
光电阵列动态扫描式弹丸坐标及速度测量方法
2023-05-05 03:01:42武锦辉仝修亮于丽霞
探测与控制学报 2023年2期
赵 磊,刘 吉,武锦辉,仝修亮,于丽霞
(中北大学信息与通信工程学院,山西 太原 030051)
0 引言
在武器的生产研制中,武器的射击精确度和速度是衡量武器系统性能的重要参数,目前的测试装置通常只涉及武器的坐标测量或只涉及武器的速度测量。目前有多种弹丸着靶坐标测量的方法[1],如传统的天幕靶[2-3]、声靶[4-6]、组合光幕靶以及CCD立靶[7-10]。组合光幕靶在坐标测量上测量精度受限于激光器尺寸[6]、光路复杂不易搭建[12-13]、光幕不均匀[14]、不易拼接[15]、计算复杂[16-17],且通常武器测试中环境恶劣,干扰大。为解决这些问题,本文提出一种光电阵列动态扫描式弹丸坐标及速度测量方法,测试系统采用红外发光管作为光束的发送器件,光电二级管作为光束的探测器。
1 模型及测量原理
系统主要由铝合金靶架、交错式矩形探测阵列以及相应的信号处理电路组成,如图1所示。红外发光阵列和光电探测阵列分别由多个红外发光管和多个光电二极管组成,探测光幕由多组发光阵列和探测阵列构成且发光阵列与探测阵列之间交错排列。靶面上的红外发光管与光电二极管一一对应,发光管的发光波段为940 nm,为提高系统的精度和防止其他波段的杂散光线对系统造成干扰,采用由两排元器件交叉等距排列的阵列且在阵列前设置与其波段相对应的滤光片,采用较小发散角的红外发光管,避免探测阵列在系统发光阵列同时工作时受到其他发光阵列的影响。
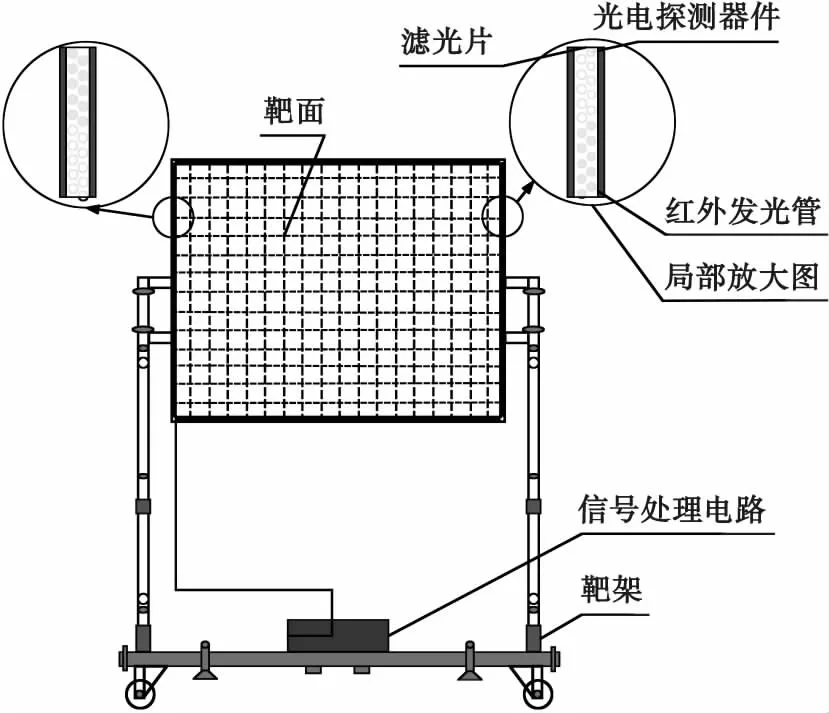
图1 系统总体组成示意图Fig.1 Schematic diagram of overall system composition
1.1 坐标测量原理
以靶面的水平方向作为x轴,以靶面的竖直方向作为y轴,如图2所示。弹丸穿过靶面时,会遮住探测阵列上的光电二极管,产生相应的坐标信息。在发光阵列中,红外发光管以一定周期依次点亮且同一时刻只能有一个红外发光管点亮;在探测阵列中,光电二极管以相同周期被依次选通且同一时刻只能有一个光电二极管被选通,红外发光管和对应光电二级管在相同的时间分别被点亮和选通形成一条光路。图2中的箭头为阵列中发光管的点亮方向和光电二极管的选通即光电阵列坐标靶的扫描方向。系统采取红外发光管与光电二极管一一对应的方式保证了光幕的均匀性,便于后续的信号处理且提高了系统的稳定性。
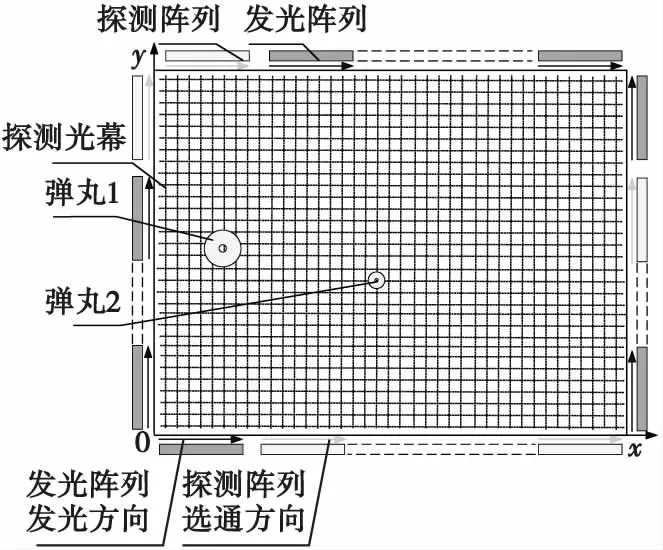
图2 弹丸过靶示意图Fig.2 Diagram of projectile passing target
1.2 速度测量原理
系统基于光电阵列动态扫描式测量法,每个红外发光管发送周期性信号,弹丸在通过靶面时因受弹丸体积的影响会遮挡相应的光电二级管且遮挡的时间与其扫描的周期数有关,通过弹丸长度和过靶时间求出弹丸的过靶速度,构成单靶测速系统。
2 坐标和速度计算及其误差分析
2.1 坐标计算
在靶面中,当某一点位无弹丸通过时,选通光电二极管时会接收到其对应的红外发光管的光信号并输出相应的信号;当某一点位有弹丸通过时,选通光电二级管时因为被弹丸遮挡而不能接收其对应的红外发光管的光信号,所以没有相应的信号输出,系统采取这种方式对弹着点坐标进行识别,示意图如图3所示。
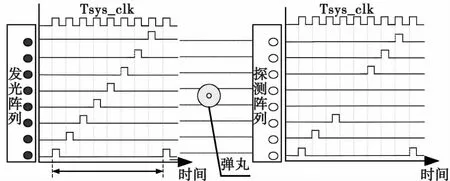
图3 过靶信号坐标测量示意图Fig.3 Diagram of coordinate measurement of over target signal
在弹丸过靶中,当弹丸较小时,只遮挡了一个光电二级管,假设该接收管在横轴上的位置为A,在纵轴上为B,假设相邻两个光电二级管的中心距离为D,则弹丸的坐标位置为
当弹丸较大时,遮挡了多个光电二极管,采用对光电二极管求平均的方法求取弹丸的坐标:
2.2 速度计算
基于光电阵列动态扫描的方法,弹丸在通过探测靶面时遮挡相应光电二极管使得发射管发射的脉冲式信号不能被接收,被遮挡住的脉冲数可转换为弹丸过靶时间t,已知弹丸长度l可求出弹丸速度v,示意图如图4所示。
v=l/t。
(5)
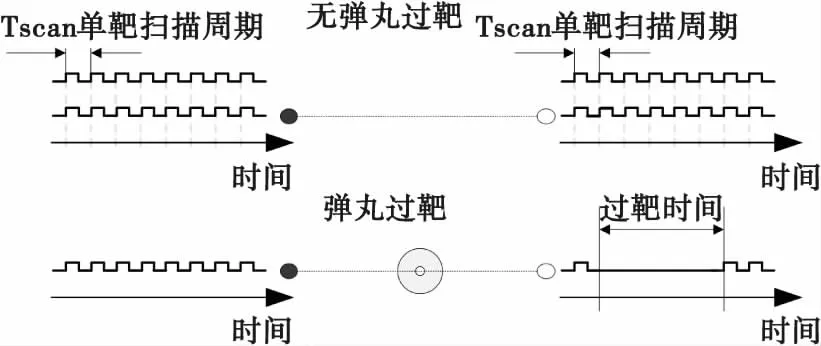
图4 过靶信号速度测量示意图Fig.4 Schematic diagram of velocity measurement of over target signal
2.3 误差分析
2.3.1坐标误差分析
系统的坐标误差ε(d)主要由光电探测阵列的分辨率引起,不同直径的弹丸在不同位置时会得到不一样的坐标误差ε(d)。由图5可知,弹丸穿过靶面时,遮住的光电二极管的长度等于弹丸自身的直径,在不考虑其他因素的条件下,对弹丸过靶时遮住光电二极管的情况进行分析,进而得到最大误差。
假设光电二极管被弹丸遮挡50%时才能输出有效信号,假定光电二极管的间距为d,尺寸为2r,弹丸的直径为6 mm。当弹丸过靶时可以遮住的光电二极管的数量为m/d或m/d+1这两种情况。
若弹丸直径可以整除光电二极管的间距且刚好遮挡情况为m/d时,则检测到的最大误差为
ε(d)=d/2。
(6)
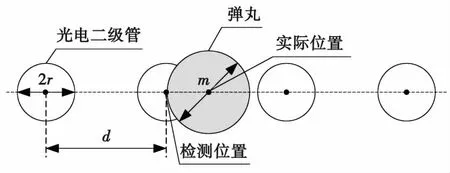
图5 弹丸过靶误差示意图Fig.5 Schematic diagram of projectile passing target error
若弹丸直径不能被光电二极管的间距整除时,则其被整除后的小数部分k将会对系统的误差做出贡献,则此时检测到的最大误差为
ε(d)=(d×k)/2,
(7)
可知弹丸的坐标误差范围为[0,d/2)。
2.3.2速度误差分析
系统的速度误差主要由过靶时间测量误差ε(t)引起,假设系统的系统时钟频率为fsys_clk,每个探测阵列由n个光电二极管组成,则单靶扫描频率为fscan=fsys_clk)/n,则其最大时间测量误差为
ε(t)=1/fscan,
(8)
对系统进行建模并获得其最大误差关系式,系统坐标测量的准确度与发光二极管之间的间距d有关,在弹丸的直径不小于d/2的情况下,间距d越小则弹丸测量坐标得到的结果越准确。系统速度测量的准确度与系统单靶的扫描频率有关,在满足系统的低延时特性后采用200 kHz的单靶扫描频率可以满足具有多种发射速度弹丸的速度测量。
3 实验与结果分析
3.1 模拟弹丸坐标检测实验
为验证系统的坐标测量功能以及测量精度,采用探测区域为50 cm×50 cm,探测器件的间距为2.5 cm,直径为6 mm的圆柱形磁铁棒作为模拟弹丸,将模拟弹丸穿过测量幕面吸附在与系统有效测量靶面相对应的钢板平面范围内的任意位置,并使得磁铁棒与测量幕面垂直,在靶面后放置一张可做测量结果参考的纸靶,如图6所示。将其放置在有效靶面的不同位置,系统可检测到靶面内的弹丸过靶信号,将系统所测得的弹丸坐标与相应的纸靶坐标记录在表1中。

图6 模拟弹丸着靶装置Fig.6 Simulation of projectile hitting target device
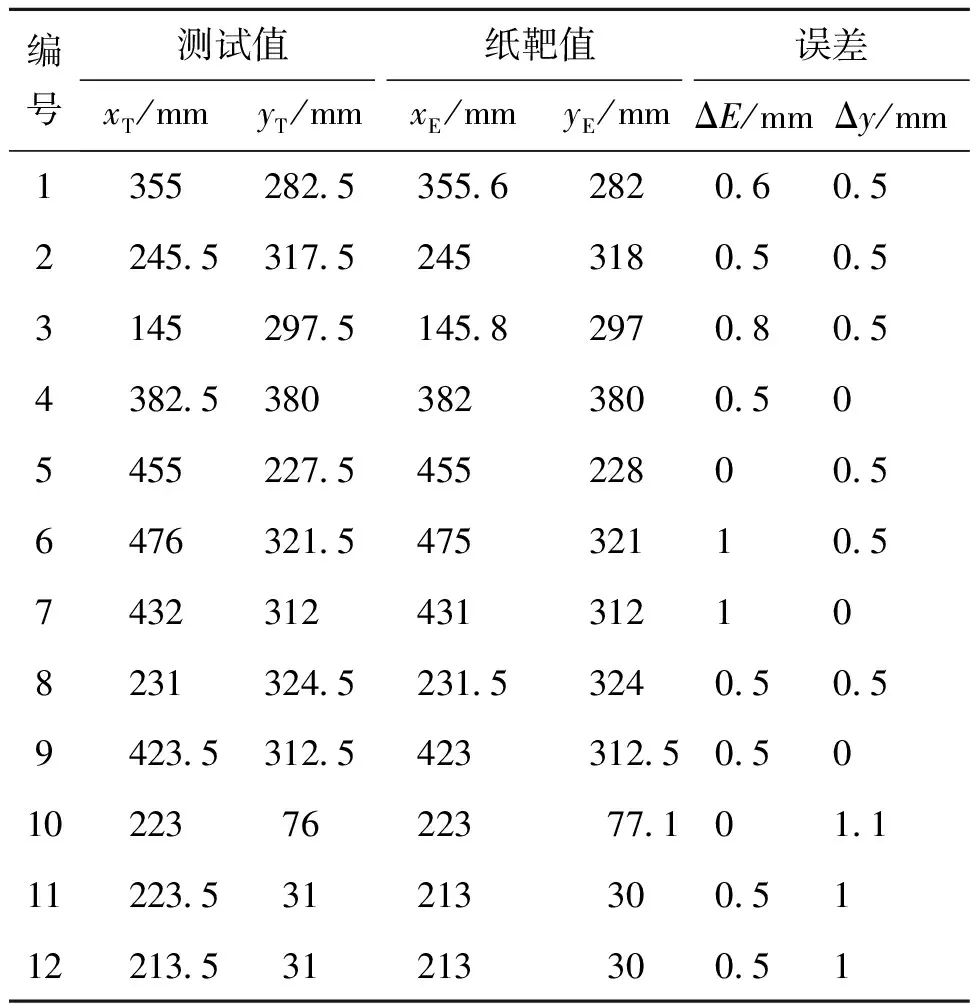
表1 模拟弹丸着靶实验测量数据Tab.1 Simulate the measurement data of projectile hitting target experiment
从表1中可以看出,弹丸在x轴方向的最大测量误差为1.1 mm,在y轴方向的最大测量误差为1 mm。
3.2 模拟弹丸速度检测实验
为验证系统的速度测量功能及其测量精度,使用扫描频率为200 kHz的单点探测,通过气动导轨推动长度为2 cm的金属头模拟弹丸发射,在轨道的末端安装光纤探头并利用光子多普勒效应测出金属滑块的滑动速度作为实验结果参考,实验装置如图7所示,实验结果如表2所示。

图7 模拟弹丸运动装置Fig.7 Simulated projectile motion device
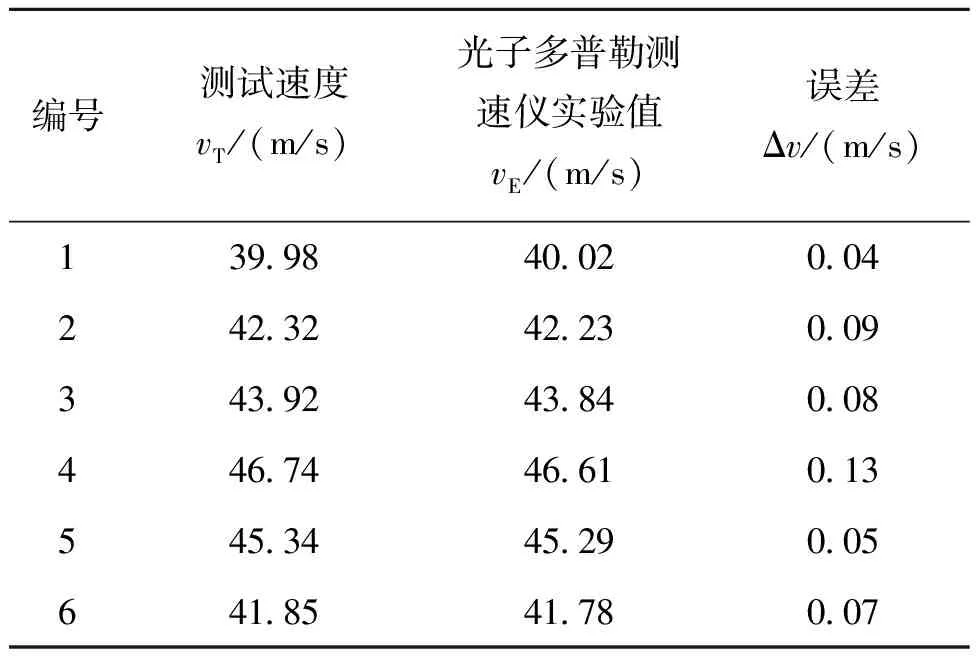
表2 模拟弹丸速度实验测量数据Tab.2 Simulate experimental measurements of projectile velocity
从表2中可以看出弹丸的最大速度误差为0.13 m/s。
4 结论
本文提出基于光电阵列动态扫描的弹丸着靶坐标及速度的测量方法。采用多个红外发光管等间距分布组成的阵列作为发光阵列且多个光电二极管等间距分布组成的阵列作为探测阵列,发光阵列与探测阵列交错排布无缝拼接构成光电阵列坐标靶。系统采取由红外发光管与光电二极管一一对应且依次扫描的方式构成矩形光幕,避免了发光管因发散角过大对不同的探测器产生的串扰问题,保证了光幕均匀性的同时提高了系统的稳定性和分辨率,且实际证明矩形靶面更加有利于系统的拼接。根据实验得出x轴方向的坐标最大误差为1.1 mm,y轴方向的最大误差为1 mm,速度实验测得的最大误差为0.13 m/s,证明本文所提的基于光电阵列动态扫描式的弹丸着靶坐标及速度的测量方法可行。
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
广东造船(2020年1期)2020-05-03 14:01:49
西安交通大学学报(2019年9期)2019-09-10 04:01:22
家庭影院技术(2019年8期)2019-08-27 02:44:50
西安工业大学学报(2018年5期)2018-11-26 11:46:20
西安交通大学学报(2018年1期)2018-01-12 04:25:54
兵工学报(2015年10期)2015-11-21 05:45:28
弹箭与制导学报(2015年1期)2015-03-11 15:32:43
弹箭与制导学报(2015年1期)2015-03-11 15:32:09
