
侧扫声呐图像海底线自动提取方法研究
2023-04-29 10:45:49谢政轩李改肖代柯
中国科技投资 2023年30期
关键词:图像
谢政轩 李改肖 代柯
摘要:侧扫声呐方法在使用中经常存在图像受外界因素的干扰,导致海底线难以被精准检测与提取。针对这个问题,本文结合侧扫声呐的图像特点以及成像机理,对其图像海底线的自动提取方法进行深入研究。实践表明,自动提取方法可有效解决悬浮物遮挡和海况差等问题,能够在复杂环境下对海底线进行自动精准检测与提取,具有良好的使用效果。
关键词:侧扫声呐;图像;海底线;自动提取
DOI:10.12433/zgkjtz.20233043
在海洋科学和海洋工程研究中,侧扫声呐技术具有十分重要的作用。它可以通过回声探测的管理对海底的地形地貌以及水下物体情况进行弹射,又称海底地貌仪。侧扫声呐瀑布图中的海底线表征拖鱼到海底的具体情况,是进行目标量测、图像灰度均衡化处理以及斜距改正等操作的关键性参数指标之一,其精准性会直接影响后续计算结果质量。在实际应用时,海绵回流、脉冲发射等情况都会对侧扫声呐瀑布图像水柱区造成较明显的干扰,导致后续研究图像出现错位或畸变等问题,因此,需要对海底线自动提取方法进行深入研究。
一、侧扫声呐图像成像机理
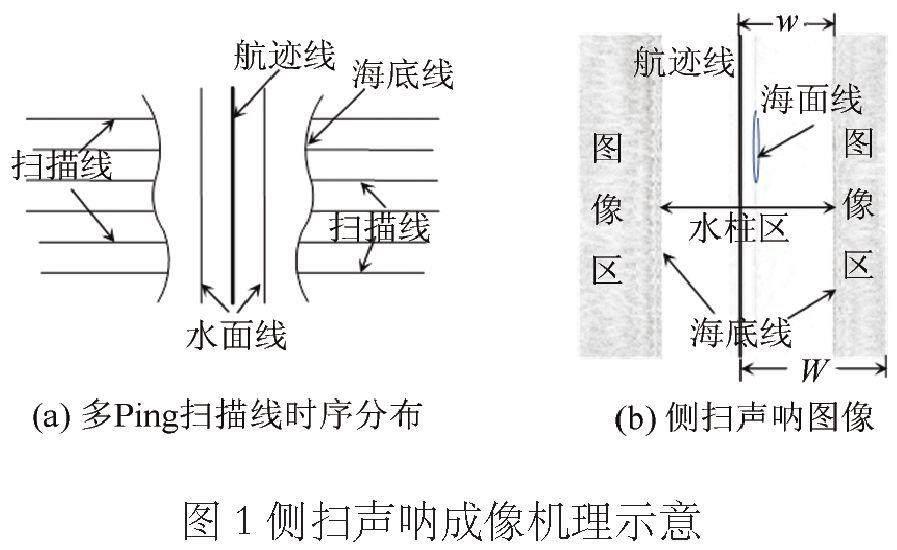
侧扫声呐技术是利用拖鱼的换能器装置,再通过束控技术形成两束扇形波束,并基于球面波形式传播到海底环境,并依据距离参数反向散射回换能器,以此得到时序回波,然后在侧扫声呐图像中会形成扫描线。侧扫声呐在发射声波后及时接收回波,在海水环境中的传播耗时情况会在图像中形成水柱区图像。换能器系统接收海底回波时序信号,形成图像区。两个图像区的交界位置是垂直波束在海底形成的首个回波图像,可以表征海底情况,具体情况如图1所示。
二、侧扫声呐图像海底线自动提取方法分析
(一)最后峰值法
根据侧扫声呐的成像原理,ping扫描线的灰度曲线在区域变化时会在海底线的位置处出现突变,进而在图像信息中形成尖峰,实现了对海底情况的有效跟踪测量。而在拖鱼下方位置发生上述干扰情况时,会导致曲线的水柱区出现多个尖峰图像,此时单峰检测方法失效。在存在多个尖峰情况时具有以下特点:第一,尖峰两侧的灰度G0与图像区相比较小,其变化规律为G0-G1-G0-G2…,G0在进入图像区后消失。第二,尖峰灰度G和相邻灰度G0间的差值?G变化相对明显,而在图像区的变化较小。
能够设定相邻区域的灰度差值变化为?G0,水柱区的峰值检测原则为:?G0<|?G|。假设峰值灰度和水柱区的相邻灰度都符合上述原则,同时与图像区相邻灰度不符合上述原则,则可以认定为该峰为最后峰,即海底点的实际位置。上述方法是利用单ping扫描线的最后峰值法。
利用最后峰值法检测海底线的关键在于?G0参数的精准性。?G0在侧扫声呐图像中会随着位置不同而发生变化,在实际操作中会存在一定的困难性。因此可通过以下方法对?G0进行自动检测以及海底线提取:
(1)依据过往检测经验设定经验阈值?G0,然后将回波区与水柱区区分开。理论上来讲,水柱区的图像灰度为0,然后考虑实际海洋环境中的因素干扰,可将其设定在20以下。
(2)基于?G0对每个ping扫描线进行海底线的跟踪检测,并将正确跟踪与错误跟踪区分。
(3)选取正确跟踪数据对?G0进行计算,同时求取各海底点的实际深度与平均深度;对错误跟踪数据进行?G0计算,结合正确跟踪数据对其进行参数校正与重新检测。
(4)重复上述操作直至全部ping扫描线完成正确跟踪检测。
(二)海底线综合跟踪
在最后峰值法的基础上,将卡拉曼滤波、基于海床渐变性的异常跟踪段修复方法融入其中,形成综合跟踪检测方法。具体实施流程如下:
首先利用最后峰值法进行海底点跟踪检测,然后依据对称原则对正确区段是否增加进行判断。如果判断结果为是,则重复执行最后峰值法;如果判断结果为否,则进入下一个操作环节。针对错误跟踪段建立的公式:
其中,H代表异常地段的拖鱼或者地形高度;l代表ping位置与参考点之间的距离;a0和aj代表多项式模型系数,j=1,2,3,...,N;N代表模型阶数。
为保证公式计算结果的精准性,还要基于海底跟踪精度σ0和模型精度σm对N进行确定。侧扫声呐首个回波与测深具有相同功效,因此可将σ0设置为3%的水深。对σ0和σm进行对比分析,如果σm参数比较大,则对模型阶数N进行调整变动;如果σm参数比较小,则视为符合检测需求。基于错误跟踪段的能够计算拖鱼高度,进而得到海底线信息。
基于对称原则会错误跟踪段进行判断分析,会存在两侧全部跟踪错误或一侧跟踪正确的情况,因此,可利用地形变化的一致性原则进行具体判断。
将k错误跟踪段与ping位置对应,随后对模型精度与拖鱼高度进行计算,与初始海底点的拖鱼高度今夕习惯对策分析,通过下述公式对错误侧分析:
?mean<3σ0,正确
其中,?mean=Mean ({?k}), k = 1,2,..., m,Mean代
表平均函数;m代表异常段的ping扫描线数量,?k代表初始海底点拖鱼高度与k错误跟踪段拖鱼高度的差值。
在单侧段跟踪正确的情况下,如果一侧跟踪正确,则另一侧跟踪错误,基于对称原则将正确段参数赋值到另一侧;在两侧均跟踪错误的情况下,利用模型对拖鱼高度进行计算,同时计算航迹线与海底线之间距离,最后能够得到最终的海底线位置。
针对海水中存在悬浮物情况,利用卡拉曼滤波对悬浮物的影响进行修复。卡拉曼滤波的状态和量测方程如下:
Xk = AXk – 1+ Wk – 1
Zk = HXk + Vk
其中,Xk代表第k条ping扫描线的状态向量;A代表转移矩阵,取值为1;Wk-1代表状态噪声,属于高斯白噪声,方差为Q、R,初始值设置为σ0;Zk代表第k条ping扫描线对应的拖鱼高度;H代表量测矩阵,取值为1;Vk代表观测噪声,属于高斯白噪声,方差为Q、R,初始值设置为σ0。
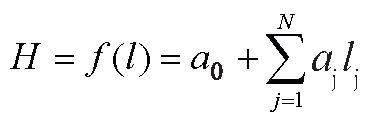
经过卡拉曼滤波处理后即可得到最终的海底线跟踪检测结果,图2为卡拉曼滤波的实际应用效果。通过分析可以发现,卡拉曼滤波处理可以大幅度提高海底线图像的精准性。
三、案例分析
为验证上述方法的实际应用效果,以某水域的实测侧扫声呐图像作为研究对象,进行海底跟踪测量工作。在实验区域内设计有3条测线,其中1测线与2测线为单波束覆盖,侧扫声呐仪器设置为150m扫幅、100kHz的频率。3条测线的长度分别为3054m、3100m和3090m,实验区的水深变化为8~45m,水体中的悬浮物相对较多,因此得到的侧扫声呐图像信息质量比较差。
在实验过程中使用传统阈值法、最后峰值法以及该文提出的综合检测方法进行海底线自动提取操作。使用综合检测方法时将海底跟踪精度设计为0.1m,?G0设置为10,d=10。3条测线的实际测量情况如图3所示。
通过图像信息分析可以发现,使用传统阈值法时具有较大的缺陷型,海底线的图像缺少精准性;使用最后峰值法时虽然可以解决水柱区存在干扰图像的问题,但是在悬浮物横跨水柱区的条件下难以实现精准的图像跟踪提取;提出的综合检测方法与上述两种方法相比具有明显的可靠性,可有效解决上述问题,保证海底线跟踪与提取结果的精准性与完整性。
使用本研究的检测方法对其与两条测线进行检测,在复杂海水区域的海底线图像提取结果如图4所示。用S1和S2代表1测线与2测线,用A和B代表测线中存在的复杂环境。
通过图像分析可以发现,基于本研究提出的综合检测方法提取的侧扫声呐图像能够清晰直观的反映出真实的海底线情况。
参数?G0通过上述方法确定,利用1测线对d和σ0对海底线的跟踪检测结果精度影响进行分析,以实际测量数据作为基础分析能够发现,σ0参数越大,对应的跟踪精度越低,究其原因,在门限放宽的情况下小异常段未能及时检测跟踪,在σ0=1时具有最高的跟踪精度,与前文描述的理论基础相契合。d参数过大会降低海底线跟踪精度,过小则会导致跟踪检测效率明显下降,而在连续异常的情况下难以及时发现异常,这与门限滤波基本原则相符。
对本研究提出的综合检测方法的提取精度进行分析,依据侧扫声呐中的1图像与2图像中的海底线对海底地形高度进行计算,随后进行该实验区域的海床DEM图绘制,同时利用实测单波束的地形数据绘制海床DEM进行对比分析,基于分析结果能够发现,两者得到图像数据具有明显的一致性,1条带的偏差均方根为±18cm,2条带的偏差均方根为±16cm,与实际检测提取得到的深度精度参数保持一致,由此表明本文提出的方法具有实际应用效果。
四、结论
综上所述,传统侧扫声呐海底线图像提取方法中存在悬浮物影响、海洋环境噪声影响等问题,导致海底线图像的提取精度与质量较差。基于此,该文在最后峰值法的基础上将卡拉曼滤波和基于海床渐变性的异常跟踪段修复方法等方法融入其中,以此得到新的海底线综合检测与提取方法。最后基于实际验证可以发现,该方法在具体应用中具有良好的效果,可以基于对称原则对跟踪检测的正确性进行精准判断,保障侧扫声呐图像海底线提取的精准性与完整性。
参考文献:
[1]王晓.侧扫声呐图像精处理及目标识别方法研究[J].测绘学报,2021,50(02):282.
[2]库安邦,周兴华,王方旗,等.一种联合单波束测深的侧扫声呐海底线提取方法[J].海洋通报,2019,38(01):47-52.
[3]王涛,潘国富,张济博.基于K-means聚类与数学形态学的侧扫声呐图像目标轮廓自动提取方法[J].海洋科学,2019,43(08):80-85.
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:08:06
成都信息工程大学学报(2021年2期)2021-07-22 07:23:16
中学生数理化·高一版(2021年4期)2021-07-19 09:00:52
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:04
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:06
成都信息工程大学学报(2020年5期)2020-07-29 08:50:08
作文小学中年级(2020年6期)2020-07-24 08:33:10
雷达学报(2020年2期)2020-05-23 11:58:08
中学生数理化·高一版(2020年3期)2020-04-21 08:03:22
雷达学报(2018年5期)2018-12-05 03:13:24
