
智能鞋柜的设计与分析
2023-05-05 04:19王岗,李星
模具技术 2023年2期
王 岗,李 星
(西安工程大学,陕西 西安 710000)
0 引 言
当今人工智能产业发展迅猛,智能化时代已经到来,智能家居提升了人民生活质量[1]。鞋柜是日常必备家具,目前存在使用寿命低、功能单一,以及对鞋子的护理达不到用户需求等问题。人机工程学主要研究人、机器和环境系统三者之间的相互协调匹配关系,为产品设计、人体健康及产品功效等问题提供研究方法与理论支撑。人机工程学是基于多个专业相互支撑、相互融合的多学科交叉,研究方法与技术手段主要涉及工程技术、生态学、感性工学、心理学以及美学等多个专业领域。人机工程学使产品与人的生理、心理等各方面因素相适应,以达到人-机-环境的协调和优良匹配,从而使产品更安全、舒适和高效[2-3]。
本文基于人机工程学的设计理念,针对智能鞋柜结构进行了设计与力学分析,研制出了一款人-机-环境相互协调的智能鞋柜,该智能鞋柜在安全稳定、材料环保以及智能辅助方面均能满足人们的需求。
1 整体结构
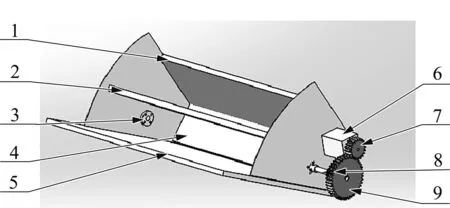
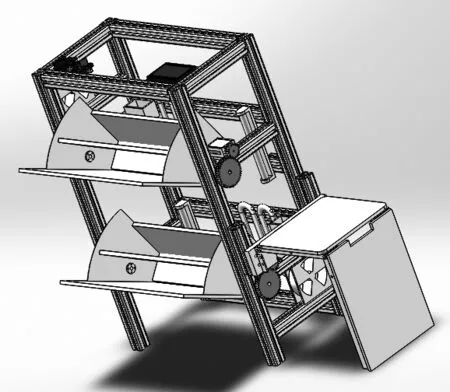
智能鞋柜的三维结构模型如图1所示,主要由翻斗机构、伸缩凳机构及辅助机构组成,由单片机控制器控制电机,实现翻斗的自动开合功能,控制舵机实现伸缩凳的自动打开与收缩功能;辅助装置完成对鞋子的护理功能[4-5]。

1-显示屏;2-单片机控制器;3-法兰盘;4-翻斗;5-伸缩凳;6-大齿轮;7-小齿轮;8-电机图1 智能鞋柜整体结构图Fig.1 Overall structure of intelligent shoe cabinet
2 结构设计与工作原理
2.1 翻斗机构
2.1.1 翻斗机构结构设计
翻斗的结构设计是本款智能鞋柜的关键因素,它既要不浪费整体的框架空间结构,又要有尽可能多的存储空间。该翻斗机构由翻斗上隔板、翻斗中间隔板、法兰盘、翻斗下隔板、翻斗底隔板、电机、小齿轮、传动轴以及大齿轮组成[6]。翻斗机构中,隔板部分采用实木板材制成,而两侧的扣板采用铝合金材料制成,遵循了生态环保和质量轻的原则。翻斗机构结构设计图如图2所示。
1-翻斗上隔板;2-翻斗中间隔板;3-法兰盘;4-翻斗下隔板;5-翻斗底隔板;6-电机;7-小齿轮;8-传动轴;9-大齿轮图2 翻斗机构结构图Fig.2 Structure diagram of tipper mechanism
2.1.2 翻斗机构结构设计工作原理
当用户使用时,将所需服务功能通过人机交互界面传递到控制器,控制器控制电机6运转,电机6带动小齿轮7运动,相啮合的大齿轮9跟着转动,传动轴8跟着大齿轮9运转,传动轴8末端的法兰盘3也做旋转运动,固定在法兰盘3的翻斗也随之打开,待用户完成功能使用之后,重力传感器检测翻斗重量变化,将信号传递至控制器,控制器控制翻斗自动关闭到初试位置,从而实现了翻斗机构的智能打开与关闭功能,如图3所示。
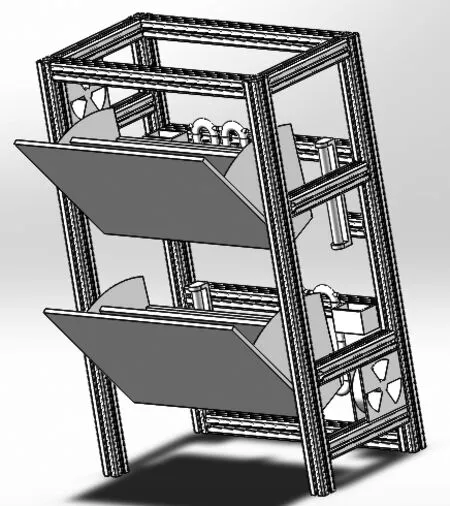
(a) 翻斗机构打开原理图
(b) 翻斗机构关闭原理图
2.1.3 翻斗机构关键零部件设计
齿轮传动在翻斗机构的开合中起关键性作用,它是动力传递的主要零件。根据智能鞋柜的传动需求,现选用一组精度等级为8级的直齿圆柱齿轮做为翻斗机构的传动机构,其中齿轮材料分别为:小齿轮选用硬度为270 HBS的调质40Cr,大齿轮选用硬度为240 HBS的调质45号钢[7]。对翻斗机构进行模拟运动试验后,根据对运动速度的要求,以及查询相关文献资料后,最终确定齿轮机构传动比i=2.1,小齿轮的齿数Z1=20,由公式:i=Z2/Z1得出大齿轮的齿数Z2=42。
按照弯曲疲劳强度设计要求,选用荷载系数Kt=2.0,小齿轮传递的转矩T1=0.98 N·m。齿宽系数Φd=1.0,齿轮的应力循环次数N1=2.4×109,N2=1.143×109,弯曲疲劳强度系数KFN1=0.90,KFN2=0.92,f取最小安全系数Smin=1.35。齿形系数YFS1=4.35,YFS2=3.95,弯曲疲劳强度σFLmin1=485 MPa,大齿轮σFLmin2=397 MPa,取安全系数S=1.35,弯曲疲劳强度σF1=323.3 N·mm-2,σF2=270.5 N·mm-2。
1) 采用设计计算公式进行齿轮模数的初步确定,即:
(1)
式中:m为模数。
2) 由于大齿轮的弯曲疲劳强度较弱,所以应将
代入式(1),求得
mt≥1.825 mm。
(2)
3) 计算小齿轮齿宽
d1t=mt·Z1=36.5 mm,
(3)
b1=φd·d1t=36.5 mm。
(4)
4) 计算齿轮圆周速度
(5)
5) 计算载荷系数
根据v=1.834 m·s-1,参考文献资料,选择8级精度做为齿轮的精度等级,符合设计要求。并根据系数KA=1,由文献资料查得载荷系数Kv=1.19,对于没有进行表面硬化处理的8级精度直齿齿轮,经文献资料查询得出齿轮间的载荷分配系数KFα=1.1[8-9]。
KFB=KHB
=(1+10%)×[1.23+0.18(1+0.6
×102)+0.61×103×36.5]
=1.540。
(6)
故:
K=KA·Kv·KFα·KFB
=1×1.19×1.1×1.540=2.016。
(7)
6) 计算齿轮传动模数
(8)
由于考虑磨损,所以m应加大10%~20%:
m=1.830×(1.1~1.2)=2.013~2.196,
(9)
即取m=2.0。
7) 分度圆直径:
D1=mz=2×20=40 mm,
(10)
D2=mz=2×42=84 mm。
(11)
通过查阅相关专业文献资料和计算,得出齿轮机构相关技术参数,如表1所示。
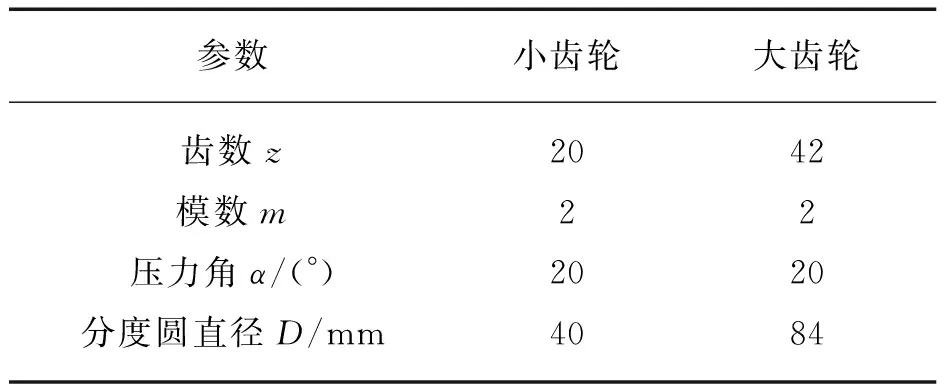
表1 齿轮特性参数Tab.1 Characteristic parameters of gear
2.2 伸缩凳机构
2.2.1 伸缩凳机构结构设计
伸缩凳是智能鞋柜重要的组成部分,它的设计和加工质量对智能鞋柜同样起着至关重要的作用。如图4所示,该伸缩凳机构主要由伸缩凳架板、舵机、连杆、连接件1、连接件2、重力传感器以及连接件3组成。为了满足伸缩凳强度高、刚性好、形变量小、舒适度好等特点,经试验后选用铝合金、亚克力和软皮等材料做为伸缩凳的使用材料。
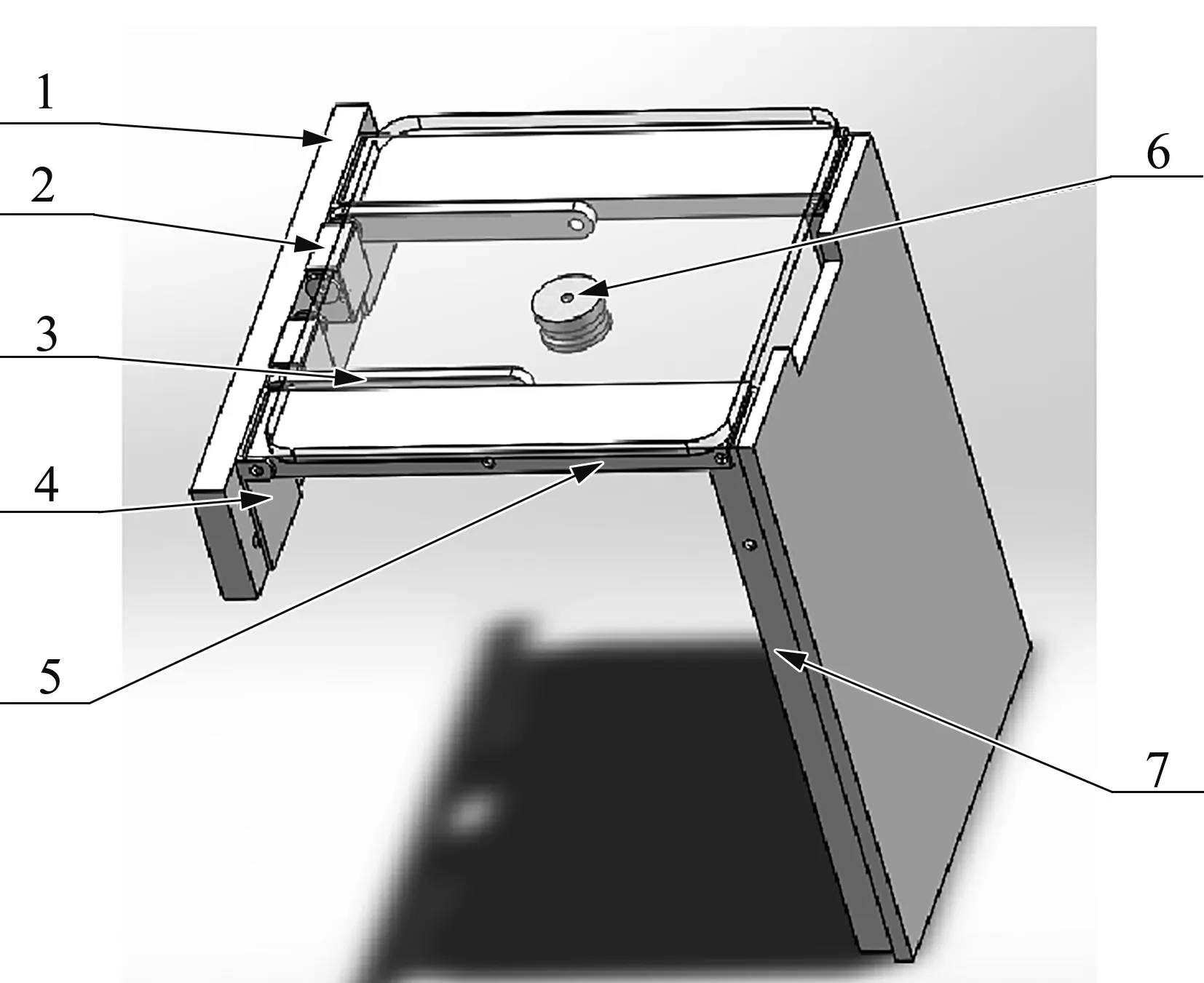
1-伸缩凳架板;2-舵机;3-连杆;4-连接件1;5-连接件2;6-重力传感器;7-连接件3图4 伸缩凳结构设计图Fig.4 Structure design drawing of telescopic stool
2.2.2 伸缩凳机构工作原理
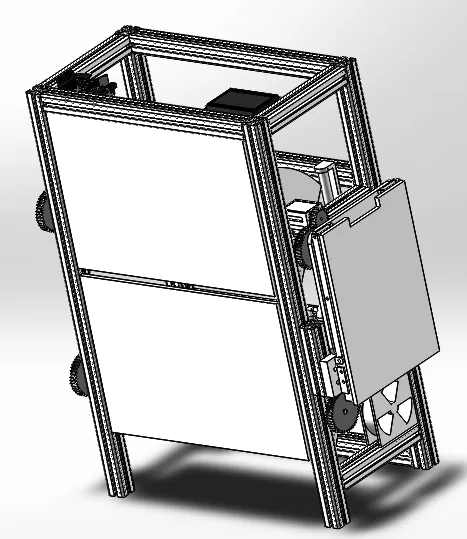
伸缩凳机构工作原理图如图5所示,用户通过人机交互界面选择服务功能后,将信号传递至单片机控制器,单片机控制器同时控制电机和舵机2运转,舵机2带动连杆3,连杆3带动伸缩凳由初始位置转动90°,伸缩凳在连杆3的带动作用下,由打开状态转变为关闭状态。[10]收起过程是用户完成换鞋动作后,重力传感器6感受重力的变化,将信号反馈至控制器,控制器控制舵机2,使伸缩凳自动关闭为初始位置,从而实现了伸缩凳机构的智能打开与关闭功能。
(a) 伸缩凳打开
(b) 伸缩凳关闭
伸缩凳设计的关键在于其承载能力,凳子需要满足强度高、刚性好、形变量小等特点。连杆是伸缩凳自动打开与关闭装置中最关键的零部件,它的使用寿命决定了伸缩凳自动开合装置的使用寿命。连杆零部件选用铝合金材料,以满足其承载能力的使用要求[11-12]。连杆是舵机与伸缩凳之间的过渡零件,它的一侧固连在舵盘上,另一侧安装在伸缩凳上,它的作用就是将舵机输出的扭转力传递至伸缩凳,连杆零部件结构如图6所示。
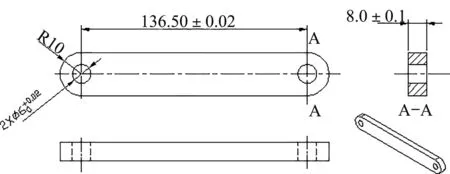
图6 伸缩凳连杆结构图Fig.6 Connecting rod structure of telescopic stool
2.2.3 伸缩凳工作动力设计
伸缩凳的材料为铝型材和钢板,它的质量在2~3 kg,需满足承载人体约80 kg左右的质量。伸缩凳在打开和关闭过程中舵机的选型需要扭矩大,旋转精度高和虚位小等特点,方可使伸缩凳能够正常地打开与关闭。根据计算,选择如图7所示的型号为LX-224的舵机,舵机扭矩为20 kg·cm,舵机特性参数如表2所示。

图7 LX-224舵机选型图Fig.7 Selection diagram of LX-224 steering gear
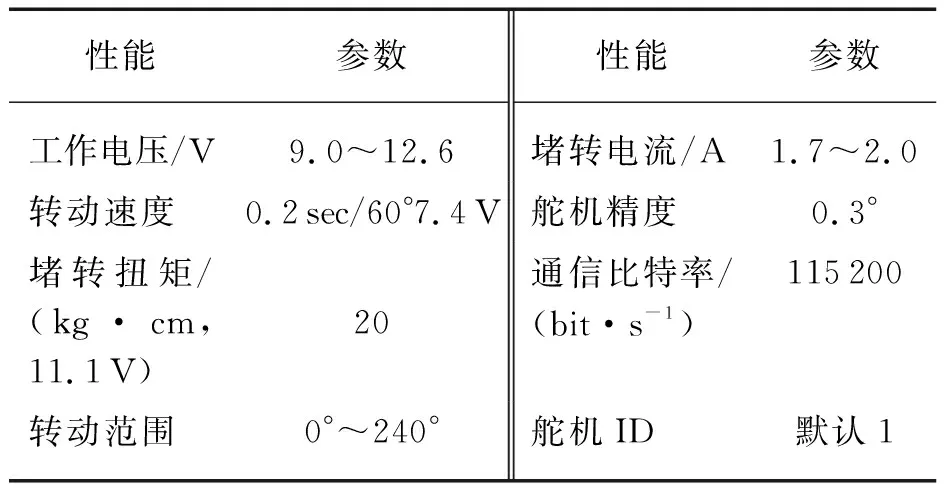
表2 舵机特性参数Tab.2 Characteristic parameters of steering gear
2.3 辅助装置设计
2.3.1 智能杀菌消毒装置
在当前新型冠状病毒在全球肆虐的复杂环境下,对用户从室外进入家中的鞋子消毒尤为重要,选择对有害物质杀灭率高、灯光照射面积广、紫外线强度高和使用寿命长的紫外线杀菌灯作为杀菌消毒装置,通过智能控制系统实现其开关和时间控制[13]。紫外线消毒灯特性参数如表3所示,根据用户所定制的智能鞋柜规格尺寸来选择不同功率大小的紫外线消毒灯。
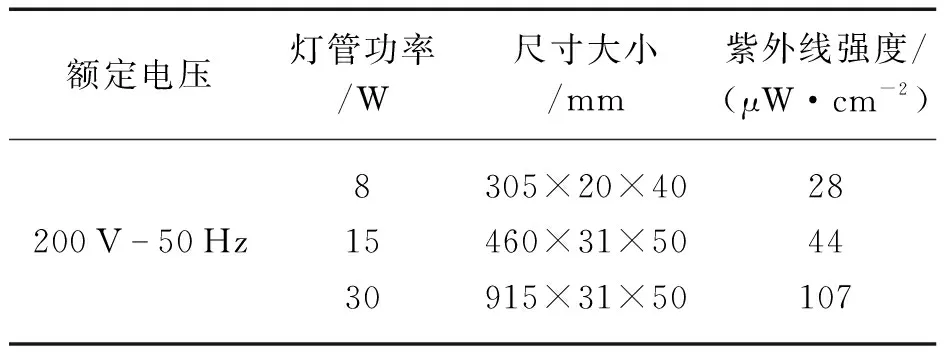
表3 紫外线消毒灯特性参数Tab.3 Characteristic parameters of ultraviolet disinfection lamp
2.3.2 智能烘干装置
采用烘干器对鞋子进行烘干,烘干器内置两个PTC发热体,分别置于环状烘干器的两侧,可以适应多种鞋型的烘干操作,烘干器最高可以达到150 ℃。通过烘干器可以解决鞋子潮湿的问题也可以杀死微生物[14],烘干器特性参数如表4所示。
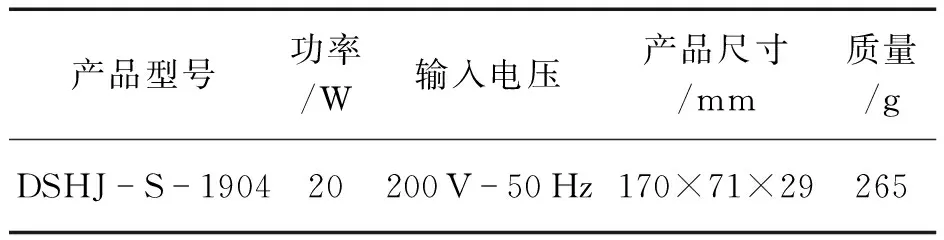
表4 烘干器特性参数Tab.4 Dryer characteristic parameters
3 实验结果与分析
齿轮机构和连杆机构是整个智能鞋柜受力的关键零件,因此,采用Simulation软件对关键零部件的最大应力、最大变形位移,以及最大变形量和最小变形量进行了分析研究。图8为齿轮机构的受力分析图。

(a) 应力图

(b) 位移图

(c) 应变图
通过对齿轮受力分析图的分析得出了齿轮机构受力分析参数(表5)。根据设计要求分析,智能鞋柜在运动过程中齿轮所承受的扭转力为0.98 N·m,因此,其最大应力为17.31 MPa,并且发生在齿顶处,应力远比理论值小,即满足设计和使用要求。最大变形位移为0.002 018 mm,可以忽略不计。齿轮在受到0.98 N·m的扭转力时,发生形变的最大值为2.776×10-5mm,最小值为2.047×10-10mm,此变形量过小,可以忽略不计,因此本设计满足运动所需的要求。
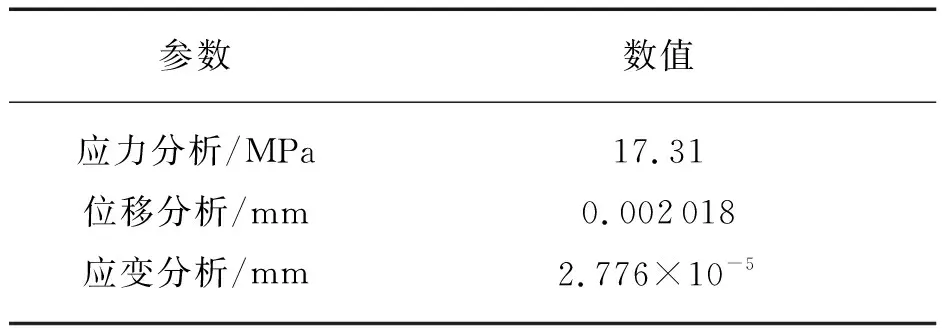
表5 齿轮机构受力分析参数表Tab.5 Force analysis parameters of gear mechanism
其次对连杆机构进行了受力分析,图9为连杆机构的受力分析图。
通过对图9(a)的分析得出了连杆机构受力分析参数(表6)。在运行的过程中,连杆机构处于悬臂梁状态,经过实验计算和查阅相关文献得出连杆所承受的扭转力为2.352 N·m。智能鞋柜的结构设计要求其在运动过程中承载着较大的扭转力,通过Simulation软件进行受力分析后得出连杆的最大应力在连杆与舵机的连接处,为7.509 MPa,满足使用要求。连杆最大位移量为0.002 mm,可以忽略不计。连杆在受到2.352 N·m的扭转力时,发生形变的最大值为2.500×10-5mm,此变形量过小,可以忽略不计,因此满足运动所需的要求。
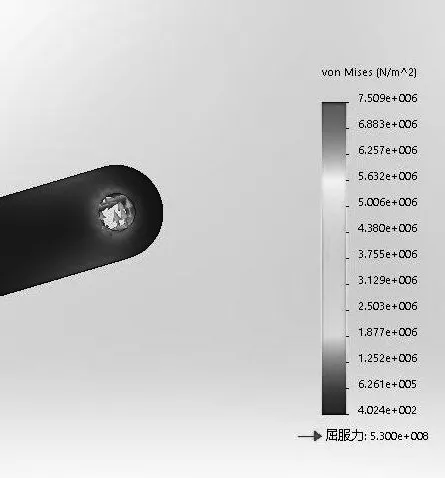
(a) 应力图

(b) 位移图
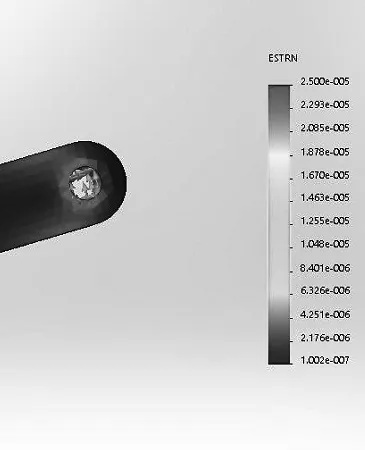
(c) 应变图
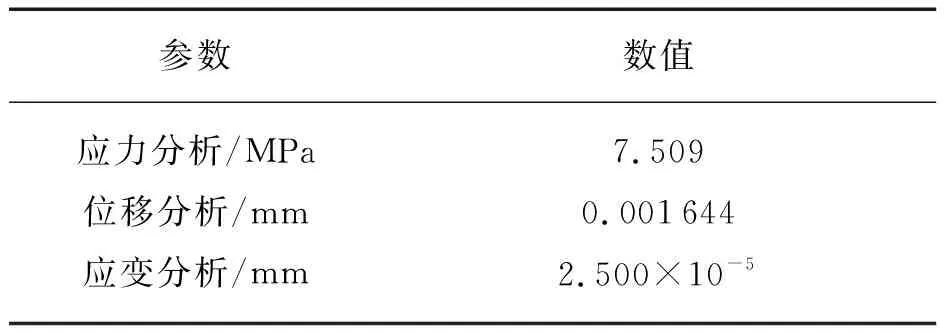
表6 连杆受力分析参数表Tab.6 Force analysis parameters of connecting rod
根据实验数据分析结果,所设计的智能鞋柜在应力、位移和应变方面均能满足设计要求和使用标准,保障了智能鞋柜的打开与关闭,鞋子的容纳量,伸缩凳的承载力、安全性以及智能辅助等方面的正常使用。
4 结 论
将工业产品设计与智能家居相结合,设计出了一款智能鞋柜。通过Solidworks和Simulation软件对智能鞋柜的整体结构、零部件设计,以及关键零部件的受力和耐用度进行了研究和分析。结果表明:该智能鞋柜在安全稳定、材料环保以及智能化方面均能满足人们的需求。该款智能鞋柜实现了对鞋子的合理收纳及护理功能,同时为用户提供舒适、安全的人性化和智能化的体验感受,为提升鞋柜在智能家居中的地位作出贡献。
猜你喜欢
技术与市场(2022年7期)2022-07-16
少儿科学周刊·少年版(2020年9期)2020-03-04
自动化学报(2019年6期)2019-07-23
水泥技术(2019年1期)2019-02-26
电子测试(2018年6期)2018-05-09
电子制作(2018年1期)2018-04-04
Coco薇(2017年10期)2017-10-12
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
知识就是力量(2014年1期)2014-02-21
