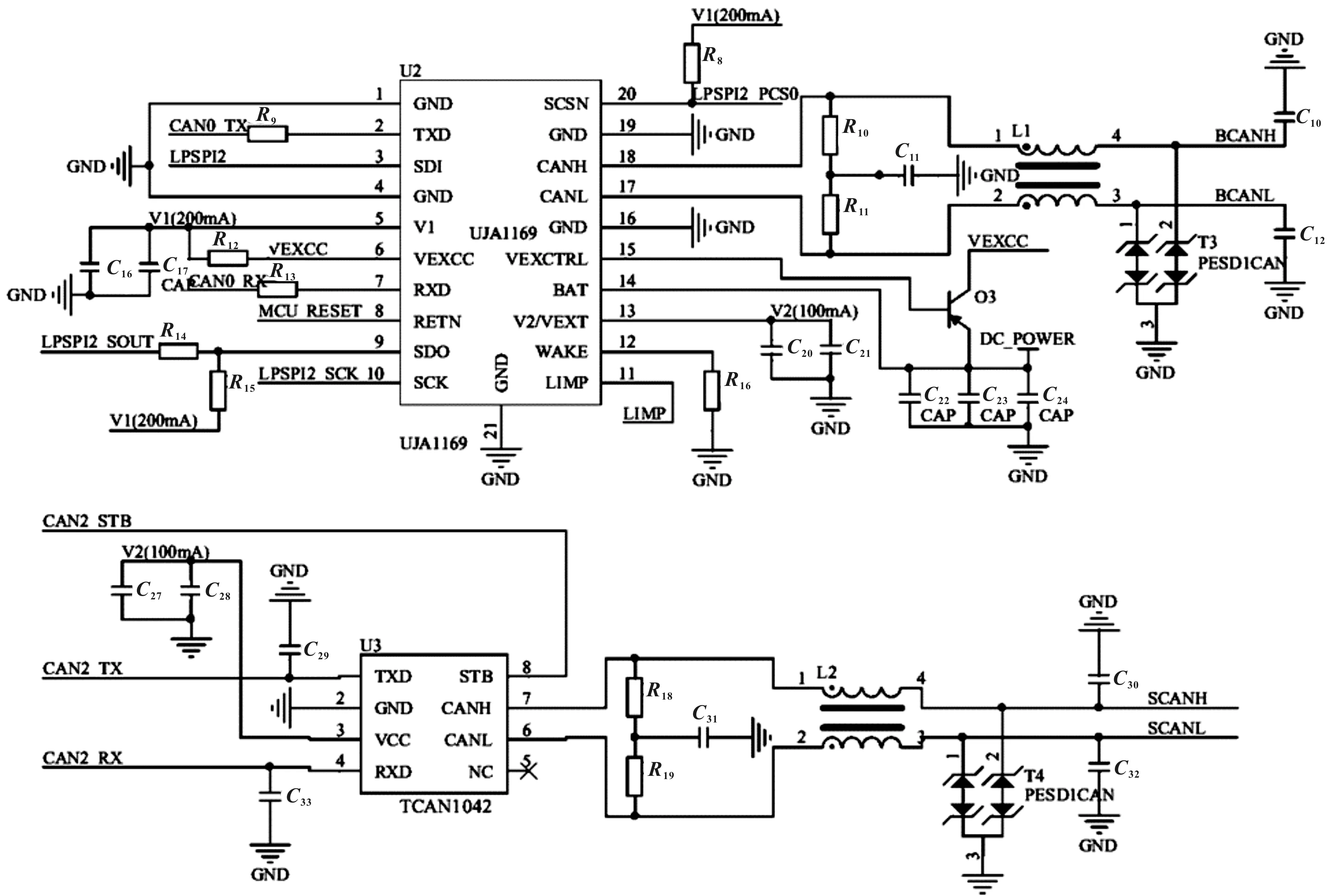
图4 CAN收发器硬件原理
LIN收发器硬件原理如图5所示。MCU芯片的PTD6脚和PTD7脚与LIN芯片的RXD与TXD脚相连,LIN芯片的LIN脚与左、右车灯控制器端相连。MCU芯片通过LIN信号线向左、右车灯控制单元实时发送前照灯高度调节指令。MCU芯片的PTC17脚和PTC16脚分别与CAN收发器U3的TXD和RXD脚相连,CAN收发器U3的CANH脚和CANL脚与左、右车灯控制单元相连,并通过CAN总线向左、右车灯控制单元实时发送灯光的亮/灭,以及灯光亮度控制指令。
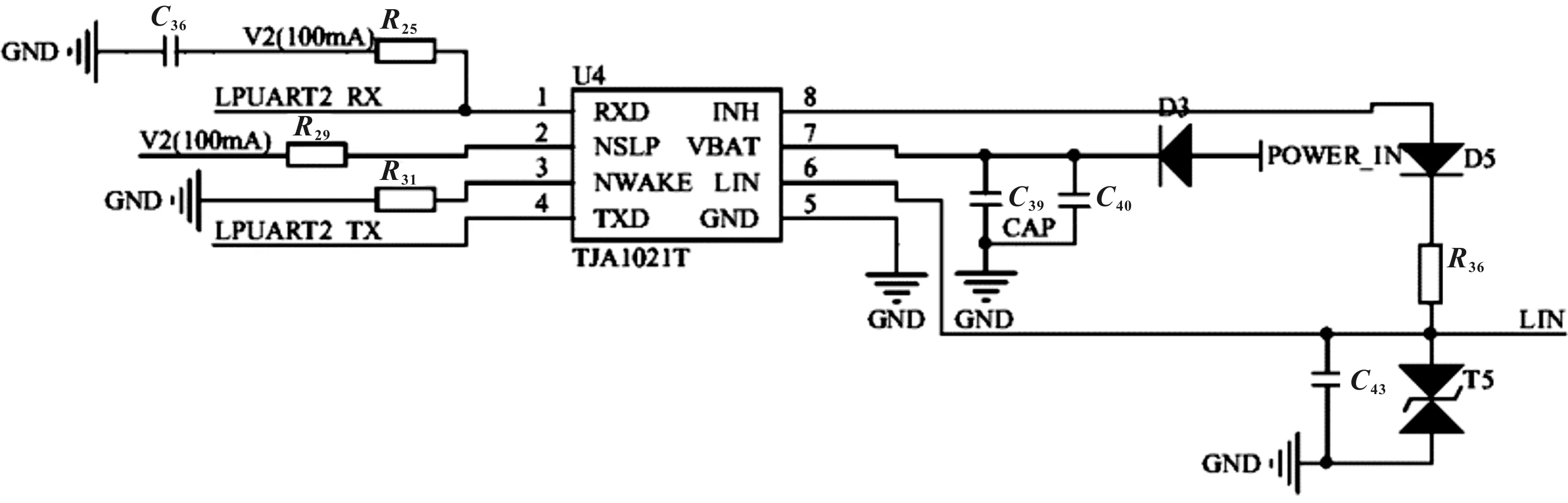
图5 LIN收发器硬件原理
作为优选,本文所述的G-sensor控制单元中的MCU采用NXP公司的S32K144-64芯片,加速度传感器采用村田公司的SCA3300-D01芯片,CAN收发器U2采用NXP公司的UJA1169芯片,CAN收发器U3采用德州仪器公司的TCAN1042,LIN收发器采用NXP公司的TJA1021T芯片。进一步,G-sensor控制单元安装于车辆中轴线上,并置于车辆前部。作为优选,本文所述的G-sensor控制单元安装于驾驶舱内的前挡风玻璃下方,车机的后部区域;或者安装于发动机舱内的前防撞横梁上。
3 车灯控制系统算法设计
3.1 算法流程
在完成硬件电路图设计后,本文还设计了一种包含角度过滤器的算法,可直接过滤颠簸干扰,提高角度计算准确性。该算法包含加速度传感器、角度直接计算单元、角度过滤单元、角度输出单元和控制单元,算法流程如图6 所示。
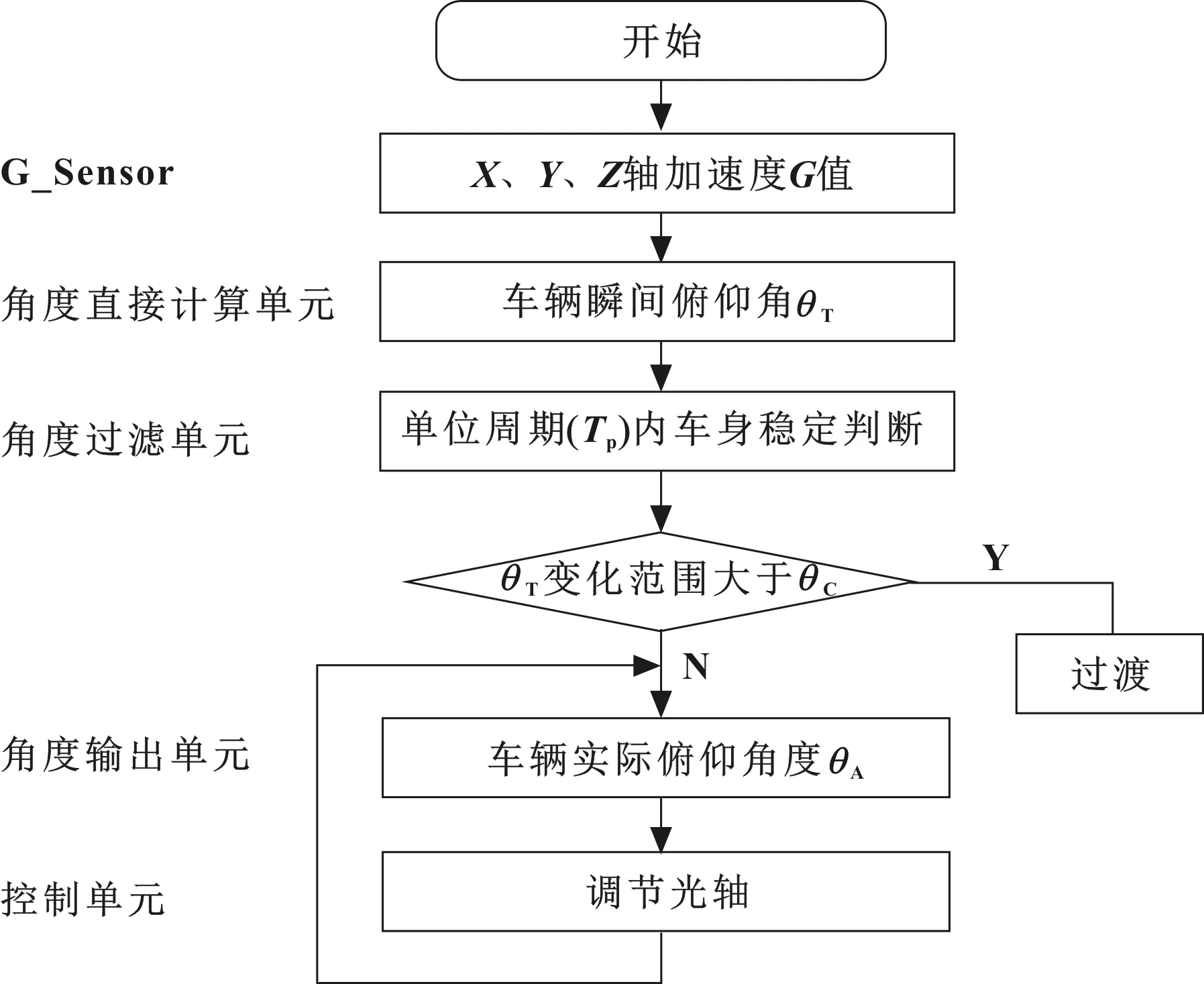
图6 算法流程
在系统上电后,加速度传感器周期性测算当前车辆的加速度G值,并实时将G值发送到角度直接计算单元,计算车辆瞬时俯仰角θT,角度过滤单元进行车身稳定性判断,并过滤波动期间的瞬时角度,角度输出单元计算车身真实角度θA,并输出给控制单元进行光轴调节。
3.2 算法工况验证
控制器会周期性地采集G-sensor的输出值,实时判断车辆角度的有效性。采样周期内采集的车辆瞬时角度的最大角度与最小角度的差值为ΔθAB,角度过滤阈值为θC,当角度采样周期内ΔθAB值小于θC时,判定此时车辆为稳定状态,设置此采样周期内的角度为有效角度,并将此周期内的瞬时角度发送至角度计算单元,然后输出车辆实际俯仰角,最终控制光轴。当角度采样周期内ΔθAB值大于θC时,判定此采样周期内车辆为颠簸状态,设置此采样周期内的角度为无效角度,直接过滤此采样周期的瞬时角度,并保持当前的光轴位置,如图7所示。
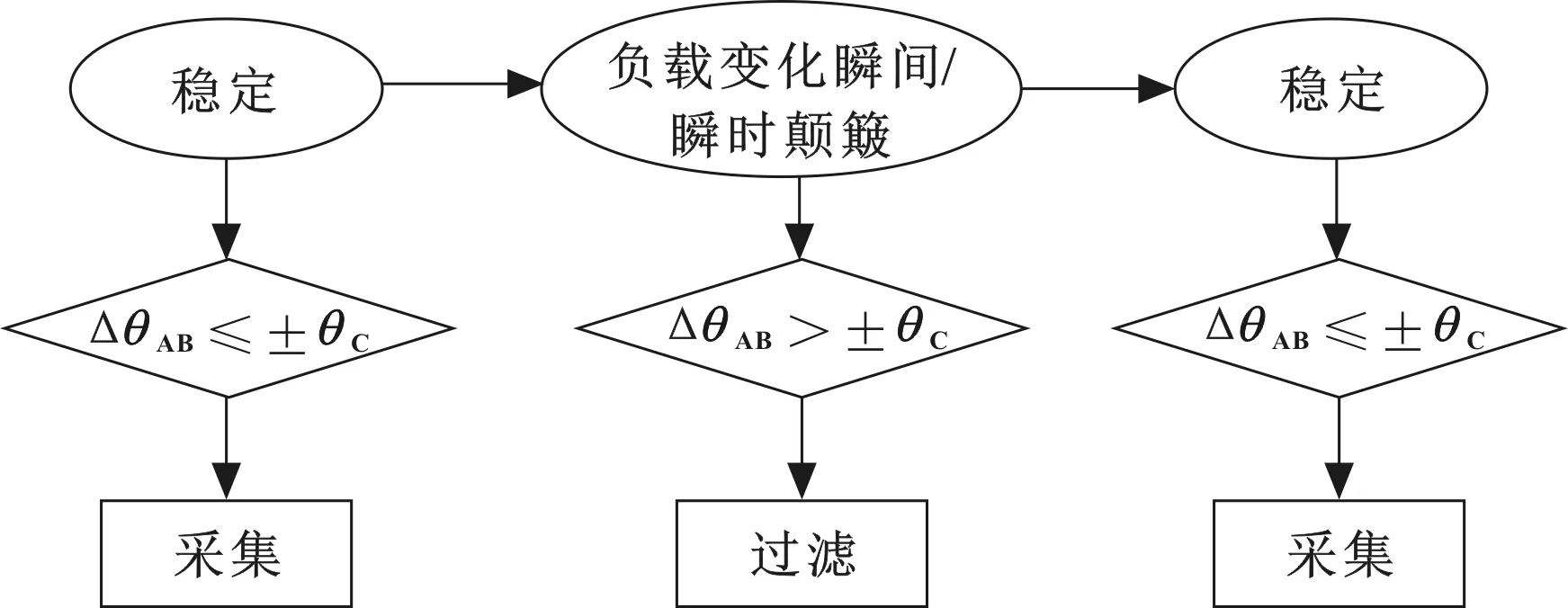
图7 算法过滤信息
经过角度过滤后,角度计算单元采样到的角度均为有效角度,可以减少车辆剧烈的晃动对最终车辆真实俯仰角的影响,增加了光轴位置计算的准确性。
如图8和图9所示,坐标轴t为时间轴,分为静态、负载变化、负载稳定3个时间段。坐标轴θT表示车辆瞬时角度,每个采样周期内瞬时角度的上下阈值分别用θmax、θmin表示。静态和负载稳定时间段内瞬时角度变化ΔθAB小于滤波阈值θC,此时判断车辆瞬时角度为有效角度,采集该时间段的瞬时角度。负载变化区间内,则可以瞬时角度变化ΔθAB大于滤波阈值θC,此时判断车辆瞬时角度为无效角度,直接过滤此时间段的瞬时角度。
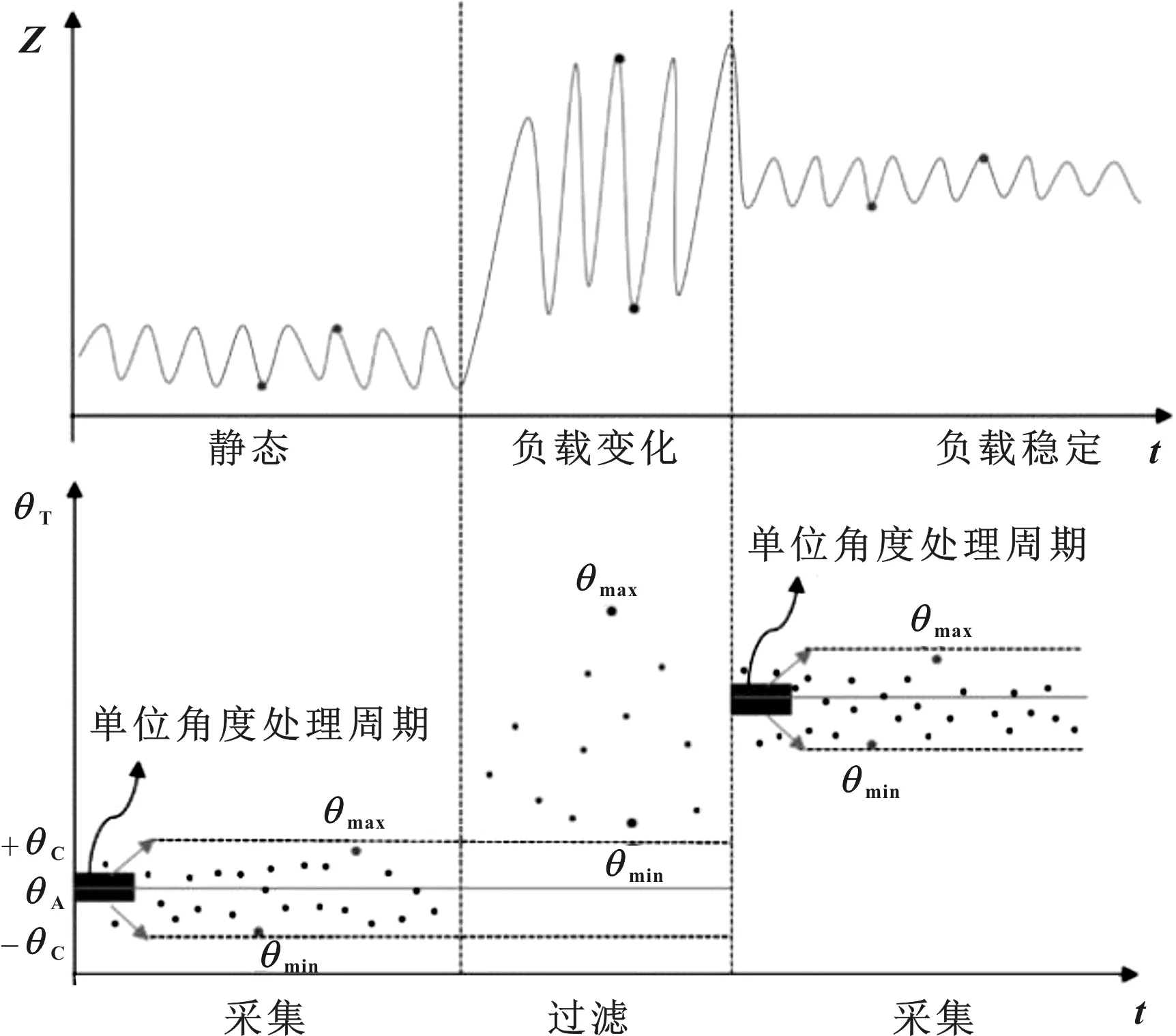
图8 负载增加时角度信息采集
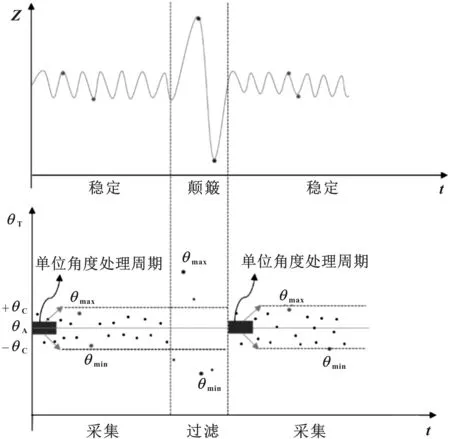
图9 瞬时颠簸时角度信息采集
4 结论
本文针对现有车灯技术中系统结构复杂、成本高及抗干扰与可靠性偏低等问题,提出了一种基于加速度传感器的车灯控制系统及其控制方法,可实现采用加速度传感器替代现有车灯技术中的前后车身高度传感器,进而实现对车身姿态的实时监测,是对现有车灯ALS功能的一次技术升级。与传统技术方案相比,本文所提出的方法具有以下两点优势:
(1)系统构成简化,成本降低。通过本文所述的技术方案,作为前照灯高度调节的传感器由现有技术方案中的4个减少为1个加速度传感器。有效降低了线束成本、硬件成本及生产安装调试成本。
(2)系统可靠性提升。通过本文所述的技术方案,将现有方案中的模拟信号线替换为数字信号线,通过数字信号本身的抗干扰优势,有效提升了系统信号传递的可靠性。
猜你喜欢
机械工业标准化与质量(2023年7期)2023-09-25
世界汽车(2022年11期)2023-01-17
华人时刊(2019年13期)2019-11-26
现代电子技术(2017年14期)2017-07-25
重庆文理学院学报(社会科学版)(2017年2期)2017-05-03
铁道通信信号(2016年5期)2016-06-01
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
汽车科技(2014年6期)2014-03-11
